Изобретение относится к области приборостроения и может быть использовано при создании инерциальных навигационных систем для определения навигационных параметров управляемых подвижных объектов.
Наиболее близким к данному изобретению является «Способ коррекции инерциальной навигационной системы» RU 2658571, 2018, базирующийся на следующих основных положениях:
Эффективность коррекции (сокращение шулеровского периода колебаний платформы и сокращение постоянной затухания шулеровских колебаний) зависит от соотношения погрешности в определении скорости движения объекта с помощью инерциальной системы в сравнении с погрешностью инерциальной системы.
Устройство комплексирования корректирующих сигналов должно вырабатывать корректирующий инерциальную систему сигнал заведомо более точней чем сигнал инерциальной системы из сигналов неинерциальных корректирующих систем, автоматически оценивая возможность использования и меру участия каждого сигнала в формировании корректирующего сигнала. Логический вывод такого сигнала починяется нечетким правилам алгоритма Мамдани, позволяя на базе нечетких чисел получить четкие значения сигнала, обеспечивающего эффективность коррекции.
Алгоритм комплексирования сигналов коррекции должен быть построен таким образом, чтобы выбывали из рассмотрения сигналы навигационных систем, искажающих измеряемые параметры, что обеспечивается отключением сигналов навигационных систем от программы комплексирования, если сигнал несущий разность линейных скоростей, измеренных инерциальной и корректирующей системами, не попадает в "основании" треугольника функции принадлежности.
Комплексирование предполагает совместную обработку сигналов различных систем. В рассматриваемом случае предполагается комплексирование сигналов неинерциальных систем для получения сигнала, который можно использовать для коррекции инерциальной системы, изменяющей динамику работы инерциальной системы, в результате чего инерциальная система становится более точной. Сигнал инерциальной системы не используется при совместной обработке сигналов всех систем для их комплексирования, но он используется для получения разностей между сигналом инерциальной системы и сигналами участвующих в комплексировании систем.
Недостатком способа - аналога является то, что во внешней коррекции инерциальной курсовертикали (ИКВ) не учитывается компенсация погрешностей в счислении ϕ и λ, вызванных нестабильностью параметров чувствительных элементов инерциальной навигационной системы:
- нестабильность смещения нуля акселерометров,
- нестабильность масштабного коэффициента акселерометров,
- нестабильность дрейфа гироскопов.
Задачей предлагаемого изобретения является внесение в алгоритм коррекции инерциальной навигационной системы сигналов, компенсирующих погрешности чувствительных элементов, которые позволят существенно снизить погрешности в счислении географических координат.
Технический результат достигается тем, что в блок бортового вычислителя, материализующий модель погрешностей ИКВ вместе с сигналами, характеризующими нестабильности параметров чувствительных элементов ИНС из блока системы калибровки подается сигнал в блок определения погрешностей ϕ и λ, выходной сигнал которого подается в блок коррекции навигационной системы ИКВ.
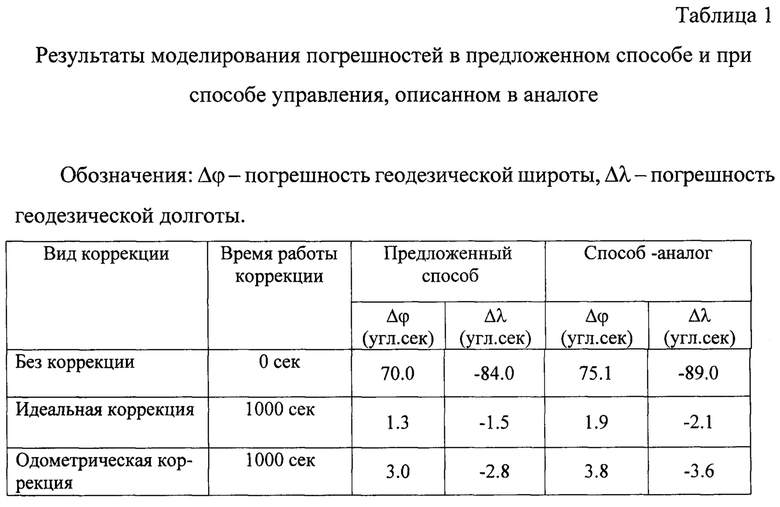
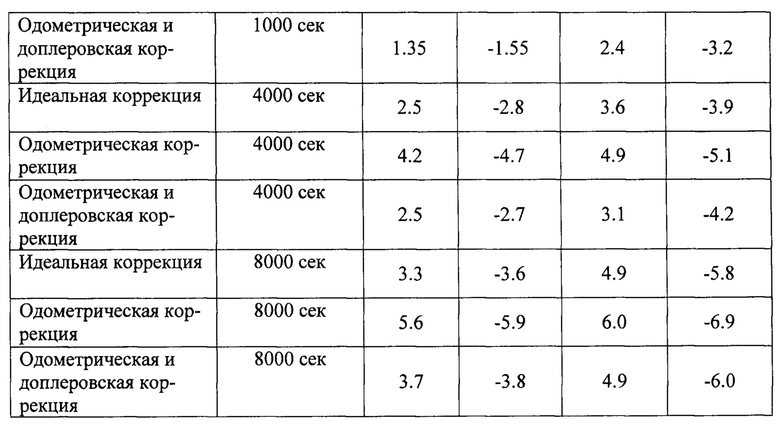
Сущность изобретения поясняется приведенным ниже описанием, фигурой 1 и подтверждается примером моделирования предложенного способа компенсации погрешностей в таблице 1.
