Заявляемая система относится к резервным системам измерения и индикации, обеспечивающим пилотирование самолетов и вертолетов (в дальнейшем - ЛА) в случае отказа основных пилотажно-навигационных систем.
Изобретение касается резервных средств измерения и индикации параметров полета ЛА, а именно приборов, расположенных на приборной доске кабины пилота, обеспечивающих измерение и индикацию основных пилотажно-навигационных данных для пилотирования в случаях выхода из строя основных пилотажно-навигационных систем.
Обычно на приборной панели современного ЛА расположены: пилотажные индикаторы, отображающие по данным от основных бортовых систем пространственное положение ЛА, данные по высоте и скорости. На панели также расположены резервный авиагоризонт, резервный высотомер, резервный указатель скорости и резервный вариометр, не входящие в состав основной системы индикации, которые необходимы для отображения данных о пространственном положении, высоте, приборной скорости и вертикальной скорости. Эти приборы работают автономно без взаимодействия с другими системами и датчиками. В случае отказа основной системы измерения и индикации пилот может использовать необходимую для пилотирования информацию от этих резервных приборов и продолжить полет до ближайшего пункта посадки.
Известен также патент «Комбинированные резервные приборы для самолета» [1]. Данное изобретение относится к резервным приборам, которые выдают информацию о трех основных параметрах для пилота самолета в случае отказа основных приборов, а именно: информацию о приборной скорости, которая вычисляется на основе измерения динамического давления, о барометрической высоте самолета, вычисляемой на основе измерения статического давления, и о пространственном положении самолета, вычисляемом на основе данных от автономных инерциальных датчиков, размещенных в модуле пространственной ориентации. Конструктивно «Комбинированные резервные приборы для самолета» выполнены в виде отдельного блока. В частности, в нем предусматривается замена трех механических резервных указателей электронными комбинированными устройствами, дисплей которых изготовлен на ЖК-кристаллах, на экране которого отображаются три основные параметра, соответствующие режиму полета, а именно: высота, приборная скорость и пространственное положение самолета. Для обеспечения высокого уровня безопасности резервные устройства и система основного индицирующего оборудования первого и второго пилотов полностью независимы друг от друга. Система резервных устройств имеет свои собственные инерциальные средства определения пространственного положения самолета относительно вертикали и свои собственные измерительные средства для измерения статического и динамического давлений, соединенные с бортовыми пневматическими измерительными зондами и вычисления высотно-скоростных параметров полета ЛА.
Приборная скорость измеряется обычным способом путем вычисления из динамического давления, которое является разностью между полным давлением и статическим давлением.
Барометрическая высота, измеряемая системой резервных устройств, вычисляется также общепринятым методом на основе статического давления, с использованием уравнения Лапласа для стандартной атмосферы.
Объектом изобретения являются комбинированные резервные приборы для самолета, измеряющие и индицирующие приборную скорость, барометрическую высоту самолета и пространственное положение самолета и соответственно содержащие:
- два пневматических входа для измерения давления: один для полного давления, соединенный с зондом полного давления, который расположен на борту самолета, а другой - для статического давления, соединенный с зондом статического давления;
- электронную часть для измерения полного давления, содержащую электронный датчик давления, подсоединенный к пневматическому входу полного давления;
- электронную часть для измерения статического давления, содержащую электронный датчик, подсоединенный к пневматическому входу статического давления;
- электронную часть для проведения инерциальных измерений, содержащую гироскопические, акселерометрические или инклинометрические инерциальные датчики;
- электронное вычислительное устройство, вычисляющее приборную скорость на основе полного и статического давлений, барометрическую высоту на основе измеренного статического давления, пространственное положение самолета (углы тангажа, крена) на основе информации от инерциальных датчиков;
- электронные устройства для обеспечения индикации приборной скорости, барометрической высоты и пространственного положения самолета.
Кроме того, комбинированные резервные приборы также содержат электронное устройство вычисления числа М.
Комбинированные резервные приборы [1] представляют собой удлиненное одноблочное шасси, на котором размещены измерительные датчики давлений, модуль инерциальных датчиков, вычислительные средства и жидкокристаллический дисплей, занимающий переднюю часть панели.
