Изобретение относится к технической области оптического контроля полых объектов или, в целом, сосудов, например, таких как бутылки, банки, флаконы, в частности, из стекла, с целью осуществления оптических измерений, в которых участвует по меньшей мере часть дна сосуда.
Изобретение находит свое предпочтительное применение в области измерений вертикальности сосудов или обнаружения дефекта ортогональности дна сосуда по отношению к его оси симметрии, обычно называемого наклонным дном.
В технической области контроля сосудов, в частности, из стекла, таких как бутылки, необходимо измерять вертикальность сосудов для обеспечения, в частности, их заполнения или упаковки. Измерение вертикальности сосуда дает важную информацию о размерных характеристиках сосуда, позволяющую обнаружить дефект его вертикальности, когда измерение превышает контрольное значение. Для измерения вертикальности сосудов было предложено много известных технических решений.
В целом установка для измерения вертикальности сосудов содержит систему перемещения сосудов до поста оптического контроля сосудов. Сосуды находятся на столе во время их перемещения до поста контроля, затем во время их удаления от поста контроля после операции контроля. Стол содержит подвижную плиту, на которую опирается дно сосуда, когда сосуд проходит контроль на указанном посту. Во время операции контроля сосуд поворачивают вокруг его оси по меньшей мере на один оборот.
Обычно пост оптического контроля содержит по меньшей мере один источник света и один или несколько датчиков изображений. Различные технологии контроля описаны, в частности, в документах WO 2012/042582, US 7 010 863 или ЕР 0 341 849. В патентной заявке FR 3 000 193 предложен способ измерения вертикальности сосудов, призванный устранить недостатки известных технологий. Такой способ измерения требует получения матричных изображений, в частности, пятки сосудов. Однако на практике очень трудно получить правильное изображение пятки сосудов.
Из патентной заявки GB 1063479 известно также устройство, позволяющее обнаруживать дефекты, появляющиеся на уровне дна сосудов. Каждый сосуд перемещают на опорном столе до поста оптического контроля, содержащего приемную плиту для размещения сосуда. Эту контрольную плиту с присоской приподнимают над столом и приводят во вращение во время операции контроля, осуществляемой при помощи источников света и датчиков света.
Каждый сосуд перемещают для этой операции контроля, поэтому такие операции являются причиной повреждения этих сосудов. Комбинация движения подъема и вращения приводит к неустойчивости сосудов. Кроме того, не происходит постоянного направления сосуда во время его перемещения с опорного стола на контрольную плиту и с контрольной плиты на опорный стол.
В патентных заявках WO2015/146628 и US2006/0192954 описаны аналогичные установки, предназначенные для приведения во вращение и для вертикального перемещения каждого сосуда во время операции контроля. Эти установки имеют такие же недостатки, как и устройство, раскрытое в документе GB 1063479.
В патентной заявке JP2005 091060 описана установка контроля для приводимых во вращение сосудов. Для этого каждый сосуд опирается на ролики и одновременно приводится во вращение вокруг своей оси на уровне корпуса сосуда.
Задача изобретения состоит в устранении недостатков, присущих известным техническим решениям, за счет создания установки, содержащей пост оптического контроля, позволяющий осуществлять точные измерения, в которых участвует по меньшей мере часть дна сосуда, причем эти измерения не приводят к риску повреждения сосудов.
Для достижения такого технического результата установка содержит по меньшей мере один пост оптического контроля сосудов, содержащий по меньшей мере один источник света и по меньшей мере один датчик света, при этом установка содержит опорный стол для сосудов, имеющий подвижную плиту, на которую опирается дно сосуда во время его контроля на указанном посту, будучи расположенным между источником света и датчиком света, при этом установка содержит систему перемещения сосудов, обеспечивающую, с одной стороны, последовательное позиционирование сосудов на подвижной плите в ходе операции контроля и, с другой стороны, их последовательные перемещения от поста контроля после операции контроля.
Согласно изобретению, подвижная плита содержит по меньшей мере одну подвижную убирающуюся часть, обрамленную с двух сторон неподвижными частями подвижной плиты, причем эта часть может перемещаться под действием привода, обеспечивающего перемещение этой подвижной части между переходным положением, в котором эта подвижная часть находится на одном уровне со столом, и положением контроля, в котором эта подвижная часть опущена относительно неподвижных частей таким образом, что часть дна сосуда отходит от подвижной плиты и что источник света и датчик света расположены относительно подвижной части подвижной плиты таким образом, что в положении контроля подвижной части датчик может принимать пучок световых лучей, излучаемых источником света и распространяющихся в контрольном объеме, в котором находится по меньшей мере часть дна сосуда, находящаяся на расстоянии от подвижной плиты.
Кроме того, заявленная установка может иметь в комбинации один и/или другой из следующих дополнительных отличительных признаков:
- подвижная плита ограничивает два контрольных объема для двух симметричных частей дна сосуда при помощи двух подвижных убирающихся частей, обрамленных с двух сторон неподвижными частями подвижной плиты, при этом подвижная часть или подвижные части подвижной плиты входят в состав подвижного узла, направляемого в вертикальном перемещении и взаимодействующего с верхним упором, когда подвижная часть или подвижные части подвижной плиты занимают переходное положение, при этом подвижный узел удерживается в контакте с упором под действием упругого возвратного усилия;
- верхний упор оснащен системой, обеспечивающей вертикальную регулировку подвижной части относительно стола;
- подвижная часть или подвижные части подвижной плиты закреплены разъемно на подвижном узле;
- для каждой подвижной части установлен по меньшей мере один воздуходувный патрубок, выходящий под подвижной частью и сообщающийся с устройством подачи воздуха;
- привод подвижной части подвижной плиты связан с блоком управления, с которым соединены система перемещения сосудов и пост контроля, причем этот блок управления управляет приводом для установки подвижной части:
- в ее переходное положение, чтобы система перемещения могла доставить сосуд на подвижную плиту;
- в ее положение контроля во время операции контроля;
- и в конце операции контроля в ее переходное положение, чтобы система перемещения могла переместить сосуд, находящийся на подвижной плите;
- датчик света является датчиком изображений;
- источник света и датчик изображений расположены относительно подвижной части подвижной плиты таким образом, чтобы в положении контроля подвижной части датчик мог снимать изображение профиля по меньшей мере утора и соседней части дна сосуда, находящейся на расстоянии от подвижной плиты.
