Изобретение относится к области железнодорожной автоматики и телемеханики и может быть использовано в системах управления движением поездов на станции без использования устройств СЦБ.
Известна система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии соединен с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, центр управления движением поездов, в котором установлены информационно-управляющий сервер, устройство электрической централизации, стационарный радиоприемопередатчик, сенсорное устройство слежения за движением поездов по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, при этом первый вход и первый выход информационно-управляющего сервера соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, а третий вход и третий выход информационно-управляющего сервера соединены соответственно с первым выходом и первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, вход/выход сенсорного устройства слежения за передвижением поезда по перегону подключен к волоконно-оптическому кабелю с герметичной заглушкой, проложенному вдоль пути на заданном расстоянии, блок интеллектуальной цифровой обработки рефлектограмм, вход которого подключен к дополнительному выходу сенсорного устройства слежения за движением поездов по перегону, а его выход соединен со вторым входом блока формирования данных о местоположении головного и хвостового вагонов поезда (RU2659913, B61L 25/02, 04.07.2018).
Недостатком известной системы является невозможность автоматического определения пути, на котором находится поезд, без использования устройств СЦБ и путевых датчиков из-за погрешности определения местоположения 10 метров.
В качестве прототипа выбрана система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, выход которого через блок привязки географических координат к трассе железнодорожной линии связан с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленный в центре управления информационно-управляющий сервер, первый вход и первый выход которого соединены соответственно с выходом и входом устройства электрической централизации, второй вход и второй выход информационно-управляющего сервера соединены соответственно с выходом и входом стационарного радиоприемопередатчика, в центре управления дополнительно установлены сенсорное устройство слежения за передвижением поезда по перегону и блок формирования данных о местоположении головного и хвостового вагонов поезда, вдоль железнодорожного пути на заданном расстоянии от него проложен волоконно-оптический кабель с герметичной заглушкой и соединен с входом/выходом сенсорного устройства слежения за передвижением поезда по перегону, дополнительный выход которого соединен с первым входом блока формирования данных о местоположении головного и хвостового вагонов поезда, выход и второй вход которого соединены соответственно с третьим входом и третьим выходом информационно-управляющего сервера (RU 2560227, B61L 25/02, 20.08.2015).
Недостатком известной системы является невозможность автоматического определения пути, на котором находится поезд, без использования устройств СЦБ и путевых датчиков из-за погрешности определения местоположения 10 метров.
Технический результат изобретения заключается в автоматическом определении пути следования поезда без использования устройств СЦБ и рельсовых цепей, а также путевых датчиков на железнодорожной станции.
Технический результат достигается тем, что в системе контроля местоположения поезда, содержащей бортовой приемник спутниковой навигационной системы, соединенный с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленные в центре управления информационно-управляющий сервер, стационарный радиоприемопередатчик, блок формирования данных о местоположении поезда, подключенный к сенсорному устройству слежения за передвижением поезда, с входом/выходом которого соединен волоконно-оптический кабель с герметичной заглушкой, согласно изобретению в центре управления установлены навигационный приёмник, устройство вычисления относительных поправок координат, устройство обработки данных и вычислитель местоположения поезда относительно пути следования, в энергонезависимой памяти которого предварительно записана электронная карта плана станции, при этом волоконно-оптический кабель с герметичной заглушкой проложен последовательно вдоль железнодорожных путей станции от одной ее границы до другой, выход блока формирования данных о местоположении поезда соединен с информационно-управляющим сервером через вычислитель местоположения поезда относительно пути следования, второй вход которого соединен с выходом устройства вычисления относительных поправок координат, ко входам которого подключены выходы соответственно навигационного приёмника и устройства обработки данных, вход/выход которого соединен с выходом/входом стационарного радиоприемопередатчика.
