Изобретение относится к измерительной технике, автоматике, и может быть использовано при создании высокоточных аналого-цифровых преобразователей и систем контроля параметров изделий электронной техники. Техническим результатом является то, что гибридные датчики позволяют значительно уменьшить погрешность измерения углового положения даже при использовании в своем составе относительно грубых цифровых и аналоговых датчиков. Это также позволяет применять датчики меньших габаритных размеров и цифровые датчики углового положения меньшей разрядности.
При разработке систем автоматического управления летательным аппаратом неизбежно возникает вопрос выбора датчиков углового положения различных объектов: органов управления, рулевых поверхностей и т.п. В настоящее время существует устойчивая тенденция перехода от аналоговых к цифровым датчикам, при этом одной из основных проблем остается необходимость обеспечения заданной точности датчика.
В системах автоматики аналоговые датчики (АД) углового положения в чистом виде применяются относительно редко, чаще они применяются в комплексе с аналого-цифровым преобразователем выходного сигнала. Такое комплексирование позволяет значительно упростить обработку выходного сигнала в современных цифровых вычислительных системах. При этом основным недостатком аналоговых датчиков углового положения остается относительно высокая зависимость выходного сигнала от внешних воздействий: температуры, влажности, давления и т.д.
Цифровые датчики (ЦД) углового положения значительно меньше подвержены влиянию внешней окружающей среды, но имеют свои характерные недостатки:
- инкрементные датчики углового положения пока не нашли применения в авиации, т.к. при пропадании и последующем восстановлении электропитания невозможно определить текущее угловое положение объекта;
- абсолютные датчики углового положения при повышенной разрядности (точности) имеют относительно большие габариты, в силу чего возникают сложности при организации резервирования каналов получения информации о текущем угловом положении.
В изобретении предлагается гибридный датчик измерения углового положения, имеющий в своем составе и аналоговый и цифровой датчики углового положения, связанные определенным образом как конструктивно, так и алгоритмически с целью получения единого выходного сигнала.
Известны датчики преобразования угла поворота вала в код по а.с. 1181135 (СССР) и по а.с. 1786662 (СССР), основанные на том, что вал датчика поворачивают на равномерно расположенные углы в диапазоне преобразования, преобразуют угол поворота вала в сигналы, определяют амплитуды и фазы пространственных гармоник погрешности преобразования, формируют поправки и затем формируют выходной код угла.
Известно устройство для измерения угловых перемещений RU 2313764 С1, 27.12.2007, МПК: G01B 7/30, содержащее формирователь синусоиды, трансформаторный датчик угла, дифференциальный усилитель, устройство выборки-хранения, аналого-цифровой преобразователь регистр данных, блок управления и синхронизации и генератор.
Недостатком этих устройств является погрешность, обусловленная напряжением смещения измеряемого напряжения.
Наиболее близким к изобретению по технической сущности и достигаемому результату является преобразователь угла поворота вала в код, патент РФ 2310984, МПК Н03М 1/64, опубликован 20.11.2007 г., принятый за прототип и содержащий три синусно-косинусных трансформаторных датчика, коммутатор, интеграторы, функциональный преобразователь отношения напряжений в код, пороговые элементы, элементы И-НЕ, формирователь времени интегрирования, счетчик, триггер и формирователь сигнала исходного состояния, причем формирователь времени интегрирования содержит элемент НЕ, генератор импульсов, счетчик-распределитель и триггер.
Недостатком известного преобразователя является низкое быстродействие, обусловленное тем, что на преобразование (интегрирование, кодирование и подготовку (обнуление) интеграторов к следующему циклу интегрирования) каждого из входных параметров затрачивается время, равное периоду входных сигнальных напряжений.
Целью изобретения является уменьшение погрешности измерения углового положения объекта при использовании в своем составе относительно грубых цифровых и аналоговых датчиков углового положения, и как следствие, уменьшение массогабаритных параметров датчика.