Другим объектом изобретения является способ контроля для поста оптического контроля сосудов, опирающихся своим дном на опорный стол, при этом способ содержит следующие этапы, на которых:
- располагают сосуды последовательно на подвижной плите опорного стола, на которую опирается дно сосуда во время операции контроля при помощи указанного поста, будучи расположенным между источником света и датчиком света;
- перемещают сосуды последовательно за пределы поста контроля после операции контроля.
Согласно заявленному способу:
- располагают сосуд относительно по меньшей мере части подвижной плиты, которая является подвижной и располагается перед доставкой сосуда на пост контроля в переходном положении, в котором эта подвижная часть находится на одном уровне со столом;
- опускают перед операцией контроля эту подвижную часть в положение контроля, в котором эта подвижная часть отстоит от дна сосуда, по меньшей мере часть которого отошла от подвижной плиты таким образом, чтобы датчик мог принимать пучок световых лучей, распространяющихся в контрольном объеме, в котором находится по меньшей мере часть дна сосуда, находящаяся на расстоянии от подвижной плиты;
- подвижную часть удерживают в ее положении контроля во время операции контроля;
- после операции контроля и перед перемещением сосуда за пределы поста контроля подвижную часть перемещают в ее переходное положение.
Кроме того, заявленный способ может иметь в комбинации один и/или другой из следующих дополнительных отличительных признаков:
- по меньшей мере одну подвижную часть подвижной плиты опускают в положение контроля, в котором две симметричные части дна сосуда отходят от подвижной плиты;
- обеспечивают во время операции контроля вращение сосуда вокруг его вертикальной оси по меньшей мере на один оборот;
- во время вращения сосуда датчик света принимает пучки световых лучей, распространяющихся в контрольных объемах, в которых находятся по меньшей мере две симметричные части дна сосуда, отошедшие от подвижной плиты, и анализируют пучки принимаемых световых лучей с целью обнаружения дефекта ортогональности дна относительно оси симметрии сосуда;
