Область техники, к которой относится изобретение
Настоящее изобретение, в общем, относится к железнодорожным составам с распределенной энергией, содержащим ведущий локомотив и один или более отдаленных локомотивов, а в частности, к способу и устройству для обмена местами ведущего и отдаленного локомотивов железнодорожного состава с распределенной энергией.
Уровень техники
При работе железнодорожного состава с распределенной энергией движущая сила и тормозное действие передается от ведущего локомотива (или ведущей единицы) и одного или более отдаленных локомотивов (или отдаленных единиц), расположенных по отдельности от ведущей единицы в железнодорожном составе. В одной конфигурации железнодорожный состав с распределенной энергией содержит ведущий локомотив в головной части железнодорожного состава, отдаленный локомотив в конце железнодорожного состава (EOT) и один или более локомотивов в середине железнодорожного состава, расположенных между головой и концом железнодорожного состава. Работа распределенного железнодорожного состава может быть предпочтительной для длинного железнодорожного состава, чтобы улучшить управление и рабочие характеристики железнодорожного состава.
В железнодорожном составе с распределенной энергией каждый ведущий и отдаленный локомотив подает движущую силу и тормозное действие для железнодорожного состава. Сообщения команд движения и торможения выдаются машинистом в ведущем локомотиве и подаются отдаленным локомотивам по радиочастотной системе связи (такой как система связи с распределенной энергией из уровня техники LOCOTROL®, доступная от компании General Electric из Скенектади, Нью-Йорк), содержащей радиочастотную линию связи и принимающее и передающее оборудование в ведущем и отдаленном единицах. Принимающие отдаленные локомотивы отвечают на эти команды, чтобы применить тяговое усилие или тормозное усилие к железнодорожному составу, и извещают ведущую единицу о приеме и выполнении принятой команды. Ведущая единица также отправляет сообщения отдаленным единицам, включающие в себя сообщения-запросы состояния. Отдаленные единицы отвечают, отправляя сообщение-ответ о состоянии назад ведущей единице.
В железнодорожном составе, где два или более локомотива соединены вместе и, таким образом, работают одновременно через сигналы, переданные по их присоединенным линиям систем управления подвижными единицами (MU), один из локомотивов назначен в качестве управляющей отдаленной единицы относительно системы связи с распределенной энергией. Только управляемая отдаленная единица выполнена с возможностью приема команды, переданной ведущей единицей, и ответа ведущей единице с помощью соответствующих сообщений-ответов.
Одним из наиболее критичных аспектов работы железнодорожного состава является предсказуемая и успешная работа пневматической тормозной системы. Пневматическая тормозная система включает в себя локомотивные тормоза в каждом локомотиве (включая ведущий локомотив и все отдаленные локомотивы) и вагонные тормоза в каждом железнодорожном вагоне. Локомотивные тормоза ведущей единицы управляются машинистом локомотива в ответ на положение рукоятки тормозного рычага локомотива, а вагонные тормоза управляются в ответ на положение рукоятки рычага автоматического тормоза. Локомотивные тормоза могут также управляться рукояткой рычага автоматического тормоза.
Контроллер автоматического тормоза управляет давлением в тормозной магистрали с текучей средой, которая проходит по длине железнодорожного состава и находится в связи по текучей среде с системой вагонного тормоза для применения или отпускания вагонных тормозов в каждом железнодорожном вагоне в ответ на изменение давления в тормозной магистрали. Более конкретно, регулирующий клапан (обычно содержащий множество клапанов и взаимосвязанную систему трубопроводов) в каждом железнодорожном вагоне отвечает на изменения давления текучей среды в тормозной магистрали, применяя тормоза (в ответ на уменьшение давления текучей среды в тормозной магистрали) или отпуская тормоза (в ответ на увеличение давления текучей среды в тормозной магистрали). Текучая среда в тормозной магистрали обычно содержит сжатый воздух. В обычном железнодорожном составе, имеющем только локомотивы в головной части, машинист, управляющий рукояткой рычага автоматического тормоза в ведущем локомотиве, инициирует сброс давления, которое распространяется по тормозной магистрали к концу железнодорожного состава. Регулирующий клапан в каждом железнодорожном вагоне обнаруживает падение давления и в ответ на это подает сжатый воздух из локального резервуара железнодорожного вагона к тормозным цилиндрам колеса, которые, в свою очередь, передвигают тормозные колодки к колесам железнодорожного вагона. Резервуар железнодорожного вагона повторно заполняется воздухом, выводимым из тормозной магистрали во время нетормозных рабочих интервалов. Отпускание тормоза также управляется ведущим машинистом посредством управления рукояткой рычага автоматического тормоза, чтобы выполнить увеличение давления в тормозной магистрали. Увеличение давления определяют в железнодорожных вагонах, а в ответ тормозные колодки отходят от колес железнодорожного вагона. С некоторыми ограничениями, которые требуются для поддержания управления железнодорожным составом, в железнодорожном составе с распределенной энергией команда торможения или отпускания тормоза может быть отдана ведущим или отдаленным локомотивами.
Тормоза железнодорожного вагона могут быть применены в двух режимах, т.е. служебное торможение или экстренное торможение. В служебном торможении торомозные силы применяются к железнодорожному вагону, чтобы замедлить или заставить железнодорожный состав остановиться впереди по рельсовому пути. Во время служебных торможений давление тормозной магистрали медленно уменьшается, и в ответ на это постепенно применяются тормоза. Машинист управляет скоростью, с которой уменьшается давление, посредством действия рукоятки управления автоматическим тормозом. Перегрузочное торможение является служебным торможением, в котором давление тормозной магистрали уменьшается до нуля, но разрежение происходит с заданной скоростью, в отличие от экстренного торможения, как описано ниже, и железнодорожные вагоны не выпускают воздух из тормозной магистрали.
Экстренное торможение дает команду немедленно применить тормоза железнодорожного вагона посредством немедленного разрежения или отвода воздуха из тормозной магистрали. Когда железнодорожный вагон определяет заданную скорость уменьшения давления, указывающую на применение экстренного торможения, железнодорожный вагон также отводит воздух из тормозной магистрали, чтобы ускорить распространение разрежения тормозной магистрали по железнодорожному составу. К несчастью, так как тормозная магистраль проходит на несколько тысяч ярдов по железнодорожному составу, экстренное торможение не происходит мгновенно по всей длине тормозной магистрали. Таким образом, тормозные усилия неравномерно прикладываются к каждому железнодорожному вагону, чтобы остановить состав.
В железнодорожных составах с распределенной энергией торможение выполняется посредством отвода воздуха из тормозной магистрали и в ведущем, и в отдаленном локомотивах, таким образом, ускоряя отвод воздуха из тормозной магистрали и применяя тормоза в каждом железнодорожном вагоне, особенно для железнодорожных вагонов в конце железнодорожного состава. Как может быть оценено, отвод воздуха из тормозной магистрали только в ведущей единице в обычном железнодорожном составе требует распространения уменьшения давления в тормозной магистрали по длине железнодорожного состава, таким образом, замедляя торможение железнодорожных вагонов, отдаленных от ведущей единицы. Для железнодорожного состава с распределенной энергией с оперативным каналом связи между ведущим и отдаленным единицами, когда машинист железнодорожного состава отдает команду на торможение (например, служебное или экстренное торможение) посредством воздействия на рукоятку рычага управления автоматическим тормозом в ведущей единице, из тормозной магистрали отводится воздух, а команда торможения передается каждой отдаленной единице по радиочастотному каналу связи. В ответ каждая отдаленная единица также отводит воздух из тормозной магистрали. Таким образом, тормозное действие в отдаленных локомотивах следует за тормозным действием ведущей единицы в ответ на сигналы, переданные через систему связи.
Отпускание тормоза, инициированное в ведущей единице, также передается по радиочастотной линии связи отдаленным единицам, так что тормозная магистраль повторно заполняется из всех локомотивов, уменьшая время повторного заполнения тормозной магистрали.
Если экстренное торможение инициировано в ведущем локомотиве машинистом железнодорожного состава или из-за обнаруженного аварийного состояния, система радиочастотной связи отправляет сигнал экстренного торможения каждому из отдаленных локомотивов по радиочастотной линии связи. В ответ отдаленные локомотивы разрежают тормозную магистраль. Это обеспечивает возможность более быстрого выполнения экстренного торможения, так как тормозная магистраль разрежается из всех локомотивов быстрее, чем только из ведущего локомотива, как в обычном железнодорожном составе.
