Изобретение относится к области радиолокационных измерений и может быть использовано в импульсных радиолокаторах с коническим сканированием для классификации различных воздушных объектов.
Известны радиолокационный способ исследования вибрирующих объектов и устройство для его осуществления [1], основывающиеся на выделении периодических составляющих в отраженном сигнале при облучении близкорасположенных вибрирующих объектов. Представленное в [1] устройство содержит приемопередающую антенну, вход-выход которой через циркулятор подключен к входу демодулятора, а выход модулятора соединен с другим входом циркулятора, подключенный к выходу модулятора усилитель, выход которого связан одновременно с первым входом второго управляемого ключа, входом амплитудного детектора и первым входом первого управляемого ключа, выход которого соединен со входом анализатора спектра, а второй вход - одновременно с выходом компаратора и входом блока задержки, выход которого подключен к второму входу второго управляемого ключа, третий вход которого заземлен, а выход связан со вторым входом модулятора, первый (сигнальный) вход которого соединен одновременно с выходом генератора и гетеродинным входом демодулятора. При этом выход амплитудного детектора подключен к первому входу компаратора, второй вход которого связан с выходом порогового блока.
Данное устройство позволяет с высокой точностью определять вибрационные характеристики объектов пеленга по рассеянным радиолокационным сигналам. Поскольку различные объекты ввиду специфики своей формы имеют различные вибрационные характеристики, то предложенное устройство можно считать устройством, обеспечивающим классификацию различных вибрирующих объектов. Однако данное устройство не может быть применено для классификации таких объектов, как аэродинамические летательные аппараты (ЛА), вибрирующие при траекторных нестабильностях полета в турбулентной атмосфере, так как оно правильно функционирует только при локации близкорасположенных объектов, чтобы пренебрежение временем задержки рассеянного сигнала, используемое неоднократно, было оправданным.
В [2] приводится описание другого радиолокационного устройства классификации объектов по амплитудно-модулированным эхо-сигналам. Применение устройства основано на том, что отражающие поверхности ЛА при своем нормальном функционировании совершают колебательные движения, обусловленные работой двигателей. На эти колебания реагируют зондирующие импульсы радиолокационных станций (РЛС), и фаза рассеянных сигналов изменяется в соответствии с частотой колебаний исследуемого объекта. Устройство включает антенну, антенный переключатель (АП), приемник, передатчик, индикатор кругового обзора (ИКО) и канал классификации, состоящий из линии задержки (ЛЗ), второго ключа, смесителя, фильтра нижних частот (ФНЧ) и устройства воспроизведения образа объекта, причем передатчик состоит из модулятора, генератора сверхвысокой частоты (СВЧ) и первого ключа. В описанном устройстве антенна через АП соединяется со входом приемника и выходом первого ключа, второй вход которого связан одновременно с выходом генератора СВЧ и вторым входом смесителя, выход которого подключен к входу ФНЧ, а первый вход - к выходу второго ключа, первый вход которого соединен одновременно с выходом приемника и вторым входом ИКО, первый вход которого связан одновременно с выходом модулятора, первым (управляющим) входом первого ключа и входом ЛЗ, выход которой подключен ко второму (управляющему) входу второго ключа, а устройство воспроизведения образа объекта соединено с выходом ФНЧ.
Недостатком данного устройства является то, что оно не может обеспечить высокого качества классификации (разделения на классы) воздушных объектов, так как классификация проводится с помощью головных телефонов по окраске звука, которая зависит от амплитуды и частоты возникающих в полете вибраций. Отсутствие точных звуковых эталонов и различные слуховые и идентификационные возможности операторов РЛС, производящих классификацию, служат причинами возможных ошибок. Если в качестве признака отождествления применить не тембр звука, а распределение спектральных откликов по частотам вибрационного диапазона, то и в этом случае вероятность классификации не будет высокой, так как при этом не учитывается ракурс движения центра масс объекта и скорость его перемещения относительно локатора, от которых зависит структура частотного портрета вибрационного диапазона. К тому же в устройстве [2] производится не слежение за объектом, а только его стробирование по дальности, что может привести к попаданию в рабочую дистанцию сигналов, рассеянных несколькими объектами, и к увеличению ошибок классификации.
