Изобретение относится к транспортному машиностроению, а именно к транспортным средствам, предназначенным для погрузки и перевозки транспортных средств, преимущественно легковых автомобилей, а также иных грузов.
Известен эвакуатор-автовоз (RU148442U1), содержащий шасси базового автомобиля, гидравлическую систему, загрузочную надстройку, состоящую из нижней и верхней платформ, гидроцилиндры подъема верхней платформы, лебедку, расположенную на нижней платформе, переднюю стойку, размещенную в передней части нижней платформы, заездные аппарели, при этом гидроцилиндры подъема расположены в задней части эвакуатора, шарнирно закреплены на верхней и нижней платформах и снабжены кожухами с отверстиями для установки фиксатора, обеспечивающего фиксацию гидроцилиндров.
Известен эвакуатор-автовоз (RU149951U1), содержащий шасси базового автомобиля, гидравлическую систему, загрузочную надстройку, состоящую из нижней и верхней платформ, гидроцилиндры подъема верхней платформы, лебедку, расположенную на нижней платформе, переднюю стойку, размещенную в передней части нижней платформы, выдвижные аппарели, при этом передняя стойка состоит из левой и правой опор, соединенных поперечиной, и имеет уклон от вертикального положения в сторону расположения кабины автомобиля, при этом на поперечине размещены передние опорные точки верхней платформы, которые представляют собой цилиндрические шарниры с одной степенью свободы. При подъеме платформы и после загрузки перевозимых автомобилей в кожух гидроцилиндра с отверстиями устанавливается фиксатор в ближайшее к торцу гильзы цилиндра отверстие. После этого платформа опускается вниз до упора. Таким образом, платформа фиксируется в поднятом положении механически, а фиксатор предохраняет систему при транспортировке и исключает самопроизвольное опускание верхней платформы при эксплуатации в случае выхода гидросистемы из строя.
Известные эвакуаторы-автовозы позволяют одновременно загружать и перевозить два эвакуируемых автомобиля, но при необходимости перевозки только одного автомобиля приходится либо поднимать верхнюю платформу (чрезмерные временные и энергетические затраты), либо устанавливать, закреплять и транспортировать автомобиль на верхней платформе, имеющей довольно большой наклон, то есть с меньшей надёжностью.
В качестве прототипа выбран автомобиль-эвакуатор (RU74867U1), содержащий шасси базового автомобиля, гидравлическую систему, загрузочную платформу, состоящую из нижней и верхней платформ, гидроцилиндры подъема верхней платформы, лебедку, расположенную на нижней платформе, переднюю стойку, размещенную в передней части нижней платформы, вторые стойки, установленные по бокам нижней платформы в задней ее части и снабженные элементами фиксации положений поднимаемой верхней платформы, заездные аппарели, при этом в передней части верхней платформы шарнирно на осях установлены буксы, которые в свою очередь размещены в направляющих, выполненных по бокам передней стойки, при этом направляющие имеют фиксации положения букс, причем опоры гидроцилиндров на верхней платформе размещены впереди центра масс верхней платформы.
Размещение опор гидроцилиндров на верхней платформе впереди центра масс верхней платформы создаёт слишком большой консольный участок верхней платформы, что влечёт необходимость фиксации поднятой верхней платформы на дополнительных задних стойках для упрочнения, придания конструкции большей жёсткости. Это техническое усложнение.
Изобретение направлено на устранение вышеуказанной технической проблемы, то есть решается задача создания эвакуатора-автовоза, предназначенного для перевозки одновременно двух автомобилей (или других видов груза), позволяющего, в то же время, перевозить один автомобиль (или другой вид груза), когда нет необходимости задействовать верхнюю эвакуаторную платформу, с надежностью и временем загрузки, присущими одноместным эвакуаторам.
Указанная техническая проблема решается эвакуатором-автовозом, содержащим шасси базового автомобиля, гидравлическую систему, загрузочную надстройку, состоящую из нижней и верхней платформ, гидроцилиндры подъема верхней платформы (с механизмом фиксации для предотвращения самопроизвольного движения верхней платформы или без такового), лебедку, расположенную на нижней платформе, переднюю стойку в передней части нижней платформы, на которой размещены передние опорные точки верхней платформы, выдвижные аппарели, передние опорные точки верхней платформы выполнены с двумя степенями свободы с обеспечением возможности приближения к нижней платформе и удаления от неё, в котором, согласно предложению, полный подъём верхней платформы обеспечен за счёт возвратно-поступательного движения штоков гидроцилиндров, при этом предусмотрена возможность фиксации верхней платформы в промежуточных положениях.