К недостаткам данных резервных приборов следует отнести ограниченность выводимой на индикатор информации, необходимой для обеспечения безопасности полета в случае выхода из строя основных пилотажно-навигационных систем, например, отсутствие информации о курсе, а также недостаточная точность измерения параметров пространственной ориентации из-за недостаточной точности встроенных в прибор гироскопических датчиков и датчиков линейных ускорений.
Задачей, на решение которой направлено заявляемое техническое решение, является устранение указанных недостатков. Технический результат выражается в повышении точности вычисляемых пилотажно-навигационных параметров, а также увеличении объема информации, выводимой на экран индикатора.
Решение поставленной задачи осуществляется тем, что заявляемая измерительная система резервных приборов для самолетов и вертолетов выполнена так же, как и аналог, в виде отдельного блока. Система содержит ЖК-индикатор, датчики полного и статического давлений, соединенные трубопроводами соответственно с бортовыми зондами полного и статического давлений, электронные средства для вычисления полного и статического давлений, электронное устройство инерциальных измерений (модуль пространственной ориентации) с гирометрическими и акселерометрическими инерциальными датчиками, осуществляющее вычисление пространственного положения летательного аппарата (угол тангажа, угол крена). Система резервных приборов также содержит электронные средства для вычисления и отображения на индикаторе данных о скорости, барометрической высоте, вертикальной скорости и числе М. Система дополнительно содержит средства для приема информации от спутниковой навигационной системы, БИНС, информации от бортового магнитного зонда, радиосредств и приемника температуры торможения, а также средства для приема данных от системы управления двигателем. Система может содержать также встроенный магнитный зонд, информация с которого используется для вычисления магнитного курса. Система содержит также средства для вычисления пространственного положения и курса с учетом коррекции по данным спутниковой навигационной системы и от БИНС, средства для вычисления курса с коррекцией по информации магнитного зонда и по данным от радиосредств, электронные средства для индикации вычисленных аэрометрических параметров (скорость, высота, вертикальная скорость, числа М), параметров пространственного положения (углы крена и углы тангажа), а также электронные средства для вывода в бортовые системы всех скорректированных индицируемых параметров. На лицевой панели прибора размещены жидкокристаллический экран и устройства управления, содержащие две многофункциональные кремальеры, органы управления: регулировка яркости ЖК экрана, датчик внешней освещенности экрана. Многофункциональные кремальеры обеспечивают ввод барокоррекции, заданной высоты, заданного курса, заданной скорости, программирование маршрута полета.
Отличительной особенностью заявляемой системы является то, что система резервных приборов содержит электронные средства для вычисления скорректированных воздушных параметров ЛА путем комплексирования информации воздушных параметров, вычисленных по данным от встроенных в резервную систему датчиков статического и полного давлений, с информацией от основной системы воздушных сигналов (высота, скорость, число М, вертикальная скорость) и выдачу скорректированных данных на ЖК-индикатор и в бортовые системы.
Другой отличительной особенностью заявляемой резервной системы является также то, что она содержит средства для вычисления скорректированных параметров пространственного положения ЛА путем комплексирования информации о пространственном положении ЛА от встроенного в резервную систему модуля пространственной ориентации, содержащего инерциальные датчики, с информацией от основной навигационной системы и от спутниковой навигационной системы, данных с магнитного зонда и выдачу скорректированных данных в вычислитель, который преобразует полученную информацию в нужную форму и передает ее на ЖК-индикатор и в бортовые системы.
Следующей отличительной особенностью системы является также то, что система может содержать встроенный в нее магнитный зонд, информация с которого также может использоваться в модуле пространственной ориентации для корректировки курса (при неиспользовании информации от бортового магнитного зонда). Следующей отличительной особенностью системы является также то, что система содержит на лицевой панели жидкокристаллический экран, на обрамлении которого размещены органы управления, содержащие две многофункциональные кремальеры, орган управления регулировкой яркости ЖК-экрана, датчик внешней освещенности экрана. Многофункциональные кремальеры обеспечивают ввод барокоррекции, заданной высоты, заданного курса, заданной скорости и программирование плана полета.
Особенностью заявляемой резервной системы является то, что в системе предусмотрено вычисление и индикация истинного курса полета с использованием данных со спутниковой навигационной системы, вывод на экран индикатора заданного курса и индикацию величины отклонения от заданного курса. В системе также предусмотрены вычисление гиромагнитного курса и его индикация в случае необходимости (при пропадании сигнала со спутниковой системы), а также взаимодействие с системой посадки и радиомаяками.
