Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением поезда для определения и контроля позиции поезда на пути.
Известна система контроля местоположения поездов в составе станционного устройства для системы регулирования движения поездов, содержащего блок управления, связанный с устройствами систем автоматической блокировки и электрической централизации, радиомодем, приемник спутниковой навигации, блок трансмиссии данных, состоящий из двух соединенных между собой микропроцессорных модулей, два блока межстанционного обмена данными, двухканальный блок контроля объектов станции и коммутатор, при этом первый выход/вход первого микропроцессорного модуля подключен к первому блоку межстанционного обмена данными, а первый выход/вход второго микропроцессорного модуля подключен ко второму блоку межстанционного обмена данными, второй выход/вход первого микропроцессорного модуля подключен к первому входу двухканального блока контроля объектов станции, второй выход/вход второго микропроцессорного модуля подключен ко второму входу/выходу двухканального блока контроля объектов станции, приемник спутниковой навигации соединен через коммутатор с входами микропроцессорных модулей, третьи выходы/входы которых соединены с входами/выходами блока управления, а четвертый выход/вход первого микропроцессорного модуля подключен к радиомодему (RU 2492090, B61L 23/34, 10.09.2013).
Местоположение поезда на пути перегона и станции определяется по состоянию рельсовых цепей с использованием сигналов от устройств систем автоматической автоблокировки и электрической централизации.
Недостатком известной системы является зависимость работы рельсовых цепей от погодных условий, изменяющих величину электрического сопротивления балласта, что обуславливает отказы в путевом оборудовании, приводящие к запрещающему показанию локомотивного светофора, а также влияет на точность определения наличия поезда. Кроме того, эксплуатация путевого оборудования требует значительных затрат.
В качестве прототипа принята система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а также установленные в центре управления сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении вагонов поезда, при этом вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера (RU 2560227, B61L 23/34, 20.08.2015).
Недостатком известной системы является ограниченность функциональных возможностей, обусловленная тем, что рефлектограмма распределения акустического воздействия по всей длине волокна не обладает достаточной информативностью для достоверного выделения из шумового следа поездов шумовых следов от отдельных колесных пар и вагонов. Это снижает возможности по контролю полносоставности поездов, и точности определения скорости, ускорения и координат местоположения составов на рельсовом пути для целей безопасного и эффективного интервального регулирования движения поездов.
Технический результат изобретения заключается в расширении функциональных возможностей системы и в повышении надежности ее функционирования.
Технический результат достигается тем, что в системе контроля местоположения поездов, содержащей бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а также установленные в центре управления сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении вагонов поезда, при этом вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера, согласно изобретению каждое определенное место внешней оболочки волоконно-оптического кабеля, координаты которого известны, механически соединено с рельсом железнодорожного пути посредством элемента, обеспечивающего передачу вибраций.
Блок формирования данных о местоположении вагонов поезда состоит из последовательно соединенных модулей предиктора, первого контура адаптации, корректора, идентификатора и второго контура адаптации, выход которого и второй выход модуля идентификатора соединены с соответствующими входами модуля сравнения, при этом вход модуля предиктора, дополнительный вход модуля сравнения и его выход являются соответственно первым входом, вторым входом и выходом блока формирования данных о местоположении вагонов поезда.
Часть элементов, обеспечивающих передачу вибраций, могут быть расположены рядом с проводниками заземления опор линии продольного энергоснабжения на рельсы.
Часть элементов, обеспечивающих передачу вибраций, могут быть расположены рядом с рельсовым стыковым соединением.
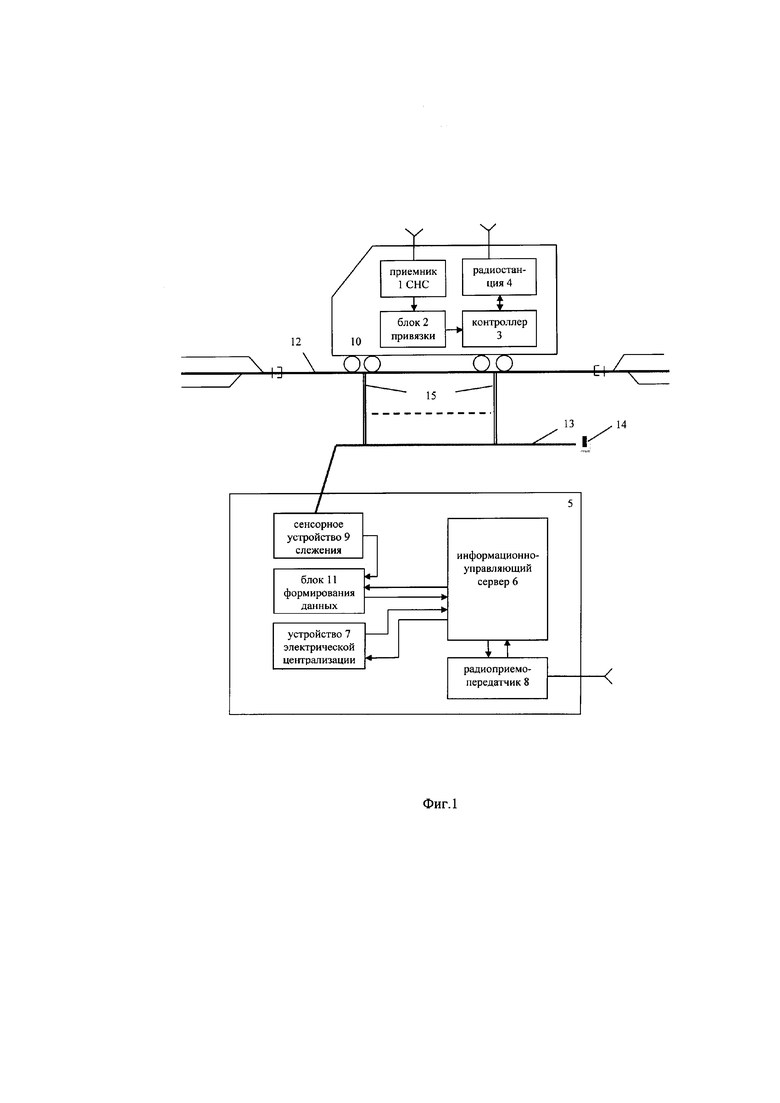
На чертеже (фиг. 1) приведена схема системы контроля местоположения поездов. На фиг. 2 приведена схема блока формирования данных о местоположении вагонов поезда.
