Изобретение относится к трубопроводному транспорту, а именно, к эксплуатации магистральных трубопроводов, и предназначено для отслеживания местоположения очистных и диагностических устройств (далее - ОУ) в трубопроводе в режиме реального времени.
На данный момент для отслеживания ОУ при очистке и диагностике трубопровода перед вводом в эксплуатацию назначается бригада для сопровождения ОУ вдоль трубопровода. Непосредственно на само ОУ устанавливается средство отслеживания (трансмиттер). В следствии остатков в полости льда и шуги после гидроиспытаний, а также замятий стенок трубопровода после строительно-монтажных работ возникают трудности прохождения ОУ. Установленное на ОУ средство отслеживания нередко выходит из строя (в частности, при попытке его продавливания в трубопроводе). При таком методе усложняются поиски местоположения ОУ в случае его застревания в трубопроводе.
Известно устройство для определения местонахождения очистных и диагностических снарядов в трубопроводе, включающее передатчик, монтируемый на снаряде, и приемник с антенной для приема сигналов передатчика, располагаемый над трубопроводом. Передатчик излучает сигналы в диапазоне частот 7-11 Гц и со скважностью, которая устанавливается в зависимости от скорости движения снаряда. Передатчик содержит герметичный контейнер, в котором размещены автономный источник питания, соединенный через электронный ключ, управляемый блоком контроля напряжения питания, с модулятором, выход которого соединен с генератором, при этом выход последнего соединен с излучающей антенной. Каркас излучающей антенны выполнен в виде цилиндра со щечками из немагнитного материала. Передатчик снабжен блоком временной задержки передачи сигналов, управляющим совместно с блоком контроля напряжения питания электронным ключом, включающим питание время-импульсного модулятора и генератора. Причем выход время-импульсного модулятора подключен к генератору, а выход генератора подключен к излучающей антенне. Приемник сигнала передатчика содержит дешифратор, вход которого соединен с выходом усилителя-преобразователя, а выход - с устройством контроля и индикации (RU 2110729 С1, опубликованный 10.05.1998).
При использовании упомянутого известного устройства необходима установка на ОУ передатчика для генерирования электромагнитных сигналов и передачи их через стенку трубопровода и грунт для определения местоположения ОУ внутри трубопровода с помощью приемника, что делает зависимым процесс отслеживания от источника питания передатчика, кроме того высокая вероятность выхода из строя передатчика и приемника при эксплуатации.
Техническая проблема, на решение которой направлено заявляемое изобретение, заключается в создании технического решения, обеспечивающего отслеживание ОУ в режиме реального времени при непрерывном контроле движения ОУ на протяжении трубопровода без использования дополнительных устройств (передатчика для скребка, датчика прохождения очистного устройства), которые могут выходить из строя при эксплуатации.
Технический результат, достигаемый при реализации заявляемого изобретения, заключается в повышении надежности определения местонахождения ОУ в трубопроводе за счет исключения установки на ОУ средств, имеющих высокую вероятность выхода из строя.
Заявляемый технический результат достигается тем, что устройство для определения местонахождения очистного устройства в трубопроводе, содержит микрокомпьютер, блок питания и модуль связи для соединения микрокомпьютера с компьютером оператора, на который выводится информация о местонахождении очистного устройства в трубопроводе, при этом микрокомпьютер через аналого-цифровые преобразователи соединен с датчиками давления и расхода, устанавливаемыми на трубопроводе и выполнен с возможностью вычисления расстояния, пройденное очистным устройством в трубопроводе в соответствии с формулой:
L=ν*f,
где t - время движения очистного устройства в часах;
ν - скорость движения очистного устройства, м/ч;
ν=Q/(S+S×i+P/100),
Q - расход жидкости в трубопроводе, м3/ч;
Р - давление в трубопроводе, кгс/см2;
S - площадь поперечного сечения трубопровода, которая вычисляется по формуле S=πd2/4, м2,
где d внутренний диаметр трубопровода;
i - коэффициент пропуска жидкости через очистного устройства, который определяется из эмпирического выражения:
i=Q×e/100,
где е - экспериментальное значение, которое равно 5.
Развитием и уточнением предлагаемого изобретения являются следующие признаки:
- содержит аккумуляторную батарею;
- микрокомпьютер выполнен с возможностью вычисления расстояния очистного устройства с учетом наклона трубопровода, пройденное очистным устройством в трубопроводе в соответствии с формулой:
L=ν×t,
где t - время движения очистного устройства в часах;
ν - скорость движения очистного устройства, м/ч;
ν=Q/(S+S×i+P/100+τ),
где τ - коэффициент наклона трубопровода, определяемый по формуле:
τ=α/(100+α/2),
где α - угол наклона трубопровода;
Q - расход жидкости в трубопроводе, м3/ч;
Р - давление в трубопроводе, кгс/см2;
S - площадь поперечного сечения трубопровода, которая вычисляется по формуле S=πd2/4, м2,
где d внутренний диаметр трубопровода;
i - коэффициент пропуска жидкости через очистного устройства, который определяется из эмпирического выражения:
i=Q×e/100,
где е - экспериментальное значение, которое равно 5.