Отличительной особенностью системы является и то, что она содержит средства приема данных от системы управления двигателем, а также средства преобразования полученных сигналов в нужную форму и выдачу информации о состоянии двигателя на ЖК-индикатор.
Сущность заявляемого технического решения поясняется чертежом, на котором обозначено:
1 - датчик полного давления ДД рп;
2 - датчик статического давления ДД рст.;
3 - устройство обработки и преобразования сигналов УОПС;
4 - первая кодовая линия связи КЛС;
5 - вычислитель В;
6 - модуль пространственной ориентации МПО;
7 - вторая кодовая линия связи КЛС;
8 - устройство ввода-вывода УВВ;
9 - магистраль информационного обмена МИО;
10 - жидкокристаллический индикатор ЖКИ;
11 - магнитный зонд МЗ;
12 - устройство управления яркостью УУЯ;
13 - устройство управления режимами работы УУР.
Заявляемая резервная система работает следующим образом. В процессе полета сигналы от встроенных в систему датчиков полного и статического давлений 1 и 2 и сигнала от бортового датчика температуры торможения потока (не входит в состав системы) поступают в устройство обработки и преобразования сигналов УОПС 3. Устройство УОПС обрабатывает эти сигналы, вычисляет полное Рп и статическое Рст давления и температуру торможения потока (Тп), а также корректирует сигналы с датчиков давлений в зависимости от температуры окружающей среды. Скорректированные сигналы давлений (Рст, Рп) и сигнал Тп из УОПС по первой кодовой линии связи 4 (канал RS-232) поступают в вычислитель 5. С помощью гироскопических датчиков, датчиков линейных ускорений и электронных вычислительных средств, размещенных в модуле пространственной ориентации МПО 6, вычисляются основные параметры положения летательного аппарата по осям X, Y, Z - угол крена, угол тангажа, гироскопический курс. Данные о пространственном положении ЛА с МПО по второй кодовой линии связи 7 (канал RS-232) передаются в вычислитель5. Вычислитель 5 на основе полученных сигналов с блока УОПС 3 вычисляет по известным зависимостям основные пилотажные параметры: приборную скорость Vпр, истинную скорость Vист, абсолютную высоту Набс, относительную высоту Нотн, вертикальную скорость Vв, температуру наружного воздуха Тст, число М.
Данные от спутниковой навигационной системы СНС, бортовой навигационной системы БИНС, бортового магнитного зонда, радиосредств принимаются устройством ввода-вывода УВВ 8 и по командам контроллера вычислителя 5 по магистрали информационного обмена 9 поступают в вычислитель, который преобразует полученные сигналы в нужную форму и передает их в модуль МПО 6. МПО содержит вычислительные средства, с помощью которых, в зависимости от приоритета, осуществляется корректировка пространственного положения ЛА с учетом полученных данных от СНС и бортовых систем. Сигналы скорректированных параметров пространственного положения из МПО 6 поступают в вычислитель 5, который преобразовывает полученные сигналы и сигналы вычисленных пилотажных параметров (Vпр, Vист, Набс, Нотн, Vв, Тст, число М) в форму, удобную для индикации, и выдает их на ЖКИ 10.
При исполнении системы со встроенным в нее магнитным зондом работа системы в части коррекции курса осуществляется по информации со встроенного магнитного зонда 11, данные с которого поступают в вычислитель и далее в модуль МПО 6, где осуществляется процесс коррекции курса (гиромагнитный курс). Сигналы скорректированного гиромагнитного курса по магнитным данным со встроенного в систему магнитного зонда (также как и при коррекции курса от бортового магнитного зонда) поступают в вычислитель 5, который преобразует скорректированные сигналы в нужную форму и передает их на ЖКИ. Сигналы СНС и БИНС используются в резервной системе для коррекции основных инерциальных параметров ЛА, вычисленных автономными гироскопическими датчиками и датчиками линейных ускорений, размещенными в модуле МПО 6. При этом преимущество в первую очередь отдается сигналам от работающей спутниковой навигационной системы СНС. При пропадании сигнала от СНС корректировка пилотажно-навигационных параметров резервной системы осуществляется по данным от БИНС. При выходе из строя обеих систем резервная система корректирует вычисленные пилотажно-навигационные параметры с использованием информации от магнитного зонда, причем магнитный зонд может быть как внешним по отношению к системе (бортовой магнитный зонд), так и встроенным в систему.