Система контроля местоположения поездов содержит бортовой приемник 1 спутниковой навигационной системы, выход которого через блок 2 привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером 3, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции 4, и установленный в центре 5 управления информационно-управляющий сервер 6, первый вход и первый выход которого соединены соответственно с выходом и входом устройства 7 электрической централизации, второй вход и второй выход информационно-управляющего сервера 6 соединены соответственно с выходом и входом стационарного радиоприемопередатчика 8, а также установленные в центре 5 управления сенсорное устройство 9 слежения за передвижением поезда 10 по перегону и блок 11 формирования данных о местоположении вагонов поезда 10, при этом вдоль железнодорожного пути 12 на заданном расстоянии от него проложен волоконно-оптический кабель 13 с герметичной заглушкой 14 и соединен с входом/выходом сенсорного устройства 9 слежения за передвижением поезда 10 по перегону, дополнительный выход которого соединен с первым входом блока 11 формирования данных о местоположении вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера 6, каждое определенное место внешней оболочки волоконно-оптического кабеля 13, координаты которого известны, механически соединено с рельсом железнодорожного пути 12 посредством элемента 15, обеспечивающего передачу вибраций.
Блок 11 формирования данных о местоположении вагонов поезда состоит из последовательно соединенных модуля 16 предиктора, модуля 17 первого контура адаптации, модуля 18 корректора, модуля 19 идентификатора и модуля 20 второго контура адаптации, выход которого и второй выход модуля 19 идентификатора соединены с соответствующими входами модуля 21 сравнения, при этом вход модуля 16 предиктора, дополнительный вход модуля 21 сравнения и его выход являются соответственно первым входом, вторым входом и выходом блока 11 формирования данных о местоположении вагонов поезда.
Система контроля местоположения поезда работает следующим образом.
Местоположение поезда 10 на рельсах железнодорожного пути 12 обнаруживается локационным методом, осуществляемым установленным в центре 5 управления сенсорным устройством 9 слежения за передвижением поездов (рефлектометром). Вход/выход сенсорного устройства 9 слежения за передвижением поездов посредством входящего в его состав оптического блока (на чертеже не показан) соединен с волоконно-оптическим кабелем 13, который является распределенным чувствительным элементом - стандартным телекоммуникационным одномодовым волокном. Когерентный источник излучения, входящий в состав рефлектометра (на чертеже не показан), вводит в волоконно-оптический кабель 13 с герметичной заглушкой 14 от одного выхода сенсорного устройства 9 слежения за передвижением поезда периодические короткие оптические импульсы (длина импульса зависит от длины кабеля). Отраженные световые импульсы, на которые оказывают влияние механические колебания оболочки волоконно-оптического кабеля 13, поступают на вход сенсорного устройства 9 и регистрируется фотодетектором рефлектометра. Результирующий сигнал в виде рефлектограммы распределения вибрационного воздействия по всей длине оптоволокна передается с другого выхода сенсорного устройства 9 по интерфейсу программного обеспечения Ethernet на первый вход блока 11 формирования данных о местоположении вагонов поезда. Блоком 11 формирования данных о местоположении вагонов поезда по разности рефлектограмм в отсутствии поезда и рефлектограмм при наличии поезда с точностью ±3 метра определяются в режиме реального времени места воздействия колесных пар на оптическое волокно. При этом блок 11 контролирует целостность подвижного состава и параметры его движения. Функционирование блока 11 по контролю передвижения поезда начинается с момента поступления на его второй вход сигнала старта с третьего выхода информационно-управляющего сервера 6. Сигнал старта формируется информационно-управляющим сервером 6, например, при открытии выходного светофора для выхода поезда на перегон. В блоке 11, для формирования данных о местоположении вагонов поезда, используются различные математические модели, в том числе метод наименьших квадратов (МНК) К.Гаусса и фильтр Калмана для формирования и определения новых признаков воздействия колесных пар вагонов на фоне распределенных шумов, для чего каждый входной сигнал подвергается адаптивной фильтрации с целью выделения совокупности информационных признаков, в том числе:
- оценки текущего среднего;
- оценки скорости изменения текущего среднего;
- ковариационной матрицы погрешностей оценок;
- оценки амплитуды формирующего шума;
- оценки мощности (дисперсии) формирующего шума,
с целью определения значений амплитудных уровней определенных признаков воздействия колесных пар на оптоволокно, и последующего сравнения значений амплитудных уровней полученных оценок текущего воздействия колесных пар вагонов на оптоволокно на участке с записанными контрольными значениями амплитудных уровней определенных признаков без оказания воздействия на оптоволокно подвижным составом на том же участке. В процессе функционирования, измерительная информация с выхода блока 9 поступает на вход блока 11, где:
1) модуле 16 предиктора осуществляется прогнозирование состояния сигнала, формируемого оптоволокном и его ковариационной матрицы (предиктора):