Гибридный датчик измерения углового положения, включающий в себя аналоговый датчик углового положения, дополнительно содержит цифровой датчик углового положения, расположенный на одном валу с аналоговым датчиком углового положения, аналого-цифровой преобразователь и вычислитель; выход аналогового датчика углового положения соединен с входом аналого-цифрового преобразователя, выход аналого-цифрового преобразователя соединен с первым входом вычислителя; выход цифрового датчика углового положения соединен со вторым входом вычислителя; вычислитель производит расчет углового положения вала используя значения сигнала от аналогового датчика углового положения поступающего через аналого-цифровой преобразователь и значение сигнала цифрового датчика углового положения по формуле

где γ - угловое положение вала;
βа, βц, - сигналы аналогового и цифрового датчиков углового положения соответственно; b1i, ki - поправочные коэффициенты для каждого i-го кванта цифрового датчика углового положения  определяемые в процессе предварительной тарировки гибридного датчика углового положения и хранимые в памяти вычислителя; с выхода вычислителя снимают значение углового положения вала.
определяемые в процессе предварительной тарировки гибридного датчика углового положения и хранимые в памяти вычислителя; с выхода вычислителя снимают значение углового положения вала.
Сущность изобретения поясняется четырьмя рисунками, при помощи которых поясняется принцип работы заявляемого устройства. На Фиг. 1. - представлена структурная схема гибридного датчика измерения углового положения, на Фиг. 2 - представлены выходные характеристики ЦД и АД, наФиг.2 - приведены параметры калибровки первого кванта ЦД, на Фиг. 4 - представлены результаты математического моделирования.
Устройство содержит аналоговый датчик углового положения 1, цифровой датчик углового положения 2, аналогово-цифровой преобразователь 3, вычислитель 4.
Описание принципа работы гибридного датчика углового положения приведем ниже.
Основной принцип при создании гибридного датчика углового положения заключается в использовании различных подходов к измерению углового положения и «жесткой» синхронизации аналогового и цифрового датчиков в диапазоне измерения. В качестве варианта «жесткой» синхронизации можно рассмотреть конструкцию гибрида, в которой кодовый диск цифрового датчика и аналоговый датчик размещены на одном валу и их диапазоны измерения совмещены (Фиг. 1).
Датчики, входящие в состав гибрида, имеют различные подходы к измерению углового положения, поэтому моделирование и анализ выходных характеристик датчиков удобно производить в прямоугольной декартовой системе координат «заданное угловое положение - измеренное угловое положение». Это позволяет уйти от рассмотрения физических явлений, происходящих в датчиках и параметров их описывающих.
К датчикам углового положения из состава гибрида предъявляются следующие требования:
- выходная характеристика АД должна быть монотонно возрастающей пропорционально угловому положению;
- выходная характеристика АД не должна иметь разрывов в пределах диапазона определения углового положения;
- выходная характеристика АД может иметь разрыв на границах измерения, например, в точке 0 (2π);
- максимальная точность ЦД в точках изменения кода.
Для примера рассмотрим гибридный датчик углового положения, имеющий в своем составе цифровой и аналоговый датчики углового положения с выходными характеристиками, соответственно, βц(α) и βа(α) (Фиг. 2). Выходные характеристики совмещены в диапазоне измерения (0 - 2π).
Как видно из Фиг. 2, выходная характеристика βа(α) аналогового датчика углового положения удовлетворяет ранее предъявленным требованиям. При этом заметим, что характеристика имеет следующие недостатки:
- разная степень кривизны на различных участках характеристики;
- имеются разрывы (смещение характеристики) при α=0 и α=2π;
- величины смещений характеристики при α=0 и α=2π не равны.
Цифровой датчик углового положения - двоичный, имеет минимально требуемую разрядность nр=2 и следовательно имеет число угловых положений (квантов) N равное

В качестве прототипа использовалась математическая модель однодорожечного двоичного цифрового датчика на основе Т-последовательности T(2,2)={0011}[1]. Информация о кодах датчика углового положения представлена в Таблице 1.
Рассмотрим фрагмент алгоритма калибровки на примере первого кванта цифрового датчика углового положения (Фиг. 3).
В процессе вращения вала гибридного датчика углового положения, при появлении сигнала о смене кода цифрового датчика углового положения, вычислитель фиксирует значение угла βа аналогового датчика. Т.е. фиксируются значения аналогового датчика углового положения (b11, b21) на границах кванта ЦД.
По известным значениям b11, b21 вычислитель рассчитывает коэффициент угла наклона хорды [b11, b21] выходной характеристики аналогового датчика для текущего кванта цифрового датчика углового положения

где  - угловая величина кванта цифрового датчика.
- угловая величина кванта цифрового датчика.
Выполняя вращение вала гибридного датчика во всем диапазоне измерения α∈[0, 2π], получаем массив значений поправочных коэффициентов (b1i, ki) для каждого i-го кванта  Полученный массив заносится в память вычислителя. Процесс калибровки завершен.