- используют в качества датчика света датчик изображений и располагают источник света и датчик изображений относительно подвижной части подвижной плиты таким образом, чтобы в положении контроля подвижной части датчик мог снимать изображение профиля по меньшей мере утора и соседней части дна сосуда, находящейся на расстоянии от подвижной плиты.
Различные другие отличительные признаки будут более очевидны из нижеследующего описания со ссылками на прилагаемые чертежи, которые иллюстрируют в качестве неограничивающих примеров варианты осуществления изобретения.
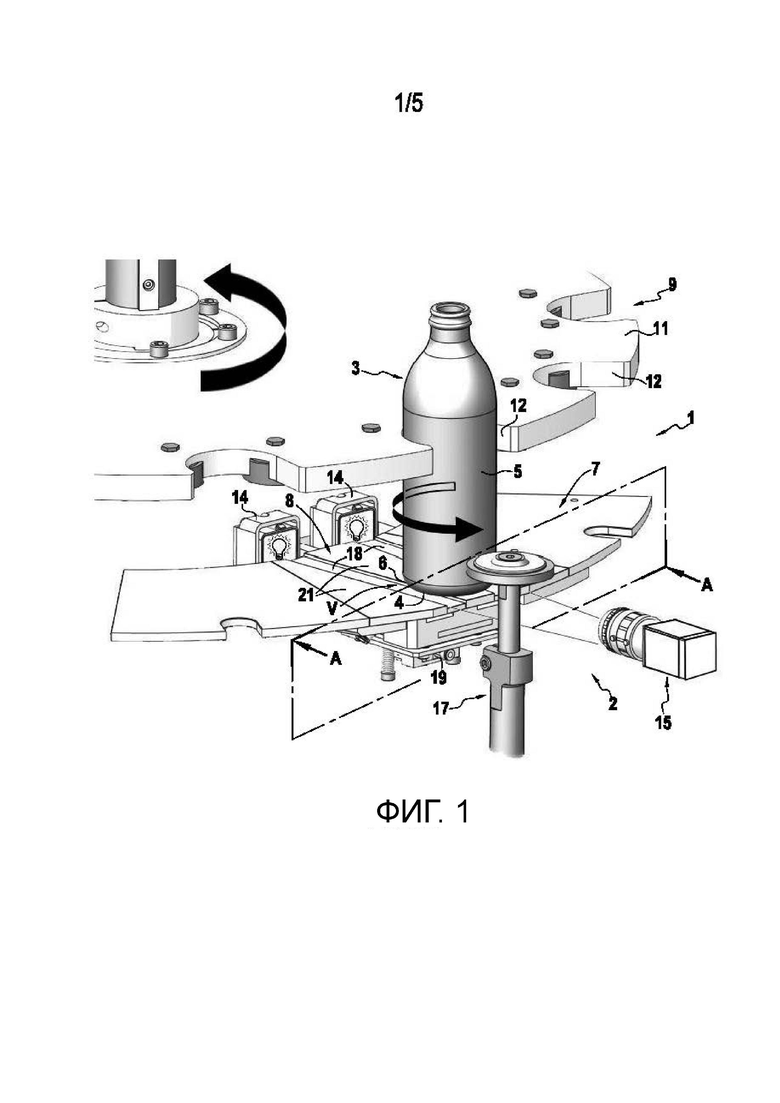
На фиг. 1 показана установка контроля в соответствии с изобретением, изображенная в положении контроля, вид в перспективе;
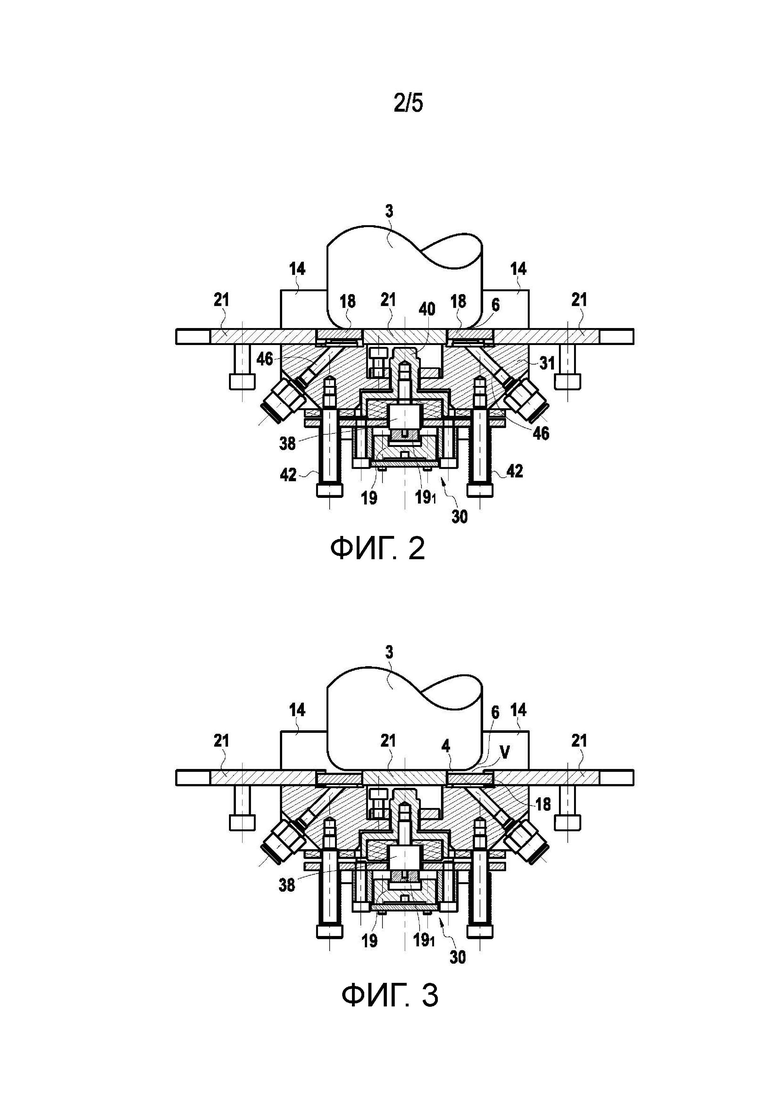
на фиг. 2 и 3 показана заявленная установка контроля, причем эта установка показана соответственно в переходном положении и в положении контроля сосудов, виды спереди в поперечном разрезе по существу по линиям А-А фиг. 1;
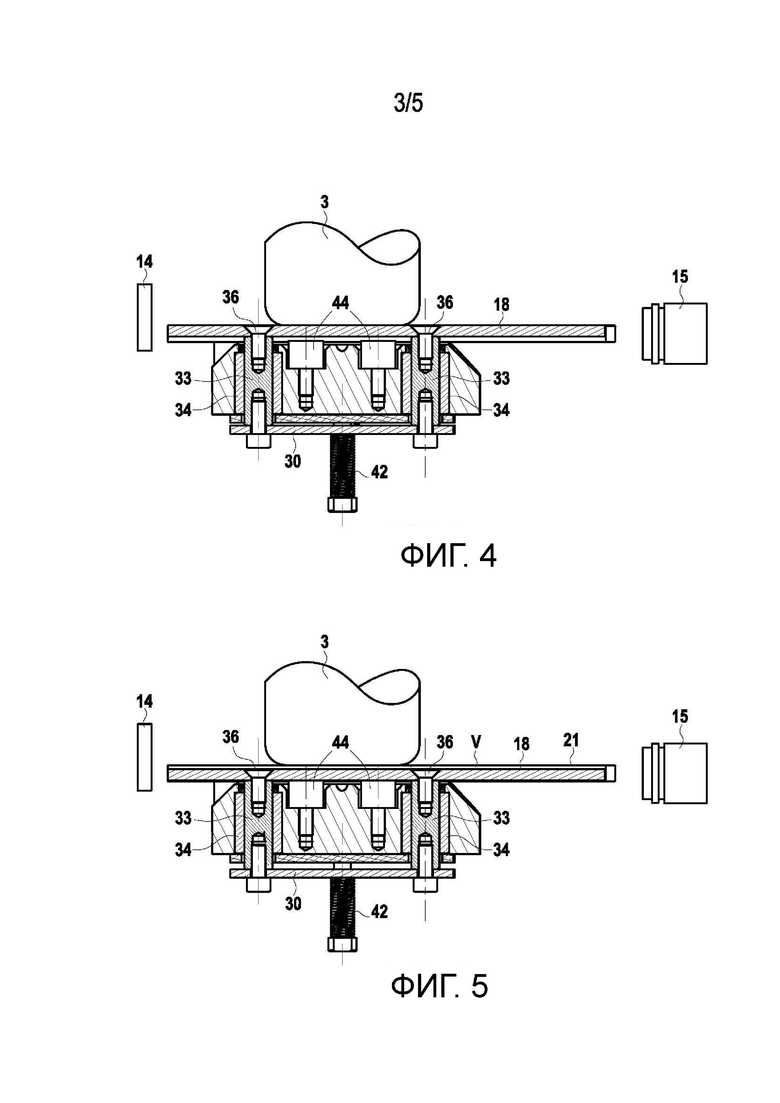
на фиг. 4 и 5 показана заявленная установка контроля на уровне подвижной части подвижной плиты, причем эта установка показана соответственно в переходном положении и в положении контроля сосудов, виды спереди в разрезе;
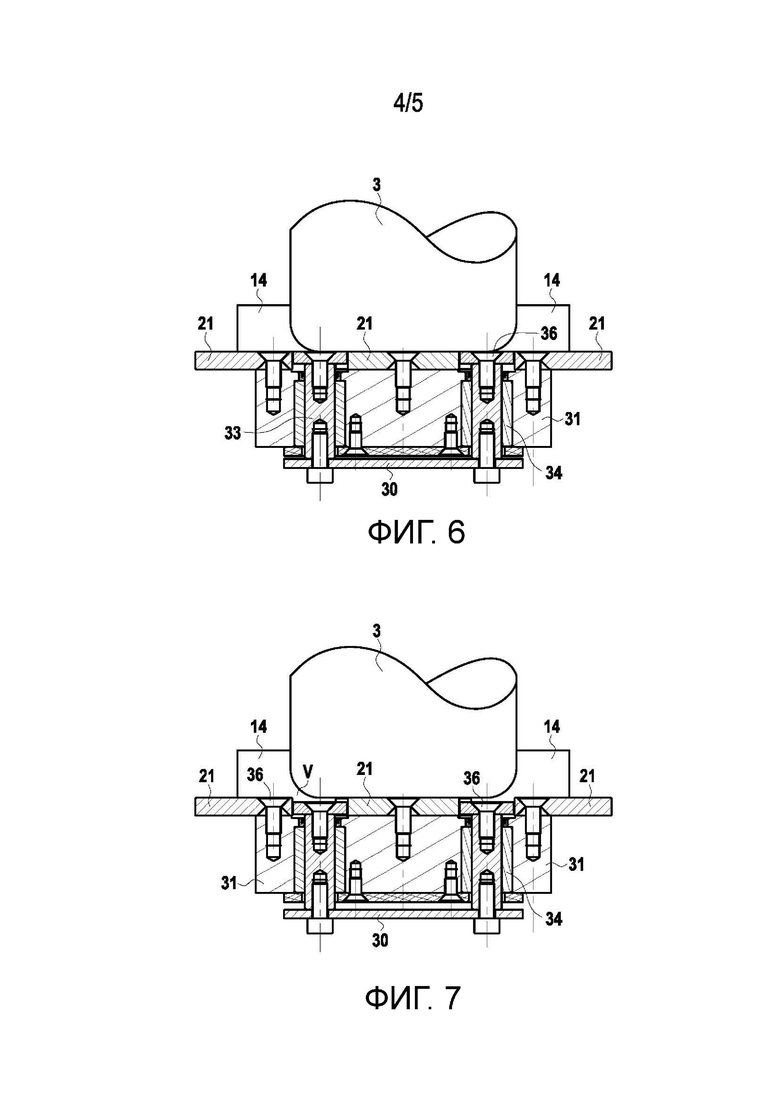
на фиг. 6 и 7 показана заявленная установка контроля, изображенная соответственно в переходном положении и в положении контроля сосудов, виды спереди в поперечном разрезе;
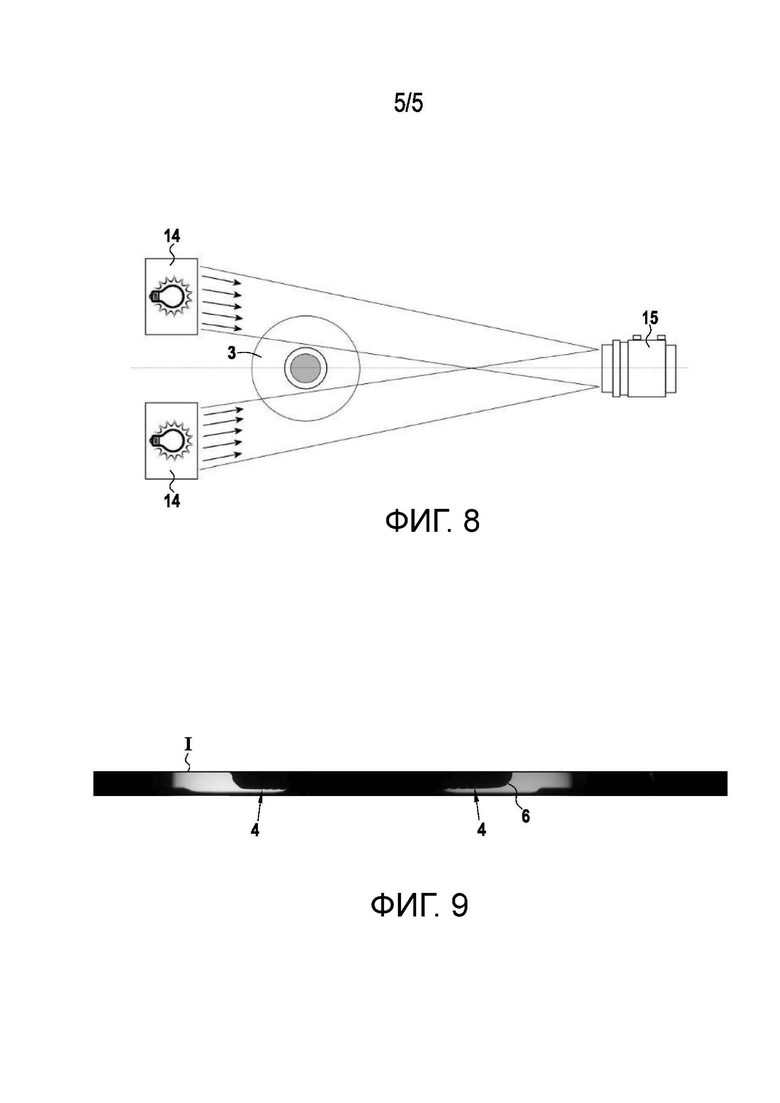
на фиг. 8 схематично показана заявленная установка контроля, вид сверху;
на фиг. 9 представлено изображение профиля сосуда, полученное при помощи заявленной установки контроля.
Объектом изобретения является установка 1, содержащая по меньшей мере один пост 2 оптического контроля сосудов 3, например, стеклянных сосудов, таких как бутылки. Классически каждый сосуд 3 имеет дно 4, от которого отходит вверх вертикальный корпус 5. Дно 4 сопрягается с вертикальным корпусом 5 через пятку или утор 6.