где 






2) в модуле 17 формируется первый контур адаптации:

где 




3) в модуле 18 вводится корректор:

4) в модуле 19 используется идентификатор:



где 


на выходе которого появляются оценки среднего и скорости изменения среднего, поступающие на вход модуля 21 для сравнения с имеющимися на втором входе контрольными оценками среднего и скорости изменения среднего без воздействия подвижного состава на оптоволокно подвижного состава и на модуль 20;
5) в модуле 20 формируется второй контур адаптации:

на выходе которого появляются оценки мощности воздействия на оптоволокно и дисперсии помехи, далее поступающие на модуль 21 для сравнения с имеющимися на втором входе контрольными оценками мощности воздействия и дисперсии помехи без оказания воздействия на оптоволокно подвижного состава.
В результате примененных процедур происходит:
а) раскрытие неопределенности о дисперсии случайной помехи во входном сигнале;
б) выделение полезного сигнала из зашумленных результатов измерений для возможных реализаций - с учетом физических принципов функционирования оптоволокна;
в) получение дополнительных оценок, характеризующих контролируемый процесс, в том числе:
- оценка текущего среднего;
- оценка скорости изменения текущего среднего;
- ковариационные матрицы оценок;
- оценка амплитуды формирующего шума;
- оценка мощности (дисперсии) формирующего шума;
г) определение значений полученных дополнительных оценок;
д) сравнение в модуле 21 полученных значений дополнительных оценок с ранее записанными контрольными значениями дополнительных оценок без оказания воздействия на оптоволокно подвижным составом на том же участке, и формирование на выходе решения о местоположении вагонов поезда, целостности подвижного состава и скорости его движения.
С выхода блока 11 данные о местоположении вагонов поезда и целостности подвижного состава, скорости его движения и т.п.по интерфейсу RS-485 передаются на третий вход информационно-управляющего сервера 6. Программным обеспечением информационно-управляющего сервера 6 информация о передвижении поезда привязывается к плану перегона для отображения на мониторе оператора центра 5 управления передвижения поезда по перегону. С использованием информации о местоположении поезда информационно-управляющий сервер 6 формирует сообщение о поездной ситуации на перегоне.
Информация от бортового приемника 1 спутниковой навигационной системы (приемника СНС) поступает через блок 2 привязки географических координат к трассе железнодорожной линии в бортовой контроллер 3 и затем через выход бортового контроллера 3 на вход локомотивной радиостанции 4. От локомотивной радиостанции 4 информация о местоположении поезда передается в стационарный радиоприемопередатчик 8. По интерфейсу RS-485 она поступает на второй вход информационно-управляющего сервера 6, где сопоставляется с аналогичной информацией от блока 11 формирования данных о местоположении вагонов поезда для использования системами управления движением поездов.
По сигналам о состоянии объектов на станции, включающим, например, данные о номере маршрута, состоянии станционных секций, переданным по интерфейсу RS-485 от устройств 7 ЭЦ на первый вход информационно-управляющего сервера 6, информационно-управляющий сервер 6 формирует сообщение о поездной ситуации на станции. Сформированные сообщения (управляющие команды по движению) со второго выхода информационно-управляющего сервера 6 поступают по интерфейсу RS-485 в стационарный радиоприемопередатчик 8 для передачи их по радиоканалу на локомотивную радиостанцию 4. С выхода локомотивной радиостанции 4 управляющие команды по движению поступают в бортовой контроллер 3, который обеспечивает отображение управляющих команд движения на информационном табло машиниста (на чертеже не показано) для принятия решений по управлению движением поезда.