Во время определенных железнодорожных операций желательно поменять местами или реверсировать рабочее состояние ведущей и отдаленной единиц, так что ведущая единица в голове железнодорожного состава реконфигурируется как отдаленная единица в конце железнодорожного состава, а отдаленная единица в конце железнодорожного состава реконфигурируется как ведущая единица. Например, когда разгружается угольный железнодорожный состав на подъездной ветке электростанции, железнодорожный состав проходит через площадь разгрузки в одном направлении, пока каждый железнодорожный вагон не разгрузит уголь. Затем железнодорожный состав дает задний ход к выходу ветки в обратном направлении, т.е. ведущий локомотив толкает железнодорожный состав в обратном направлении к выходу ветки. Если железнодорожный состав представляет собой железнодорожный состав с распределенной энергией, желательно поменять местами функциональность ведущей и конечной отдаленной единиц железнодорожного состава, чтобы избежать работы обеих этих единиц в обратном направлении. Железнодорожный состав может затем выезжать из подъездной ветки с помощью головной конечной единицы, работающей в прямом направлении, так что железнодорожный состав скорее тянется по рельсовому пути, чем толкается с конца. Подобная ситуация возникает, когда железнодорожный состав с распределенной энергией входит на подъездную ветку шахты, где железнодорожные вагоны загружаются материалом, извлекаемым из шахты. Система связи LOCOTROL® имеет характерную особенность, которая позволяет каждому локомотиву в железнодорожном составе работать в качестве ведущей единицы или в качестве отдаленной единицы, хотя единица может быть реконфигурирована или перепрограммирована, чтобы изменить свое рабочее состояние.
Как может быть оценено специалистами в области техники, существуют другие сценарии работы, к которым могут быть применены учения настоящего изобретения. Например, желательно повернуть железнодорожный состав с распределенной энергией, движущийся на запад по маршруту восток-запад, на движение на север по пересекающему маршруту север-юг. Предполагая, что путь север-юг имеет вход только на южной границе с маршрута восток-запад, железнодорожный состав переводится на направляющийся на юг отрезок пути север-юг, так что ведущий локомотив входит в направляющийся на юг отрезок пути первым, а локомотив в конце железнодорожного состава входит на направляющийся на юг отрезок пути последним. После того как железнодорожный состав целиком вошел на направляющийся на юг отрезок пути, стрелка пути функционирует так, чтобы выровнять направляющийся на юг отрезок пути с направляющимся на север отрезком пути. Чтобы отправиться на север, ведущая единица теперь в конце железнодорожного состава работает в реверсе. Единица в конце железнодорожного состава также работает в реверсе и выводит железнодорожный состав из направляющегося на юг отрезка пути в направляющийся на север отрезок пути. Здесь также будет предпочтительно поменять местами функциональности ведущего и отдаленного локомотива, так что оба работают в прямом направлении, и локомотив в голове железнодорожного состава является ведущим локомотивом относительно системы связи с распределенной энергией.
Это не простой вопрос - повернуть в обратном направлении железнодорожный состав с распределенной энергией, который использует систему связи для передачи сигналов между ведущей единицей и отдаленными единицами. Каждая отдаленная единица требует информацию об идентификации ведущей единицы, чтобы обработать и ответить на принятые сообщения, и каждая отдаленная единица выполнена с возможностью ответа на команды и сообщения только от этой ведущей единицы. Таким образом, когда ведущая единица заменена, каждая из отдаленных единиц должна быть реконфигурирована, чтобы принимать команды и сообщения от новой ведущей единицы, т.е. информация об идентификации для новой ведущей единицы должна быть доставлена каждому из отдаленных локомотивов. Также прежняя ведущая единица должна быть реконфигурирована на функциональность отдаленной единицы. Направление работы (также именуется как ориентация направления железнодорожного состава) определенных локомотивов также должно быть изменено на противоположное.
В железнодорожном составе с распределенной энергией, имеющем локомотив в заднем конце железнодорожного состава, обычной практикой для бригады поезда является выполнение следующих этапов, чтобы «повернуть в обратном направлении» состав, разрешая, таким образом, работу новой ведущей единицы, которая была прежде отдаленной единицей в конце железнодорожного состава.
Ведущая единица отсоединяется от отдаленных единиц, т.е. ведущая единица реконфигурируется так, что она не может передавать сигналы отдаленным единицам, а отдаленные единицы реконфигурируются так, что они не могут принимать сигналы от ведущей единицы. По причинам безопасности, когда эти линии связи разорваны, экстренное или перегрузочное торможение автоматически совершается, чтобы предотвратить движение железнодорожного состава. Как экстренное, так и перегрузочное торможение исчерпывают почти весь воздух в тормозной магистрали и значительный объем воздуха из резервуаров железнодорожных вагонов.
После разъединения железнодорожного состава прежняя ведущая единица реконфигурируется, чтобы работать в качестве дополнительной отдаленной единицы для приема команд и сообщений от новой ведущей единицы. Процесс реконфигурации включает в себя уведомление новой отдаленной единицы об уникальном идентификаторе, связанном с новой ведущей единицей, т.е. дорожном номере локомотива. Все отдаленные единицы используют информацию об идентификации ведущей единицы, чтобы подтвердить, что принятые сообщения или команды были переданы от ведущего локомотива. Без этого признака подтверждения отдаленный локомотив может среагировать на команду или сообщение, переданное от ведущей единицы другого железнодорожного состава в районе. Процесс реконфигурации также включает в себя реверсирование рабочего направления прежней ведущей единицы. То есть, если локомотив работал в прямом направлении, он конфигурируется, чтобы работать в обратном направлении. Однако во время работы отдаленной единице может быть передана команда работать в прямом направлении, всякий раз, когда необходимо, а единица может быть правильно сконфигурирована относительно направления работы ведущей единицы, так что команды, выданные ведущей единицей, правильно воспринимаются в отдаленной единице.
После завершения процесса реконфигурации, чтобы управлять ведущей единицей как отдаленной единицей, бригада перемещается в новую ведущую единицу железнодорожного состава.
Если железнодорожный состав с распределенной энергией включает в себя отдаленные единицы в середине железнодорожного состава, они должны быть также вручную реконфигурированы, чтобы обеспечить связь с новой ведущей единицей. Обычно это выполняется бригадой, когда они переходят от прежней ведущей единицы к новой ведущей единице. Реконфигурация отдаленных единиц в середине железнодорожного состава включает в себя снабжение каждой отдаленной единицы в середине железнодорожного состава информацией об идентификации новой ведущей единицы. Например, дорожный номер новой ведущей единицы может использоваться в качестве информации об идентификации. Дополнительно процесс реконфигурации требует реверсирования рабочего направления каждой отдаленной единицы в середине железнодорожного состава. То есть, если отдаленная единица была ранее сконфигурирована, чтобы работать в прямом режиме, когда прежняя ведущая единица работала в прямом направлении, отдаленная единица реконфигурируется, чтобы работать в реверсивном режиме, когда новая ведущая единица работает в прямом режиме. Проще говоря, каждая отдаленная единица в середине железнодорожного состава должна быть сконфигурирована, чтобы работать либо в прямом режиме, либо в обратном режиме, когда ведущая единица работает в прямом направлении, так что прямые и реверсивные команды, выданные ведущей единицей, правильно воспринимаются в отдаленных единицах в середине железнодорожного состава.
Когда бригада прибывает в новую ведущую единицу, она реконфигурирует прежнюю отдаленную единицу, чтобы работать в качестве новой ведущей единицы. Этот процесс включает в себя изменение направления функционирования новой ведущей единицы и выполнение операции сопряжения железнодорожного состава, чтобы связать ведущий и отдаленные локомотивы в систему связи.
