Изобретение относится к области железнодорожной автоматики и телемеханики, предназначено для определения и контроля позиции поезда на пути и может быть использовано в системах интервального регулирования движения поездов по сигналам АЛС с передачей данных по цифровому радиоканалу.
Известно используемое в системе управления движением поезда техническое решение, в котором местоположение поезда определяется без применения на пути оборудования рельсовых цепей. В известном техническом решении бортовой GPS приемник спутниковой навигационной системы через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединен с локомотивной радиостанцией, которая передает данные о местоположении поезда по радиоканалу на стационарный радиоприемопередатчик (центральный коммутатор системы радиосвязи), установленный в центре управления и связанный с информационно-управляющим сервером, который соединен с другими информационно-управляющими системами, например, с устройствами системы электрической централизации (RU 2419569, B61L 25/02, 27.05.11).
Недостатком известного технического решения является зависимость определения местоположения поезда от безотказного функционирования поездных средств определения целостности поезда, которая приводит к снижению безопасности движения на участке железнодорожного пути.
В качестве прототипа принята система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, в центре управления установлены сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера. (RU 2560227, B61L 25/02, 20.08.15).
К недостатку известной системы контроля местоположения поезда следует отнести невысокую точность определения занятости путевых участков, которая обусловлена тем, что отраженный оптический сигнал (рефлектограмма) распределения акустического воздействия по всей длине оптоволокна, поступающий с выхода сенсорного устройства непосредственно на первый вход блока формирования данных о местоположении головного и хвостового вагонов поезда представляет собой смесь сигналов, относящихся не только к виброаккустическому воздействию на оптоволокно от контролируемого поезда, но и к посторонним источникам виброаккустического воздействия на это же оптоволокно. Кроме того, уровень этого сигнала подвержен влиянию нестабильностей коэффициентов передачи в трактах преобразования виброаккустического воздействия в оптические сигналы из-за влияния на характеристики оптоволокна переменных климатических факторов и отклонений от проектных значений реальных расстояний участков оптоволоконного кабеля от соответствующих контролируемых ими участков рельсового пути. В результате чего, в известной системе границы и параметры движения поезда определяются с большой погрешностью и поезда приходится разграничивать увеличенными интервалами попутного следования, что снижает предельную пропускную способность системы. Также на поездах необходим контроль целостности состава из-за невозможности фиксации случаев отцепа вагонов на перегоне.
Не достаточный объем данных о параметрах движения поездов и данных об их достоверности, который поступает в аппаратуру электрической централизации от известной системы, снижает возможность по комплексному использованию этих данных вместе с сопоставимыми данными от других подсистем управления движением поездов для целей многоуровневого резервирования функций управления движением и, соответственно, для общего повышения надежности и безопасности управления движением поездов.
Технический результат изобретения заключается в повышении точности данных о местоположении головного и хвостового вагонов, а также целостности поезда за счет измерения числа осей и вагонов поездов на въезде и выезде из участков пути.
Технический результат изобретения достигается тем, что в системе контроля местоположения поезда, содержащей бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии соединен с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, центр управления движением поездов, в котором установлены информационно-управляющий сервер, устройство электрической централизации, стационарный радиоприемопередатчик, сенсорное устройство слежения за движением поездов по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, при этом первый вход и первый выход информационно-управляющего сервера соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а третий вход и третий выход информационно-управляющего сервера соединены соответственно с первым выходом и первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, вход/выход сенсорного устройства слежения за передвижением поезда по перегону подключен к волоконно-оптическому кабелю с герметичной заглушкой, проложенному вдоль пути на заданном расстоянии, согласно изобретению в центре управления движением поездов установлены последовательно соединенные модуль накопления данных рефлектограмм, модуль преобразования Фурье, модуль фильтрации шумов, модуль построения траекторий головы и хвоста поезда, модуль определения интервала времени нахождения поезда в рассматриваемой координате пути, модуль накопления данных о количестве осей и вагонов, преследующих границы участков пути, и модуль определения состояния свободности/занятости участков пути, второй выход модуля фильтрации шумов через первый модуль фильтра Гаусса соединен с первым модулем вычисления количества локальных максимумов, выход которого соединен со вторым входом модуля накопления данных о количестве осей и вагонов, а третий выход модуля фильтрации шумов через второй модуль фильтра Гаусса соединен со вторым модулем вычисления количества локальных максимумов, выход которого соединен с третьим входом модуля накопления данных о количестве осей и вагонов, при этом вход модуля накопления данных рефлектограмм подключен к дополнительному выходу сенсорного устройства слежения за движением поездов по перегону, а выход модуля определения состояния свободности/занятости участков пути соединен со вторым входом блока формирования данных о местоположении головного и хвостового вагонов поезда.