Резервная система работает в трех режимах:
- автономный режим,
- режим с коррекцией от СНС,
- режим с коррекцией от БИНС.
В автономном режиме система за счет внутренних средств осуществляет измерение, вычисление и индикацию приборной скорости, истинной скорости, барометрической высоты, вертикальной скорости, числа М, углы крена, тангажа, магнитного курса.
В режиме с коррекцией от СНС система также осуществляет измерение, вычисление приборной скорости, истинной скорости, барометрической высоты, вертикальной скорости, число М, углов крена, тангажа, истинного курса и проводит коррекцию инерциальных параметров с использованием данных от системы СНС, преобразовывает вычисленные и скорректированные параметры в нужную форму и индицирует их на экране ЖКИ. Индицируемые скорректированные навигационные параметры имеют более высокую точность по сравнению с параметрами, вычисленными автономными датчиками. С использованием данных от СНС система дополнительно индицирует путевой угол, путевую скорость.
В режиме с коррекцией от БИНС система также осуществляет измерение, вычисление приборной скорости, истинной скорости, барометрической высоты, вертикальной скорости, числа М, углов крена, тангажа и проводит коррекцию инерциальных параметров с использованием данных от системы БИНС, преобразовывает вычисленные и скорректированные параметры в нужную форму и индицирует их на экране ЖКИ. В этом режиме система вместо магнитного курса индицирует гиромагнитный курс.
Система имеет возможность взаимодействия с радиосистемой ближней и дальней навигации и осуществлять радионавигацию, при этом на экране ЖК-индикатора индицируется:
- направление на маяки,
- дальность до маяков.
Система также имеет возможность взаимодействовать с приводными радиомаяками и осуществлять заход на посадку по глиссаде. Кроме того, система позволяет осуществлять пилотирование ЛА по заданному маршруту с использованием планируемых промежуточных пунктов маршрута ППМ.
Система имеет также возможность с помощью вычислителя осуществлять вычисление скорректированного пространственного положения и скорректированного гиромагнитного курса с использованием данных с модуля пространственной ориентации, данных от бортовой навигационной системы и магнитного зонда, а также вычислять скорректированные аэрометрические данные (высота, скорость, вертикальная скорость, число М) по данным от датчиков полного и статического давлений и данным от инерциальных датчиков модуля пространственной ориентации, преобразование скорректированных аэрометрических данных и данных скорректированного пространственного положения и курса в нужную форму и передачу их по магистрали информационного обмена на ЖК-индикатор и через устройства ввода-вывода в бортовые системы.
Система содержит встроенное программное обеспечение.
Резервная система выполнена в виде отдельного блока. На передней панели размещен ЖК-индикатор, на задней панели размещены датчики полного и статического давлений. В средней части размещены модуль пространственной ориентации, источник электропитания и вычислитель.
Датчики давлений, датчики измерения инерциальных параметров выполнены в микроминиатюрном исполнении, что позволяет резко снизить габариты системы.
Электронные средства системы выполнены на основе современных элементов. Так, вычислитель построен на основе процессора типа SMP5PC-266 ф.Digital Logic; устройство обработки и преобразования сигналов - на основе микроконтроллера ATmega 128-16 AI ф.Atmel; устройство ввода-вывода - на основе ПЛИС АСЕЕХ EP1K100Q1208-2 и ОЗУ (NVRAM) ф.Aitera; кремальеры - на базе оптических кремальер 62S11-Н9-Р ф.Grayhill.