Процесс сопряжения конфигурирует систему связи, по которой ведущее и отдаленные единицы (включающие в себя новую отдаленную единицу, которая ранее работала как ведущая единица) передают команды и сообщения. Процесс сопряжения начинается уведомлением ведущей единицы о дорожных номерах отдаленных единиц и созданием и отправкой сообщения по линии в соответствии с заданным форматом из новой ведущей единицы последовательно каждой отдаленной единице. При приеме сообщения каждая отдаленная единица определяет, соответствуют ли определенные уникальные поля адреса/идентификации в сообщении информации об адресе/идентификации принимающей отдаленной единицы и полям адреса/идентификации отправляющей ведущей единицы. Этот процесс сравнения адреса/идентификации гарантирует, что принятое сообщение было предназначено для принимающей отдаленной единицы и было передано ведущей единицей железнодорожного состава. Если информация об адресе/идентификации не согласована, отдаленная единица остается в несвязанном состоянии, т.е. сообщения или команды не могут обмениваться между ведущей единицей и несвязанной отдаленной единицей во время работы железнодорожного состава.
Если сравненные поля адреса/идентификации совпадают, отдаленная единица запускает таймер связи и создает, и передает ответное сообщение по линии, имеющее заданный формат и включающее в себя информацию об адресе/идентификации передающей отдаленной единицы. Ведущая единица принимает ответное сообщение по линии и сравнивает поля адреса/идентификации в сообщении с сохраненными значениями, чтобы подтвердить, что сообщение было предназначено для принимающей ведущей единицы и было передано от соответствующей отдаленной единицы. Если процесс сравнения не заканчивается совпадением информации об адресе/идентификации, ведущая единица и отдаленная единица не связываются.
Если поля адреса/идентификации в ответном сообщении по линии согласуются, ведущая единица передает сообщение-команду отдаленной единице, которая отправила ответное сообщение по линии связи. В принимающей отдаленной единице команда выполняет последовательность установления линии связи и переводит отдаленную единицу в связанное состояние. После этого сообщения могут отправляться и приниматься между ведущей единицей и связанной отдаленной единицей. Процесс продолжается до тех пор, пока все отдаленные единицы в железнодорожном составе не будут связаны с ведущей единицей. После того как локомотивы связаны, все отдаленные единицы могут распознать команды и сообщения, принятые от ведущей единицы, с которой они связаны, а ведущая единица может распознать сообщения, принятые от отдаленных единиц, с которыми она связана.
После того как железнодорожный состав сопряжен, применение экстренного или перегрузочного торможения, которое было передано в начале процесса обмена местами, отпускается посредством наполнения тормозной магистрали до ее номинального значения давления (т.е. около 90 пси в одном варианте осуществления). После выполнения тестирования тормозной магистрали, описанного ниже, система связи устанавливается в рабочий режим, и бригада в новой ведущей единице может использовать тяговый подвижной состав, чтобы перемещать железнодорожный состав.
Обычно этот процесс предшествующего уровня техники обмена местами ведущей и отдаленных единиц отнимает 20-60 минут дополнительной задержки перед тем, как железнодорожный состав сможет отправиться. Продолжительность фактических задержек изменяется в зависимости от длины железнодорожного состава (которая влияет на время повторного заполнения тормозной магистрали), утечки по тормозной магистрали (требующей более длительного периода для того, чтобы тормозная магистраль заполнилась с разреженного состояния из-за экстренного или перегрузочного торможения), окружающей температуры и числа отдаленных единиц в железнодорожном составе.
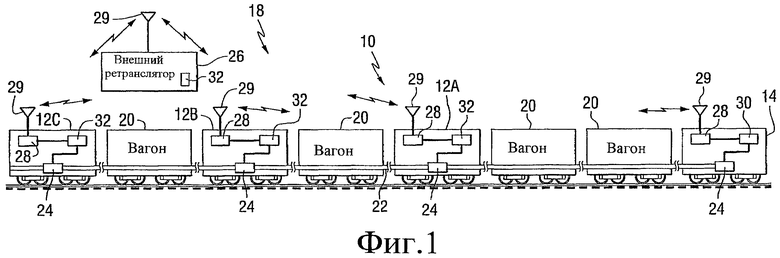
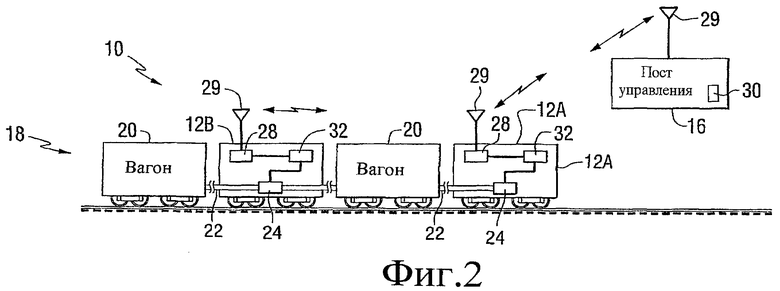
На фиг.1 и 2 схематично показана система 10 связи в железнодорожном составе с распределенной энергией для управления одним или более отдаленными единицами 12A-12C либо из ведущей единицы 14 (фиг.1), либо с поста 16 управления (фиг.2) в железнодорожном составе с распределенной энергией. Учения настоящего изобретения могут быть применены к системе 10 связи с распределенной энергией. В одном варианте осуществления канал связи системы 10 связи содержит один полудуплексный канал связи, имеющий диапазон частот в три кГц, в котором сообщения и команды содержат поток последовательных двоичных данных, зашифрованный с использованием частотной манипуляции. Различные позиции битов передают информацию относительно типа передачи (например, сообщение, команда, сигнал тревоги), независимого сообщения, команды или сигнала тревоги, адреса принимающего модуля, адреса отправляющего модуля, обычные стартовые и стоповые биты и биты обнаружения/коррекции ошибки. Детали сообщений и команд, предоставленных системой, и формат передачи индивидуальных сообщений и команд описаны подробно в патенте США 4,582,280, который включен здесь посредством ссылки.
Следует понимать, что единственная разница между системами на фиг.1 и 2 заключается в том, что выдача команд и сообщений из ведущей единицы 14 на фиг.1 заменена постом 16 управления на фиг.2, и определенные соединения системы на фиг.1 исключены. Обычно пост 16 управления связывается с ведущей единицей 14, которая, в свою очередь, связана с отдаленными единицами 12A-12C.
Железнодорожный состав 18, показанный на фиг.1 и 2, дополнительно содержит множество железнодорожных вагонов 20, помещенных между отдаленными единицами 12A и 12B и между отдаленными единицами 12B и 12C (на фиг.1). Размещение локомотивов и вагонов, показанных на фиг.1 и 2, является просто примерным, тогда как настоящее изобретение может быть применено к другим размещениям локомотивов/железнодорожных вагонов. Вагоны 20 снабжены системой воздушного тормоза (не показана на фиг.1 и 2), которая использует пневматические тормоза железнодорожного вагона в ответ на падение давления в тормозной магистрали 22 и отпускает пневматические тормоза при росте давления в тормозной магистрали 22. Тормозная магистраль 22 проходит по длине железнодорожного состава для передачи изменений давления воздуха, определенных отдельными рычагами 24 управления пневматического тормоза в ведущей единице 14 и отдаленных единицах 12A, 12B и 12C.
Внешний транслятор 26 может быть расположен на дистанции радиосвязи железнодорожного состава 18 для ретрансляции сигналов связи между ведущей единицей 14 и одной из отдаленных единиц 12A, 12B и 12C. Внешний ретранслятор 26 обычно установлен в местоположении, где непосредственные связи между ведущей единицей 14 и отдаленными единицами 12A-12C затруднены, например, когда железнодорожный состав 18 проходит через туннель.
Ведущая единица 14, отдаленные единицы 12A, 12B и 12C, внешний ретранслятор 26 и пост 16 управления снабжены приемопередатчиком 28, работающим с антенной 29, для приема и передачи сигналов связи по каналу связи.
Приемопередатчик 28 ведущей единицы связан с ведущей станцией 30 для формирования и выдачи команд и сообщений из ведущей единицы 14 отдаленным единицам 12A-12C. Команды формируются в ведущей станции 30 в ответ на управление машинистом тяговой энергией и рычагами торможения в ведущей единице 14, как описано выше. Каждая отдаленная единица 12A-12С и внешний ретранслятор 26 содержат отдаленную станцию 32 для обработки и ответа на передачи из ведущей единицы 14 и для выдачи ответных сообщений и команд.