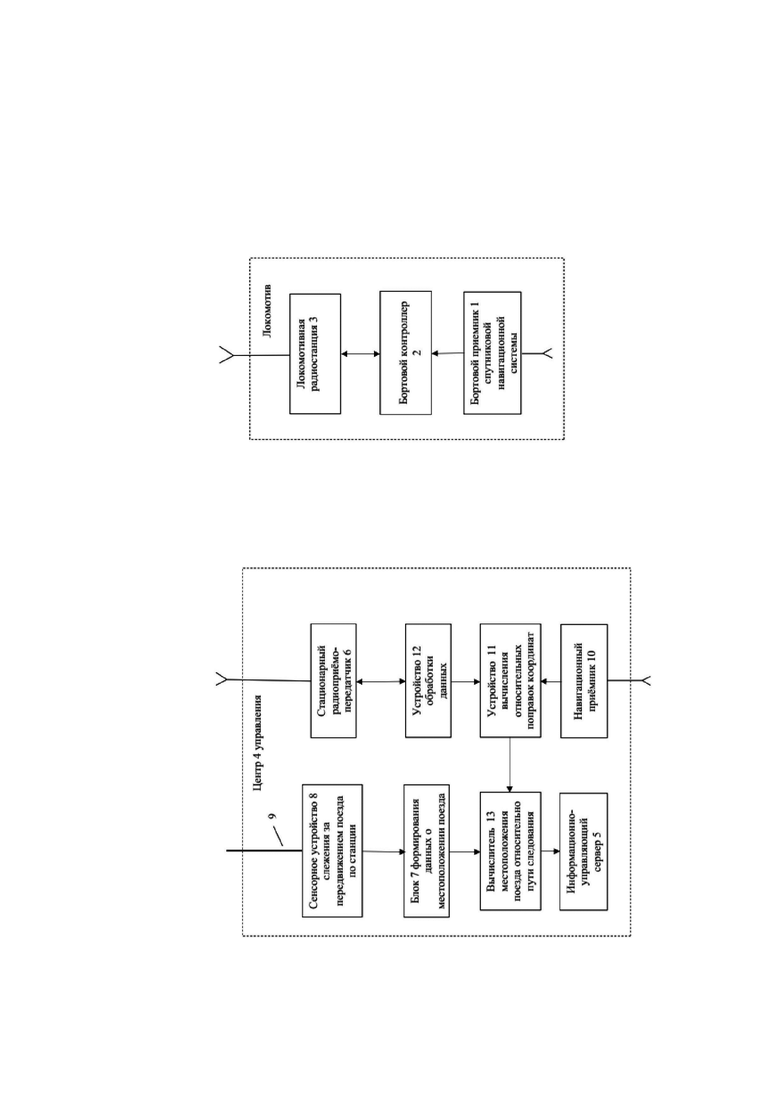
На чертеже приведена функциональная схема системы контроля местоположения поезда.
Система контроля местоположения поезда содержит бортовой приемник 1 спутниковой навигационной системы, соединенный с бортовым контроллером 2, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции 3, установленные в центре 4 управления информационно-управляющий сервер 5, стационарный радиоприемопередатчик 6, блок 7 формирования данных о местоположении поезда, подключенный к сенсорному устройству 8 слежения за передвижением поезда, с входом/выходом которого соединен волоконно-оптический кабель 9 с герметичной заглушкой, навигационный приёмник 10, устройство 11 вычисления относительных поправок координат, устройство 12 обработки данных и вычислитель 13 местоположения поезда относительно пути следования, в энергонезависимой памяти которого предварительно записана электронная карта плана станции, при этом волоконно-оптический кабель с герметичной заглушкой проложен последовательно вдоль железнодорожных путей станции от одной ее границы до другой, выход блока 7 формирования данных о местоположении поезда соединен с информационно-управляющим сервером 5 через вычислитель 13 местоположения поезда относительно пути следования, второй вход которого соединен с выходом устройства 11 вычисления относительных поправок координат, ко входам которого подключены выходы соответственно навигационного приёмника 10 и устройства 12 обработки данных, вход/выход которого соединен с выходом/входом стационарного радиоприемопередатчика 6.
Система контроля местоположения поезда работает следующим образом.
На станции прокладывается под землёй вдоль железнодорожных путей на заданном расстоянии оптоволоконный кабель (одномодовое оптическое волокно), реагирующий на вибрацию при перемещении вдоль него поезда. Один конец оптоволоконного кабеля на границе станции заканчивается герметичной заглушкой, а другой соединён с сенсорным устройством 8 слежения за движением поездов на станции (когерентный рефлектометр).
Кабель прокладывается между путями, начиная от самых дальних путей от одной границы станции к другой, на противоположной границе кабель прокладывают в обратном направлении, не допуская резкого изгиба и повреждения кабеля в местах изменения направления, до первой границы, таким образом, охватывая все пути станции. Минимальное расстояние между путями составляет 4100 мм, ширина полосы чувствительности оптоволоконного кабеля, являющегося распределённым датчиком вибро-акустического воздействия, равна ±10000 мм, поэтому между соседними звеньями кабеля расстояние должно составлять 20000 мм, т.е. одно звено кабеля для каждых четырёх путей.
На станции, в центре 4 управления движением поездов, с помощью высокоточных геодезических приборов измеряются географические координаты реперной точки места расположения навигационной антенны. Значение координат записывают в энергонезависимую память устройства 11 вычисления относительных поправок координат.
Сенсорное устройство 8 слежения формирует оптические сканирующие импульсы и передаёт их в оптоволоконный кабель непрерывно с заданной частотой (частота зависит от длины кабеля) и принимает отражённый рассеянный сигнал, на основе которого строится рефлектограмма. В режиме реального времени эталонная рефлектограмма, полученная во время, когда ни один поезд не движется по станции, сравнивается с полученными.