Установка 1 содержит опорный стол 7 для сосудов 3. Этот опорный стол 7 имеет на уровне поста 2 контроля подвижную плиту 8, на которую опирается дно 4 сосуда во время его контроля на указанном посту. Установка 1 содержит также систему 9 перемещения сосудов, обеспечивающую, с одной стороны, доставку сосудов 3 на пост 2 контроля и, с другой стороны, их перемещение от поста 2 контроля после операции контроля. В представленном примере эта система 9 перемещения содержит передвижную звездочку 11, содержащую ячейки 12, каждая из которых предназначена для размещения в ней корпуса сосуда. Эта передвижная звездочка 11 приводится во вращение для обеспечения последовательного позиционирования бутылок на посту 2 контроля. Разумеется, каждый сосуд 3 удерживается на посту контроля в течение времени, необходимого для предусмотренной операции контроля. Согласно примеру, представленному на чертежах, система 9 перемещения является вращающейся, но понятно, что доставку и удаление сосудов можно производить при помощи другой системы перемещения, такой как линейная система.
Пост 2 контроля выполнен с возможностью осуществления оптических измерений, в которых участвует по меньшей мере часть дна сосуда. Согласно предпочтительному примеру осуществления пост 2 контроля выполнен с возможностью осуществления измерения вертикальности сосудов в соответствии со способом, описанным в патенте FR 3 000 193. Согласно другому примеру осуществления, пост 2 контроля выполнен с возможностью обнаружения дефекта ортогональности дна сосуда относительно его оси симметрии, обычно называемого наклонным дном.
В целом пост 2 контроля содержит по меньшей мере один источник 14 света и по меньшей мере один датчик 15 света, выполненный с возможностью принимать пучок световых лучей, излучаемых источником света. Под пучком световых лучей следует понимать все световые лучи, излучаемые источником света определенного размера в заданном направлении. Пучок световых лучей может быть расходящимся, параллельным или сходящимся. Пучок световых лучей может быть ограниченным, например, когда он проходит через отверстие или когда он затенен каким-либо предметом.