Известно также радиолокационное устройство классификации объектов [3], в состав которого входят последовательно включенные синхронизатор, модулятор, генератор СВЧ, АП, приемник, система измерения дальности (СИД) и счетно-решающий прибор (СРП), а также включающее антенну, систему управления антенной (СУА), первый аналого-цифровой преобразователь (АЦП), запоминающее устройство (ЗУ), систему измерения скорости (СИС), вычислитель быстрого преобразования Фурье (БПФ) и блок классификации, состоящий из микропроцессора, блока выбора эталонов и блока вывода результатов классификации. При этом выход синхронизатора связан со вторым входом СИД, первый вход которой подключен к входу СУА и входу первого АЦП, выход которого связан с первым входом запоминающего устройства, выход которого соединен со входом вычислителя БПФ, выход которого подключен к первому входу микропроцессора, выход которого соединен со входом блока вывода результатов классификации (БВРК), а второй вход - с выходом блока выбора эталонов, первый вход которого связан с выходом системы измерения скорости, а второй - с выходом счетно-решающего прибора, второй вход которого подключен ко второму выходу СУА, первый выход которой механически связан с антенной, вход-выход которой соединен с вход-выходом антенного переключателя, а второй выход приемника соединен со входом СИС.
Данное устройство имеет более высокую вероятность классификации воздушных объектов за счет учета дополнительных факторов при выборе эталонов отождествления вибрационного диапазона (эталонов вибрационных портретов, т.е. эталонов низкочастотных спектров отраженных сигналов в диапазоне распространения составляющих вибрационного эффекта, занимающем частотную полосу ±500 Гц относительно основной доплеровской составляющей). Однако и это устройство обладает существенными недостатками, снижающими эффективность его работы. Во-первых, при формировании спектра вибраций (вибрационного портрета) в качестве исходной информации используется только амплитудная огибающая отраженного сигнала, что приводит к симметрии портрета в области отрицательных и положительных частот относительно основной доплеровской составляющей отраженного сигнала. Однако в отличиях амплитуд в областях положительных и отрицательных частот составляющих вибрационного портрета (ВП) заключена важная информация, способствующая более эффективной классификации. Во-вторых, в используемом диапазоне частот кроме вибрационных составляющих присутствуют корпусные (для летательных аппаратов - планерные) составляющие, именуемые доплеровским портретом объекта [4], а также составляющие частот сканирования характеристики направленности антенны (ХНА). Эти составляющие, как правило, выше по амплитуде составляющих вибрационного эффекта [5], что при нормировании портрета приводит к снижению амплитуд вибрационных гармоник практически до уровня шума и боковых лепестков более мощных составляющих. Это обусловливает необходимость удаления из обработки составляющих планера ЛА и частот сканирования. И наконец, при рекомендуемых частотах повторения импульсов РЛС порядка единиц-десятков килогерц в диапазон используемого при классификации низкочастотного спектра проникают высокочастотные спектральные составляющие турбовинтового эффекта [6, 7], которые необходимо нейтрализовывать (устранять), чтобы не искажалась информация, заключенная в ВП [8].
Задачей изобретения является повышение качества классификации объектов локации по структуре вибрационного портрета за счет дополнительного учета фазовой информации отраженных сигналов, за счет исключения составляющих, обусловленных непосредственными отражениями от корпуса объекта и наличием частот сканирования, а также за счет устранения негативных ложных спектральных составляющих турбовинтового эффекта (ТВЭ).
Для достижения поставленной задачи предлагается дополнить схему устройства [3] четырьмя дополнительными блоками: вторым и третьим АЦП, блоком сглаживания, блоком ограничения и нормировки вибрационного портрета (БОНВП), предназначенным для вырезания из сформированного вибрационного портрета данных, представляющих доплеровский портрет летательного аппарата, а также гармоник, вызванных наличием конического сканирования характеристики направленности антенны. При этом БОНВП предлагается включить в состав блока классификации и связать его выход с первым входом микропроцессора, предназначенного для отождествления эталонов с рабочим вибрационным портретом летательного аппарата и принятия решения о его классе по наибольшей мере сходства. Вход БОНВП предлагается соединить с выходом вычислителя БПФ. Вход вычислителя БПФ предлагается связать с выходом блока сглаживания, вход которого следует подключить к выходу ЗУ, второй вход которого предлагается соединить с выходом второго АЦП, вход которого следует подключить ко второму выходу приемника. Вход третьего АЦП предлагается соединить с выходом СИС, а выход - с третьим входом ЗУ. Новые элементы схемы являются известными и представляют собой цифровые устройства на микропроцессорах и регистрах памяти, аналоги которых уже используются в прототипе [3].
Предложенное построение схемы радиолокационного устройства классификации вибрирующих ЛА позволяет существенно повысить качество определения их классов за счет дополнительного учета фазовой информации отраженных сигналов, за счет исключения составляющих, обусловленных непосредственными отражениями от корпуса объекта (планерных составляющих) и наличием частот сканирования, за счет устранения негативных спектральных составляющих ТВЭ, за счет получения несимметричного ВП объекта в цифровом виде и более тщательного сравнения его с набором аналогичных по структуре эталонов.