Рефлектограмма, полученная в условиях движущегося по пути поезда, отличается от рефлектограммы при условии свободного пути наличием серии импульсов в местах вибрации. В блоке 7 формирования данных о местоположении поезда по разности рефлектограмм определяется место воздействия на оптоволоконный кабель, что соответствует местоположению на плане станции, радиусом 10 метров. Все пути на плане станции разбиты на условные виртуальные участки протяжённостью 100 метров, которые включают в себя от одного до четырех путей (в зависимости от расположения путей относительно друг друга), входящих в зону полосы чувствительности одного сегмента оптоволоконного кабеля. Каждому участку присвоен уникальный номер, и ему соответствует известное значение длины оптоволоконного кабеля от начала кабеля до текущего виртуального участка. Рефлектограмма распределения акустического воздействия по всей длине оптоволоконного кабеля поступает в блок 7 формирования данных о местоположении поезда, в местах изменения отражённого сигнала определяется наличие движущихся поездов. Расстояние до места виброакустического воздействия на рефлектограмме пропорционально длине оптоволоконного кабеля от одного конца, находящего в центре 4 управления, до места обнаружения поезда. По полученным данным определяется номер виртуального участка на плане станции, который передаётся в вычислитель 13 местоположения поезда относительно пути следования.
На станции в центре 4 управления движением поездов установлен навигационный приёмник 10, с точностью определения местоположения до 7 метров, соединённый с навигационной антенной. Предварительно с высокой точностью, в пределах сантиметра, вычисляется реперная точка нахождения навигационной антенны.
В устройстве 11 вычисления относительных поправок координат, по мере поступления данных от станционного навигационного приёмника 10 производится сравнение географических координат реперной точки, и текущего значения навигационных данных. Вычисляется разница значений вычисленной точки по широте и долготе с учётом знака, то есть определяется относительная поправка, и сохраняется значение относительной поправки вместе с временем получения навигационных данных приёмника.
При подъезде к станции, на борт локомотива поступают команды управления режимом обмена данными со станцией. В соответствии с установленным режимом, с заданной периодичностью, в центр 4 управления движением поездов передаются данные, содержащие номер поезда, время передачи и текущие географические координаты с признаком достоверности данных. Бортовой приемник 1 спутниковой навигационной системы имеет точность определения местоположения 7 метров.
В устройстве 12 обработки данных по информации из бортового контроллера 2 каждого поезда, передаваемой по радиоканалу с локомотивной радиостанции 3 на стационарный радиоприемопередатчик 6, создаётся серия точек, каждая из которых корректируется относительной поправкой в соответствии с временем получения данных.
В энергонезависимой памяти вычислителя 13 местоположения поезда относительно пути следования хранится предварительно созданная электронная карта плана станции, содержащая все виртуальные участки. Для каждого виртуального участка в электронной карте отведено место для уникального номера, сведений о количестве путей на виртуальном участке и для каждого входящего в него пути массив данных, содержащий географические координаты точек, принадлежащих этому пути с шагом не более метра друг от друга, а также номер этого пути. Географические координаты точек путей должны быть вычислены с точностью выше 1 метра. Для этого также может быть использован метод относительного позиционирования. По вычисленному номеру виртуального участка из электронной карты выбираются массивы координат путей и сравниваются с массивом скорректированных координат, полученных от поезда, в результате определяется путь, на котором находится в настоящее время поезд.
Таким образом, железнодорожная координата поезда и его путь следования определяются без использования устройств СЦБ, путевых датчиков и рельсовых цепей, эти данные в режиме реального времени поступают на вход информационно-управляющего сервера 5 и могут использоваться для управления движением поездов.
Попавший в зону действия радиосвязи поезд сопровождается системой, пока не выедет за пределы станции. Во время стоянки поезда его местоположение контролируется по географическим координатам, полученным по каналу радиосвязи.