Четыре первичных типа радиопередач, передаваемых системой связи, включают в себя: (1) сообщения по линии от ведущей единицы 14 к каждой из отдаленных единиц 12A-12C, которые устанавливают систему связи между ведущей единицей и отдаленными единицами 12A-12C, (2) ответные сообщения по линии, которые указывают прием и выполнение сообщения по линии, (3) команды от ведущей единицы 14, которые управляют одной или более функциями (например, применением тяговой энергии или торможением) одной или более отдаленных единиц 12A-12C и (4) сообщения о состоянии и сигнальные сообщения, передаваемые одной или более отдаленными единицами 12A-12C, которые обновляют или обеспечивают ведущую единицу 14 необходимой рабочей информацией относительно одной или более отдаленных единиц 12A-12C.
Каждое сообщение и команда, отправленная из ведущей единицы 14, пересылается всем отдаленным единицам 12A-12C и включает в себя идентификатор ведущей единицы. Сообщения и сигналы тревоги, отправляемые от одной из отдаленных единиц 12A-12C, включают в себя адрес отправляющей единицы. В результате ранее завершенного процесса установления связи принимающая единица, т.е. ведущий или отдаленный локомотив, может определить, был ли он заданным получателем полученной передачи, на основании идентификации отправляющей единицы, включенной в сообщение, и может соответственно ответить. Эти четыре типа сообщений, включающие в себя адресную информацию, включенную в каждый тип, гарантируют безопасную линию передачи, которая имеет низкую вероятность разрыва от сигналов помех на дистанции радиопередачи железнодорожного состава 18, обеспечивает управление отдаленными единицами 12A-12C из ведущей единицы 14 и обеспечивает информацию о работе отдаленной единицы ведущей единице 14.
Хотя большинство команд выдаются ведущей единицей и передаются отдаленным единицам для выполнения, как описано выше, существует одна ситуация, когда отдаленная единица выдает команды другим отдаленным единицам и ведущей единице. Если отдаленная единица определяет условие, которое предписывает экстренное торможение, отдаленная единица передает команду экстренного тормоза всем другим единицам в железнодорожном составе. Команда включает в себя идентификацию ведущего локомотива железнодорожного состава и, следовательно, будет выполняться в каждой отдаленной единице так, как если бы команда была выдана ведущей единицей.
Системы связи с распределенной энергией работают в одном из двух режимов, синхронном управлении и независимом управлении. При синхронном управлении отдаленные единицы следуют за положением дросселя ведущей единицы. Если машинист перемещает рукоятку дросселя с зубца пятой позиции на зубец седьмой позиции, система связи отправляет команду каждой из включенных отдаленных единиц работать на зубце седьмого дросселя. Если машинист перемещает рукоятку дросселя в позицию динамического торможения (т.е. где тяговые двигатели работают так, чтобы обеспечить силу торможения железнодорожному составу), система связи отдает команду каждой отдаленной единице применять такое же динамическое торможение.
Система связи с распределенной энергией также обеспечивает работу в независимом режиме управления дросселем, когда машинист разделяет железнодорожный состав в переднюю группу и заднюю группу и назначает отдаленные единицы каждой из двух групп. Назначения являются динамически управляемыми машинистом, так что локомотивы могут быть повторно назначены из передней группы в заднюю группу и наоборот, пока железнодорожный состав работает.
Дроссели отдаленных единиц, назначенные передней группе, следуют позициям дросселя ведущего локомотива. Дроссели отдаленных единиц задней группы управляются независимо от дросселей передней группы. Этот функциональный режим может быть запущен, например, когда железнодорожный состав спускается с горы. Когда железнодорожный состав поднимается в гору, все отдаленные единицы и ведущая единица обеспечивают максимальную тяговую энергию (на зубце 8-й позиции дросселя). Когда ведущая единица переходит через вершину, дроссель ведущего локомотива перемещается в позицию динамического торможения, в то время как для отдаленных единиц желательно продолжать применять движущую силу, чтобы толкать железнодорожный состав в гору. Когда отдаленная единица в середине железнодорожного состава переходит через вершину, она переназначается в переднюю группу, так что динамические тормоза применяются в этой отдаленной единице. Процесс переназначения отдаленных единиц из задней группы в переднюю группу продолжается до тех пор, пока последняя отдаленная единица не будет переназначена. В независимом режиме сообщение-команда, переданное ведущей единицей содержит поле для каждой отдаленной единицы в железнодорожном составе. При приеме в отдаленной единице, подходящее поле проверяется, и отдаленная единица управляется согласно передней или задней группе.
Сущность изобретения
Первый вариант осуществления настоящего изобретения включает в себя железнодорожный состав, имеющий, по меньшей мере, два разнесенных локомотива, выполненных с возможностью работы в качестве ведущего и отдаленного, в котором первый локомотив работает как ведущая единица для управления работой второго локомотива, работающего в качестве отдаленной единицы, и в котором первый и второй локомотивы обмениваются информацией и командами по каналу связи, управляемому системой связи, причем железнодорожный состав дополнительно содержит множество железнодорожных вагонов, при этом первый локомотив, второй локомотив и железнодорожные вагоны, каждый, дополнительно содержат систему торможения для торможения железнодорожного состава под управлением вручную управляемой рукоятки тормоза, имеющей ведущее положение и отдаленное торможение, расположенной в первом и втором локомотивах. Способ согласно первому варианту осуществления заменяет состояние первого и второго локомотивов так, что первый локомотив работает как отдаленная единица, а второй локомотив работает как ведущая единица. Способ включает определение того, являются ли приемлемыми текущие рабочие условия железнодорожного состава для замены состояния первого и второго локомотивов, применение тормозов в первом и втором локомотивах и железнодорожных вагонах, приостановление статуса ведущего первого локомотива, конфигурирование первого локомотива для работы в качестве отдаленной единицей, из второго локомотива присвоение первому локомотиву статуса отдаленного, а второму локомотиву статуса ведущего и проведение тестирования системы торможения.
Другой вариант осуществления включает в себя систему связи для железнодорожного состава, имеющего первый и второй разнесенные локомотивы, каждый из которых выполнен с возможностью работы в качестве ведущего и отдаленного, и, по меньшей мере, один локомотив в середине железнодорожного состава, расположенный между ними, в которой первый локомотив работает как ведущая единица для управления работой второго локомотива и, по меньшей мере, одного локомотива в середине железнодорожного состава, причем оба работают как отдаленные единицы. Система связи содержит канал связи, станцию в первом локомотиве, выполненную с возможностью ответа на входной сигнал машиниста железнодорожного состава для выполнения функции замены локомотива, дополнительно содержит передачу сигналов по каналу связи ко второму локомотиву и локомотиву в середине железнодорожного состава и прием сигналов от локомотива в середине железнодорожного состава и станцию во втором локомотиве для выполнения функции замены локомотива посредством передачи сигналов первому локомотиву и локомотиву в середине железнодорожного состава по каналу связи, причем после выполнения функции замены первый локомотив работает как отдаленная единица, локомотив в середине железнодорожного состава работает как отдаленная единица, а второй локомотив работает как ведущая единица.
Краткое описание чертежей
Настоящее изобретение может быть более легко понято, а дополнительные преимущества и его использование более легко оценены, при рассмотрении следующего подробного описания вместе с последующими чертежами, на которых:
Фиг.1 и 2 представляют собой железнодорожный состав, к которому могут быть применены учения настоящего изобретения.
Фиг.3 представляет собой блок-схему, показывающую технологию обмена местами локомотивов согласно учениям настоящего изобретения.
В соответствии с общей практикой различные описанные признаки не начерчены по масштабу, а начерчены для того, чтобы подчеркнуть конкретные признаки, относящиеся к изобретению.
Ссылочные позиции обозначают похожие элементы на всех чертежах и в тексте.