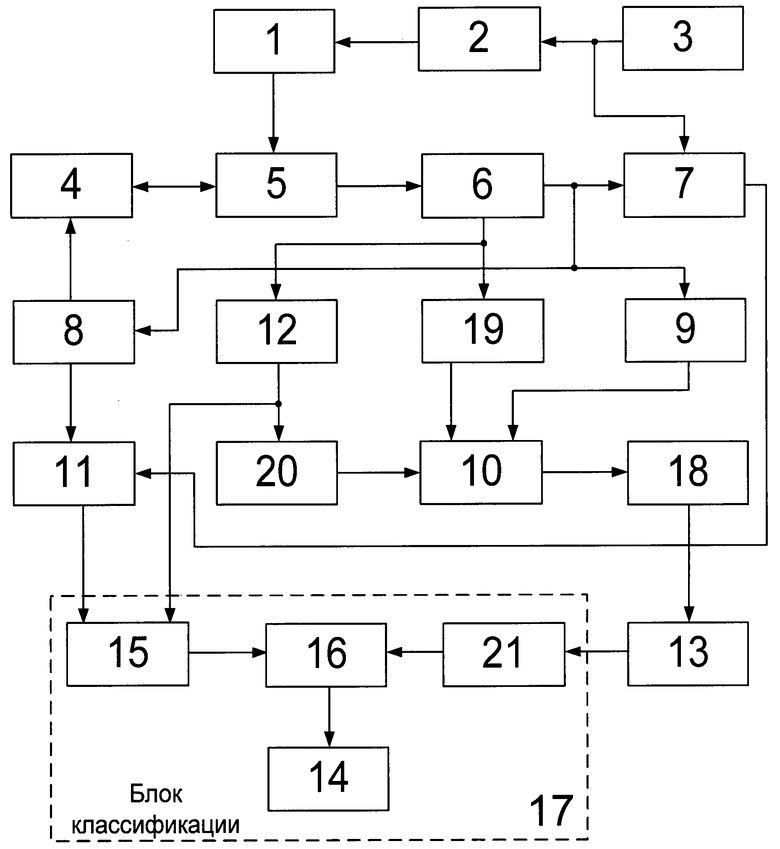
На чертеже представлена структурная схема радиолокационного устройства классификации вибрирующих ЛА с траекторными нестабильностями полета в приземных слоях атмосферы. Радиолокационное устройство классификации содержит генератор СВЧ 1, модулятор 2, синхронизатор 3, антенну 4, АП 5, приемник 6, СИД 7, СУА 8, 1-й АЦП 9, ЗУ 10, СРП 11 (который предназначен для расчета пространственного ракурса локации летательного аппарата), СИС 12, вычислитель БПФ 13, блок сглаживания 18, 2-й АЦП 19, третий АЦП 20, а также блок классификации 17, состоящий из блока вывода результатов классификации 14, блока выбора эталонов 15, микропроцессора 16 и БОПВП 21. В отличие от прототипа [3] в предлагаемом устройстве вход второго АЦП 19 соединен со вторым выходом приемника 6, а выход - со вторым входом ЗУ 10, третий вход которого подключен к выходу третьего АЦП 20, вход которого связан с выходом СИС 12, выход ЗУ 10 подключен к входу блока сглаживания 18, выход которого соединен со входом вычислителя БПФ 13, связанного своим выходом со входом БОНВП 21, выход которого подключен к первому входу микропроцессора 16, предназначенного для отождествления эталонов с рабочим вибрационным портретом летательного аппарата и принятия решения о его классе по наибольшей мере сходства. В данном радиолокационном устройстве счетно-решающий прибор предназначен для расчета пространственного ракурса локации летательного аппарата. При этом предполагается, что первый выход приемника является выходом его амплитудного детектора, а второй выход приемника является выходом его фазового детектора.
Радиолокационное устройство классификации вибрирующих ЛА с траекторными нестабильностями (ТН) полета в приземных слоях атмосферы в соответствии со своей внутренней структурой работает следующим образом.
Генератор СВЧ 1 формирует мощные импульсы СВЧ в моменты подачи на его вход модулирующих импульсов с выхода модулятора 2, работой которого управляет синхронизатор 3. Зондирующие импульсы СВЧ через АП 5 поступают в антенну 4 и излучаются ею в направлении объекта, выбранного для сопровождения и последующей классификации. Отраженные воздушным объектом (летательным аппаратом) электромагнитные волны улавливаются антенной 4 и через АП 5 передаются на вход приемника 6, включающего в свой состав преобразователи частоты, частотные фильтры, усилители, амплитудный и фазовый детекторы. Продетектированные сигналы с выхода амплитудного детектора приемника 6 подаются на входы СУА 8, первого АЦП 9 и первый вход СИД 7. Выход амплитудного детектора является первым выходом приемника 6. В СИД 7 производится измерение дальности до сопровождаемого объекта по времени задержки отраженного сигнала относительно импульсов синхронизации, поступающих на второй вход СИД 7 с выхода синхронизатора 3. В СУА 8 производится измерение угловых координат объекта (угол места ε и азимут β). Для этого в РЛС должен быть реализован метод конического сканирования, т.е. конического развертывания ХНА при вращении облучателя, смещенного из фокуса параболического зеркала.