Механическое соединение внешней оболочки волоконно-оптического кабеля 13 в определенных местах, координаты которых известны, с рельсом железнодорожного пути посредством элементов 15, обеспечивающих передачу вибраций, обуславливает появление в рефлектограмме локальных максимумов отраженного сигнала, соответствующих моментам времени прохождения колесных пар вагонов над местами крепления элементов 15 к рельсам железнодорожного пути 12. Световые сигналы обусловленные вибрациями, которые передаются от рельсов железнодорожного пути 12 на оболочку волоконно-оптического кабеля 13 через элементы 15, которые обеспечивают хорошую передачу вибраций, позволяют надежно извлечь из рефлектограмм информацию о прохождении отдельных колесных пар вагонов. Обработка этих данных позволяет блоку 11 формирования данных получить дополнительные и более достоверные данные реального времени о текущих координатах колесных пар вагонов, в привязке к топологической карте рельсового пути, а затем вычислить скорость и направление движения вагонов и проконтролировать количество осей в движущихся составах. Для обработки дополнительной информации, связанной с введением элементов, передающих вибрацию на определенные места внешней оболочки волоконно-оптического кабеля 13 внесены изменения в программное обеспечение блока 11 формирования данных. В целом, все изменения не требуют существенных дополнительных расходов на модернизацию и эксплуатацию системы с расширенными функциональными возможностями и надежным ее функционированием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| Система контроля местоположения поезда | 2018 |
|
RU2675041C1 |
| Система контроля местоположения поезда на станции | 2020 |
|
RU2737811C1 |
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2746629C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2018 |
|
RU2685109C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2770040C1 |

Система контроля местоположения поездов содержит бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а также установленные в центре управления сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении вагонов поезда, при этом вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера. Каждое определенное место внешней оболочки волоконно-оптического кабеля, координаты которого известны, механически соединено с рельсом железнодорожного пути посредством элемента, обеспечивающего передачу вибраций. Обеспечиваются расширение функциональных возможностей системы и повышение надежности ее функционирования. 2 з.п. ф-лы, 2 ил.
1. Система контроля местоположения поездов, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а также установленные в центре управления сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении вагонов поезда, при этом вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера, отличающаяся тем, что каждое определенное место внешней оболочки волоконно-оптического кабеля, координаты которого известны, механически соединено с рельсом железнодорожного пути посредством элемента, обеспечивающего передачу вибраций, а блок формирования данных о местоположении вагонов поезда состоит из последовательно соединенных модулей предиктора, первого контура адаптации, корректора, идентификатора и второго контура адаптации, выход которого и второй выход модуля идентификатора соединены с соответствующими входами модуля сравнения, при этом вход модуля предиктора, дополнительный вход модуля сравнения и его выход являются соответственно первым входом, вторым входом и выходом блока формирования данных о местоположении вагонов поезда.
2. Система контроля местоположения поездов по п.1, отличающаяся тем, что часть элементов, обеспечивающих передачу вибраций, расположены рядом с проводниками заземления опор линии продольного энергоснабжения на рельсы.
3. Система контроля местоположения поездов по п.1, отличающаяся тем, что часть элементов, обеспечивающих передачу вибраций, расположены рядом с рельсовым стыковым соединением.
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2608783C2 |
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| US 5330136 A, 19.07.1994 | |||
| US 20150166087 A1, 18.06.2015. | |||