Подробное описание изобретения
Перед описанием подробно конкретного способа и устройства для обмена местами ведущего и отдаленного локомотивов в железнодорожном составе с распределенной энергией в соответствии с настоящим изобретением следует заметить, что настоящее изобретение первоначально находится в новой комбинации аппаратных и программных элементов, относящихся к способу и устройству обмена местами локомотивов. Соответственно, чтобы не затруднять понимание изобретения конструктивными элементами, которые станут легко очевидны специалистам в области техники, имеющие преимущества от описания здесь, в описании, которое следует далее, определенные аппаратные и программные элементы были описаны менее подробно, в то время как чертежи и описание описывают более подробно другие элементы и этапы, уместные для того, чтобы понять изобретение. Следующие варианты осуществления не предназначены для определения ограничений, как структуры или использование изобретения, а только для обеспечения примерных конструкций. Варианты осуществления являются скорее рекомендуемыми, чем обязательными, и скорее иллюстративными, чем исчерпывающими.
Согласно учениям настоящего изобретения система связи железнодорожного состава с распределенной энергией дополнена инициируемой пользователем функцией, которая реверсирует состояние ведущей и отдаленных единиц в конце железнодорожного состава, чтобы обеспечить работу железнодорожного состава из прежнего отдаленного локомотива в конце железнодорожного состава, который реконфигурируется для работы в качестве ведущего локомотива. Эта новая функция устраняет несколько этапов, необходимых в предшествующем уровне техники для обмена местами ведущего и отдаленного локомотивов, и выполняет функцию обмена местами за меньшее время. Функция обмена местами согласно настоящему изобретению не требует восстановления от выработанной тормозной магистрали (экстренное или перегрузочное торможение, при котором давление тормозной магистрали по существу равно нулю), что является одним фактором, содействующим сокращению продолжительности. Вместо этого давление тормозной магистрали восстанавливается с номинального уменьшения давления тормозной магистрали, связанного со служебным торможением. Как известно в области техники, повторное повышение давления в тормозной магистрали после применения служебного торможения является более быстрым, чем повторное повышение давления после применения экстренного или перегрузочного торможения.
Фиг.3 представляет собой блок-схему, показывающую первый вариант осуществления способа для выполнения функции замены локомотива согласно учениям настоящего изобретения. В одном варианте осуществления способ на фиг.3 реализуют в микропроцессоре и ассоциативных элементах памяти в локомотивах железнодорожного состава, например, в ведущей станции 30 и отдаленной станции 32. В таком варианте осуществления этапы на фиг.3 представляют программу, сохраненную в элементе памяти и исполняемую в микропроцессоре. При выполнении в микропроцессоре программный код конфигурирует микропроцессор, чтобы создать логические и арифметические операции для выполнения этапов блок-схемы. Изобретение может также быть осуществлено в форме компьютерного программного кода, написанного на любом известном компьютерном языке, содержащем инструкции, включенные на материальные носители, такие как дискеты, CD диски, жесткие диски, DVD диски, съемные носители или любой другой машиночитаемый носитель данных. Когда программный код загружается и выполняется компьютером общего назначения или специализированным компьютером, компьютер становится устройством для применения изобретения. Изобретение может также быть осуществлено в форме компьютерного программного кода, например, либо сохраненного на носителе данных, загруженного в и/или выполняемого компьютером, либо переданным через средство передачи, например, по электрическим проводам или кабелю, через оптическое волокно или через электромагнитное излучение, причем когда компьютерный программный код загружен в и выполняется компьютером, компьютер становится устройством для применения изобретения.
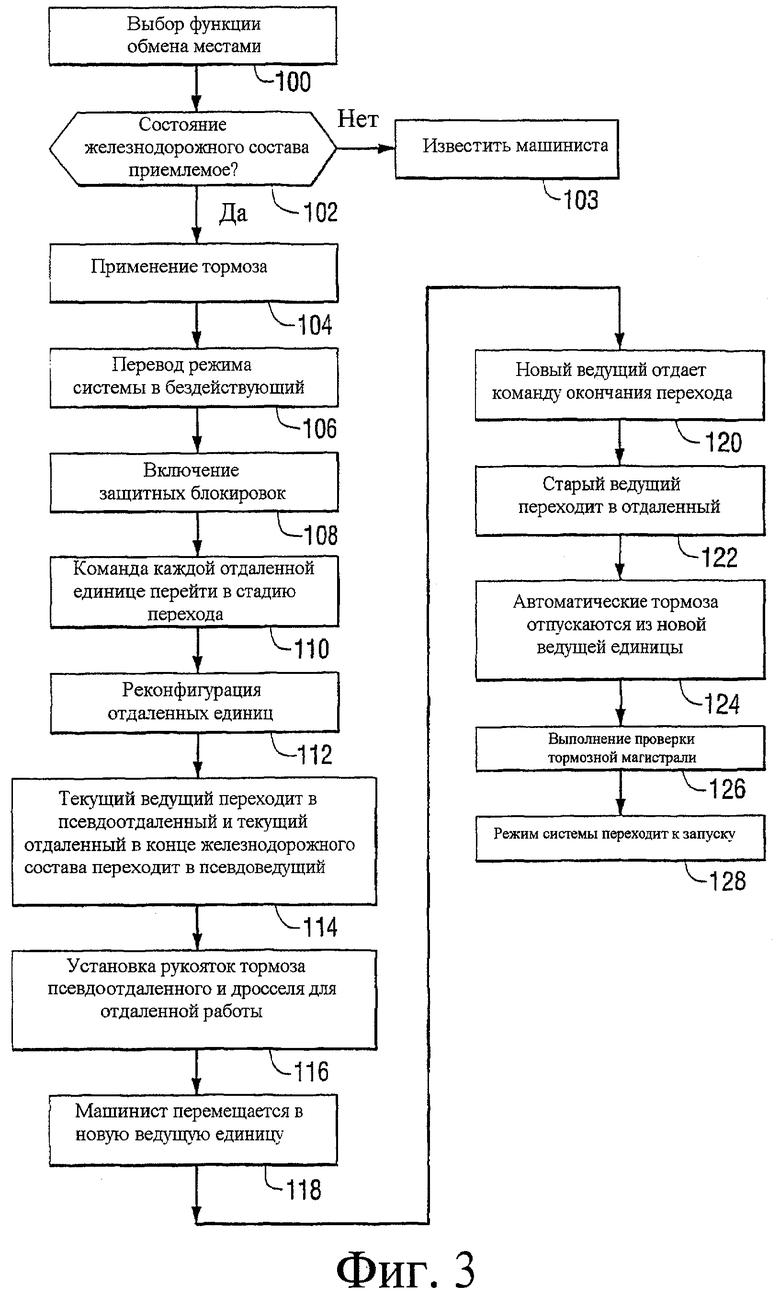
Блок-схема на фиг.3 начинается на этапе 100, где машинист локомотива в текущей ведущей единице выбирает функцию обмена местами для выполнения системой связи. На этапе 102 программа определяет, являются ли приемлемыми условия железнодорожного состава для осуществления функции обмена местами. Отрицательный ответ с этапа 102 решения извещает машиниста о том, что условия являются неприемлемыми, на этапе 103. Как правило, условия, требуемые для осуществления функции обмена местами, включают в себя: дроссель ведущего локомотива в нейтральном положении, независимую от ведущего локомотива (т.е. локомотива) установку тормоза, ведущий локомотив с нулевой скоростью и рукоятку реверсивного механизма ведущего локомотива (для выбора прямого или реверсивного направления работы) в центральном нерабочем положении.
Если условия железнодорожного состава приемлемы, обработка переходит к этапу 104, где команда на применение полного служебного торможения отдается функцией обмена местами или выполняется вручную машинистом железнодорожного состава (в другом варианте осуществления применение полного служебного торможения не выполняется, а вместо этого давление в тормозной магистрали уменьшается до давления, большего, чем применение полного служебного торможения). Команда передается всем отдаленным единицам через систему связи для выполнения. Все локомотивы железнодорожного состава удерживают это торможение в течение периода обмена местами (т.е. пока условия железнодорожного состава не предписывают иное).
На этапе 106 системе связи дается команда перейти в бездействующий режим и ожидать действий машиниста, как описано ниже для завершения функции обмена местами.