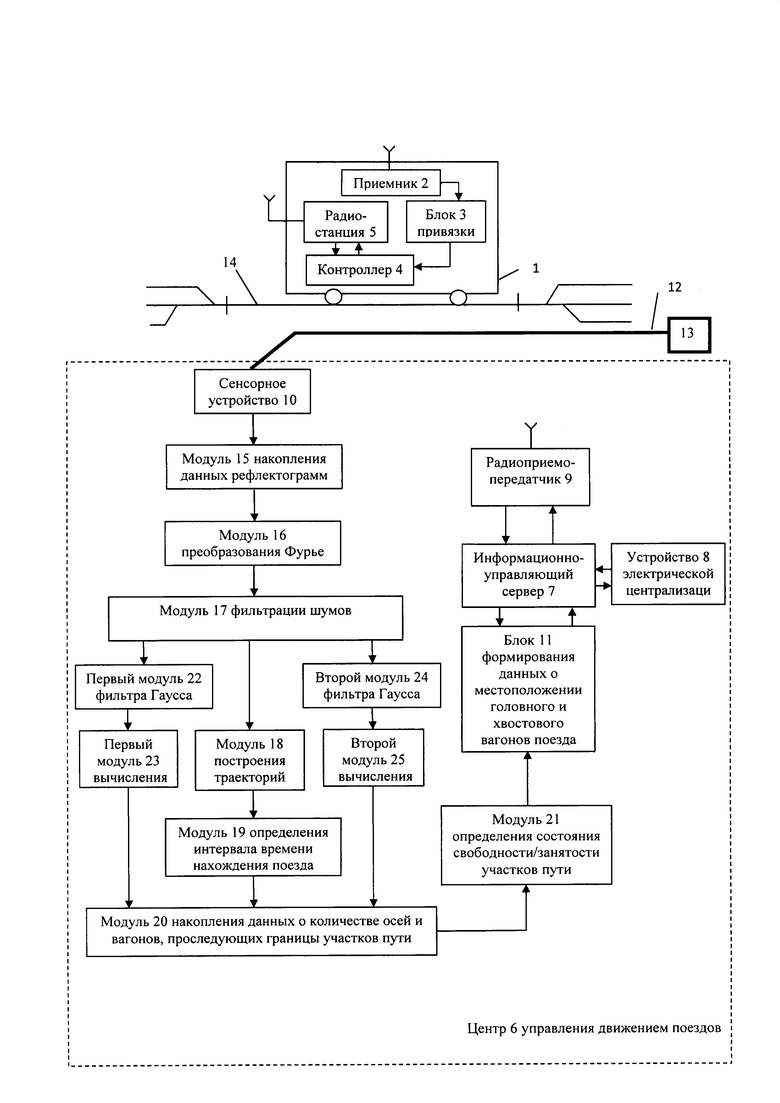
На чертеже приведена схема предлагаемой системы контроля местоположения поезда.