Информация об угловом положении объекта заключена в огибающей амплитуд принятых сигналов и может быть однозначно считана за период сканирования. Для осуществления этого в СУА 8 производится выделение огибающей видеоимпульсов, поступающих на вход СУА с первого выхода приемника 6. По параметрам огибающей определяются сигналы ошибок по ε и β, управляющие приводами СУА 8, которые обеспечивают механический доворот антенны 4 в направлении на объект. Для этого служит механическая связь первого выхода СУА 8 со входом антенны 4. Со второго выхода СУА 8 сигналы, пропорциональные угловому положению сопровождаемого ЛА, поступают на второй вход счетно-решающего прибора 11, предназначенного для расчета пространственного ракурса локации летательного аппарата. На первый вход СРП 11 приходят сигналы дальности до объекта с выхода СИД 7. СРП 11 по изменению угловых координат (ε и β) и дальности R до объекта рассчитывает пространственный ракурс локации объекта (ЛА) γ, который в виде напряжения поступает с выхода СРП 11 на второй вход блока выбора эталонов 15, входящего в состав блока классификации 17.
На первый вход блока выбора эталонов 15 подается сигнал, пропорциональный радиальной скорости объекта Vr из СИС 12, на вход которой поступают сигналы со второго выхода (с фазового детектора) приемника 6. Видеоимпульсы с первого выхода приемника 6 последовательно поступают на вход первого АЦП 9, преобразующего их амплитуду в цифровые данные, которые проходят на первый вход запоминающего устройства 10.
Второй АЦП 19 последовательно оцифровывает фазовую информацию, заключенную в отраженных сигналах, и передает ее цифровые значения (с выхода АЦП 19) на второй вход ЗУ 10. Для однозначного съема амплитудной и фазовой информации в каждом периоде зондирования проводится согласованная обработка отраженного объектом сигнала. При согласованной обработке в качестве опорной функции используется комплексно-сопряженный зондирующий сигнал, принадлежащий периоду приема отраженного сигнала. В результате для каждого периода зондирования формируется принятый локатором обработанный сигнал квазитреугольной формы, т.е. сигнал с пиковым амплитудным значением [9]. Момент формирования пика отклика отраженного сигнала следует использовать для считывания амплитудной и фазовой информации с выходов приемника 6.
Запоминающее устройство 10 предназначено для вычитания из поступающих на него данных фазовой информации, связанной с изменением дальности до объекта, а также для формирования и запоминания массивов квадратурных составляющих отраженных сигналов, т.е. для преобразования и хранения цифровой информации об отраженных сигналах. В момент поступления амплитуды и фазы i-го отраженного сигнала с выходов 1-го и 2-го АЦП в ЗУ 10 на основе этой информации формируется комплексный сигнал вида  , где Ai - амплитуда i-го отраженного сигнала; ψi - фаза этого же сигнала.
, где Ai - амплитуда i-го отраженного сигнала; ψi - фаза этого же сигнала.
Фазовая информация низкочастотного ВП не должна искажаться фазовой информацией, связанной с изменением дальности до объекта. Для этого с выхода СИС 12 значение измеренной радиальной скорости Vr поступает на вход третьего АЦП 20, где преобразуется в цифровой код. Величина радиальной скорости ЛА извлекается из частоты амплитудной модуляции Fам сигналов, снимаемых с выхода фазового детектора блока 6, путем умножения этой частоты на длину волны λ и деления результата на 2. Цифровое значение радиальной скорости объекта Vr поступает с выхода 3-го АЦП 20 на третий вход ЗУ 10. В ЗУ 10 перед запоминанием данных производится вычитание фазовой информации, связанной с изменением дальности до объекта. А именно, при приеме и обработке i-го отраженного сигнала результирующая фаза вычисляется с помощью формулы ψрез i=ψi-4iVrTиπ/λ, где Ти - период повторения импульсов РЛС. Подобная операция является известной и широко применяется при формировании доплеровских портретов (ДП) и радиолокационных изображений объектов [6, 8, 10]. В итоге в каждом i-м периоде зондирования в ЗУ 10 формируется комплексный отраженный сигнал вида  , который затем преобразуется в два квадратурных сигнала Rei=Aicosψрез i и Imi=Aisinψрез i.