Наличие в устройстве датчиков давления и расхода позволяет получить информацию о давлении и расходе жидкости в трубопроводе. Используя указанные параметры микрокомпьютер вычисляет данные о местонахождении ОУ в трубопроводе.
В частности, в микрокомпьютер может быть заложен алгоритм, основанный на следующей экспериментально полученной формуле: ν=Q/(S+S×i+Р/100), где
ν - скорость движения очистного устройства, м/ч;
Q - расход жидкости в трубопроводе, м3/ч;
Р - давление в трубопроводе, кгс/см2;
S - площадь поперечного сечения трубопровода, которая вычисляется по формуле S=πd2/4, м2, где d внутренний диаметр трубопровода;
i - коэффициент пропуска жидкости через очистного устройства, который определяется из эмпирического выражения:
i=Q×e/100,
где е - экспериментальное значение, которое равно 5.
В микрокомпьютер может быть также заложен алгоритм, основанный на следующей экспериментально полученной формуле, учитывающей наклон трубопровода:
ν=Q/(S+S×i+P/100+τ), где
τ - коэффициент наклона трубопровода, определяемый по формуле:
τ=α/(100+α/2), где α - угол наклона трубопровода.
Расстояние, пройденное очистным устройством, вычисляется по формуле:
L=ν×t, где t - время движения очистного устройства в часах.
На основании указанных выше формул, микрокомпьютер вычисляет местоположение очистного устройства каждые 0,5 секунды, закладывая вычисленные значения в энергонезависимую память.
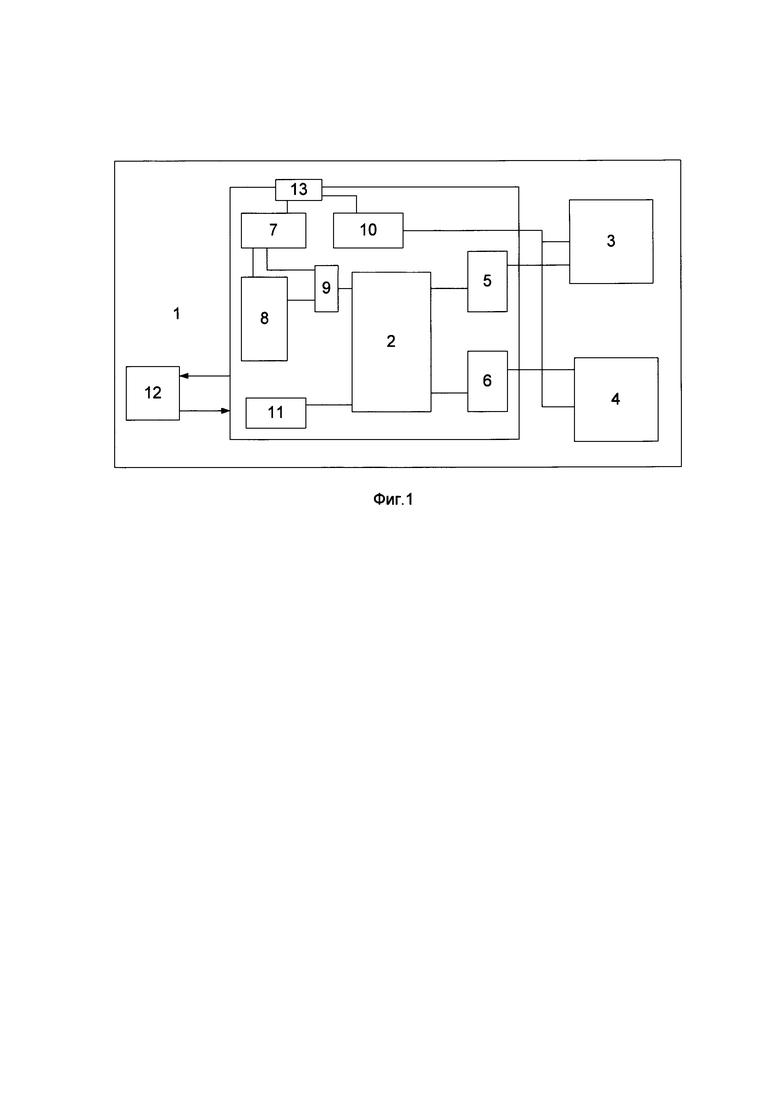
Сущность изобретения поясняется с помощью графических материалов, где на фиг.1 изображена схема предлагаемого устройства.