На этапе 108 включаются защитные блокировки для поставленного на стоянку железнодорожного состава. Как правило, блокировки запрещают применение тягового усилия и запрещают отпускание тормоза, предотвращая, таким образом, движение железнодорожного состава, пока период перемещения не истечет, и система связи снова будет действующей. В других вариантах осуществления дополнительные или другие блокировки могут быть определены согласно текущим условиям железнодорожного состава и установившейся практике работы железнодорожного машиниста/собственника, особенно признается, что в течение определенных периодов функции обмена местами машиниста может не быть в вагоне железнодорожного состава, так как он/она будет в пути от прежней ведущей единицы к новой ведущей единице. В одном варианте осуществления защитные блокировки включают в себя выключение или отключение отдаленных единиц. В этом состоянии отдаленные единицы могут реагировать на изменения давления в тормозной магистрали, но не могут управлять давлением в тормозной магистрали (кроме команды экстренного торможения).
На этапе 110 текущая ведущая единица отдает команду каждой отдаленной единице перейти в переходное состояние, т.е. система связи переходит к конфигурированию с новой ведущей единицей для железнодорожного состава. Согласно системе связи LOCOTROL® этап 110 выполняется с использованием модифицированных сообщений по линии и ответа по линии, как описано выше. Модифицированное сообщение линии, переданное от текущего ведущего локомотива, извещает все отдаленные единицы подряд о том, что новая ведущая единица будет определена, и обеспечивает отдаленные единицы адресом или другой информацией об идентификации новой ведущей единицы. В ответ на модифицированное сообщение линии связи каждая отдаленная единица подряд передает сообщение-ответ по линии связи назад текущей ведущей единице, указывающее, что сообщение по линии связи было принято и правильно обработано, и дополнительно включает в себя адрес передающей отдаленной единицы.
Этап 112 изображает реконфигурацию отдаленной единицы, как соответствующую, в ответ на модифицированное сообщение линии связи. Отдаленные единицы в середине железнодорожного состава реконфигурируются, чтобы принимать команды и сообщения от новой ведущей единицы, т.е. адреса новой ведущей единицы, и могут реверсировать свою ориентацию направления железнодорожного состава. Согласно определенным вариантам осуществления отдаленные единицы в середине железнодорожного состава могут быть осведомленными о своем положении в середине железнодорожного состава либо в результате первоначального процесса установления линии связи, либо в процессе обмена местами.
Во время этой стадии перемещения любая отдаленная единица (и текущая ведущая единица) может формировать применение экстренного торможения через тормозную магистраль (а в одном варианте осуществления также через линию радиосвязи согласно способу, описанному выше, вместе с обычной работой системы связи с распределенной энергией) в ответ на событие аварийного состояния в железнодорожном составе. В ответ на экстренное торможение остающиеся отдаленные единицы и текущая ведущая единица разрежают тормозную магистраль, чтобы выполнить экстренное торможение во всех железнодорожных вагонах и в локомотивах. Как правило, повреждения железнодорожного состава, которые могут привести к потере управления железнодорожным составом, когда определяются в отдаленной единице (или ведущей единице), будут формировать экстренное торможение.
Согласно одному варианту осуществления настоящего изобретения отдаленные единицы и текущая ведущая единица также могут быть выполнены с возможностью инициирования перегрузочного торможения.
Как указано на этапе 114, прежняя ведущая единица переходит в псевдоотдаленное состояние и подсказывает машинисту поместить рукоятки автоматического и независимого тормоза в положение отдаленной работы для работы в качестве отдаленной единицы (см. этап 116). Обычно для отдаленной работы рукоятка автоматического тормоза находится в выключенном положении рукоятки, а независимые тормоза находятся в положении расцепления. Всякий раз, когда рукоятки автоматического и независимого тормоза находятся в положении отдаленной работы, автоматический и независимый тормоза применяются в ответ на команду, выданную ведущей единицей и принятую отдаленной единицей по линии связи. Подобно отдаленным единицам в середине железнодорожного состава псевдоотдаленная единица может отдавать команды на применения экстренного торможения через тормозную магистраль и через систему связи, пока выполняется переходная фаза.
Для отдаленной работы рукоятка дросселя устанавливается в нейтральное положение, а рукоятка реверсивного механизма устанавливается в центральное положение (направление не выбрано) или убирается. Дроссель и реверсивный механизм, таким образом, управляются в ответ на команду, выданную ведущей единицей и принятую отдаленной единицей по линии связи.
Также на этапе 114 текущая отдаленная единица в конце железнодорожного состава переходит к работе в качестве псевдоведущего. Во время этого состояния псевдоведущая единица может отдавать команду применения экстренного торможения (или перегрузочного торможения согласно одному варианту осуществления). Также согласно одному варианту осуществления псевдоведущая единица формирует периодические проверки состояния железнодорожного состава и системы связи и наблюдает за защитными блокировками. Пневматический тормоз в этой единице реагирует на команды, как будто это отдаленная единица, во время этого переходного состояния.
Ни один из локомотивов в железнодорожном составе не может отдавать команды на отпускание тормоза во время фазы обмена местами. Машинист железнодорожного состава может отдать команду на тяговое усилие непосредственно в псевдоведущей единице и в текущей ведущей единице, но система связи не распространит команду тяги отдаленным единицам.
Этап 118 указывает, что машинист железнодорожного состава перемещается из прежней ведущей единицы в новую ведущую единицу. После посадки в новую ведущую единицу машинист подтверждает, что система связи все еще находится в состоянии перехода. Из новой ведущей единицы машинист отправляет команду прежней ведущей единице и отдаленным единицам для окончания переходного состояния, устанавливая систему связи в обычный рабочий режим (см. этап 120). При приеме команды окончания перехода прежняя ведущая единица переходит к стандартной функциональности отдаленной единицы, как указано на этапе 122. Отметим, что для машиниста железнодорожного состава необязательно реконфигурировать отдаленные единицы в середине железнодорожного состава перед началом работы железнодорожного состава, как требуется в уровне техники.
В новой ведущей единице машинист отпускает автоматические тормоза и ожидает, пока тормозная магистраль заполнится от давления служебного торможения до состояния полностью накачанного давления.
На этапе 126 машинист выполняет обычную проверку целостности тормозной магистрали или проверочное тестирование железнодорожного состава из новой ведущей единицы. При успешном завершении тестирования машинист устанавливает систему связи в режим запуска, как указано на этапе 128. И система связи, и система торможения теперь готовы для движения железнодорожного состава.
Один пример проверки целостности тормозной магистрали выполняется следующим образом. Проверка согласно настоящему изобретению выполняется для определения, находятся ли пневматические тормоза железнодорожного состава в состоянии для безопасного функционирования. Более конкретно, проверка тормозной магистрали определяет, что тормозная магистраль является целостной от головы до конца железнодорожного состава, и что датчик измерения потока в тормозной магистрали в каждом из отдаленных локомотивов работает правильно. В частности, датчик измерения потока в прежней ведущей единице, которая теперь работает как отдаленная, проверяется, чтобы определить его правильную работу.
Проверка начинается после того, как тормозная магистраль повторно заполнилась (или когда скорость, с которой воздух подается в тормозную магистраль, упала ниже заданного значения, указывающего, что тормозная магистраль практически полностью повторно заполнена). Ведущая единица 14 отправляет сообщение отдаленным единицам 12A-12C через систему связи, извещающее о том, что должна быть начата проверка тормозной магистрали. Затем машинистом вручную отдается команда на применение служебного торможения, инициируя работу автоматических пневматических тормозов в ведущей единице, или применение служебного торможения инициируется автоматически без вмешательства машиниста. В любом случае, применение служебного торможения инициируется через тормозную магистраль; ведущая единица 14 не передает команду торможения по каналу связи отдаленным единицам 12A-12C. Ведущая единица 14 отправляет сообщение, совпадающее с инициацией применения служебного торможения, извещающее отдаленные единицы 12A-12C о том, чтобы ожидать изменение скорости потока в тормозной магистрали, когда давление тормозной магистрали снижается, чтобы выполнить служебное торможение. Таймер запускается одновременно с торможением в ведущей единице 14 и в отдаленных единицах относительно извещающего сообщения о проверке тормозов, переданного ведущей единицей 14.