, который затем преобразуется в два квадратурных сигнала Rei=Aicosψрез i и Imi=Aisinψрез i.
Цифровые данные о синусной и косинусной квадратурных составляющих i-x отраженных сигналов последовательно заполняют ячейки (элементы) массивов квадратурных составляющих, формируемых в ЗУ 10. Каждый массив имеет (2N+Z-1), где N - натуральное число в диапазоне от 7 до 11, Z - число элементов частной выборки массива, используемой в блоке 18 для нахождения среднего при сглаживании.
Итак, цифровые данные для каждой квадратуры отдельно записываются в ячейки памяти запоминающего устройства 10 до тех пор, пока их количество не составит величину (2N+Z-1). Сформированные массивы квадратурных составляющих отраженных сигналов поступают с выхода ЗУ 10 в блок сглаживания 18. Данный блок известными из [11, 12] методами сглаживания формирует модифицированные массивы квадратурных составляющих отраженных сигналов. Один из наиболее простых способов сглаживания описан в [12]. Результирующие квадратурные массивы будут содержать данные только о низкочастотных огибающих, а все высокочастотные выбросы, обусловленные ТВЭ, будут устранены. При сглаживании заменой среднего [12] число элементов массива снижается на Z-1. Значит, в сглаженных квадратурных массивах останется по 2N элементов. Такое количество одновременно обрабатываемых данных необходимо для обеспечения работы вычислителя БПФ 13. При этом необходимо обеспечить также правильную дискретизацию обрабатываемого отраженного сигнала, чтобы не потерять полезную информацию и выделить детально анализируемую спектральную полосу вибрационного диапазона.
Для обоснования границ данного диапазона отметим, что на современных самолетах и вертолетах различают следующие виды вибраций [5, 13, 14, 15]:
а) вибрации, возникающие при работе силовых установок (двигательные вибрации, в том числе и вибрации от воздушных винтов);
б) аэродинамические вибрации, связанные с особенностями обтекания воздушным потоком конструкции объекта или его отдельных частей;
в) акустические вибрации;
г) колебания типа «флаттер».
В общем случае режим вибраций конструкции объектов, представляющий собой сумму вынужденных и собственных колебаний, определяется как интенсивностью и частотным спектром случайных внешних факторов, так и значениями соответствующих передаточных функций. Величины последних зависят от спектра собственных частот конструкции в целом, ее частей и элементов, а также коэффициентов демпфирования. Если коэффициенты демпфирования сравнительно невелики, что выполняется для всех современных ЛА [13], то передаточные функции будут иметь большие коэффициенты усиления на всех частотах, совпадающих с собственными, т.е. спектр вибраций реального планера будет в основном узкополосным и зависящим от конструктивных особенностей объекта.
Исследования, посвященные анализу работы двигательных установок летательных аппаратов [14, 16], показывают, что наибольшими по амплитуде смещения являются вибрации на частотах:
для поршневых двигателей - Ωкв, 2Ωкв, Ωв, NлΩв, где Ωкв - угловая скорость вращения коленчатого вала, Ωв - угловая скорость вращения винта, Nл - количество лопастей винта;
для турбовинтовых двигателей - Ωв, NлΩв, Ωр, где Ωp - угловая скорость вращения ротора;
для турбореактивных двигателей - Ωp1, где Ωp1 - угловая скорость вращения i-го ротора (данные вибрации, согласно [17, 18], занимают диапазон от 56 до 300 Гц, а в некоторых случаях и более);
для вертолетов Ωнв, KнвΩнв, где Kнв - количество лопастей несущего винта, Ωнв - угловая скорость вращения несущего винта (данные вибрации порождают спектральные отклики на частотах от 2 до 14 Гц [13]).
Исследования, посвященные аэродинамике полета воздушных объектов [5, 13, 15], показывают, что преобладающие по амплитуде аэродинамические колебания всегда очень близки или совпадают с частотами собственных колебаний конструкции планера. Наибольшими по амплитуде из этих колебаний являются колебания, соответствующие низшим тонам собственных колебаний. При аэродинамических колебаниях конструкция ЛА как бы является своеобразным фильтром, выделяющим только такие колебания, частоты которых находятся в зоне резонанса с его собственной частотой. Поэтому, зная собственные частоты вибрации элементов конструкции, можно предсказать, на каких частотах вибрации будут максимальными по амплитуде. Акустические вибрации также имеют частоты, близкие к собственным частотам элементов конструкции, и занимают спектральный диапазон от 1,5 до 40 Гц [13, 15].