Источник или источники 14 света расположены с одной стороны сосуда, то есть с одной стороны от подвижной плиты 8, тогда как датчик или датчики 15 света расположены с другой стороны сосуда, то есть с другой стороны от подвижной плиты 8. Таким образом, каждый сосуд 3 расположен на посту контроля между источником 14 света и датчиком 15 света, что позволяет наблюдать каждый сосуд сбоку, включая часть дна сосуда.
Этот пост 2 контроля содержит не показанный блок анализа и обработки, связанный с каждым датчиком 15 света и выполненный с возможностью определять дефект ортогональности или измерять вертикальность сосудов. Детальное описание этого блока анализа и обработки опускается, так как он не является объектом изобретения.
В предпочтительном варианте применения, представленном на чертежах, пост 2 контроля выполнен с возможностью измерения вертикальности сосудов в соответствии со способом, описанным в патенте FR 3 000 193. Согласно этому примеру осуществления, пост 2 контроля содержит систему 17 приведения во вращение сосуда вокруг его вертикальной оси во время операции контроля.
Согласно этому варианту применения, каждый датчик 15 света является датчиком изображений, то есть матричной камерой, оснащенной объективом. По меньшей мере один из датчиков изображений снимает матричные изображения, содержание левую и правую части пятки сосудов. В не показанной конфигурации можно использовать два разных датчика, при этом первый датчик изображений снимает матричные изображения, содержащие левую часть пятки, тогда как второй датчик изображений снимает изображения правой части пятки. Как будет более подробно описано ниже, такой датчик 5 изображений принимает два пучка световых лучей, излучаемых по меньшей мере одним и в представленном примере двумя источниками 14 света (фиг. 8). Источники 14 света расположены с одной стороны от подвижной плиты 8, тогда как датчик 15 света расположен с другой стороны от подвижной плиты 8. Таким образом, каждый сосуд 3 расположен на посту контроля между источниками 14 света и датчиком 15 света, что позволяет наблюдать профиль каждого сосуда на уровне пятки и дна сосуда.
Пост 2 контроля может быть выполнен с возможностью осуществления других измерений, в которых участвует по меньшей мере часть дна сосуда. Это относится, например, к посту, обнаруживающему дефект ортогональности дна сосуда по отношению к его вертикальной оси симметрии. Согласно этому варианту применения, в качестве датчика 15 света пост 2 контроля содержит простой фотоэлемент, который измеряет мощность пучка световых лучей, излучаемых источником 14 света, находящимся противоположно к фотоэлементу относительно сосуда. Этот источник света направляет в сторону фотоэлемента пучок световых лучей постоянной интенсивности. Во время операции измерения сосуд 3 приводится во вращение, и пучок световых лучей ограничен сверху дном сосуда и снизу подвижной плитой опорного стола или неподвижной заслонкой, которая служит точкой отсчета.
Когда расстояние между дном сосуда и точкой отсчета уменьшается (соответственно увеличивается), пучок световых лучей частично сужается (соответственно расширяется), и световая мощность, принимаемая фотоэлементом, является функцией этого расстояния. Таким образом, при помощи двух устройств этого типа, расположенных симметрично относительно оси вращения, и посредством анализа изменений мощности на двух фотоэлементах можно обнаруживать аномалии при вращении дна сосудов. Если исходить из предположения, что корпус сосуда вращается вокруг вертикальной оси симметрии, то аномалии вращения связаны с дефектом ортогональности дна относительно вертикальной оси симметрии, называемым также кривым дном.
Согласно отличительному признаку изобретения, подвижная плита 8 содержит по меньшей мере одну подвижную часть 18, перемещающуюся под действием привода 19, обеспечивающего перемещение этой подвижной части между переходным положением, в котором эта подвижная часть 18 находится на одном уровне со столом 7, и положением контроля, в котором эта подвижная часть 18 опущена так, что часть дна 4 находится на расстоянии относительно подвижной плиты 8.
Как показано на фиг. 1-7, подвижная плита 8 содержит две подвижные части 18, находящиеся под двумя симметрично противоположными частями дна сосуда. Разумеется, можно предусмотреть пример осуществления, в котором подвижная плита 8 содержит только одну подвижную часть 18, находящуюся под одной частью дна сосуда. Понятно, что в переходном положении, показанном на фиг. 2, 4, 6, подвижная плита 8 имеет плоскую гладкую поверхность без какой-либо выступающей части. В этом переходном положении сосуд 3, находящийся на входе поста 2 контроля, можно переместить с опорного стола 7 на подвижную плиту 8, чтобы расположить его на уровне поста 2 контроля. Таким образом, сосуд 3 перемещается скольжением по плоской поверхности опорного стола 7 до подвижной плиты 8. Точно так же, в этом переходном положении сосуд 3, прошедший контроль на посту 2, можно переместить с подвижной плиты 8 на опорный стол 7 за пределы поста 2 контроля. Сосуд 3 перемещается так же скольжением по плоской поверхности, покидая подвижную плиту 8, чтобы опять вернуться на опорный стол 7.
Как показано на фиг. 1, 3, 5, 7, когда подвижные части 18 подвижной плиты 8 занимают свое положение контроля, часть дна 4 находится на расстоянии от подвижной плиты 8. Таким образом, когда подвижные части 18 занимают это положение контроля, датчик 15 может принимать пучок световых лучей, распространяющийся в контрольном объеме V, в котором находится по меньшей мере часть дна 4 сосуда, отведенная от подвижных частей 18 подвижной плиты 8 (фиг. 9). Таким образом, между дном 4 сосуда и подвижной плитой 8 пучок световых лучей, поступающий от источника или источников 14 света, свободно доходит до датчика 15 света. Это позволяет наблюдать профиль или силуэт дна 4 и предпочтительно дна 4 и утора 6 с одной стороны сосуда или предпочтительно с двух сторон сосуда.
Каждая подвижная часть 18 выполнена в виде удлиненной пластины, проходящей по всей ширине опорного стола 7, занимая место внутри выреза, выполненного в опорном столе 7. Форма выреза предусмотрена таким образом, чтобы обеспечивать прохождение света между источником 14 света и датчиком 15 света в направлении или направлениях наблюдения, которые зависят от положений датчика света, от оптического центра его объектива и от направления оптической оси. Форма выреза соответствует также формам и размерам сосудов 3. Например, для обеспечения контроля партий сосудов разного диаметра, можно предусмотреть несколько наборов подвижных плит, которые меняют при переходе от сосудов небольшого диаметра к сосудам большого диаметра.