Источники информации
1. Патент США №6564628, МПК G01C 21/00, публ. 20.05.2003 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2009 |
|
RU2386927C1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА РЕЗЕРВНЫХ ПРИБОРОВ | 2015 |
|
RU2606712C2 |
| Интегрированная система резервных приборов | 2018 |
|
RU2734278C2 |
| ИНТЕГРИРОВАННЫЙ АВИАЦИОННЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ИНДИКАТОР | 2010 |
|
RU2441813C2 |
| Способ установки на приборную панель летательного аппарата резервного блока ориентации пилотажно-навигационного комплекса | 2023 |
|
RU2822083C1 |
| Интегрированная система резервных приборов | 2016 |
|
RU2656954C1 |
| Интегрированная система резервных приборов | 2023 |
|
RU2831723C1 |
| Интегрированная система резервных приборов | 2017 |
|
RU2690029C1 |
| Интегрированная система резервных приборов | 2020 |
|
RU2780634C2 |
| Резервная система ориентации | 2023 |
|
RU2826174C1 |
Изобретение относится к резервным системам измерения и индикации, обеспечивающим пилотирование в случае отказа основных пилотажно-навигационных систем. Интегрированная система резервных приборов для самолетов и вертолетов (в дальнейшем - ЛА), выполненная в виде отдельного блока, содержит ЖК-индикатор, датчики полного и статического давлений, соединенные трубопроводами с бортовыми зондами полного и статического давлений, электронные средства для вычисления полного и статического давлений, модуль пространственной ориентации с автономными датчиками инерциальных измерений, осуществляющими вычисление пространственного положения ЛА (угол тангажа, угол крена), электронные средства для вычисления данных о приборной скорости, барометрической высоты, вертикальной скорости и числа М, средства для приема информации от спутниковой навигационной системы, бортовой навигационной системы БИНС, информации от бортового магнитного зонда, радиосредств и приемника температуры торможения, средства для приема данных от системы управления двигателем, средства для вычисления пространственного положения и курса с учетом коррекции по данным спутниковой навигационной системы и БИНС, средства для вычисления курса с коррекцией по информации магнитного зонда и данных от радиосредств, а также электронные средства преобразования скорректированных сигналов в нужную форму и вывода их на экран индикатора и в бортовые системы. Технический результат выражается в повышении точности вычисляемых пилотажно-навигационных параметров, а также увеличении объема информации, выводимой на экран индикатора. 5 з.п. ф-лы, 1 ил.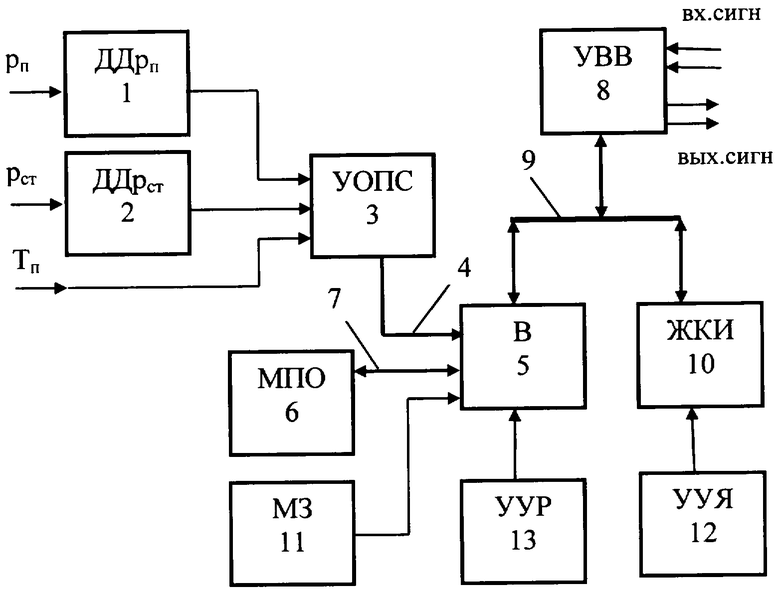
| УНИВЕРСАЛЬНЫЙ НАВИГАЦИОННЫЙ ПРИБОР УПРАВЛЕНИЯ ДВИЖЕНИЕМ НА ОСНОВЕ МИКРОМЕХАНИЧЕСКИХ ЧУВСТВИТЕЛЬНЫХ ЭЛЕМЕНТОВ И УНИФИЦИРОВАННАЯ ИНТЕГРИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЭТОГО ПРИБОРА | 2004 |
|
RU2263282C1 |
| БЕСПЛАТФОРМЕННЫЙ ИНЕРЦИАЛЬНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 2000 |
|
RU2162203C1 |
| RU 2058534 С1, 20.04.1996 | |||
| WO 03069279, 21.08.2003. | |||