Таким образом, для классификации воздушных объектов по спектру вибраций необходимо анализировать полосу частот в диапазоне ±500 Гц. Из этого следует, что частота дискретизации Fд, согласно теореме Котельиикова, должна составлять величину порядка 1000 Гц. Из практических соображений следует выбрать величину Fд несколько большей (например 1,5 кГц). Современные импульсно-доплеровские РЛС имеют частоты повторения Fи до десятков и даже сотен килогерц. Значит, можно обеспечить требуемую дискретизацию отраженных сигналов, преобразовывая в АЦП каждый k-й (k=Fи/Fд) видеоимпульс в цифровое значение.
Оцифрованные значения 2N (например, 2048) отсчетов квадратурных составляющих видеосигналов образуют двумерный (комплексный) массив данных, который поступает с выхода блока сглаживания 18 на вход вычислителя БПФ 13. Блок 13 проводит с данными массивов операцию БПФ и формирует на своем выходе массив данных, представляющих распределение интенсивностей принятых отраженных сигналов по частотам вибрационного диапазона (-500…+500 Гц). Графическое представление модульных величин элементов такого массива принято называть спектральным портретом объекта в вибрационном диапазоне или вибрационным портретом объекта. Полученный массив с выхода вычислителя БПФ 13 поступает на вход блока ограничения и нормировки вибрационного портрета 21.
Блок 21 предназначен для вырезания из сформированного вибрационного портрета данных, представляющих доплеровский портрет ЛА, а также гармоник, вызванных наличием конического сканирования ХНА. Многочисленными экспериментами установлено, что низкочастотный ДП ЛА распределен в диапазоне ±100 Гц в зависимости от ракурса полета, интенсивности ТН и скорости изменения углового положения ЛА относительно РЛС [6, 8, 9, 19]. В большинстве же случаев ширина ДП не превышает 30-40 Гц. Частоты сканирования ХНА в современных РЛС составляют от 30 до сотен Гц. В [20, с.421, рис.17] частота сканирования ХНА, выявленная по экспериментальному низкочастотному спектру, составляет 37 Гц. Для каждой РЛС частота сканирования ХНА Fск является известной. Для того чтобы составляющие модуляции сканирования не влияли на качество классификации по ВП, в блоке 21 на первом этапе из массива вибрационного портрета удаляются отсчеты, представляющие амплитуды сигнала в диапазоне частот ±(Fск+Δ), где Δ - половина ширины спектральных выбросов на частотах Fск. Если частота Fск мала (до 100 Гц) и не превышает частотной протяженности ДП ЛА, то удалению подлежат отсчеты в диапазоне частот ±100 Гц.
На втором этапе в БОНВП 21 оставшиеся амплитуды составляющих ВП нормируются относительно максимальной. При нормировке используются модули комплексных амплитуд спектра. После ограничения (удаления неинформативных отсчетов) и нормировки модифицированный массив данных, выражающий собой признак отождествления в виде «урезанного» вибрационного портрета, поступает с выхода БОНВП 21 на вход микропроцессора 16, предназначенного для отождествления эталонов с рабочим вибрационным портретом летательного аппарата и принятия решения о его классе по наибольше мере сходства. В блоке 16 массив данных ВП сравнивается с аналогичными эталонными массивами (эталонными «урезанными» вибрационными портретами), поступающими на второй вход микропроцессора 16 с выхода блока выбора эталонов 15.
Блок выбора эталонов 15 в соответствии с поступающими на его входы сигналами пространственного ракурса локации γ и радиальной скорости объекта Vr среди всего банка эталонных массивов ВП выбирает только ту группу эталонных массивов, которая отвечает измеренному значению угла γ и линейной скорости полета объекта V=Vr/cosγ. В выбранной группе количество эталонов определяется структурой заранее заданного алфавита классификации. Поступая на второй вход блока 16, эталонные массивы данных отождествляются с рабочим ВП из блока 21 и по наибольшей мере сходства принимается решение в пользу какого-либо класса объектов. Сигнал, пропорциональный номеру выбранного класса, поступает с выхода микропроцессора 16 на вход БВРК 14, который индицирует внешний облик или название класса (типа) воздушного объекта, в пользу которого проводилась и закончена классификация.
Положительный технический эффект заключается в том, что при классификации по ВП используются только те его составляющие, природа и физическая сущность которых обусловлена проявлением только вибрационного эффекта. За счет нормировки амплитуды составляющих ВП становятся ярко выраженными, что способствует более достоверной классификации. Остальные же составляющие, принадлежащие доплеровскому портрету, гармоникам процесса сканирования ХНА и турбовинтовым составляющим, из обработки исключаются, что и приводит к улучшению качества классификации объектов.
Источники информации
1. А.С. СССР №1561703. МПК6 G01S 13/02. Приоритет 12.07.88 г. (аналог).
2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984. С.36-37, ис.2.2 (аналог).