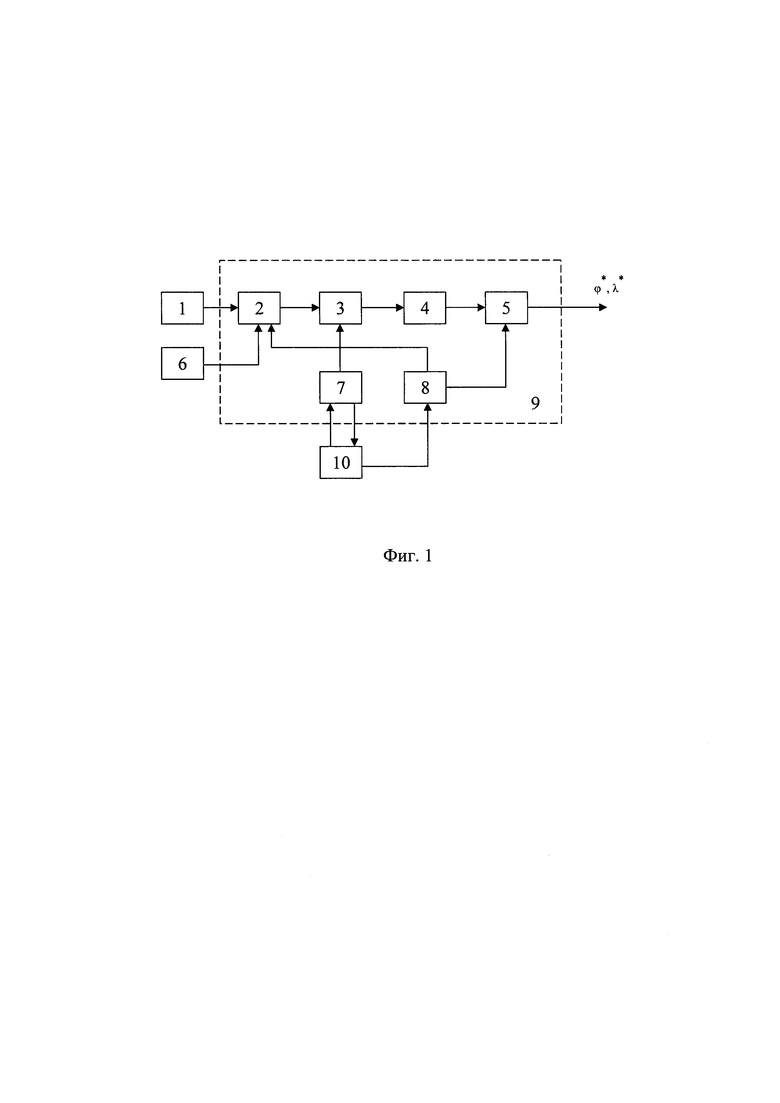
В состав корректируемой ИКВ (фигура 1) входят:
1. Одометрическая навигационная система («внешний корректор»);
2. Блок комплексирования сигналов внешних для ИКВ корректоров 1 и 6;
3. Модель погрешностей ИКВ в определении счисления линейной скорости объекта;
4. Определение сигнала коррекции ϕ и λ;
5. Определение скорректированного сигнала ИНС;
6. Доплеровская навигационная система («внешний корректор»);
7. Система калибровки ИКВ для определения нестабильности дрейфа гироскопов, смещения нуля и масштабного коэффициента акселерометров;
8. Инерциальная навигационная система, счисляющая ϕ и λ;
9. Бортовой цифровой вычислитель, обеспечивающий работу всех алгоритмов;
10. ИКВ на базе трехосного гиростабилизатора с акселерометрами на гироплатформе.
Блоком системы комплексирования сигналов внешней коррекции определяются разности ΔVi в показании линейной скорости объекта, полученные от инерциальной системы и навигационных систем Vi:
ΔVi=V-Vi=δV-δVi,
δV и δVi - погрешности инерциальной и навигационных систем.
Значения ΔVi<0 выводятся из дальнейшего рассмотрения (обнуляются).
Определяется положение для каждой разности скоростей путем определения текущего значения математического ожидания разности скоростей M(ΔVi).
Определяется текущее значение меры истинности каждой разности с помощью текущего состояния функции принадлежности.
Производится поточечное суммирование (агрегирование) текущих состояний функций принадлежности.
Определяется центр тяжести полученной кривой от суммирования функций принадлежности и соответствующее ему четкое значение комплексированного значения разности ΔVк.
Параметры функций принадлежности определяются с помощью экспертных оценок точностных характеристик навигационных систем путем статического анализа телеметрических данных.
Полученное значение комплексированного сигнала подается на ИКВ для коррекции амплитуды и периода шулеровских колебаний гироплатформы.