Устройство для определения местонахождения очистного устройства в трубопроводе содержит корпус 1, включающий микрокомпьютер 2, блок питания 7 и модуль связи 11 для соединения микрокомпьютера 2 с компьютером 12 оператора, на который выводится информация о местонахождении ОУ в трубопроводе. При этом микрокомпьютер 2 через аналого-цифровые преобразователи 5 и 6 соединен с датчиками давления 3 и расхода 4, устанавливаемые на трубопроводе.
Устройство может быть снабжено аккумуляторной батареей 8, соединенной с блоком питания 7 и через коммутатор 9 с микрокомпьютером 2.
Датчики 3 и 4 также могут быть снабжены блоком питания 10, который, также, как и блок питания 7 микрокомпьютера 2, может быть подключен к сети 220 В через клемную колодку 13.
Устройство работает следующим образом.
На начальном пункте трубопровода устанавливаются датчики давления 3 и расхода 4. В непосредственной близости устанавливается устройство (место установки не нормируется). Устройство подключается через клемную колодку 13 к сети 220 В. Далее устанавливается соединение с компьютером 12 оператора через модуль связи 11. После установки соединения устройства с компьютером 12 оператора, оператор заносит информацию о параметрах пропускной способности ОУ через себя жидкости, параметры рельефные трубопровода по высотным точкам, диаметр и толщину стенок трубопровода для корректной работы расходомера.
До момента запуска ОУ устройство находится в режиме ожидания, то есть во время заполнения КПП СОД средой никакие расчеты не производит. В это время проводятся работы по проверке связи устройства с датчиками 3 и 4 с компьютером 12 оператора. После открытия соответствующей задвижки для запуска ОУ, с помощью компьютера 12 оператор запускает процесс расчета. С момента запуска ОУ до момента приема ОУ микрокомпьютер 2 обрабатывает информацию, заложенную оператором и полученную от датчиков 3 и 4 и вычисляет местоположение ОУ непрерывно с частотой обновления каждые 0,5 секунд.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК БЕЗРАЗМЕРНЫХ ПАРАМЕТРОВ ТЕЧЕНИЯ ПОТОКОВ РАБОЧЕЙ ЖИДКОСТИ В ДРОССЕЛЬНЫХ ОКНАХ ЗОЛОТНИКОВЫХ ГИДРОРАСПРЕДЕЛИТЕЛЕЙ | 2004 |
|
RU2282065C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАССТОЯНИЯ, ПРОЙДЕННОГО ВНУТРИТРУБНЫМ СНАРЯДОМ-ДЕФЕКТОСКОПОМ С ОДОМЕТРАМИ | 2006 |
|
RU2316782C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С ОДОМЕТРАМИ | 2005 |
|
RU2306479C2 |
| СКАНИРУЮЩИЙ ДЕФЕКТОСКОП | 2009 |
|
RU2402760C1 |
| ВИХРЕВОЙ СПОСОБ ИЗМЕРЕНИЯ ОБЪЕМА ПРОТЕКШЕГО ВЕЩЕСТВА | 2011 |
|
RU2478916C2 |
| СИСТЕМА ОЧИСТКИ И ЭЛЕКТРОМАГНИТНОЙ ДИАГНОСТИКИ ТЕХСОСТОЯНИЯ СТАЛЬНЫХ ТРУБОПРОВОДОВ | 2018 |
|
RU2694466C1 |
| Роботизированный мишенный комплекс для тренировки тактики боя в условиях полигона | 2021 |
|
RU2770713C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УТЕЧЕК ТРУБОПРОВОДА | 2024 |
|
RU2836643C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЕСОВОГО РАСХОДА И ВЕСОВОГО ДОЗИРОВАНИЯ ЖИДКИХ ФЛОТАЦИОННЫХ РЕАГЕНТОВ (ВЕСОВОЙ РАСХОДОМЕР/ДОЗАТОР ЖИДКОСТИ) | 2013 |
|
RU2537099C1 |
| ВНУТРИТРУБНЫЙ СНАРЯД-ДЕФЕКТОСКОП С КОЛЕСНЫМИ ОДОМЕТРАМИ | 2007 |
|
RU2334980C1 |
Изобретение относится к трубопроводному транспорту, а именно к эксплуатации магистральных трубопроводов, и предназначено для отслеживания местоположения очистных и диагностических устройств в трубопроводе в режиме реального времени. Технический результат - повышение надежности определения местонахождения очистного устройства (далее - ОУ) в трубопроводе за счет исключения установки на ОУ средств, имеющих высокую вероятность выхода из строя. Устройство для определения местонахождения очистного устройства в трубопроводе содержит микрокомпьютер, блок питания и модуль связи для соединения микрокомпьютера с компьютером оператора, на который выводится информация о местонахождении очистного устройства в трубопроводе. При этом микрокомпьютер через аналого-цифровые преобразователи соединен с датчиками давления и расхода, устанавливаемыми на трубопроводе, и выполнен с возможностью вычисления расстояния, пройденного очистным устройством в трубопроводе. 2 з.п. ф-лы, 1 ил.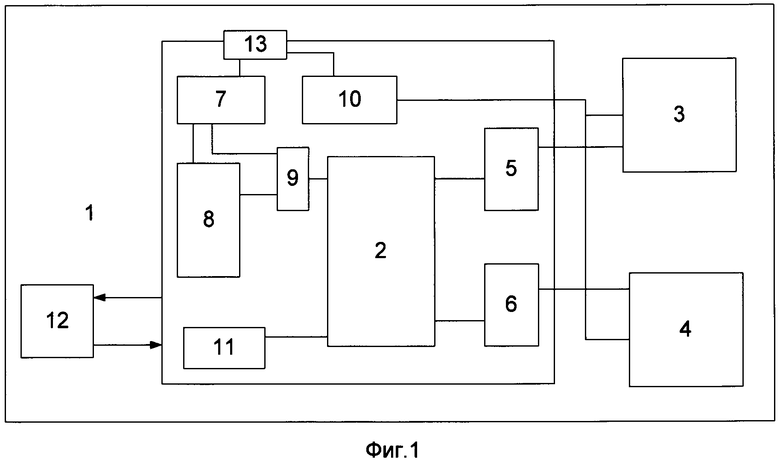
1. Устройство для определения местонахождения очистного устройства в трубопроводе, характеризующееся тем, что содержит микрокомпьютер, блок питания и модуль связи для соединения микрокомпьютера с компьютером оператора, на который выводится информация о местонахождении очистного устройства в трубопроводе, при этом микрокомпьютер через аналого-цифровые преобразователи соединен с датчиками давления и расхода, устанавливаемыми на трубопроводе, и выполнен с возможностью вычисления расстояния, пройденного очистным устройством в трубопроводе, в соответствии с формулой:
L=ν×t,
где t - время движения очистного устройства, ч;
ν - скорость движения очистного устройства, м/ч;
ν=Q/(S+S×i+P/100),
Q - расход жидкости в трубопроводе, м3/ч;
Р - давление в трубопроводе, кгс/см2;
S - площадь поперечного сечения трубопровода, которая вычисляется по формуле S=πd2/A, м2,
где d внутренний диаметр трубопровода;
i - коэффициент пропуска жидкости через очистное устройство, который определяется из эмпирического выражения:
i=Q×e/100,
где е - экспериментальное значение, которое равно 5.
2. Устройство по п. 1, отличающееся тем, что микрокомпьютер выполнен с возможностью вычисления расстояния очистного устройства с учетом наклона трубопровода, пройденного очистным устройством в трубопроводе, в соответствии с формулой:
L=ν×t,
где t - время движения очистного устройства, ч;
ν - скорость движения очистного устройства, м/ч;
ν=Q/(S+S×i+P/100+τ),
где τ - коэффициент наклона трубопровода, определяемый по формуле:
τ=α/(100+α/2),
где α - угол наклона трубопровода;
Q - расход жидкости в трубопроводе, м3/ч;
Р - давление в трубопроводе, кгс/см2;
S - площадь поперечного сечения трубопровода, которая вычисляется по формуле S=πd2/4, м2,
где d внутренний диаметр трубопровода;
i - коэффициент пропуска жидкости через очистное устройство, который определяется из эмпирического выражения:
i=Q×e/100,
где е - экспериментальное значение, которое равно 5.
3. Устройство по п. 1, отличающееся тем, что содержит аккумуляторную батарею.
| СИСТЕМЫ И СПОСОБЫ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ СКРЕБКА В ТРУБОПРОВОДЕ | 2005 |
|
RU2406915C2 |
| US 4419892 A, 13.12.1983 | |||
| Водовозов А.М | |||
| Микроконтроллеры для систем автоматики | |||
| Учебное пособие.-Вологда: ВолГТУ, 2002.-131с., с.3, 62 | |||
| Шаляпин В.В | |||
| Основы микропроцессорной техники: учеб пособие | |||
| СПб: Издательство политехнического университета, 2011 | |||
| Устройство для вытяжки и скручивания ровницы | 1923 |
|
SU214A1 |
| СПОСОБ КОНТРОЛЯ ПРОХОЖДЕНИЯ ОЧИСТНОГО ИЛИ КОНТРОЛЬНО-ИЗМЕРИТЕЛЬНОГО ПОРШНЯ В МАГИСТРАЛЬНОМ ГАЗОПРОВОДЕ | 2009 |
|
RU2412396C1 |
| US 8973444 B2, 10.03.2015 | |||