Когда снижение давления в тормозной магистрали достигает первой отдаленной единицы 12A, отдаленная единица 12A пытается заполнить тормозную магистраль, чтобы компенсировать снижение давления. Датчик потока в отдаленной единице 12A измеряет скорость потока, с которой отдаленная единица 12A наполняет тормозную магистраль. Если достаточная скорость потока определена в соответствии с заданным критерием скорости потока, соответствующее сообщение форматируется и передается из отдаленной единицы 12A ведущей единице 14. Отдаленная единица 12A также инициирует служебное торможение, которое распространяется в заднюю часть железнодорожного состава 18. Каждая отдаленная единица подряд определяет снижение давления тормозной магистрали, повторно заполняет тормозную магистраль, отправляет сообщение ответа ведущей единице 14 и инициирует служебное торможение. Таймер в каждой отдаленной единице разрешает отдаленной единице извещать ведущую единицу о времени между приемом команды ведущей единицы и определением отдаленной единицей скорости потока. Этот процесс позволяет ведущей единице определить порядок отдаленных единиц в железнодорожном составе, так как отдаленные единицы передают свою идентификацию в ответном сообщении.
Проверка целостности тормозной магистрали проходит, если ведущая единица 14 принимает ответное сообщение от каждой из отдаленных единиц 12A-12C перед тем, как время таймера истечет. Проверка целостности тормозной магистрали заканчивается неудачей, если сообщение не принято от каждой из отдаленных единиц 12A-12C, прежде чем время таймера истечет (90 секунд в одном варианте осуществления).
В качестве альтернативы применению служебного торможения для проведения проверки целостности тормозной магистрали другой сигнал давления, такой как, например, сигнал возмущения воздушного давления в тормозной магистрали, может быть применен к тормозной магистрали. Отдаленные единицы пытаются заполнить тормозную магистраль при определении сигнала возмущения и сформировать ответное сообщение в ответ на него.
Еще в одном варианте осуществления проверочный тест железнодорожного состава проводится вместо проверки целостности тормозной магистрали для проверки целостности тормозной магистрали, тогда как тест тормозной магистрали проверяет, что каждый из отдаленных локомотивов может определить уменьшение давления тормозной магистрали. Согласно проверочному тесту железнодорожного состава машинист отпускает тормоза, чтобы заполнить тормозную магистраль. Ведущая единица 14 передает сообщение отдаленным единицам 12A-12C, извещающее о том, что проверочный тест железнодорожного состава был начат. Когда отдаленная единица 12A определяет увеличение давления, она отпускает свои тормоза, заполняя тормозную магистраль, и отправляет сообщение ведущей единице 14, извещающее о том, что было определено повышение давления. Повышение давления, инициированное в отдаленной единице 12A, распространяется в заднюю часть железнодорожного состава 18. Оставшиеся отдаленные единицы 12B и 12C аналогично определяют повышение давления и уведомляют ведущую единицу 14. Благоприятно, проверочный тест железнодорожного состава подтверждает целостность тормозной магистрали без дополнительного времени на применение торможения, как требуется проверкой целостности тормозной магистрали. Неблагоприятно, что при проверочном тесте железнодорожного состава не наблюдают скорость потока в отдаленных единицах (и, следовательно, не подтверждает правильную работу датчика потока (детектора) в каждой отдаленной единице), как это происходит при проверке тормозной магистрали, а вместо этого только наблюдают повышение давления.
В то время как изобретение было описано со ссылкой на предпочтительные варианты осуществления, специалистам в области техники будет понятно, что различные изменения могут быть сделаны, а эквивалентные элементы могут быть заменены его элементами, не отступая от объема настоящего изобретения. Объем настоящего изобретения дополнительно включает в себя любую комбинацию элементов из различных вариантов осуществления, изложенных здесь. Кроме того, модификации могут быть сделаны, чтобы адаптировать конкретную ситуацию к учениям настоящего изобретения, не отступая от его основного объема. Следовательно, подразумевается, что изобретение не должно быть ограничено конкретным вариантом осуществления, раскрытым как лучший вариант для осуществления настоящего изобретения, и включает в себя все варианты осуществления, подпадающие в объем приложенной формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| БОРТОВОЙ ПОВТОРИТЕЛЬ СООБЩЕНИЙ ДЛЯ СИСТЕМЫ РАДИОСВЯЗИ ЖЕЛЕЗНОДОРОЖНОГО СОСТАВА | 2005 |
|
RU2403161C2 |
| Интеллектуальная система управления тормозами локомотива | 2016 |
|
RU2729496C1 |
| СПОСОБ ВОЖДЕНИЯ СОЕДИНЕННЫХ ПОЕЗДОВ | 2007 |
|
RU2354569C2 |
| СПОСОБ И СИСТЕМА ДЛЯ ВОЖДЕНИЯ СОСТАВОВ | 2007 |
|
RU2411147C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЗАМИ СОЕДИНЕННЫХ ПОЕЗДОВ | 2010 |
|
RU2453457C2 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2600470C1 |
| СИСТЕМА УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2008 |
|
RU2385247C1 |
| СПОСОБ И СИСТЕМА РАСПРЕДЕЛЕННОГО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ | 2014 |
|
RU2571000C2 |
| ЭКСПЛУАТАЦИЯ ПОЕЗДА С РАСПРЕДЕЛЕННЫМ ПОДВОДОМ ДВИЖУЩЕЙ СИЛЫ В ЗАВИСИМОСТИ ОТ НЕОЖИДАННОГО СОСТОЯНИЯ ПОТОКА ТЕКУЧЕЙ СРЕДЫ В ТОРМОЗНОЙ МАГИСТРАЛИ | 2007 |
|
RU2424135C2 |
| СПОСОБ И УСТРОЙСТВО УПРАВЛЕНИЯ ТОРМОЗАМИ ПОЕЗДОВ ПОВЫШЕННОГО ВЕСА И ДЛИНЫ | 2012 |
|
RU2496670C2 |
Изобретение относится к железнодорожным составам с распределенной энергией. Система связи содержит функцию обмена местами, которая выполняется посредством множества этапов способа для обмена местами функциональности ведущей единицы и отдаленной единицы в конце железнодорожного состава. Рабочие условия железнодорожного состава могут сначала быть определены для того, чтобы гарантировать, что функция обмена местами может быть выполнена. Система связи устанавливается в нейтральный режим, а тормоза и защитные блокировки применяются для защиты от движения железнодорожного состава. Каждому отдаленному локомотиву в железнодорожном составе отдается команда перейти в стадию перехода, и он реконфигурируется, чтобы принимать команды и сообщения от новой ведущей единицы. После того как машинист железнодорожного состава переместился из старой ведущей единицы в новую ведущую единицу, старая ведущая единица переходит в отдаленное состояние, а из новой ведущей единицы отдается команда окончания периода перехода. Тормоза железнодорожного состава отпускаются, а система связи устанавливается в обычный рабочий режим, в это время тяговая энергия может быть подана для движения железнодорожного состава. Техническим результатом изобретения является улучшение управления и рабочих характеристик железнодорожного состава. 3 н. и 28 з.п. ф-лы, 3 ил.
1. Способ замены состояния первого и второго локомотивов, так, что первый локомотив функционирует как отдаленная единица, а второй локомотив работает как ведущая единица в железнодорожном составе, содержащем, по меньшей мере, два разнесенных локомотива, выполненных с возможностью работы в качестве ведущего и отдаленного, причем первый локомотив работает как ведущая единица для управления работой второго локомотива, работающего в качестве отдаленной единицы, при этом первый и второй локомотивы обмениваются информацией и командами по каналу связи, управляемому системой связи, причем железнодорожный состав дополнительно содержит множество железнодорожных вагонов, а первый локомотив, второй локомотив и железнодорожные вагоны, каждый, дополнительно содержат систему пневматического торможения для торможения железнодорожного состава и имеют тормозную магистраль, проходящую по длине железнодорожного состава, при этом способ включает этапы, на которых:
определяют, являются ли приемлемыми текущие рабочие условия железнодорожного состава для замены состояния первого и второго локомотивов;
применяют тормоза в первом и втором локомотивах и железнодорожных вагонах;
приостанавливают статус ведущего первого локомотива;
конфигурируют первый локомотив для работы в качестве отдаленной единицы;
из второго локомотива отдают команду первому локомотиву изменить состояние на отдаленное, а второму локомотиву - на ведущее состояние; и проводят тест системы торможения.
2. Способ по п.1, в котором каждый локомотив дополнительно содержит рукоятку реверсивного механизма, причем способ дополнительно содержит этап, на котором вручную переводят рукоятку реверсивного механизма первого локомотива в выключенное положение.