Системой калибровки ИКВ определяются нестабильности дрейфа гироскопов, смещение нуля и масштабные коэффициенты акселерометров, полученные значения подаются на инерциальную навигационную систему, счисляющую географические координаты подвижного объекта.
Сигнал от инерциальной навигационной системы корректируется с учетом определенного сигнала коррекции ϕ и λ.
Результаты сравнительного моделирования погрешностей навигационной системы подвижного объекта с применением разработанного способа компенсации случайных составляющих чувствительных элементов и способа коррекции инерциальной навигационной системы, описанного в способе-аналоге, представлены в таблице 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2017 |
|
RU2658571C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СПОСОБ КОРРЕКЦИИ ДАТЧИКА ПРОЙДЕННОЙ ДИСТАНЦИИ | 2003 |
|
RU2243505C1 |
| Способ коррекции гировертикали по углу атаки | 2022 |
|
RU2790548C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОДЕЛИ ПОГРЕШНОСТЕЙ ИЗМЕРЕНИЙ АКСЕЛЕРОМЕТРОВ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИИ | 2012 |
|
RU2504734C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
Способ определения навигационных параметров подвижного объекта с компенсацией случайных составляющих чувствительных элементов корректируемой инерциальной курсовертикали, может быть использован при создании инерциальных навигационных систем для определения навигационных параметров управляемых подвижных объектов. Сущность способа заключается в том, что помимо сигналов интегральной и внешней коррекции инерциальной курсовертикали в составе инерциальной навигационной системы формируется сигнал коррекции, компенсирующий погрешность в счислении ϕ и λ, от нестабильности параметров чувствительных элементов инерциальной курсовертикали. Сигнал разности линейной скорости объекта, полученный в инерциальной навигационной системе, и линейной скорости, полученной путем комплексирования внешних для инерциальной навигационной системы навигационных систем, подается в блок бортового вычислителя, материализующий модель погрешностей инерциальной курсовертикали вместе с сигналами, характеризующими нестабильность параметров чувствительных элементов. Техническим результатом изобретения является повышение надежности системы коррекции, уменьшение погрешности в счислении географических координат подвижного объекта за счет компенсации параметров нестабильности чувствительных элементов инерциальной курсовертикали. 1 ил., 1 табл.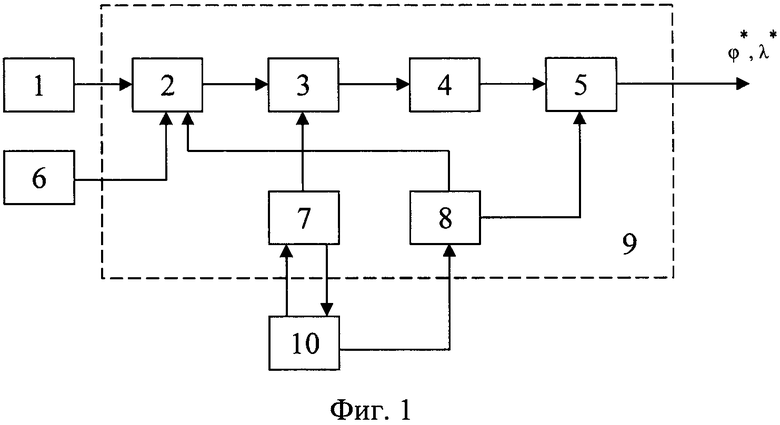
Способ определения навигационных параметров подвижного объекта с компенсацией случайных составляющих чувствительных элементов корректируемой инерциальной курсовертикали, заключающийся в том, что инерциальная навигационная система (ИНС) корректируется внешней навигационной системой путем воздействия предварительно комплексированными корректирующими сигналами на гироскопы гироблоков горизонтальных каналов ИНС с помощью датчиков момента, установленных на осях прецессии гироблоков ИНС, отличающийся тем, что помимо сигналов интегральной и внешней коррекции инерциальной курсовертикали (ИКВ) в составе ИНС формируют сигнал коррекции, компенсирующий погрешность в счислении ϕ и λ от нестабильности параметров чувствительных элементов (ЧЭ) ИКВ, для чего сигнал разности линейной скорости объекта, полученный в ИНС, и линейной скорости, полученной путем комплексирования внешних для ИНС навигационных систем (ОНС и ДНС), подают в блок бортового вычислителя, материализующий модель погрешностей ИКВ вместе с сигналами, характеризующими нестабильность параметров ЧЭ ИНС из блока системы калибровки ИНС, выходной сигнал блока материализующего погрешности ИКВ подают в блок определения погрешностей ϕ и λ из-за нестабильности параметров ЧЭ ИНС, выходной сигнал которого подается в блок коррекции навигационной системы ИКВ для компенсации влияния ЧЭ ИНС.
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЕЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА ЭТАПЕ НАЧАЛЬНОЙ ВЫСТАВКИ | 2005 |
|
RU2300081C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ УПРАВЛЯЕМЫХ ПОДВИЖНЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2241959C1 |
| СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2017 |
|
RU2658571C1 |
| AU 2014314608 B2, 04.10.2018. | |||