Заявленное устройство поясняется чертежами.
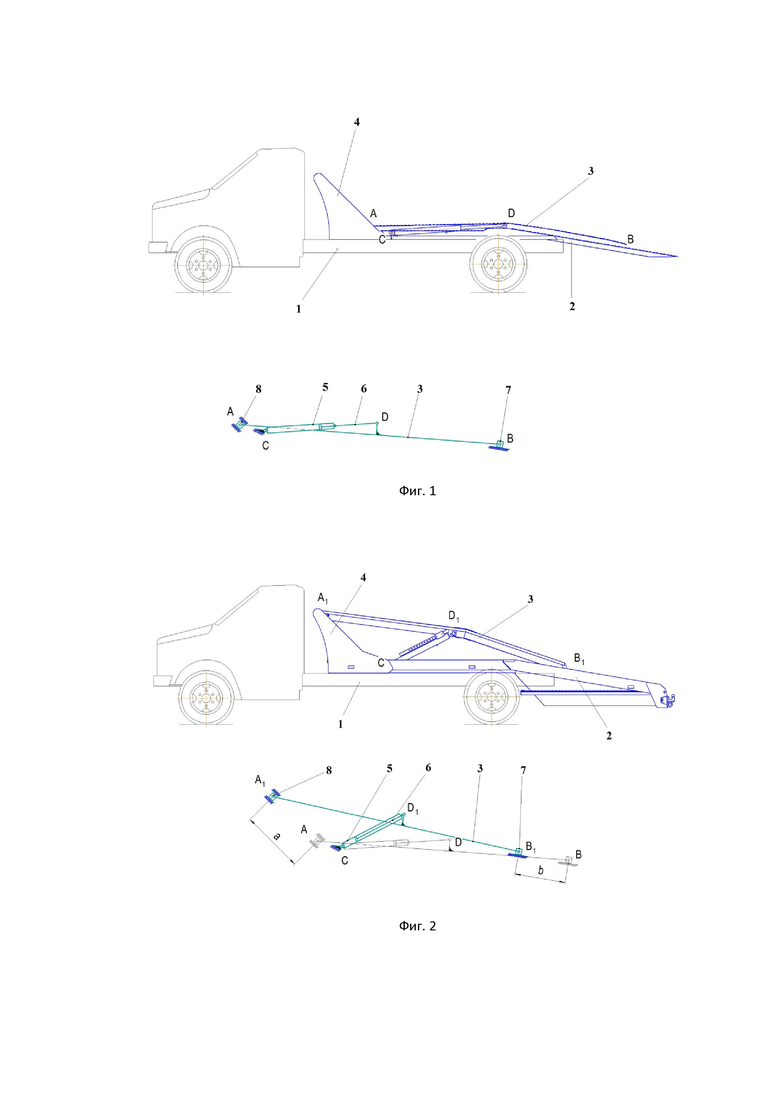
На фиг. 1 показан вид сбоку на эвакуатор-автовоз с полностью опущенной верхней платформой и соответствующая данному положению кинематическая схема.
На фиг. 2 показан вид сбоку на эвакуатор-автовоз с поднятой передней частью верхней платформы и соответствующая данному положению кинематическая схема.
