Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является уменьшение требований к вычислительной мощности бортовой ЭВМ резервной гировертикали путем создания способа непрерывной коррекции по расчетному углу атаки ЛА.
В бесплатформенной гировертикали углы крена и тангажа вычисляются по информации от датчиков угловых скоростей.
Основным недостатком бесплатформенных систем является накопление ошибок, поэтому большое внимание уделяется точности используемых гироскопов. Данный недостаток устраняется путем коррекции ориентации по показаниям акселерометров, которые обеспечивают устранение накопления погрешности. При этом гироскопы снижают влияние динамики ЛА на точность. Такой способ коррекции называется маятниковым. Привлекательность маятниковой коррекции заключается в простоте, а также в исключении необходимости учитывать форму Земли, ее угловую скорость и местоположение ЛА. Недостатком является трудность выделения гравитационных составляющих из ускорений, измеряемых акселерометрами в полете.
Известен Способ коррекции бесплатформенной инерциальной навигационной системы, описанный в патенте RU 2564380, МПК G01C 21/06, опубликован 27.09.2015 г., бюллетень №27, принятый нами за прототип.
В известном способе на основании сигналов, поступающих с акселерометров, входящих в состав ИНС, определяют модуль абсолютного ускорения, действующего на объект, на котором установлена ИНС, используют сигналы, соответствующие угловой скорости объекта и оценивают сигнал, соответствующий земной