Предлагаемая система обеспечивает повышение безопасности движения поездов и повышает эффективность управления движением на станции.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| Система контроля местоположения поезда | 2018 |
|
RU2675041C1 |
| Система контроля местоположения поездов | 2019 |
|
RU2727438C1 |
| Система для управления движением поездов | 2021 |
|
RU2766016C1 |
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| Система виброакустических измерений и система контроля местоположения поезда | 2023 |
|
RU2814181C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИСТЕМОЙ АВТОМАТИЧЕСКОЙ ПЕРЕЕЗДНОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2732685C1 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| СИСТЕМА ИНТЕРВАЛЬНОГО РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ПОЕЗДОВ НА БАЗЕ РАДИОКАНАЛА | 2014 |
|
RU2556133C1 |
| Система интервального регулирования движения поездов | 2020 |
|
RU2746629C1 |
Изобретение относится к средствам контроля местоположения поезда на станции. Система содержит бортовой приемник (1) спутниковой навигационной системы, бортовой контроллер (2), локомотивную радиостанцию (3), установленные в центре (4) управления информационно-управляющий сервер (5), стационарный радиоприемопередатчик (6), блок (7) формирования данных о местоположении поезда, подключенный к сенсорному устройству (8) слежения за передвижением поезда, с входом/выходом которого соединен волоконно-оптический кабель (9) с герметичной заглушкой, навигационный приёмник (10), устройство (11) вычисления относительных поправок координат, устройство (12) обработки данных и вычислитель (13) местоположения поезда относительно пути следования, в энергонезависимой памяти которого предварительно записана электронная карта плана станции. Причем кабель (9) проложен вдоль железнодорожных путей станции от одной ее границы до другой, выход блока (7) формирования данных о местоположении поезда соединен с информационно-управляющим сервером (5) через вычислитель (13) местоположения поезда относительно пути следования, второй вход которого соединен с выходом устройства (11) вычисления относительных поправок координат, ко входам которого подключены выходы соответственно навигационного приёмника (10) и устройства (12) обработки данных, вход/выход которого соединен с выходом/входом стационарного радиоприемопередатчика (6). Достигается возможность автоматического определения пути следования поезда без использования устройств СЦБ и рельсовых цепей. 1 ил.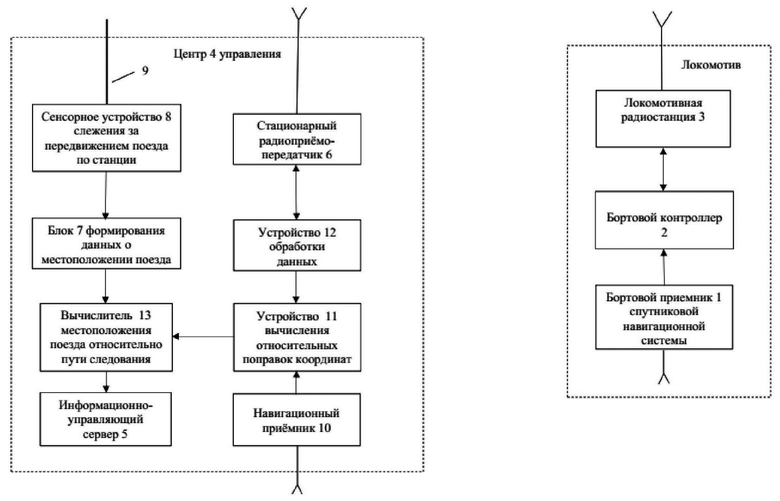
Система контроля местоположения поезда, содержащая бортовой приемник спутниковой навигационной системы, соединенный с бортовым контроллером, вход и выход которого соединены соответственно с выходом и входом локомотивной радиостанции, и установленные в центре управления информационно-управляющий сервер, стационарный радиоприемопередатчик, блок формирования данных о местоположении поезда, подключенный к сенсорному устройству слежения за передвижением поезда, с входом/выходом которого соединен волоконно-оптический кабель с герметичной заглушкой, отличающаяся тем, что в центре управления установлены навигационный приёмник, устройство вычисления относительных поправок координат, устройство обработки данных и вычислитель местоположения поезда относительно пути следования, в энергонезависимой памяти которого предварительно записана электронная карта плана станции, при этом волоконно-оптический кабель с герметичной заглушкой проложен последовательно вдоль железнодорожных путей станции от одной ее границы до другой, выход блока формирования данных о местоположении поезда соединен с информационно-управляющим сервером через вычислитель местоположения поезда относительно пути следования, второй вход которого соединен с выходом устройства вычисления относительных поправок координат, ко входам которого подключены выходы соответственно навигационного приёмника и устройства обработки данных, вход/выход которого соединен с выходом/входом стационарного радиоприемопередатчика.
| СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ПОЕЗДА | 2014 |
|
RU2560227C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РЕСУРСОВ В ПРЕДЕЛАХ ЖЕЛЕЗНОДОРОЖНОЙ СТАНЦИИ | 2006 |
|
RU2473443C2 |
| Система интервального регулирования движения поездов на базе радиоканала | 2016 |
|
RU2618660C1 |
| Система контроля местоположения поезда | 2017 |
|
RU2659913C1 |
| Система контроля местоположения поезда | 2018 |
|
RU2675041C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ НА ЦИФРОВОЙ МОДЕЛИ ПУТЕВОГО РАЗВИТИЯ СТАНЦИИ | 2012 |
|
RU2503567C1 |