Полученный массив заносится в память вычислителя. Процесс калибровки завершен.
Роль поправочных коэффициентов, полученных в процессе калибровки, заключается в следующем.
Параметр b1i позволяет привести начало участка выходной характеристики аналогового датчика в диапазоне i-кванта к значению цифрового датчика в данном кванте (смещение участка выходной характеристики АД).
Коэффициент ki учитывает поправку требуемого наклона хорды выходной характеристики аналогового датчика для приведения к углу наклона, равному единице, что соответствует углу наклона идеального датчика углового положения (Фиг. 3).
Следовательно, поправочные коэффициенты b1i, ki позволяют синхронизировать показания аналогового датчика и цифрового датчика в точках смены кода ЦД.
В общем случае, для любого i-го кванта цифрового датчика можно определить значение углового положения вала γ

где  - коэффициент наклона хорды выходной характеристики АД.
- коэффициент наклона хорды выходной характеристики АД.
Таким образом, в процессе работы гибридный датчик углового положения используя значения сигналов βц, βа цифрового и аналогового датчиков соответственно, с учетом поправочных коэффициентов b1i, ki, вычисляет значение текущего углового положения γ.
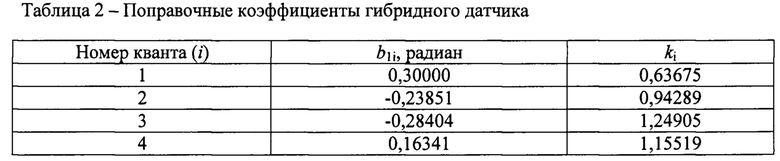
Для исходных данных (Фиг. 3) полученные поправочные коэффициенты приведены в Таблице 2, результаты математического моделирования работы гибридного датчика углового положения представлены на Фиг. 4.
На Фиг. 4 представлены результаты математического моделирования работы гибридного датчика углового положения с исходными выходными характеристиками аналогового датчика углового положения (Фиг. 2).
В процессе моделирования вычислялась абсолютная погрешность для выходной характеристики аналогового датчика до выполнения калибровки, а также абсолютная погрешность для выходной характеристики гибридного датчика. Погрешность вычислялась относительно характеристики идеального датчика (Фиг. 4).
Анализ результатов моделирования, показывает, что, если выходная характеристика аналогового датчика удовлетворяет описанным ранее требованиям, то независимо от ее кривизны и формы выходная характеристика гибридного датчика имеет значительно меньшую абсолютную погрешность. Что подтверждает правильность выбранного подхода к гибридизации датчиков углового положения.
Таким образом, гибридные датчики позволяют значительно уменьшить погрешность измерения углового положения даже при использовании в своем составе относительно грубых цифровых и аналоговых датчиков. А это в свою очередь позволяет уменьшить размеры гибридного датчика, применяя аналоговые и цифровые датчики углового положения меньших габаритных размеров.
Процесс калибровки гибридного датчика углового положения не требует сложного стендового оборудования, так как необходимо выполнить только синхронизацию диапазонов измерения цифрового и аналогового датчиков. Отпадает необходимость использования внешнего эталонного датчика углового положения, т.к. роль калибрующего устройства выполняет цифровой датчик углового положения. Дополнительным преимуществом является возможность снижения разрядности цифрового датчика для обеспечения требуемой точности считывания угла.
Устройство может быть использовано при решении инженерно-технических задач, связанных с необходимостью измерения углов отклонения ручек управления и рулевых органов изменения аэродинамики летательных аппаратов.