скорости, осуществляют комплексирование данных сигналов и преобразованных сигналов, соответствующих линейным ускорениям с учетом параметров полета объекта, а адаптивную оценку крена и тангажа производят посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модулей перегрузки и линейной скорости, а также угловых скоростей.
Недостаток известного способа заключается в том, что при маневрировании ЛА этот способ обладает недостаточной точностью. Это может привести к возникновению значительных погрешностей в результате постоянного маневрирования высокоманевренных ЛА. Для рекуррентного оценивания углов крена и тангажа при помощи фильтра Калмана требуется достаточно мощный резервный бортовой вычислитель.
Целью заявляемого изобретения является обеспечение летательного аппарата углами крена и тангажа в резервном режиме с требуемой точностью и уменьшение требований к мощности резервного бортового вычислителя.
Поставленная цель достигается за счет того, что в способе коррекции гировертикали по углу атаки, при котором на основании сигналов, поступающих с датчиков угловых скоростей и соответствующих угловым скоростям объекта, а также сигналов текущих значений крена и тангажа, осуществляют комплексирование и преобразование этих сигналов, дополнительно используют сигналы, равные величине расчетного угла атаки, которую определяют косвенным методом вычисления по уравнениям динамики полета, включающим нормальную перегрузку, а также параметры полета, поступающие от системы воздушных сигналов (СВС) - параметры скоростного напора, горизонтальную и вертикальную воздушные скорости, площадь крыла и вес ЛА, коэффициент подъемной силы, - при этом углы крена и тангажа определяют через расчетный угол атаки, используя угловые скорости с учетом назначаемого порога интенсивности вращения, в соответствии с которым постоянная времени интеграторов переключается с малого на большое значение при превышении порога интенсивности вращения.
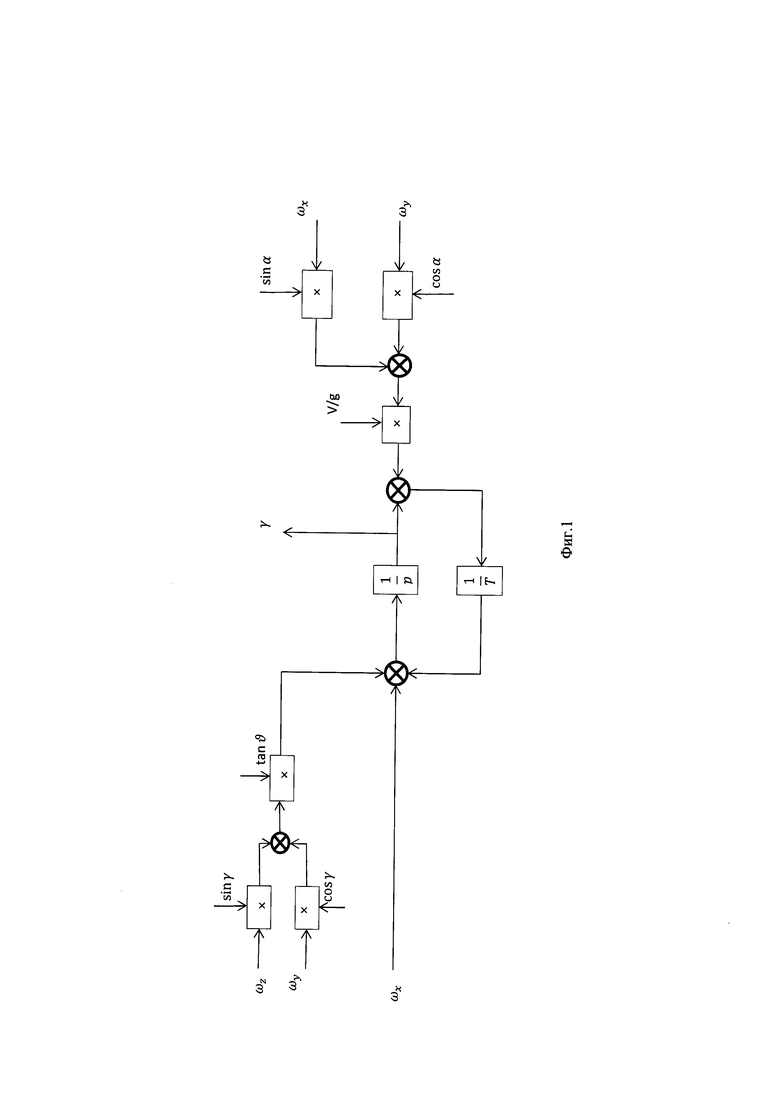
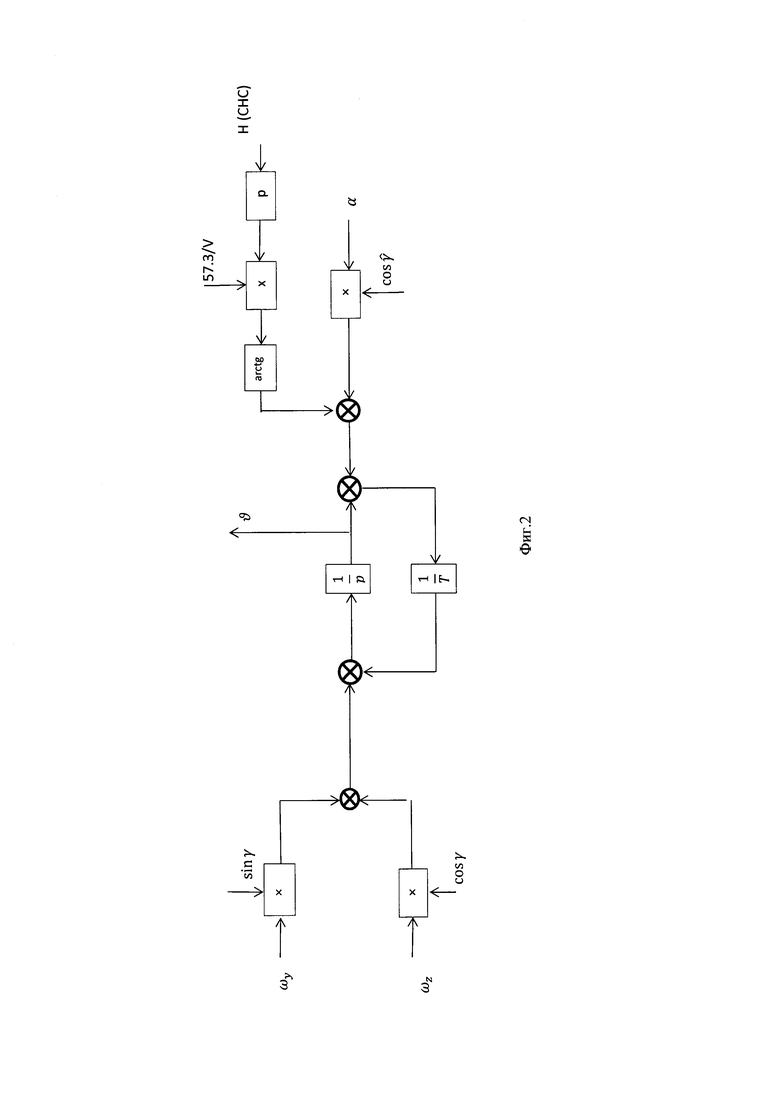
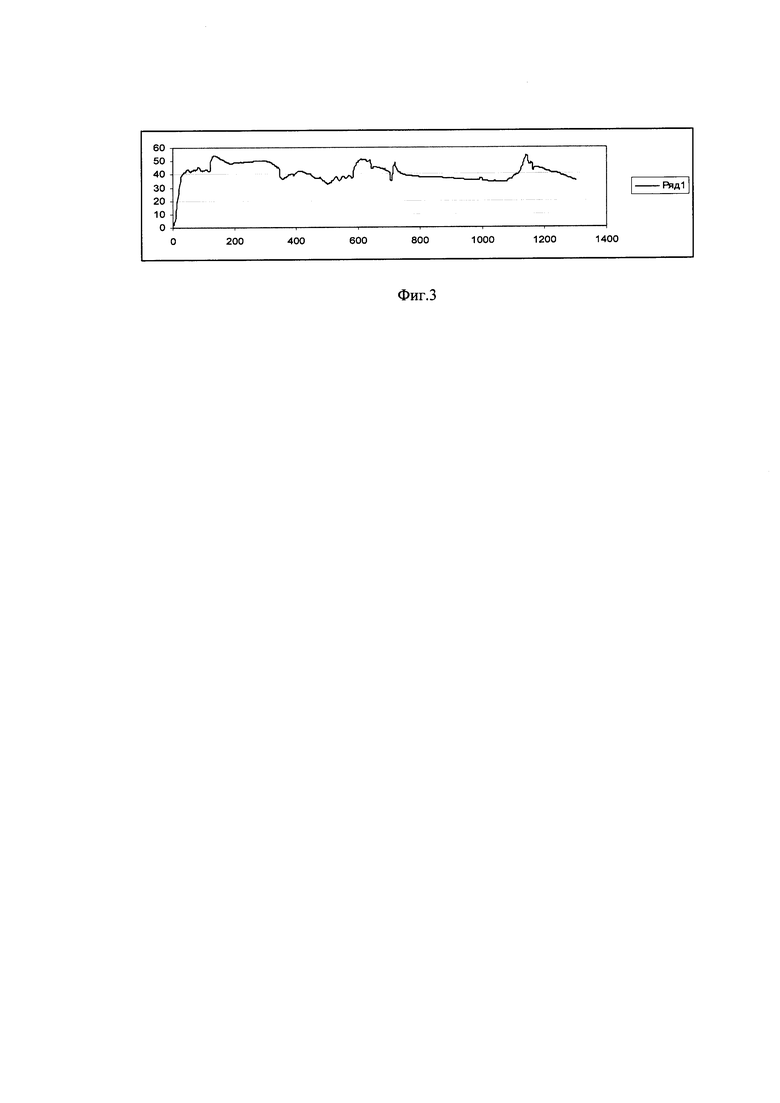
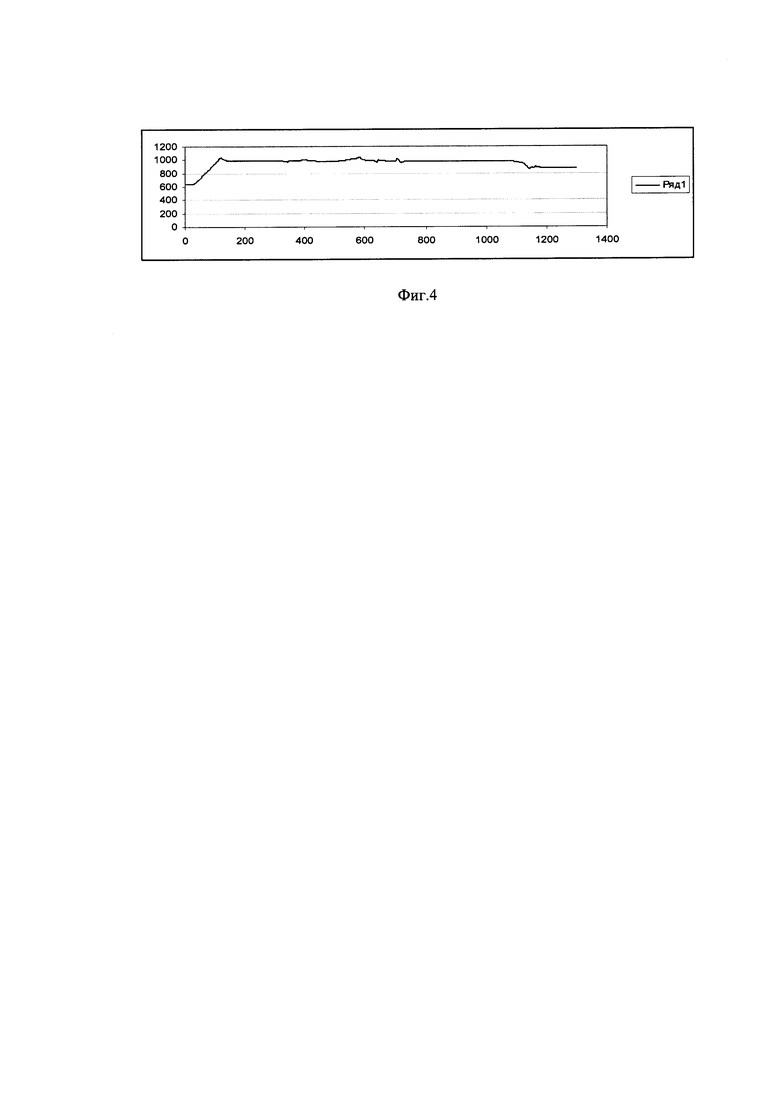
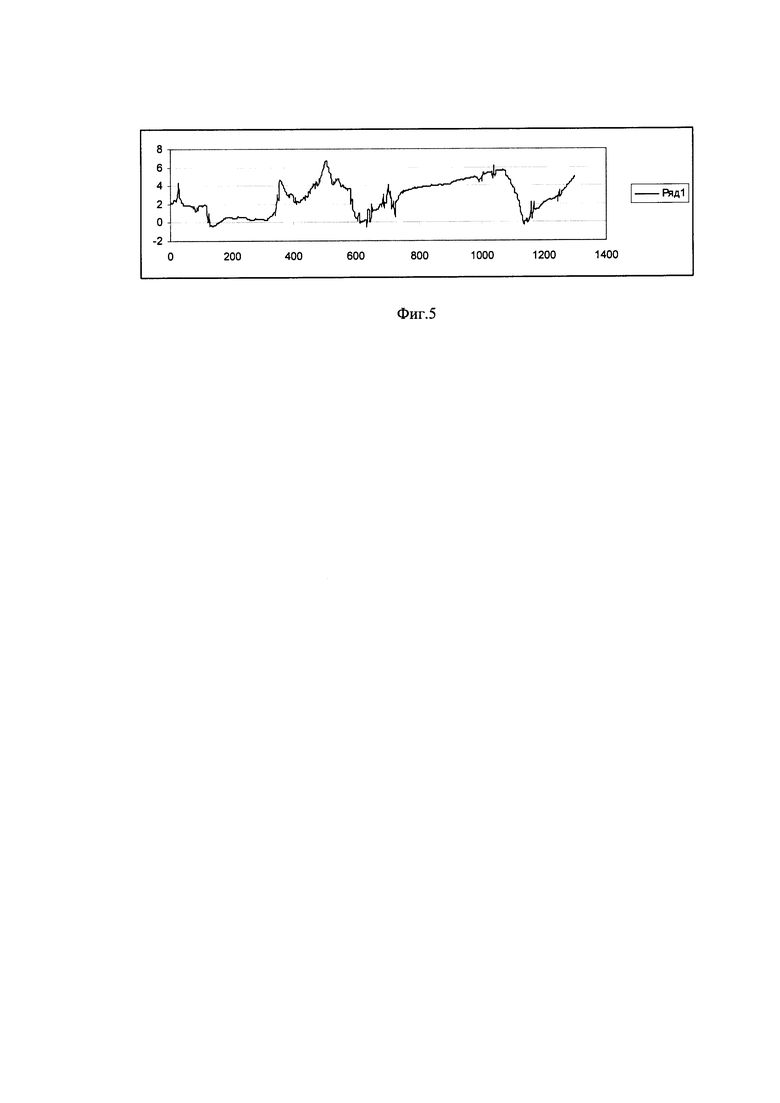
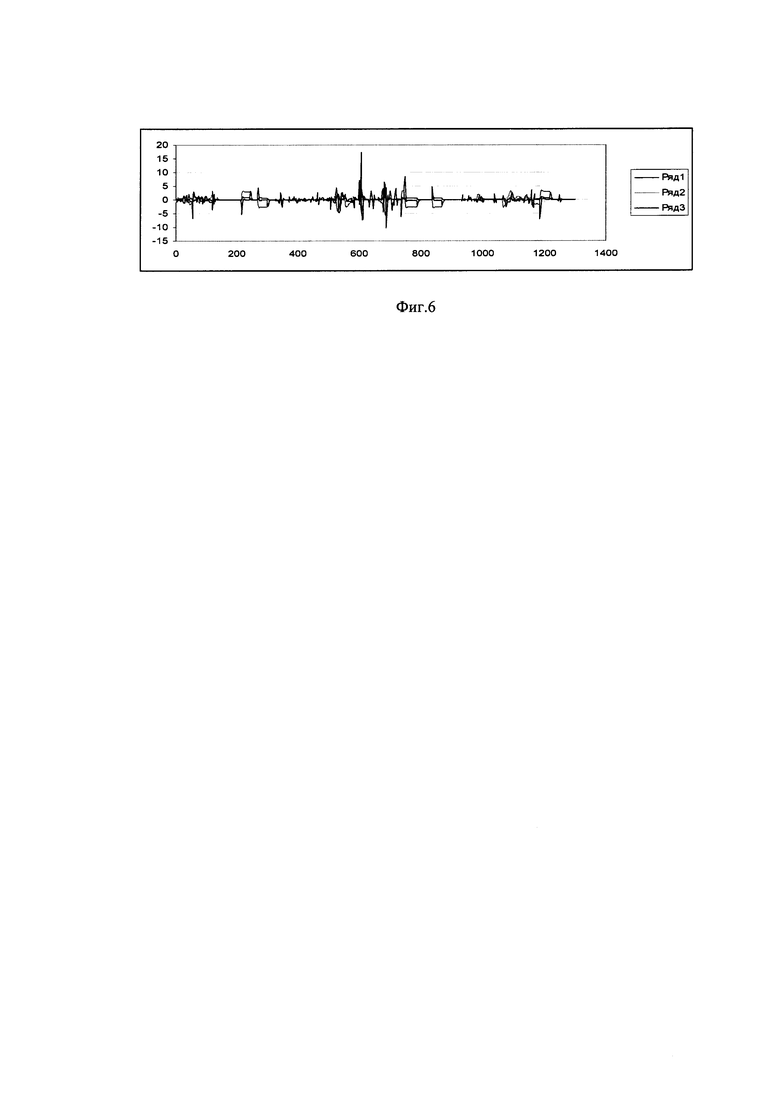
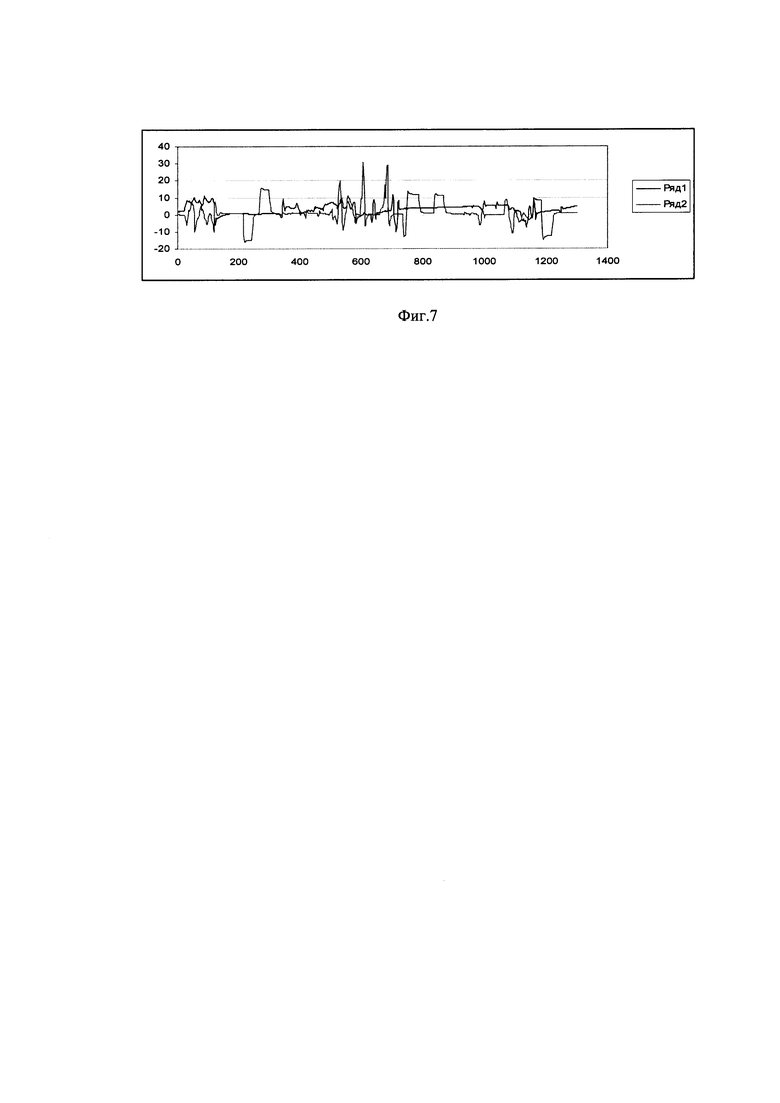