3. Патент РФ №2095824. МПК6 G01S 13/02. Радиолокационное распознающее устройство. Заявка 96100426. Приоритет 09.01.96. Опубл. 10.11.97 г. Бюл. №31 (прототип).
4. Митрофанов Д.Г. Синтез радиолокационного изображения цели методом математического моделирования ее доплеровских портретов. Киев: Радиоэлектроника. Изв. вузов, 1994. №3. С.72-16.
5. Лавров Б.А., Мостовой А.С. Вибрации частей самолетов и вертолетов. Куйбышев: Высшая школа, 1976. - 41 с.
6. Радиоэлектронные системы. Справочник. Основы построения и теория. /Под ред. Я.Д. Ширмана. М.: Радиотехника. 2007. - 510 с.
7. Shirman Y.D. Computer simulation of aerial target radar scattering recognition, detection, and tracking. Norwood. Boston-London. Artech House, 2002. 296 p.
8. Митрофанов Д.Г., Прохоркин А.Г. Методы компенсации влияния составляющих турбинного эффекта при построении изображений воздушных целей. // Радиотехника, 2006. №9. с.32-37.
9. Митрофанов Д.Г. Экспериментальные исследования параметров траекторных нестабильностей полета воздушных объектов. Сборник докладов XV международной конференции "Радиолокация, навигация и связь RLNG-2009". Воронеж: НПФ "САКВОЕЕ" 000, 2009. С.1536-1547.
10. Митрофанов Д.Г. Комплексный адаптивный метод построения радиолокационных изображений в системах управления двойного назначения. // Теория и системы управления. Известия РАН, 2006. №1. С.101-118.
11. Кирьянов Д.В. Mathcad 12. СПб.: БХВ-Петербург. 2005. - 576 с.
12. Патент №2348053. МПК6 G01S 13/02. Способ распознавания ложных воздушных целей. Митрофанов Д.Г., Бортовик В.В., Сафонов А.В. и др. Заявка №2007138527. Приоритет 16.10.2007. Опубл. 27.02.2009.
13. Гудков А.И., Лешаков П.С. Внешние нагрузки и прочность летательных аппаратов. М.: Машиностроение, 1968. - 470 с.
14. Сидоренко М.К. Виброметрия газотурбинных двигателей. М.: Машиностроение, 1973. - 224 с.
15. Гладкий В.Ф. Прочность, вибрация и надежность конструкции летательного аппарата. М.: Наука, 1975. - 456 с.
16. Сиротин К.Н., Коровкин Ю.М. Техническая диагностика авиационных газотурбинных двигателей. М.: Машиностроение, 1979. - 272 с.
17. Иностранные авиационные газотурбинные двигатели (по данным иностранной печати). /Под ред. Г.В. Скворцова. ЦИАМ. 1978. - 324 с.
18. Jane's all the worlps aircraft. 1983-84. London - 905 p.
19. Митрофанов Д.Г., Прохоркин А.Г., Нефедов С.И. Измерение габаритов летательных аппаратов в условиях турбулентности на основе инверсного синтезирования апертуры. // Измерительная техника, 2008. №8. С.24-28.
20. Справочник по радиолокации. /Под ред. М.И. Сколника. Пер. с англ. М.: Сов. радио, 1967. Т.1. Основы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНОГО РАДИОЛОКАЦИОННОГО ОБЪЕКТА НАБЛЮДЕНИЯ С ВЫБОРОМ ИНТЕРВАЛА МАКСИМИЗАЦИИ УГЛОВОЙ СКОРОСТИ ЕГО ПОВОРОТА ПРИ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЯХ ДВИЖЕНИЯ | 2010 |
|
RU2427001C1 |
| МНОГОЧАСТОТНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ РАСПОЗНАВАНИЕМ ЦЕЛЕЙ | 2007 |
|
RU2358288C1 |
| СПОСОБ ВНЕШНЕГО РАДИОЛОКАЦИОННОГО ВЫЯВЛЕНИЯ ФАКТА НАЛИЧИЯ ТРАЕКТОРНЫХ НЕСТАБИЛЬНОСТЕЙ ПОЛЕТА ВОЗДУШНОГО ОБЪЕКТА С МАЛЫМ КУРСОВЫМ УГЛОМ ПЕРЕМЕЩЕНИЯ | 2009 |
|
RU2410717C2 |
| УСТРОЙСТВО КЛАССИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ДВИЖЕНИЯ | 2009 |
|
RU2416106C2 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПЕРЕСТРОЙКОЙ ЧАСТОТЫ, ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ И ДВУХУРОВНЕВЫМ НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ ПО СОВОКУПНОСТИ ПРИЗНАКОВ | 2009 |
|
RU2412451C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С АДАПТИВНЫМ ВЫБОРОМ МОМЕНТА АНАЛИЗА ОТРАЖЕННОГО СИГНАЛА | 2008 |
|
RU2377596C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ОБНАРУЖЕНИЯ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2024 |
|
RU2833132C1 |
Изобретение относится к области радиолокационных измерений и может быть использовано в импульсных радиолокаторах с коническим сканированием для классификации различных объектов. Достигаемым техническим результатом изобретения является повышение качества классификации объектов локации по структуре вибрационного портрета за счет дополнительного учета фазовой информации отраженных сигналов, за счет исключения составляющих, обусловленных непосредственными отражениями от корпуса объекта и наличием частот сканирования, а также за счет устранения негативных спектральных составляющих турбовинтового эффекта. При этом заявленное устройство содержит синхронизатор, модулятор, генератор сверхвысокой частоты, антенный переключатель, приемник, систему измерения дальности, счетно-решающий прибор, антенну, систему управления антенной, систему измерения скорости, три аналого-цифровых преобразователя, запоминающее устройство, вычислитель быстрого преобразования Фурье, блок классификации, определенным образом выполненные и определенным образом соединенные между собой. 1 ил.