Система контроля местоположения поезда 1 содержит бортовой приемник 2 спутниковой навигационной системы, выход которого через блок 3 привязки географических координат к трассе железнодорожной линии соединен с бортовым контроллером 4, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции 5, центр 6 управления движением поездов, в котором установлены информационно-управляющий сервер 7, устройство 8 электрической централизации, стационарный радиоприемопередатчик 9, сенсорное устройство 10 слежения за движением поездов по перегону и блок 11 формирования данных о местоположении головного и хвостового вагонов поезда, при этом первый вход и первый выход информационно-управляющего сервера 7 соединены соответственно с выходом и входом устройства 8 электрической централизации, второй вход и второй выход информационно-управляющего сервера 7 соединены соответственно с выходом и входом стационарного радиоприемопередатчика 9, а третий вход и третий выход информационно-управляющего сервера 7 соединены соответственно с первым выходом и первым входом блока 11 формирования данных о местоположении головного и хвостового вагонов поезда, вход/выход сенсорного устройства 10 слежения за передвижением поезда по перегону подключен к волоконно-оптическому кабелю 12 с герметичной заглушкой 13, проложенному вдоль пути 14 на заданном расстоянии, в центре 6 управления движением поездов установлены последовательно соединенные модуль 15 накопления данных рефлектограмм, модуль 16 преобразования Фурье, модуль 17 фильтрации шумов, модуль 18 построения траекторий головы и хвоста поезда, модуль 19 определения интервала времени нахождения поезда в рассматриваемой координате пути, модуль 20 накопления данных о количестве осей и вагонов, преследующих границы участков пути, и модуль 21 определения состояния свободности/занятости участков пути, второй выход модуля 17 фильтрации шумов через первый модуль 22 фильтра Гаусса соединен с первым модулем 23 вычисления количества локальных максимумов, выход которого соединен со вторым входом модуля 20 накопления данных о количестве осей и вагонов, а третий выход модуля 17 фильтрации шумов через второй модуль 24 фильтра Гаусса соединен со вторым модулем 25 вычисления количества локальных максимумов, выход которого соединен с третьим входом модуля 20 накопления данных о количестве осей и вагонов, при этом вход модуля 15 накопления данных рефлектограмм подключен к дополнительному выходу сенсорного устройства 10 слежения за движением поездов по перегону, а выход модуля 21 определения состояния свободности/занятости участков пути соединен со вторым входом блока 11 формирования данных о местоположении головного и хвостового вагонов поезда.
Система контроля местоположения поезда работает следующим образом.
Местоположение поезда 1 на пути 14 перегона обнаруживается локационным методом, осуществляемым установленным в центре 6 управления сенсорным устройством 10 слежения за движением поезда по перегону (рефлектометром). Вход/выход сенсорного устройства 10 слежения за движением поезда по перегону подключен к волоконно-оптическому кабелю 12 (распределенному чувствительному элементу, который является стандартным телекоммуникационным одномодовым волокном) посредством оптического блока (на чертеже не показан), входящего в состав рефлектометра.
Когерентный источник излучения, входящий в состав сенсорного устройства 10 слежения за передвижением поезда, вводит в волоконно-оптический кабель 12 с герметичной заглушкой 13 периодически с заданной частотой короткие оптические импульсы (длина импульса зависит от длины кабеля). Отраженная световая волна, поступающая на вход сенсорного устройства 10 регистрируется фото детектором рефлектометра. Сигнал в виде рефлектограммы распределения акустического воздействия по всей длине волокна передается с выхода сенсорного устройства 10 в модуль 15 накопления данных рефлектограмм.
При акустической вибрации волоконно-оптического кабеля 12, вызываемой движением поездов, происходит изменение отражения сигнала. Блок 11 формирует данные о местоположении головного и хвостового вагонов в поезде после обработки рефлектограмм, данные о которых поступают в модуль 15 в режиме реального времени. Блок 11 выдает решение о занятости или свободности участков пути, ограниченных контрольными точками. Он определяет занятие участка пути, когда его внутренний пороговый элемент (на чертеже не показано) определяет наличие движущегося поезда на границе участка пути и определяет освобождение участка пути, накапливая данные о поездах, занимающих участки пути, и сравнивая с указанными данными параметры поездов покидающих участки пути.