Литература
1. Цацин А.А. Метод формирования Т-последовательностей для однокоординатных цифровых датчиков перемещений // Материалы IV научно-практической конференции памяти О.В. Успенского [Тескт] / Сборник докладов, - М.: Издательский дом Академии Н.Е. Жуковского, 2017. С. 54-60.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гибридный способ измерения углового положения | 2019 |
|
RU2714591C1 |
| СПОСОБ И УСТРОЙСТВО ИМИТАЦИИ РАДИОЛОКАЦИОННОГО СИГНАЛА МОНОИМПУЛЬСНОЙ РЛС | 2008 |
|
RU2391682C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ЦЕЛЕЙ В МОНОИМПУЛЬСНОЙ ОБЗОРНОЙ РЛС И МОНОИМПУЛЬСНАЯ ОБЗОРНАЯ РЛС | 2004 |
|
RU2270458C1 |
| Устройство аналого-цифрового преобразования | 1991 |
|
SU1807559A1 |
| ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 2013 |
|
RU2541856C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТИ АМПЛИТУДНЫХ ЦИФРОВЫХ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА СЛЕДЯЩЕГО ТИПА | 2004 |
|
RU2269867C1 |
| Датчик положения ротора | 2023 |
|
RU2816167C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2073835C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057310C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ РОТОРНЫХ МЕХАНИЗМОВ | 1992 |
|
RU2057309C1 |




Изобретение относится к измерительной технике, автоматике и может быть использовано при создании высокоточных аналого-цифровых преобразователей, датчиков перемещений и систем контроля параметров изделий электронной техники. Техническим результатом является уменьшение погрешности измерения углового положения. Устройство содержит аналоговый датчик углового положения, цифровой датчик углового положения, расположенный на одном валу с аналоговым датчиком углового положения, аналого-цифровой преобразователь и вычислитель. 4 ил., 2 табл.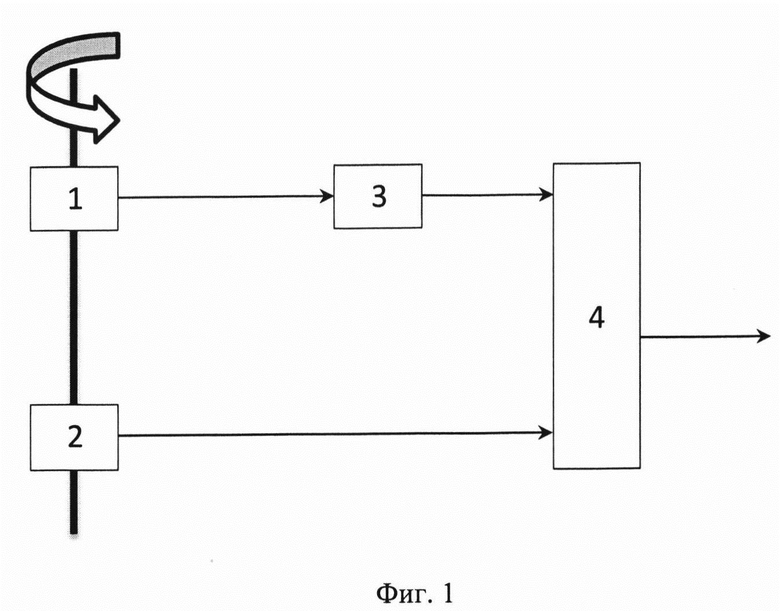
Гибридный датчик измерения углового положения, включающий в себя аналоговый датчик углового положения, отличающийся тем, что дополнительно содержит цифровой датчик углового положения, расположенный на одном валу с аналоговым датчиком углового положения, аналого-цифровой преобразователь и вычислитель; выход аналогового датчика углового положения соединен с входом аналого-цифрового преобразователя, выход аналого-цифрового преобразователя соединен с первым входом вычислителя; выход цифрового датчика углового положения соединен со вторым входом вычислителя; вычислитель производит расчет углового положения вала, используя значения сигнала от аналогового датчика углового положения, поступающего через аналого-цифровой преобразователь, и значение сигнала цифрового датчика углового положения, по формуле
где γ - угловое положение вала;
βа, βц, - сигналы аналогового и цифрового датчиков углового положения соответственно; b1i, ki - поправочные коэффициенты для каждого i-го кванта цифрового датчика углового положения  определяемые в процессе предварительной тарировки гибридного датчика углового положения и хранимые в памяти вычислителя; с выхода вычислителя снимают значение углового положения вала.
определяемые в процессе предварительной тарировки гибридного датчика углового положения и хранимые в памяти вычислителя; с выхода вычислителя снимают значение углового положения вала.
| СПОСОБ ПРЕОБРАЗОВАНИЯ УГЛА ПОВОРОТА ВАЛА В КОД | 2003 |
|
RU2235422C1 |
| ПРЕОБРАЗОВАТЕЛЬ УГЛА ПОВОРОТА ВАЛА В КОД | 2006 |
|
RU2310984C1 |
| RU 2071174 C1, 27.12.1996 | |||
| US 5119302 A, 02.06.1992 | |||
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |

