Изобретение относится к области рельсовых транспортных средств, в частности к устройствам управления поворотом ходовых тележек при движении по криволинейным участкам пути. Оно направлено главным образом на использование в ходовой части железнодорожных вагонов, а в принципе может быть применимо и в локомотивах.
В целях устранения повышенного износа в системе "колесо-рельс" найдено новое техническое решение в управлении ходовыми тележками подвижного состава с помощью рулевой колесной пары (патент RU №2710051 от 24.12.2019.).
Оптимальным вариантом кинематической схемы управления принят механизм, обеспечивающий такую ориентацию колес ходовых тележек, при которой передние по ходу колеса тележек движутся по касательным к оси рельса в точке их контакта.
Такая схема с неодинаковыми передаточными отношениями и зависимостью от направления движения признана оптимальной с учетом того, что в реальных условиях будут иметь место люфты в соединениях звеньев и подвесках колесных пар, неучтенные деформации, что скажется на фактических углах поворота тележек. Такой вариант управления будет более эффективным и при повышенной скорости подвижного состава, когда центробежные силы не в полной мере компенсируются поперечным уклоном рельсового пути.
Однако такая конструкция довольно сложная и не всегда оправдана. При сведении к минимуму выше указанных факторов вполне возможно применить упрощенную кинематическую схему.
Задачей в предлагаемом варианте является разработка такого механизма, в котором передаточные отношения для обеих тележек одинаковы и не зависят от направления движения состава.
Решением этой задачи стала разработка механизма кинематической связи рулевой колесной пары с ходовой тележкой, содержащей плоскую шарнирную конструкцию с приводом от подвижного основания рулевой колесной пары, в котором - согласно изобретению - передаточные отношения во всех узлах кинематической схемы постоянные, при этом ориентация хода тележек совпадает с направлением касательной cd к оси рельса в средней точке между точками контакта крайних колес каждой тележки.
Такое положение тележек представляется теоретически идеальным.