Кроме того, источники 14 света расположены с одной стороны от подвижной плиты 8 по существу на уровне этой подвижной плиты, тогда как датчик 15 света расположен с другой стороны от подвижной плиты 8 по существу на уровне этой подвижной плиты 8. Таким образом, когда подвижная часть 18 занимает свое положение контроля, часть пространства, находящаяся под дном 4 сосуда и между источниками 14 света и датчиком 15 изображений, освобождается, обеспечивая свободное прохождение света до датчика изображений (фиг. 1, 3, 5, 7).
В примере осуществления, представленном на фиг. 1-7, подвижная плита 8 содержит по меньшей мере одну подвижную часть 18, которая убирается или опускается, то есть располагается с отступом или внизу относительно неподвижных частей 21 подвижной плиты 8, обрамляющих эту подвижную часть 18. В представленном предпочтительном примере подвижная плита 8 содержит две убирающиеся подвижные части 18, обрамляемые, каждая, с двух сторон неподвижными частями 21 подвижной плиты. Таким образом, в положении контроля подвижной плиты 18 подвижные части 18 находятся на нижнем уровне относительно плоскости, занимаемой неподвижными частями 21, что позволяет открыть с двух сторон сосуда часть дна 4 сосуда относительно подвижной плиты. В положении контроля подвижные части 18 отходят от дна сосуда и опускаются, располагаясь ниже дна сосуда. Смещение подвижной части 18 по отношению к неподвижной части 21 является более или менее значительным и, как правило, может составлять от 0,2 мм до 2 мм. Разумеется, это смещение зависит от условий оптического контроля. Подвижные части 18 и неподвижные части 21 регулируют таким образом, чтобы ограничить зазор между этими подвижными и неподвижными частями и чтобы в переходном положении гладкая поверхность стола была как можно более сплошной.
Таким образом, каждый сосуд 3 перемещается в одной плоскости, когда сосуд доставляют на подвижную плиту 8 и когда сосуд перемещают или удаляют с подвижной плиты. Следует отметить, что сосуд остается в этой плоскости, когда подвижные части 18 убираются или опускаются.
Согласно предпочтительному варианту применения, в котором производят измерение вертикальности сосудов согласно способу, описанному в патенте FR 3 000 193, подвижные части 18 находятся напротив каждой части дна 4, соседней с утором 6 сосуда. Таким образом, в положении контроля сосуд остается в постоянном контакте с подвижной плитой 8, опираясь в средней части своего дна на центральную неподвижную часть 21.
Можно отметить, что предпочтительно подвижная плита 8 ограничивает два контрольных объема V для двух симметричных частей дна сосуда при помощи двух убирающихся подвижных частей 18, обрамленных с двух сторон неподвижными частями подвижной плиты.
Перемещение подвижной части или подвижных частей 18 между переходным положением и положением контроля осуществляют при помощи привода 19. Траектория перемещения между этими двумя положениями может быть любой. В дальнейшем тексте описания предусмотрено, что перемещение подвижной части или подвижных частей 18 является вертикальным, но понятно, что перемещение может быть результатом комбинации прямолинейных и/или криволинейных движений или, например, поворотного движения.
Как следует, в частности, из фигур, подвижная часть или подвижные части 18 подвижной плиты 8 входят в состав подвижного узла 30, направляемого в представленном предпочтительном примере в вертикальном перемещении относительно опоры 31, закрепленной на столе 7. Этот подвижный узел 30 оснащен системой направления поступательного движения, содержащей по меньшей мере один и в представленном примере четыре штока 33, взаимодействующих с втулками 34, установленными в опоре 31.
Согласно предпочтительному отличительному признаку осуществления, подвижная часть или подвижные части 18 подвижной плиты 8 закреплены разъемно на подвижном узле 30. Таким образом, как следует из фиг. 4-7, каждая подвижная часть 18 закреплена на подвижном узле 30 при помощи соединительных винтов 36. Таким образом, эти подвижные части 18 можно легко заменить в случае износа.
Этот подвижный узел 30 перемещают поступательным движением при помощи привода 19, выполненного любым соответствующим образом, например, в виде электрического или пневматического домкрата или даже в виде электромагнита, в виде кулачка, совершающего поворотное движение или посредством эксцентрикового или рычажного монтажа. В представленном примере привод 19 представляет собой пневматический домкрат, корпус которого установлен на подвижном узле 30. Этот привод 19 содержит шток 191, действующий на опору 31 через верхний упор 38.
Согласно предпочтительному отличительному признаку осуществления, этот подвижный узел 30 взаимодействует с верхним упором 38, когда подвижная часть или подвижные части 18 подвижной плиты занимают переходное положение. Этот верхний упор 38, выполненный из амортизирующего материала, закреплен на опоре 31. Согласно предпочтительному варианту осуществления, верхний упор 38 оснащен системой 40, обеспечивающей вертикальную регулировку подвижной части 18 относительно стола 7. Эта система 40, например, винтового типа, позволяет регулировать вертикальное положение упора подвижного узла 30 относительно опоры 31. Эта регулировка позволяет гарантировать взаимное расположение на одном уровне между подвижными частями 18 и неподвижными частями 21 подвижной плиты в переходном положении.
Предпочтительно подвижный узел 30 удерживается в контакте с верхним упором 38 под действием упругого возвратного усилия, создаваемого пружинами 42. Иначе говоря, пружины 42 постоянно действуют на подвижный узел 30, чтобы он находился в контакте со своим верхним упором 38. Таким образом, переходное положение является положением по умолчанию.
Следует отметить, что подвижный узел 30 входит также в контакт с нижними упорами 44, установленными на опоре 31, когда подвижные части 18 и, следовательно, подвижный узел занимают положение контроля.
Согласно другому отличительному признаку, установка содержит для каждой подвижной части 18 по меньшей мере один воздуходувный патрубок 46, выходящий под подвижной частью и сообщающийся с устройством подачи воздуха. Нагнетаемый воздух позволяет удалить возможную пыль или мусор, чтобы избегать заклинивания подвижных частей 18 относительно неподвижных частей 21.