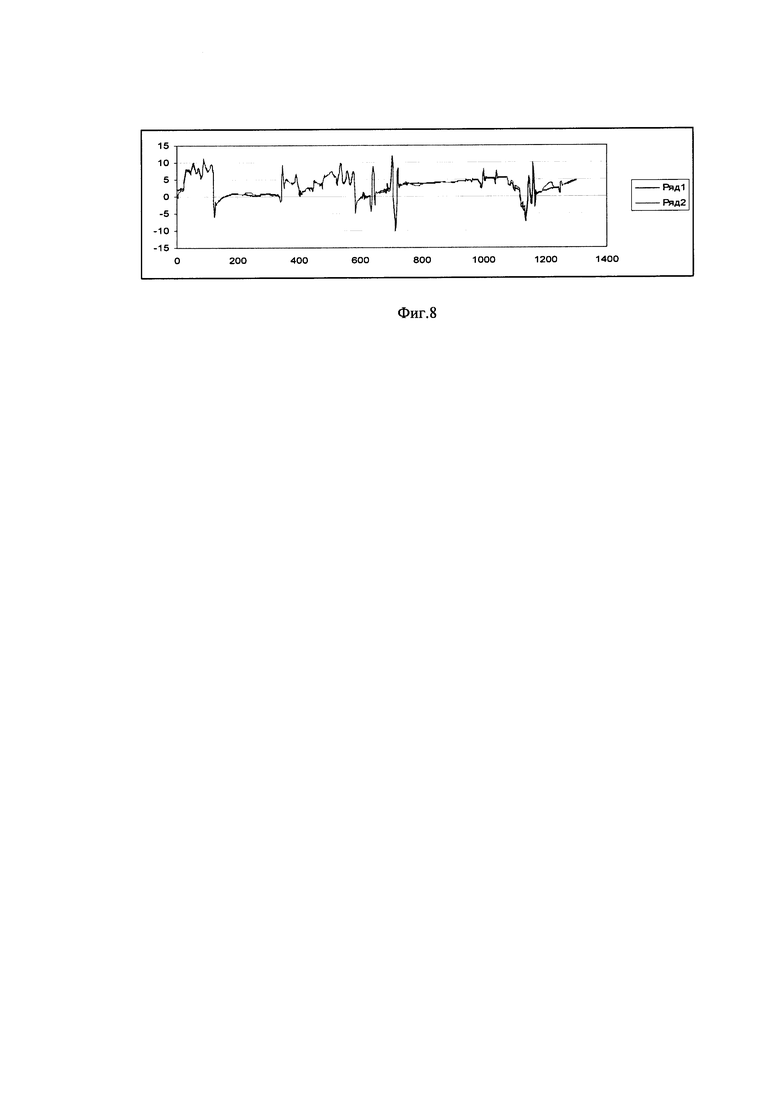
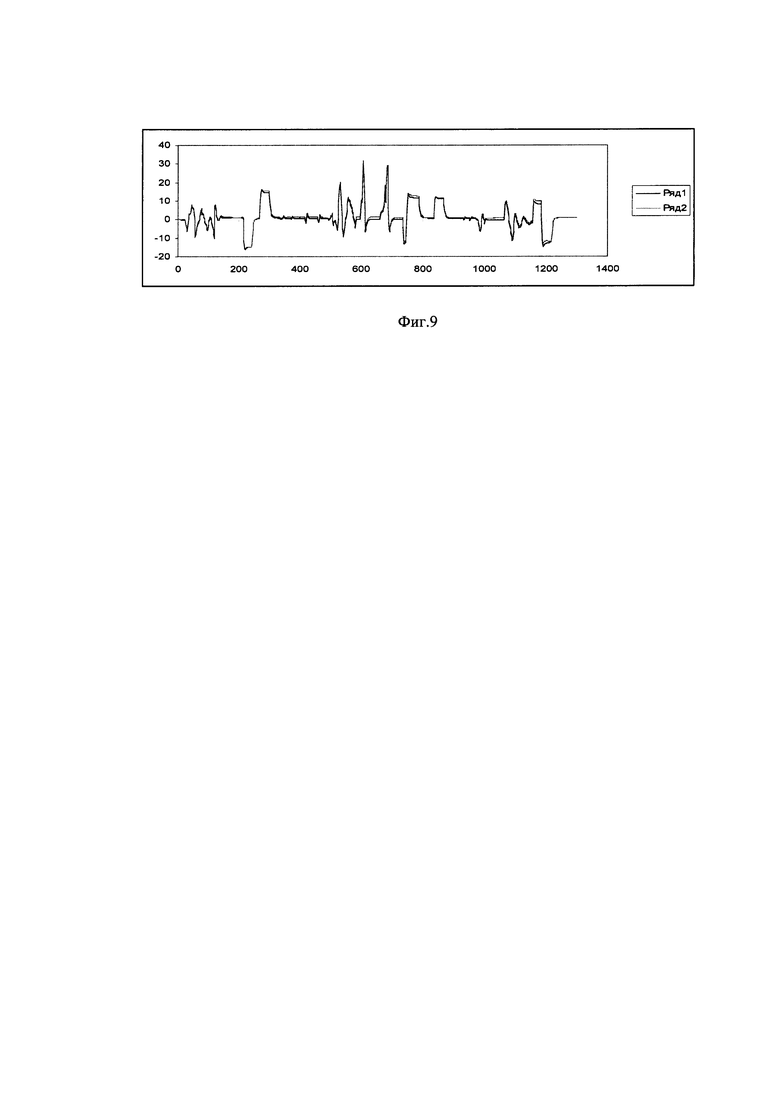
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема коррекции по каналу крена, на фиг. 2 представлена структурная схема коррекции по каналу тангажа. Для анализа точности работы схем использовались процессы движения легкого самолета, полученные с помощью имитации полета на авиасимуляторе (фиг. 3 -9). На фиг. 3 показана путевая скорость; на фиг. 4 - абсолютная высота; на фиг.5 - угол атаки; на фиг. 6: 1 - угловая скорость wx, 2 - угловая скорость wy, 3 - угловая скорость wz; на фиг. 7: 1 - тангаж, 2 - крен; на фиг. 8: 1 - тангаж, 2 - оценка при комплексировании схем инерциальной курсовертикали (ИКВ) и СВС: на фиг. 9: 1 - крен, 2 - оценка при комплексировании схем ИКВ и СВС.