В этом случае поворот тележек на кривых участках пути будет таким, при котором центр кривизны рельсового пути находится в поперечной плоскости симметрии тележки. При этом одни ее колеса (см. фиг. 1) движутся с углом набегания, а другие - с таким же углом "сбега". Теоретически этот угол
где b - стрела изгиба рельсового пути,
а - база вагона.
Для вагона с базой 20 м при радиусе изгиба пути 200 м стрела а равна 250 мм, а угол ϕ составляет около 1/4 градуса. Это практически его максимальная величина на магистральных путях.
В неуправляемых тележках силы, обусловленные набеганием и сбегом колес, а также опережением (забегом) колес на внутреннем рельсе, поворачивают тележку до упора гребней колес к рельсам с их чрезмерным взаимным трением и износом.
Но при наличии жесткой связи тележек с управляющей колесной парой такой поворот исключается, а поперечные усилия от набегания и сбега колес взаимно компенсируются. Забег колес на внутреннем рельсе сменяется их проскальзыванием, что на ходу практически не влияет на износ бандажей.
При этом центробежные силы, действующие на вагон, в основном компенсируются поперечным уклоном рельсовой колеи.
Все это позволяет сделать вывод, что хотя бы для четырехосных вагонов такой вариант вполне приемлем, что значительно упрощает конструкцию "рулевого" механизма.
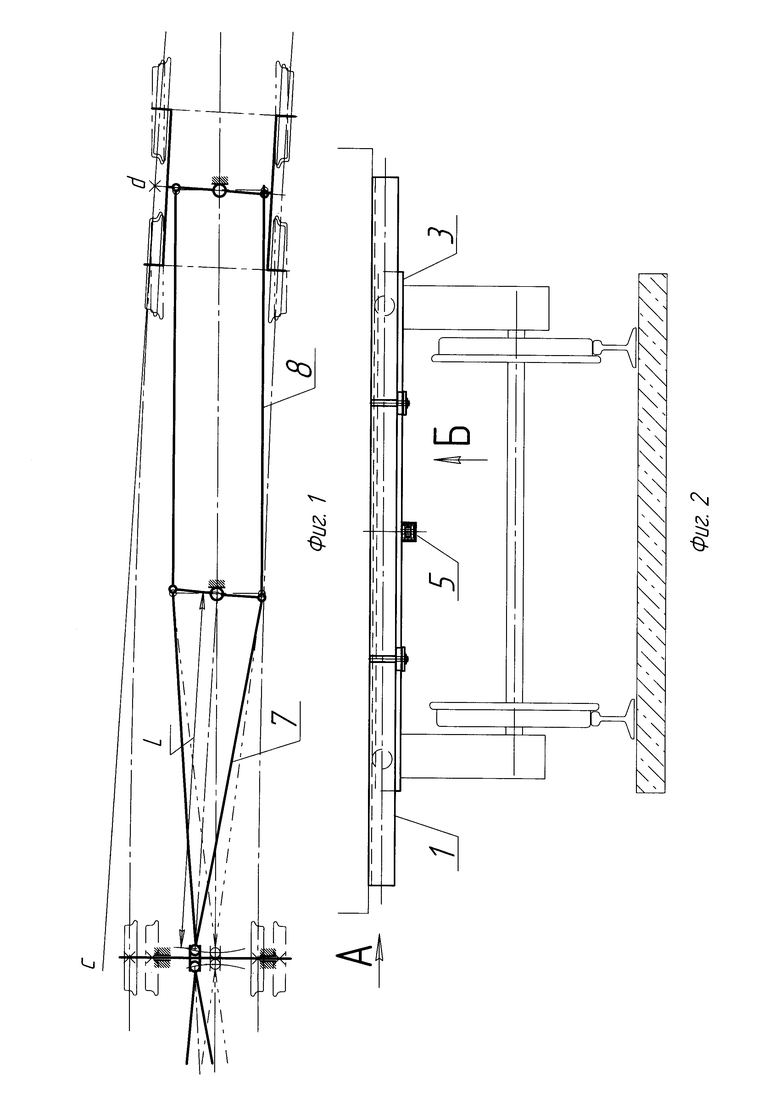
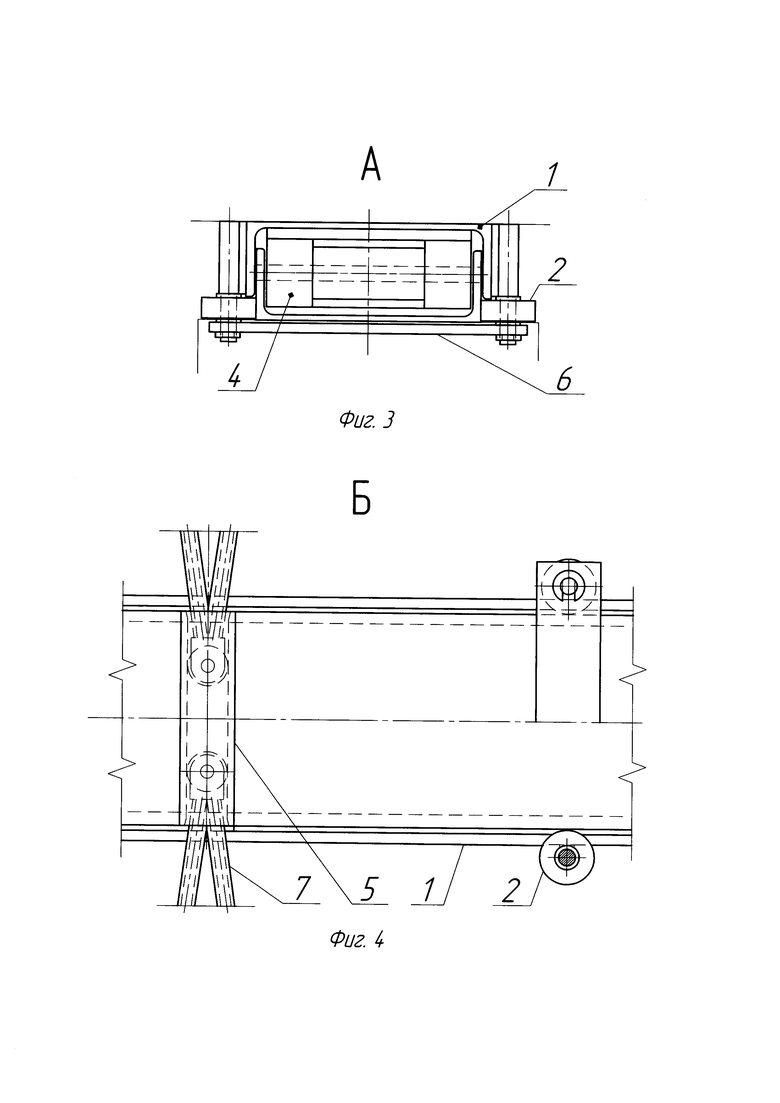
Описание конструкции заявляемого механизма поясняется эскизами, где на фиг. 1 показана кинематическая схема управления тележками, на фиг. 2 - конструкция узла с подвижной балкой рулевой колесной пары, на фиг. 3 - вид А данного узла, на фиг. 4 - вид Б балки с сопряженными приводными рычагами механизма.
На схеме (фиг. 1) показана система управления ходовой частью на одной стороне вагона, где приводной рычаг передает движение от рулевой колесной пары ходовой тележке. При этом обязательными условиями являются:
-плечо L рычага должно равняться 1/4 базы вагона а;
- звенья (тяги), передающие движение надрессорной балке тележки, должны быть параллельны продольной оси вагона и располагаться в общей плоскости с рычагом.