Привод 19 подвижной части 18 подвижной плиты связан с блоком управления, с которым соединены система 9 перемещения сосудов и пост 2 контроля. Этот блок управления управляет приводом 19, чтобы располагать каждую подвижную часть 18:
- в ее переходное положение, чтобы система перемещения могла доставить сосуд на подвижную плиту 8;
- в ее убранное положение во время операции контроля;
- и в конце операции контроля в ее переходное положение, чтобы система 9 перемещения могла переместить сосуд, находящийся на подвижной плите.
Заявленная установка позволяет применить способ контроля сосудов, опирающихся своим дном 4 на опорный стол 7 и доставляемых последовательно на пост контроля, где каждый сосуд располагают на подвижной плите 8. Этот способ содержит следующие этапы, на которых:
- располагают по меньшей мере одну подвижную часть 18 подвижной плиты 8 в переходное положение, в котором эта подвижная часть 18 находится на одном уровне со столом 7;
- перемещают сосуд 3, чтобы доставить его на пост 2 контроля, располагая дно 4 сосуда на подвижной плите 8 стола, причем этот сосуд 3 располагают между по меньшей мере одним источником 14 света и датчиком 15 света для обеспечения наблюдения профиля сосуда, включая по меньшей мере часть дна сосуда;
- опускают, перед операцией контроля, подвижную часть 18 этой подвижной плиты в убранное положение, в котором по меньшей мере одна часть дна 4 сосуда находится на расстоянии от подвижной плиты таким образом, чтобы датчик 15 мог принимать пучок световых лучей, распространяющихся в контрольном объеме V, в котором находится по меньшей мере часть дна 4 сосуда, находящаяся на расстоянии от подвижной плиты;
- удерживают подвижную часть 18 в ее положении контроля во время операции контроля;
- после операции контроля и перед перемещением сосуда за пределы поста контроля подвижную часть 18 поднимают для ее установки в ее переходное положение;
- перемещают сосуд 3 за пределы поста контроля после операции контроля;
- и последовательно повторяют вышеупомянутые этапы для следующих предназначенных для контроля сосудов.
Таким образом, способ контроля позволяет наблюдать профиль сосудов, включая часть дна сосудов. Следует отметить, что по меньшей мере одну подвижную часть 18 подвижной плиты 8 можно перемещать вертикально в положение контроля таким образом, чтобы две симметричные части дна сосуда отошли от подвижной плиты.
Следует отметить, что в зависимости от типа осуществляемого контроля можно приводить во вращение сосуд вокруг его вертикальной оси по меньшей мере на один оборот.
Согласно первому варианту применения, способ состоит в том, что во время вращения сосуда датчик 15 света принимает пучки световых лучей, исходящих из источника 14 света и распространяющихся в контрольных объемах, в которых находятся по меньшей мере две симметричные части дна сосуда, отошедшие от подвижной плиты, и анализируют пучки световых лучей для обнаружения дефекта ортогональности дна относительно оси симметрии сосуда.
Согласно второму варианту применения способа, в качестве датчика 15 света используют датчик изображений и располагают источник 14 света и датчик 15 изображений относительно подвижной части подвижной плиты таким образом, чтобы в положении контроля подвижной части датчик мог снимать изображение I профиля по меньшей мере утора и соседней части дна сосуда, находящейся на расстоянии от подвижной плиты. На фиг. 9 представлен пример изображения I утора и дна сосуда, полученного при помощи датчика 15 изображений.
Изобретение не ограничивается описанными и показанными на фигурах примерами, и в него можно вносить различные изменения, не выходя за рамки его объема.
Объектом изобретения является установка (2) оптического контроля сосудов (3), содержащая опорный стол (7) для сосудов, имеющий подвижную плиту (8), на которую опирается дно сосуда. Подвижная плита (8) содержит подвижную часть (18), перемещающуюся под действием привода (19), обеспечивающего перемещение этой подвижной части (18) между переходным положением, в котором эта подвижная часть находится на одном уровне со столом, и положением контроля, в котором подвижная часть (18) расположена на расстоянии относительно подвижной плиты (8). Источник (14) света и датчик (15) света расположены так, что в положении контроля подвижной части датчик мог принимать пучок световых лучей, распространяющихся в контрольном объеме (V), в котором расположена по меньшей мере часть дна (4) сосуда, находящаяся на расстоянии от подвижной плиты. Технический результат – снижение риска повреждения сосудов. 2 н. и 12 з.п. ф-лы, 9 ил.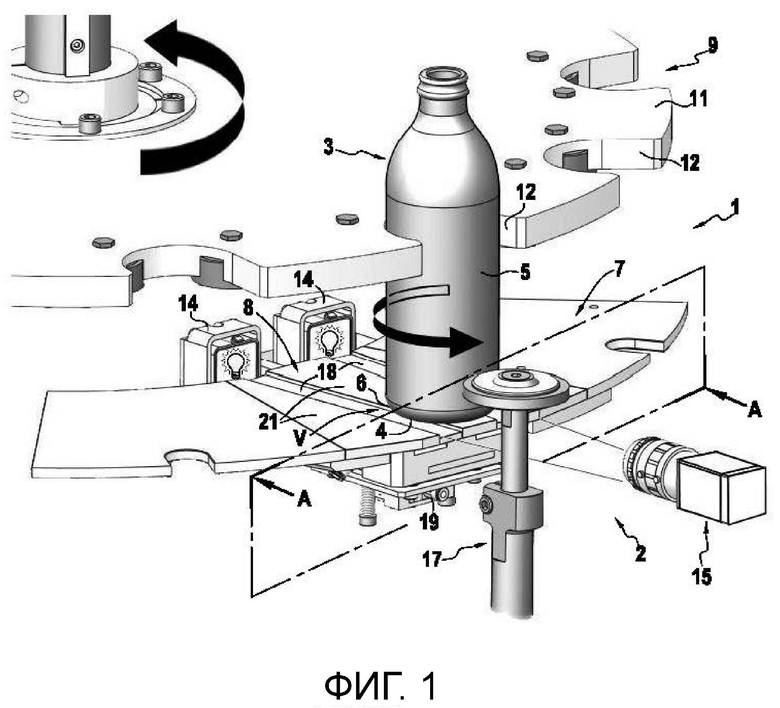
1. Установка оптического контроля сосудов, содержащая по меньшей мере один пост (2) оптического контроля сосудов (3), содержащий по меньшей мере один источник (14) света и по меньшей мере один датчик (15) света, при этом установка включает в себя опорный стол (7) для сосудов, имеющий подвижную плиту (8), на которую опирается дно сосуда во время его контроля на указанном посту, будучи расположенным между источником света и датчиком света, при этом установка содержит систему (9) перемещения сосудов, обеспечивающую последовательное позиционирование сосудов на подвижной плите в ходе операции контроля и их последовательные перемещения от поста контроля по завершении операции контроля, отличающаяся тем, что подвижная плита (8) содержит по меньшей мере одну подвижную убирающуюся часть (18), обрамленную с двух сторон неподвижными частями (21) подвижной плиты, причем эта подвижная часть (18) выполнена с возможностью перемещения под действием привода (19), обеспечивающего перемещение этой подвижной части (18) между переходным положением, в котором эта подвижная часть (18) находится на одном уровне со столом, и положением контроля, в котором эта подвижная часть (18) опущена относительно неподвижных частей так, что часть дна (4) сосуда находится на расстоянии от подвижной плиты (8), при этом источник (14) света и датчик (15) света расположены относительно подвижной части (18) подвижной плиты так, что в положении контроля подвижной части датчик может принимать пучок световых лучей, излучаемых источником света и распространяющихся в контрольном объеме (V), в котором находится по меньшей мере часть дна (4) сосуда, находящаяся на расстоянии от подвижной плиты.