Блок 11 по изменению координат контролирует направление движения поезда. Функционирование блока 11 по контролю передвижения поезда начинается с момента поступления на его первый вход сигнала старта с третьего выхода информационно-управляющего сервера 7. Сигнал старта формируется информационно-управляющим сервером 7 при открытии выходного светофора для выхода поезда на перегон.
Программным обеспечением информационно-управляющего сервера 7 информация о передвижении поезда привязывается к плану перегона для отображения на мониторе оператора центра 6 управления движением поезда по перегону. С использованием информации о местоположении поезда информационно-управляющий сервер 7 формирует сообщение о поездной ситуации на перегоне.
Информация от бортового приемника 2 спутниковой навигационной системы (GPS приемника) поступает через блок 3 привязки географических координат к трассе железнодорожной линии в бортовой контроллер 4 и затем через выход бортового контроллера 4 на вход локомотивной радиостанции 5. От локомотивной радиостанции 5 информация о местоположении поезда передается в стационарный радиоприемопередатчик 9. По интерфейсу RS-485 она поступает на второй вход информационно-управляющего сервера 7, где сопоставляется с аналогичной информацией от блока 11 формирования данных о местоположении головного и хвостового вагонов поезда для формирования точного местоположения поезда.
Для повышения точности определения блоком 11 данных о местоположении головного и хвостового вагонов поезда, в предлагаемом устройстве исходные сигналы с выхода сенсорного устройства 10 (рефлектограмма распределения акустического воздействия по всей длине волокна) подвергаются дополнительной обработке, после которой поступают в блок 11 формирования данных о местоположении головного и хвостового вагонов поезда для логической обработки вместе с информационными сигналами несущими дополнительную логическую и контрольную информацию.
По данным рефлектометра из устройства 10 определяются в определенных точках, являющихся границами участков пути, на линии количество осей и вагонов поездов, следующих по железнодорожной линии, вдоль которой уложен оптоволоконный кабель.
При обработке сигналов с выхода устройства 10 осуществляется отделение сигналов от виброакустических воздействий, связанных с движением поездов по линии, от прочих сигналов. Устанавливаются точки с высоким соотношением сигнал/шум и определяются точные моменты въезда и выезда каждого поезда в каждую из координат оптоволокна, принадлежащую окрестностям данных точек.
Для фильтрации посторонних шумов используется переход в спектральную область. Рефлектограмма представляется в виде числового массива соответствующего интенсивности обратно рассеянного излучения в кабеле.
Модуль 15 накопления данных рефлектограмм сохраняет информацию заданного числа фиксируемых подряд рефлектограмм, после чего модуль 16 по данным накопленного набора рефлектограмм выполняет преобразование Фурье и далее модуль 17 осуществляет фильтрации шумов, в результате которой формируется спектрограмма с уменьшенным уровнем посторонних шумов.
Отфильтрованный сигнал с выхода модуля 17 поступает в модуль 18, который определяет траектории головы и хвоста поезда в окрестности рассматриваемых координат пути путем определения первого и последнего превышения фиксированного порогового значения для каждой координаты оптоволокна в рассматриваемых окрестностях координат пути. После чего модуль 19 определяет интервал времени нахождения поезда в рассматриваемых координатах пути используя построенные модулем 18 траектории.
Первый модуль 22 фильтра Гаусса и второй модуль 24 фильтра Гаусса, подключенные соответственно ко второму и третьему выходам модуля 17 фильтрации шумов, выполняют фильтрацию с различными параметрами для снижения уровня шума, что позволяет в дальнейшем осуществлять подсчет числа осей и вагонов.