Наиболее простой и надежной конструкцией заявляемого механизма управления представляется устройство, состоящее из поперечной подрамной балки 1 (см фиг. 2) с направляющими роликами 2, в которой установлена ходовая балка 3 с опорными роликами 4 и поводком 5. К концам балки 3 крепятся опорные конструкции рулевой колесной пары. На концах осей роликов 2 могут быть установлены пластины 6 со стопорными элементами. С поводком 5 сопряжены приводные рычаги 7 в виде жесткой конструкции с втулкой для установки на шкворень под вагонной рамой и проушинами под шарнирное соединение с тягами 8, связывающими каждый рычаг с надрессорной балкой той и другой ходовой тележки.
Работа заявляемого механизма в основном не отличается от работы его аналога, описанного в выше упомянутом изобретении. Отличие состоит лишь в том, что длина плеч рычагов остается постоянной при любом направлении движения вагона. На прямых участках рельсового пути рулевая колесная пара жестко удерживает направление хода тележек вдоль колеи. На ее скругленных участках рулевая колесная пара перемещает ходовую балку 3 на роликах 4 строго в поперечном направлении, что обеспечивается направляющей балкой 1 с роликами 2. При этом установленный на балке 3 поводок 5 поворачивает рычаги 7 в сторону искривления колеи, а они тягами 8 меняют направление хода тележек точно на такой же угол. Пластины 6 строго поддерживают положение роликов 2 и в штатном рабочем режиме ходовой части не контактируют с балкой 3.
Заявляемый упрощенный механизм помимо снижения стоимости системы управления ходовыми тележками повысит ее надежность и станет предпочтительным вариантом для большинства типов железнодорожных вагонов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Ходовая часть подвижного состава с рулевой колёсной парой | 2019 |
|
RU2710051C1 |
| СПОСОБ СНИЖЕНИЯ ИЗНОСА СИСТЕМЫ КОЛЕСО-РЕЛЬС И КОНСТРУКЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2449910C2 |
| Устройство для управления угловым положением колесных пар челюстной тележки в железнодорожном пути в зависимости от направления движения | 2022 |
|
RU2783718C1 |
| ТРЕХОСНАЯ ТЕЛЕЖКА С САМОУСТАНАВЛИВАЮЩИМИСЯ ОСЯМИ | 2002 |
|
RU2278040C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |
| ТЕЛЕЖКА ГРУЗОВОГО ВАГОНА | 2005 |
|
RU2292282C1 |
| ТЕЛЕЖКА ГРУЗОВОГО ВАГОНА | 2018 |
|
RU2706668C1 |
| ТРЕХОСНАЯ ТЕЛЕЖКА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2010 |
|
RU2432277C1 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО ТИПА ТРАМВАЙНОГО ВАГОНА, МОТОРНОГО ВАГОНА ЭЛЕКТРОПОЕЗДА ИЛИ ЛОКОМОТИВА НА ЭЛЕКТРИЧЕСКОЙ ТЯГЕ, ТРАМВАЙНЫЙ ВАГОН С ПОНИЖЕННЫМ УРОВНЕМ ПОЛА | 2005 |
|
RU2294294C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ АКТИВНОГО УПРАВЛЕНИЯ РАДИАЛЬНОЙ УСТАНОВКОЙ КОЛЕСНЫХ ПАР ИЛИ КОЛЕСНЫХ СКАТОВ ТРАНСПОРТНЫХ СРЕДСТВ | 2002 |
|
RU2283254C2 |
Изобретение относится к области рельсовых транспортных средств, в частности к устройствам управления поворотом ходовых тележек. Механизм кинематической связи содержит плоскую шарнирную конструкцию. Привод ходовых тележек осуществляется от рулевой колесной пары. Все узлы кинематической схемы выполнены с постоянными передаточными отношениями. Ориентация тележек на кривых участках рельсовой колеи совпадает с направлением касательной к оси рельса в средней точке между точками контакта крайних колес каждой тележки. Упрощается конструкция поворотного устройства. 4 ил.
Механизм кинематической связи рулевой колесной пары с ходовой тележкой, содержащий плоскую шарнирную конструкцию с приводом от подвижного основания рулевой колесной пары, отличающийся тем, что в нем передаточные отношения во всех узлах кинематической схемы постоянные, при этом ориентация хода тележек на скругленных участках рельсовой колеи совпадает с направлением касательной к оси рельса в средней точке между точками контакта крайних колес каждой тележки.
| Ходовая часть подвижного состава с рулевой колёсной парой | 2019 |
|
RU2710051C1 |
| ПОДАВИТЕЛЬ ВИЛЯНИЯ ТЕЛЕЖКИ ГРУЗОВОГО ВАГОНА - АНТИВИЛ В.В. БОДРОВА | 2015 |
|
RU2590756C2 |
| ТРЕХОСНАЯ ТЕЛЕЖКА С САМОУСТАНАВЛИВАЮЩИМИСЯ ОСЯМИ | 2002 |
|
RU2278040C2 |
| CN 208576562 U, 05.03.2019. | |||