2. Установка по п. 1, отличающаяся тем, что подвижная плита (8) ограничивает два контрольных объема (V) для двух симметричных частей дна сосуда при помощи двух подвижных убирающихся частей (18), обрамленных с двух сторон неподвижными частями подвижной плиты (8).
3. Установка по одному из пп. 1, 2, отличающаяся тем, что подвижная часть или подвижные части (18) подвижной плиты (8) входят в состав подвижного узла (30), направляемого в вертикальном перемещении и взаимодействующего с верхним упором (38), когда подвижная часть или подвижные части (18) подвижной плиты занимают переходное положение, при этом подвижный узел (30) удерживается в контакте с упором под действием упругого возвратного усилия.
4. Установка по п. 3, отличающаяся тем, что верхний упор (38) оснащен системой, обеспечивающей вертикальную регулировку подвижной части относительно стола.
5. Установка по одному из пп. 3, 4, отличающаяся тем, что подвижная часть или подвижные части (18) подвижной плиты (8) закреплены разъемно на подвижном узле (30).
6. Установка по одному из пп. 1-5, отличающаяся тем, что для каждой подвижной части содержит по меньшей мере один воздуходувный патрубок (46), выходящий под подвижной частью и сообщающийся с устройством подачи воздуха.
7. Установка по одному из пп. 1-6, отличающаяся тем, что привод (19) подвижной части (18) подвижной плиты связан с блоком управления, с которым соединены система перемещения сосудов и пост контроля, причем этот блок управления управляет приводом для установки подвижной части:
- в ее переходное положение, чтобы дать возможность системе перемещения доставить сосуд на подвижную плиту;
- в ее положение контроля во время операции контроля
- и в конце операции контроля в ее переходное положение, чтобы дать возможность системе перемещения переместить сосуд, находящийся на подвижной плите.
8. Установка по одному из пп. 1-7, отличающаяся тем, что датчик (15) света является датчиком изображений.
9. Установка по п. 8, отличающаяся тем, что источник (14) света и датчик (15) изображений расположены относительно подвижной части подвижной плиты так, чтобы в положении контроля подвижной части датчик (15) мог снимать изображение профиля по меньшей мере утора и соседней части дна сосуда, находящейся на расстоянии от подвижной плиты.
10. Способ контроля при помощи поста оптического контроля сосудов, опирающихся своим дном (4) на опорный стол, при этом способ содержит следующие этапы, на которых:
- последовательно располагают сосуды (3) на подвижной плите (8) опорного стола, на которую опирается дно сосуда во время операции контроля при помощи указанного поста, будучи расположенным между источником (14) света и датчиком (15) света;
- последовательно перемещают сосуды (3) за пределы поста (2) контроля по завершении операции контроля,
отличающийся тем, что:
- сосуд (3) располагают относительно по меньшей мере одной части (18) подвижной плиты (8), которая является подвижной и находится перед доставкой сосуда на пост контроля в переходном положении, в котором эта подвижная часть находится на одном уровне со столом;
- опускают перед операцией контроля эту подвижную часть (18) в положение контроля, в котором эта подвижная часть (18) отстоит от дна (4) сосуда, по меньшей мере часть которого находится на расстоянии от подвижной плиты так, чтобы датчик (15) мог принимать пучок световых лучей, распространяющихся в контрольном объеме, в котором находится по меньшей мере часть дна сосуда, находящаяся на расстоянии от подвижной плиты;
- удерживают подвижную часть (18) в ее положении контроля во время операции контроля;
- после операции контроля и перед перемещением сосуда за пределы поста контроля подвижную часть (18) перемещают в ее переходное положение.
11. Способ контроля по п. 10, отличающийся тем, что две подвижные части (18) подвижной плиты вертикально опускают в положение контроля, в котором две симметричные части дна сосуда располагаются на расстоянии от подвижной плиты.
12. Способ контроля по п. 10 или 11, отличающийся тем, что во время операции контроля обеспечивают вращение сосуда (3) вокруг его вертикальной оси по меньшей мере на один оборот.
13. Способ контроля по п. 11, отличающийся тем, что во время операции контроля обеспечивают вращение сосуда (3) вокруг его вертикальной оси по меньшей мере на один оборот, при этом во время вращения сосуда датчик (15) света принимает пучки световых лучей, распространяющихся в контрольных объемах (V), в которых расположены по меньшей мере две симметричные части дна сосуда, отошедшие от подвижной плиты, и анализируют пучки принимаемых световых лучей с целью обнаружения дефекта ортогональности дна относительно оси симметрии сосуда.
14. Способ контроля по одному из пп. 10-12, отличающийся тем, что в качестве датчика (15) света используют датчик изображений и располагают источник (14) света и датчик (15) изображений относительно подвижной части (18) подвижной плиты так, чтобы в положении контроля подвижной части датчик (15) мог снимать изображение профиля по меньшей мере утора (6) и соседней части дна (4) сосуда, находящейся на расстоянии от подвижной плиты.
| FR 1398392 A, 07.05.1965 | |||
| СПОСОБ ПОЛУЧЕНИЯ ХЛЕБНОГО КВАСА | 2015 |
|
RU2584307C1 |
| JP 2005091060 A, 07.04.2005 | |||
| WO 2014096680 A1, 26.06.2014. | |||