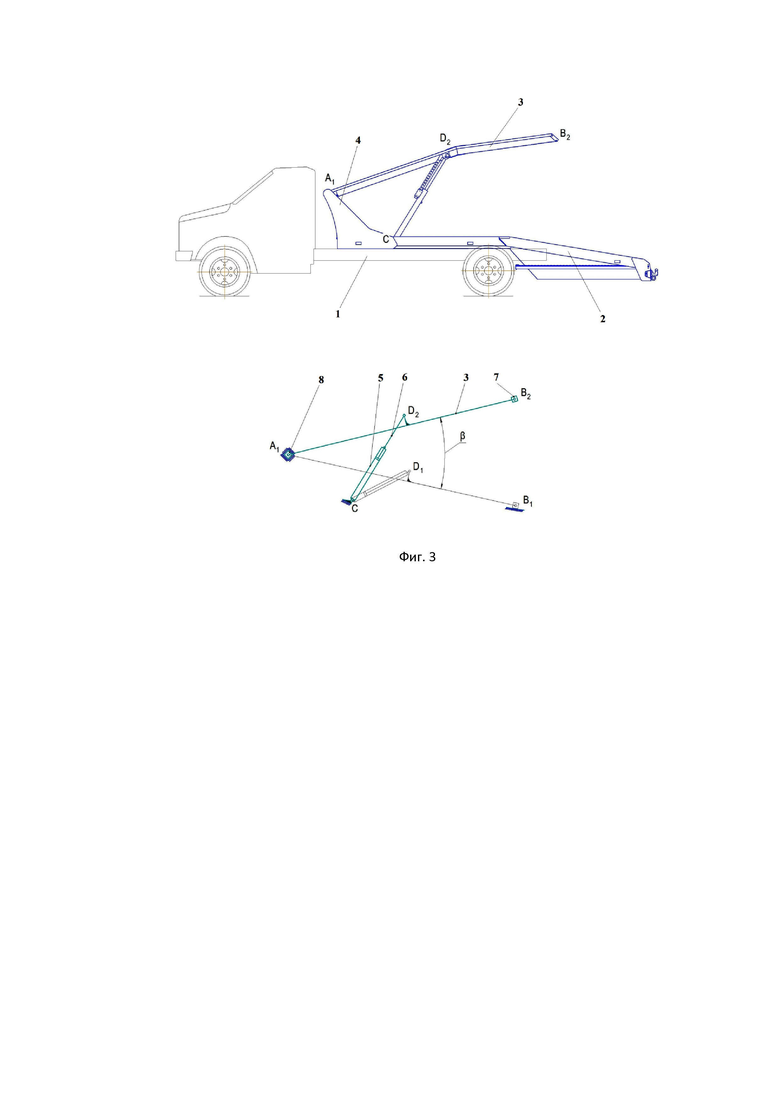
На фиг. 3 показан вид сбоку на эвакуатор-автовоз с полностью поднятой верхней платформой и соответствующая данному положению кинематическая схема.
Эвакуатор-автовоз содержит шасси базового автомобиля 1, гидравлическую систему (не показана), загрузочную надстройку, состоящую из нижней 2 и верхней 3 платформ, лебедку, расположенную на нижней платформе (не показана), переднюю стойку 4 в передней части нижней платформы 2, на которой размещены передние опорные точки верхней платформы 3, выдвижные аппарели (не показаны).
Механизм подъёма верхней платформы 3 состоит из гильзы гидроцилиндра 5, штока гидроцилиндра 6, заднего шарнира 7 верхней платформы 3 (позволяет перемещаться заднему краю платформы вдоль настила нижней платформы 2 в плоскости, параллельной продольной оси эвакуатора и перпендикулярной настилу нижней платформы, а также не препятствует отрыву заднего края верхней платформы 3 от настила нижней платформы 2 в той же плоскости), переднего шарнира 8 верхней платформы 3 (позволяет перемещаться переднему краю верхней платформы 3 вдоль направляющей стойки 4 в плоскости, параллельной продольной оси эвакуатора и перпендикулярной настилу нижней платформы, а также не препятствует повороту верхней платформы 3 относительно нижней платформы 2 в той же плоскости).
Эвакуатор-автовоз эксплуатируется следующим образом.
При движении в порожнем состоянии платформа 3 плотно примыкает к платформе 2 (фиг. 1), шток 6 гидроцилиндра полностью выдвинут. При необходимости загрузки на эвакуатор-автовоз только одного автомобиля этот автомобиль устанавливается непосредственно на платформу 3 (с помощью выдвижных аппарелей), находящуюся в вышеуказанном положении, закрепляется и транспортируется в точку доставки.
При необходимости транспортировки двух автомобилей (не показаны) первый автомобиль, как и в предыдущем варианте, устанавливается на платформу 3 и закрепляется. Далее задействуется механизм подъёма.
При подаче рабочей жидкости (гидравлического масла) в штоковую полость гильзы гидроцилиндра 5 происходит перемещение (втягивание) штока 6 (фиг. 2), при этом шарнир 8 перемещается из положения А в положение А1 на расстояние «а» вдоль направляющей стойки 4, а шарнир 7 перемещается из положения В в положение В1 по настилу нижней платформы 2 (на расстояние «b»). Количество подаваемой рабочей жидкости в штоковую полость гильзы гидроцилиндра 5 определяет конечное положение шарнира 8 (крайнее верхнее положение, либо одно из промежуточных, в зависимости от габаритов загружаемого на нижнюю платформу автомобиля (груза)). Выбранное положение шарнира 8 фиксируется от смещения вдоль направляющей стойки 4 при помощи стальных пальцев. При фиксированном от смещения вдоль направляющей стойки 4 шарнире 8 (в положении А1) и при подаче рабочей жидкости в поршневую полость гильзы гидроцилиндра 5 происходит перемещение (выдвижение) штока 6 и поворот верхней платформы 3 вокруг шарнира 8 на угол β с отрывом от настила нижней платформы 2 заднего края платформы 3(точка В1 перемещается в точку В2 – фиг. 3). Далее производится загрузка второго автомобиля по известной схеме.