Суть работы способа излагается ниже.
Используют известные динамические уравнения Эйлера для определения углов крена и тангажа (схема ИКВ):


где ωz и ωх угловые скорости по связанным осям ЛА, γ и ϑ текущие значения углов крена и тангажа.
Эти углы можно использовать для управления ЛА либо непосредственно, либо после корректировки по углу атаки. Угол атаки получают от СВС, в которой он определяется по известным соотношениям из уравнений динамики ЛА в соответствии с формулами
Суа=Ya/(q S);
Ya=nya ⋅ mg,
где Cya- коэффициент подъемной силы,
Ya - подъемная сила.
Используя соотношение Cya=f(α), можно получить угол атаки (α). Здесь Cya - текущий коэффициент подъемной силы, α- угол атаки.
Необходимо записать эту функцию в память бортового вычислителя. Данная функция известна из результатов аэродинамических продувок для конкретного ЛА. В противном случае ее вычисляют по конструктивным параметрам ЛА. Имея характеристику α=f1-(Cya), можно вычислить угол атаки.
Для определения углов крена и тангажа через воздушную скорость и угол атаки воспользуемся известными выражениями из динамики полета самолета (схема СВС):


Схема СВС для определения углов крена и тангажа может использоваться как самостоятельно, так и при комплексировании со схемой ИКВ. Для анализа точности работы схем как по отдельности, так и при их комплексировании использовались процессы движения легкого самолета, полученные с помощью моделирования и имитации полета на авиасимуляторе (фиг. 3-9). Все представленные процессы согласованы между собой и соответствуют полету самолета по некоторому заданному маршруту.
При моделировании ошибки измерения датчиков имитировались как постоянные и случайные.
Постоянная времени Т в схемах ИКВ принималась равной 15 с. Полученные с помощью имитации полета на авиасимуляторе параметры приведены на фиг. 3-7.
Комплексирование схем ИКВ и СВС.
Рассматривался способ комплексирования, при котором результирующие оценки принимались средними взвешенными оценок схем ИКВ и СВС.
 при |ϑikv-ϑcvc|<pϑ,
при |ϑikv-ϑcvc|<pϑ,
 при |ϑikv-ϑcvc|ϑ≥pϑ,
при |ϑikv-ϑcvc|ϑ≥pϑ,
aikv1+acvc1=1, aikv2+acvc2=1,
 при |γikv-γcvc|<рγ,
при |γikv-γcvc|<рγ,
 при |γikv-γcvc|≥pγ,
при |γikv-γcvc|≥pγ,
bikv1+bcvc1=1 bikv2+bcvc2=1
Здесь: aikv1, aikv2, acvc1, acvc2, bikv1, bikv2, bcvc1, bcvc2 - весовые коэффициенты, pϑ, pγ - пороговые значения модулей рассогласований между оценками схем ИКВ и СВС.
Пороги и весовые коэффициенты назначают так, чтобы больше доверять схеме СВС и корректировать ее показания при слишком больших выбросах оценок, превышающих динамические ошибки схемы ИКВ.
Осуществляют изменение постоянной времени Т апериодических звеньев, играющих роль приближенных интеграторов уравнений Эйлера, в зависимости от интенсивности вращения ЛА. Индикатором интенсивности вращения принят модуль угловой скорости ЛА, пропущенный через фильтр низкой частоты (ФНЧ) второго порядка, который обозначим |ω|f. Постоянная времени ФНЧ 0.5 с.