Для этого сигналы с выходов первого модуля 22 фильтра Гаусса и второго модуля 24 фильтра Гаусса поступают соответственно в модуль 23 и модуль 25, которые вычисляют количество локальных максимумов в сигналах с выходов этих фильтров Гаусса, превышающих фиксированные пороговые значения, по этим данным определяется количество осей и вагонов. Информация о подсчитанном количестве осей и вагонов поступает в модуль 20, в котором осуществляется накопления этих данных.
Модуль 21 определяет состояния участков пути, определяя освобождение участка пути в случае одинакового количества осей и вагонов, подсчитанных на въезде поезда на рассматриваемый участок пути и выезде поезда из него.
По информации о состоянии объектов на станции, включающей данные о номере маршрута, состоянии станционных рельсовых цепей, переданным от устройства 8 электрической централизации на вход информационно-управляющего сервера 7, информационно-управляющий сервер 7 формирует сообщение (управляющие команды по движению) о поездной ситуации на станции, которое поступает в стационарный радиоприемопередатчик 9 для его передачи по радиоканалу на локомотивную радиостанцию 5. С выхода локомотивной радиостанции 5 управляющие команды по движению поступают в бортовой контроллер 4, который обеспечивает отображение управляющих команд движения на информационном табло машиниста (на чертеже не показано), для принятия решений по управлению движением поезда.
Предлагаемая система контроля местоположения поезда повышает достоверность определения состояния участков пути и снижает влияние трассы укладки кабеля на конкретном перегоне на работу системы виброакустического мониторинга, а также обеспечивает работу данной системы для всех типов подвижного состава без ограничений на длину поезда.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
| Система контроля местоположения поезда на станции | 2020 |
|
RU2737811C1 |
| Система контроля местоположения поездов | 2019 |
|
RU2727438C1 |
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
| Система обмена данными локомотивных систем с диспетчерским центром контроля и управления | 2018 |
|
RU2678915C1 |
| Устройство для регулирования движения поездов | 2023 |
|
RU2806466C1 |
| Система интервального регулирования движения поездов | 2021 |
|
RU2761485C1 |
Изобретение относится к железнодорожной автоматике для контроля позиции поезда на пути. Система содержит центр управления движением поездов, волоконно-оптический кабель с герметичной заглушкой, проложенный вдоль пути, и бортовую часть, включающую бортовой приемник спутниковой навигационной системы, блок привязки географических координат к трассе железнодорожной линии, контроллер и локомотивную радиостанцию. Причем центр управления включает информационно-управляющий сервер, устройство электрической централизации, стационарный радиоприемопередатчик, сенсорное устройство слежения за движением поездов по перегону, блок данных о местоположении головного и хвостового вагонов поезда, последовательно