3. Способ по п.1, в котором каждый локомотив дополнительно содержит рукоятку дросселя, причем способ дополнительно содержит этап, на котором вручную переводят рукоятку дросселя первого локомотива в нейтральное положение.
4. Способ по п.1, в котором этап применения тормозов содержит этап, на котором инициируют применение служебного торможения.
5. Способ по п.1, в котором система торможения дополнительно содержит тормозную магистраль, проходящую по длине железнодорожного состава, причем давление текучей среды в тормозной магистрали управляет торможением в железнодорожных вагонах, при этом этап применения тормозов включает этап, на котором снижают давление текучей среды, на которое железнодорожные вагоны реагируют так, чтобы применить тормоза железнодорожных вагонов.
6. Способ по п.1, в котором железнодорожный состав дополнительно содержит, по меньшей мере, один отдаленный локомотив в середине железнодорожного состава, причем этап применения тормозов дополнительно включат этап, на котором передают команду торможения из первого локомотива отдаленному локомотиву в середине железнодорожного состава, в ответ на которую применяют тормоза в отдаленном локомотиве в середине железнодорожного состава.
7. Способ по п.1, в котором первый и второй локомотивы удерживают торможение в ответ на этап применения тормозов до тех пор, пока все этапы способа не будут выполнены.
8. Способ по п.1 дополнительно включающий этап, на котором включают защитные блокировки для запрещения применения тягового усилия в первом и втором локомотивах.
9. Способ по п.1, в котором железнодорожный состав дополнительно содержит, по меньшей мере, один отдаленный локомотив в середине железнодорожного состава, причем способ дополнительно включает этап, на котором передают сообщение по линии связи от первого локомотива к отдаленному в середине железнодорожного состава, содержащее идентификацию второго локомотива.
10. Способ по п.9, дополнительно включающий этап, на котором передают ответное сообщение по линии связи от отдаленного локомотива в середине состава, причем ответное сообщение по линии связи указывает успешный прием и обработку сообщения по линии связи.
11. Способ по п.1, в котором железнодорожный состав дополнительно содержит, по меньшей мере, один отдаленный локомотив в середине состава, причем первый локомотив, второй локомотив и отдаленный локомотив в середине железнодорожного состава сохраняют возможность выдавать, по меньшей мере, одну из команды экстренного торможения и команды перегрузочного торможения в ответ на неудачное состояние железнодорожного состава, происходящее во время выполнения способа для замены состояния первого и второго локомотивов.
12. Способ по п.11, в котором возможность выдавать, по меньшей мере, одну из команды экстренного торможения и команды перегрузочного торможения содержит выдачу команды экстренного торможения через сигнал по каналу связи или через сигнал по тормозной магистрали, проходящей по длине железнодорожного состава.
13. Способ по п.1, дополнительно включающий этап, на котором перемещают машиниста первого локомотива во второй локомотив, перед этапом, на котором проводят тест системы торможения.
14. Способ по п.1 дополнительно включающий этап, на котором отдают команду системе связи перейти в обычный рабочий режим из второго локомотива.
15. Способ по п.1, в котором этап проведения теста тормозной системы дополнительно включает этап, на котором проводят, по меньшей мере, один из теста целостности тормозной магистрали и проверочного теста железнодорожного состава.
16. Способ по п.1, в котором локомотив дополнительно содержит рукоятку тормоза, имеющую ведущее положение и отдаленное положение, причем этап конфигурирования первого локомотива для работы в качестве отдаленной единицы дополнительно содержит этап, на котором позиционируют рукоятку тормоза в отдаленном положении.
17. Система связи железнодорожного состава, имеющая первый и второй разнесенные локомотивы, каждый из которых выполнен с возможностью работы в качестве ведущего и отдаленного, причем первый локомотив работает как ведущая единица для управления работой второго локомотива, работающего как отдаленная единица, при этом железнодорожный состав дополнительно содержит железнодорожные вагоны, причем первый локомотив, второй локомотив и железнодорожные вагоны, каждый, дополнительно содержат систему торможения для торможения железнодорожного состава, имеющего тормозную магистраль, проходящую по длине железнодорожного состава и управляемую контроллером тормозов, расположенным в первом и втором локомотивах, причем система связи содержит:
канал связи;
станцию в первом локомотиве для выдачи первой команды по каналу связи второму локомотиву, в ответ на которую первый локомотив применяет тормоза и входит в приостановленное рабочее состояние, во время которого ведущая работа первого локомотива приостановлена; и
станцию во втором локомотиве для выдачи второй команды по каналу связи первому локомотиву для управления первым локомотивом в качестве отдаленного, а вторым локомотивом в качестве ведущего, и для завершения приостановленного рабочего состояния.
18. Система по п.17, в которой первая команда содержит команду для выполнения служебного торможения.
19. Система по п.17, в которой первая команда содержит команду для запрета применения тягового усилия во втором локомотиве.
20. Система по п.17, в которой первая команда содержит сообщение по линии связи, идентифицирующее второй локомотив.
21. Система по п.20, в которой станция в первом локомотиве отвечает на сообщение по линии связи с помощью ответного сообщения по линии связи, указывающего успешный прием и выполнение сообщения по линии связи.
22. Система по п.17, в которой вторая команда возвращает систему связи к обычной работе.
23. Система по п.17 дополнительно содержит третью команду, выданную вторым локомотивом, содержащую команду для выполнения проверки системы торможения.
24. Система по п.23, в которой тест системы торможения дополнительно содержит один из теста целостности тормозной магистрали и проверочного теста железнодорожного состава.
25. Система связи железнодорожного состава, имеющего первый и второй разнесенные локомотивы, каждый из которых выполнен с возможностью работы в качестве ведущего и в качестве отдаленного, причем первый локомотив работает как ведущая единица для управления работой второго локомотива, работающего как отдаленная единица, при этом система связи содержит:
канал связи;
первую станцию в первом локомотиве, отвечающую на входной сигнал машиниста железнодорожного состава для выполнения функции замены локомотива, дополнительно содержащую передачу сигналов по каналу связи второму локомотиву; и
вторую станцию во втором локомотиве для выполнения функции обмена местами локомотивов посредством передачи сигналов первому локомотиву по каналу связи, причем после выполнения функции обмена местами первый локомотив работает как отдаленная единица, а второй локомотив работает как ведущая единица.
26. Система по п.25, в которой сигналы, переданные первой станцией, содержат команду применения торможения, в ответ на которую второй локомотив применяет тормоза и входит в приостановленное рабочее состояние, во время которого ведущая работа первого локомотива приостановлена.
27. Система по п.25, в которой сигналы, переданные первой станцией, содержат сигнал, запрещающий применение тягового усилия во втором локомотиве.
28. Система по п.25, в которой железнодорожный состав дополнительно содержит локомотив в середине железнодорожного состава, расположенный между первым и вторым локомотивами и работающий в качестве отдаленной единицы, причем сигналы, переданные первой станцией, передаются второму локомотиву и локомотиву в середине железнодорожного состава, при этом сигналы, переданные второй станцией, передаются первому локомотиву и локомотиву в середине железнодорожного состава.
29. Система по п.28, в которой сигналы, переданные первой станцией, содержат сообщение по линии связи, идентифицирующее второй локомотив.
30. Система по п.29, в которой станция в локомотиве в середине железнодорожного состава передает ответное сообщение по линии связи первому локомотиву.
31. Система по п.25, в которой сигналы, переданные второй станцией, содержат сообщение для инициализации обычной работы системы связи с первым локомотивом, работающим как отдаленная единица, и вторым локомотивом, работающим как ведущая единица.
| US 5317751 А, 31.05.1994 | |||
| US 5289176 А, 22.02.1994 | |||
| US 5481456 А, 02.01.1996 | |||
| US 5570284 А, 29.10.1996 | |||
| СИСТЕМА АВТОМАТИЗИРОВАННОГО ВОЖДЕНИЯ ГРУЗОВЫХ ПОЕЗДОВ ПОВЫШЕННОЙ МАССЫ И ДЛИНЫ С РАСПРЕДЕЛЕННЫМИ ПО ИХ ДЛИНЕ ЛОКОМОТИВАМИ | 2003 |
|
RU2238860C1 |