Назначают порог интенсивности вращения Por|ω|f. Постоянная времени интеграторов переключается с малого на большое значение при превышении порога интенсивности вращения:
T=Tmin при f|ω|f < Por|ω|f,
Т=Tmax при |ω|f ≥ Por|ω|f,
Tmin=30, Tmax=500
На фиг. 8, 9 представлены оценки тангажа и крена при комплексировании схем ИКВ и СВС.
Схемы СВС и ИКВ обеспечивают приемлемую точность оценивания крена и тангажа при выполнении следующих условий:
- достаточно точное измерение угла атаки;
- малое влияние ветра на разность между воздушной и путевой скоростями. Оценки углов при тангаже 90 градусов не поддерживаются.
По данным моделирования на авиасимуляторе и при указанных погрешностях датчиков комплексирование схем ИКВ со схемами СВС обеспечивает СКО погрешностей до уровня 0.8 градуса при этом смещение оценок крена и тангажа имеет порядок 0.5 градуса.
Техническим результатом использования изобретения является уменьшение требований к вычислительной мощности ЭВМ резервной гировертикали и получение значений углов, удовлетворяющих требованиям точности к резервной системе определения углов крена и тангажа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ автономной коррекции гировертикали | 2022 |
|
RU2801623C2 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ДАТЧИКОВ УГЛОВОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2241247C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| Комплексный способ навигации летательных аппаратов | 2016 |
|
RU2646957C1 |
| Малогабаритный навигационный комплекс | 2016 |
|
RU2644632C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
| УНИФИЦИРОВАННЫЙ НАВИГАЦИОННЫЙ КОМПЛЕКС ЛА | 2015 |
|
RU2590934C1 |
Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Способ коррекции гировертикали по углу атаки заключается в том, что на основании сигналов, поступающих с датчиков угловых скоростей и соответствующих угловым скоростям объекта, а также сигналов текущих значений крена и тангажа осуществляют комплексирование и преобразование этих сигналов, дополнительно используют сигналы, равные величине расчетного угла атаки, которую определяют косвенным методом вычисления по уравнениям динамики полета, включающим нормальную перегрузку, а также параметры полета, поступающие от системы воздушных сигналов. При этом параметры полета включают в себя параметры скоростного напора, горизонтальную и вертикальную воздушные скорости, площадь крыла и вес ЛА, коэффициент подъемной силы. А углы крена и тангажа определяют через расчетный угол атаки, используя угловые скорости с учетом назначаемого порога интенсивности вращения, в соответствии с которым постоянная времени интеграторов переключается с малого на большое значение при превышении порога интенсивности вращения. Технический результат – обеспечение ЛА углами крена и тангажа в резервном режиме с требуемой точностью и уменьшение требований к мощности резервного бортового вычислителя. 9 ил.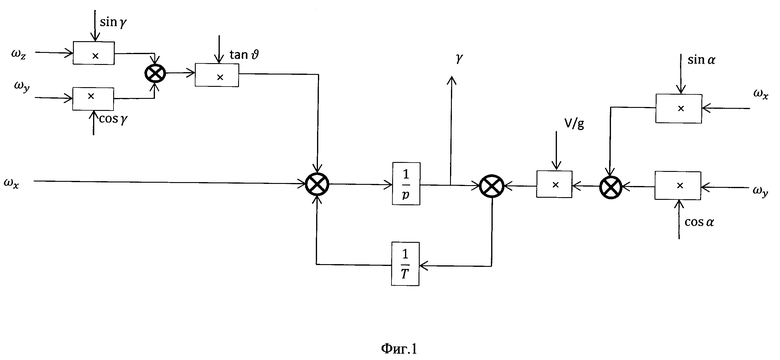
Способ коррекции гировертикали по углу атаки, при котором на основании сигналов, поступающих с датчиков угловых скоростей и соответствующих угловым скоростям объекта, а также сигналов текущих значений крена и тангажа осуществляют комплексирование и преобразование этих сигналов, дополнительно используют сигналы, равные величине расчетного угла атаки, которую определяют косвенным методом вычисления по уравнениям динамики полета, включающим нормальную перегрузку, а также параметры полета, поступающие от системы воздушных сигналов (СВС), - параметры скоростного напора, горизонтальную и вертикальную воздушные скорости, площадь крыла и вес ЛА, коэффициент подъемной силы, при этом углы крена и тангажа определяют через расчетный угол атаки, используя угловые скорости с учетом назначаемого порога интенсивности вращения, в соответствии с которым постоянная времени интеграторов переключается с малого на большое значение при превышении порога интенсивности вращения.
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ГОРИЗОНТАЛЬНОЙ ОРИЕНТАЦИИ АППАРАТА | 2007 |
|
RU2373562C2 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ И УСТРОЙСТВО КОНТРОЛЯ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2012 |
|
RU2502050C1 |
| US 7430460 B2, 30.09.2008. | |||