соединенные модули накопления рефлектограмм, преобразования Фурье, фильтрации шумов, построения траекторий головы и хвоста поезда, определения интервала времени нахождения поезда в рассматриваемой координате пути, накопления данных о количестве осей и вагонов, преследующих границы участков пути, определения состояния свободности/занятости участков пути, а также два модуля фильтра Гаусса и два модуля вычисления количества локальных максимумов. Достигается повышение точности определения местоположения головного и хвостового вагонов поезда. 1 ил.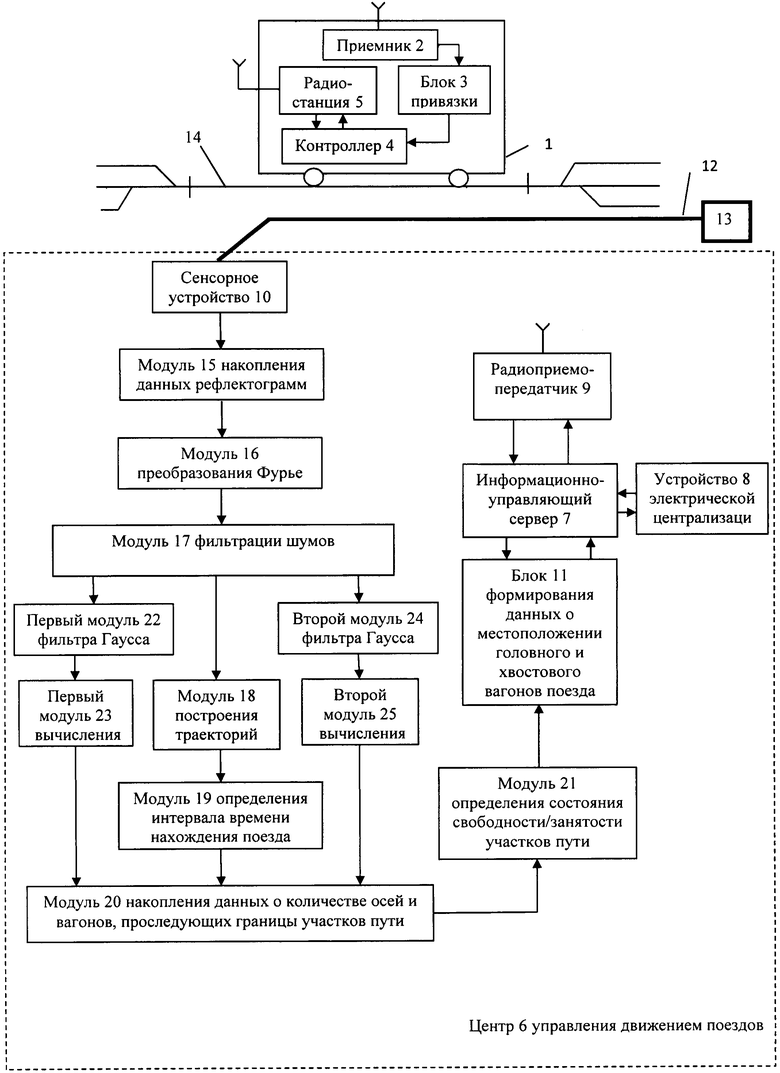
Система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии соединен с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, центр управления движением поездов, в котором установлены информационно-управляющий сервер, устройство электрической централизации, стационарный радиоприемопередатчик, сенсорное устройство слежения за движением поездов по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, при этом первый вход и первый выход информационно-управляющего сервера соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а третий вход и третий выход информационно-управляющего сервера соединены соответственно с первым выходом и первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, вход/выход сенсорного устройства слежения за передвижением поезда по перегону подключен к волоконно-оптическому кабелю с герметичной заглушкой, проложенному вдоль пути на заданном расстоянии, отличающаяся тем, что в центре управления движением поездов установлены последовательно соединенные модуль накопления данных рефлектограмм, модуль преобразования Фурье, модуль фильтрации шумов, модуль построения траекторий головы и хвоста поезда, модуль определения интервала времени нахождения поезда в рассматриваемой координате пути, модуль накопления данных о количестве осей и вагонов, преследующих границы участков пути, и модуль определения состояния свободности/занятости участков пути, второй выход модуля фильтрации шумов через первый модуль фильтра Гаусса соединен с первым модулем вычисления количества локальных максимумов, выход которого соединен со вторым входом модуля накопления данных о количестве осей и вагонов, а третий выход модуля фильтрации шумов через второй модуль фильтра Гаусса соединен со вторым модулем вычисления количества локальных максимумов, выход которого соединен с третьим входом модуля накопления данных о количестве осей и вагонов, при этом вход модуля накопления данных рефлектограмм подключен к дополнительному выходу сенсорного устройства слежения за движением поездов по перегону, а выход модуля определения состояния свободности/занятости участков пути соединен со вторым входом блока формирования данных о местоположении головного и хвостового вагонов поезда.
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| CN 103926588 A, 16.07.2014 | |||
| CN 102806932 B, 13.01.2016 | |||
| ОПРЕДЕЛЕНИЕ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2608783C2 |