Разгрузка автовоза-эвакуатора производится в обратном порядке.
Таким образом, работа автовоза-эвакуатора оптимизирована для перемещения как одного автомобиля (груза), так и для перемещения двух автомобилей (грузов).
Следует отметить, что в разделе «осуществление изобретения» кинематическая схема приведена в качестве предпочтительного варианта реализации, при этом очевидно, что изобретение может быть реализовано с использованием иных кинематических схем.
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРНО-СИЛОВАЯ КОНСТРУКЦИЯ АВТОЭВАКУАТОРА С ЧАСТИЧНОЙ ПОГРУЗКОЙ | 2008 |
|
RU2391228C1 |
| Способ эвакуации аварийной машины и эвакуатор для его осуществления | 2022 |
|
RU2785376C1 |
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ПЕРЕВОЗКИ АВАРИЙНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2233752C1 |
| ПОДЪЕМНИК АВТОМОБИЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ | 2009 |
|
RU2399578C1 |
| УСТАНОВКА ДЛЯ ПРОВЕДЕНИЯ СПУСКО-ПОДЪЕМНЫХ ОПЕРАЦИЙ В СКВАЖИНАХ С НАКЛОННЫМ УСТЬЕМ | 2017 |
|
RU2641677C1 |
| МОБИЛЬНАЯ ТЕЛЕСКОПИЧЕСКАЯ БУРОВАЯ УСТАНОВКА ВЕРТИКАЛЬНОГО БУРЕНИЯ | 2013 |
|
RU2538550C1 |
| ДЕСАНТНЫЙ ТАНКОВЫЙ ПАРОМ | 2005 |
|
RU2296080C1 |
| Автомобильный кран | 2017 |
|
RU2676900C1 |
| СТРЕЛОВОЙ ГРУЗОПОДЪЕМНЫЙ КРАН | 2014 |
|
RU2572354C1 |
| Самосвальное транспортное средство | 1990 |
|
SU1787827A1 |
Изобретение относится к транспортному машиностроению, а именно к транспортным средствам, предназначенным для погрузки и перевозки транспортных средств, преимущественно легковых автомобилей, а также иных грузов. Эвакуатор-автовоз содержит шасси (1) базового автомобиля, гидравлическую систему, загрузочную надстройку, состоящую из нижней (2) и верхней (3) платформ, гидроцилиндры подъема верхней (3) платформы, лебедку, расположенную на нижней платформе, переднюю стойку (4) в передней части нижней платформы, на которой размещены передние опорные точки верхней (3) платформы, выдвижные аппарели. Передние опорные точки верхней (3) платформы выполнены с двумя степенями свободы с обеспечением возможности приближения к нижней платформе. Полный подъем верхней (3) платформы обеспечен за счет возвратно-поступательного движения штоков гидроцилиндров, с возможностью фиксации верхней платформы в промежуточных положениях. Изобретение обеспечивает надежность и время загрузки, присущие одноместным эвакуаторам. 3 ил.
Эвакуатор-автовоз, содержащий шасси базового автомобиля, гидравлическую систему, загрузочную надстройку, состоящую из нижней и верхней платформ, гидроцилиндры подъема верхней платформы, лебедку, расположенную на нижней платформе, переднюю стойку в передней части нижней платформы, на которой размещены передние опорные точки верхней платформы, выдвижные аппарели, передние опорные точки верхней платформы выполнены с двумя степенями свободы с обеспечением возможности приближения к нижней платформе и удаления от неё, отличающийся тем, что полный подъём верхней платформы обеспечен за счёт возвратно-поступательного движения штоков гидроцилиндров, при этом предусмотрена возможность фиксации верхней платформы в промежуточных положениях.
| Способ изготовления резиновых бот | 1941 |
|
SU74867A1 |
| CN 205853969 U, 04.01.2017 | |||
| Логический элемент | 1961 |
|
SU149951A1 |
| US 6450742 B1, 17.09.2002. | |||