Радиолокационное устройство классификации вибрирующих летательных аппаратов с траекторными нестабильностями полета в приземных слоях атмосферы, включающее в свой состав последовательно соединенные синхронизатор, модулятор, генератор сверхвысокой частоты, антенный переключатель, приемник, первый выход которого, являющийся выходом амплитудного детектора, соединен с системой измерения дальности, выход которой соединен с первым входом счетно-решающего прибора, предназначенного для расчета пространственного ракурса локации летательного аппарата, а также включающее антенну, систему управления антенной, систему измерения скорости, первый аналого-цифровой преобразователь, запоминающее устройство, вычислитель быстрого преобразования Фурье, блок классификации, состоящий из блока выбора эталонов, микропроцессора, предназначенного для отождествления эталонов с рабочим вибрационным портретом летательного аппарата и принятия решения о его классе по наибольшей мере сходства, а также блока вывода результатов классификации, причем вход-выход антенного переключателя соединен с входом-выходом антенны, вход которой механически связан с первым выходом системы управления антенной, второй выход которой связан со вторым входом счетно-решающего прибора, выход которого подключен ко второму входу блока выбора эталонов, первый вход которого соединен с выходом системы измерения скорости, вход которой связан со вторым выходом приемника, являющимся выходом фазового детектора, при этом первый выход приемника также связан с входом системы управления антенной и входом первого аналого-цифрового преобразователя, выход которого связан с первым входом запоминающего устройства, выход синхронизатора подключен также ко второму входу системы измерения дальности, выход блока выбора эталонов соединен со вторым входом микропроцессора, выход которого связан со входом блока вывода результатов классификации, отличающееся тем, что в состав устройства дополнительно включены второй и третий аналого-цифровые преобразователи, блок сглаживания, блок ограничения и нормировки вибрационного портрета, структурно входящий в состав блока классификации, причем блок ограничения и нормировки вибрационного портрета предназначен для вырезания из сформированного вибрационного портрета данных, представляющих доплеровский портрет летательного аппарата, а также гармоник, вызванных наличием конического сканирования характеристики направленности антенны, при этом вход второго аналого-цифрового преобразователя связывают с вторым выходом приемника, а выход - с вторым входом запоминающего устройства, третий вход которого подключают к выходу третьего аналого-цифрового преобразователя, вход которого соединяют с выходом системы измерения скорости, выход запоминающего устройства подключают к входу блока сглаживания, выход которого связывают с входом вычислителя быстрого преобразования Фурье, выход которого подключают к входу блока ограничения и нормировки вибрационного портрета, выход которого соединяют с первым входом микропроцессора, при этом запоминающее устройство предназначено для вычитания из поступающих на него данных фазовой информации, связанной с изменением дальности до объекта, а также для формирования и запоминания массивов квадратурных составляющих отраженных сигналов.
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ СОСТАВА ЦЕЛИ | 1996 |
|
RU2095827C1 |
| УСТРОЙСТВО РАСПОЗНАВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 1995 |
|
RU2099735C1 |
| Магнитная головка для записи и воспроизведения звука магнитным способом | 1949 |
|
SU81807A1 |
| DE 10357470 A1, 15.07.2004 | |||
| СПОСОБ РАЗРАБОТКИ ПОЛОГОГО И НАКЛОННОГО УГОЛЬНОГО ПЛАСТА | 1991 |
|
RU2023158C1 |
| СПОСОБ ПРОКАТКИ ШЕСТИГРАННОЙ СТАЛИ | 2000 |
|
RU2184627C2 |
| US 6680691 В2, 20.01.2004. | |||

