Изобретение относится к измерительной технике и может быть использовано для морских, воздушных и наземных объектов. Задачей изобретения является повышение точности бесплатформенной инерциальной навигационной системы (БИНС) путем создания способа непрерывной коррекции курсовертикали.
Классическим алгоритмом вычисления углов ориентации является пересчет показаний ДУС в угловые скорости 


Проблема коррекции курсовертикали БИНС заключается в том, что при маневрировании ЛА моменты времени, когда статические оценки крена и тангажа обладают достаточной точностью, могут возникать недопустимо редко. В связи с этим предлагается способ адаптивной коррекции углов крена и тангажа, в котором коррекция выполняется непрерывно.
Известен способ коррекции инерциальной навигационной системы (ИНС), описанный в патенте RU 2345326 С1, МПК G01C 21/06, опубл. 27.01.2009, автора Прохорцова А.В., принятый нами за прототип.
Сущность способа заключается в следующем. По показаниям акселерометров, входящих в состав ИНС, определяют абсолютное ускорение, действующее на объект, на котором установлена ИНС, по формуле:
 ,
,
где gx - показания акселерометра, измеряющего ускорение по продольной оси объекта, на котором установлена ИНС; gy - показания акселерометра, измеряющего ускорение по вертикальной оси;
gz - показания акселерометра, измеряющего ускорение по поперечной оси объекта, на котором установлена ИНС.
В момент времени, когда абсолютное ускорение равно ускорению силы тяжести 
Недостаток известного способа заключается в том, что при маневрировании ЛА моменты времени, когда оценки крена и тангажа обладают достаточной точностью, могут возникать недопустимо редко. Это может привести к возникновению значительных погрешностей в результате действия постоянных или медленно меняющихся ускорений во всем диапазоне полета.
Целью заявляемого изобретения является обеспечение непрерывной коррекции БИНС по углам крена и тангажа с требуемой точностью, в том числе и при маневрировании летательного аппарата.
Поставленная цель достигается за счет того, что в способе коррекции бесплатформенной инерциальной навигационной системы, при котором на основании сигналов, поступающих с акселерометров, входящих в состав инерциальной навигационной системы (ИНС), определяют модуль абсолютного ускорения, действующего на объект, на котором установлена ИНС, и в момент времени, когда абсолютное ускорение равно ускорению силы тяжести для местности, где находится ИНС, в установившимся режиме полета определяют углы тангажа и крена объекта, для непрерывной коррекции углов тангажа и крена дополнительно используют сигналы, соответствующие угловой скорости объекта и сигнал, соответствующий земной скорости объекта, причем комплексирование данных сигналов и сигналов, соответствующих линейным ускорениям, преобразованных с учетом параметров полета объекта, и адаптивную оценку углов крена и тангажа осуществляют посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модуля перегрузки, угловых скоростей и земной скорости объекта.
Благодаря предлагаемому способу коррекции БИНС происходит подавление влияния кажущегося ускорения, достаточное для обеспечения необходимой точности оценивания крена и тангажа. В результате зависимость маятниковой коррекции от вида движения ЛА ослабляется до уровня, позволяющего использовать датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа.
Суть работы способа излагается ниже.
По измерениям датчиков ДУС и ДЛУ оценивается вектор состояния:

Здесь ϑ - угол тангажа; γ - угол крена; V - модуль вектора скорости летательного аппарата относительно земли; i - номер дискретного момента времени измерений датчиков; 


Изменения крена и тангажа во времени описываются уравнениями Эйлера. За счет постоянной коррекции накопление ошибок, обусловленных влиянием конических вибраций конструкции аппарата, устраняется. При этом отпадает необходимость применения многошаговых алгоритмов ориентации и достаточно использовать простой одношаговый алгоритм следующего вида

 .
.
Дискретная динамическая модель объекта наблюдения имеет вид.



Адаптивный фильтр Калмана строится относительно вектора состояния (1). Вектор наблюдений, обозначаемый далее Z, содержит измерения акселерометров.

Здесь vi - вектор ошибок измерений с заданной постоянной ковариационной матрицей R.
Функции fx, fy, fz определяют связь измерений перегрузок с параметрами полета. Точные соотношения для этих функций имеют вид.

Здесь Vx, Vy, Vz - проекции вектора земной скорости на связанные оси ЛА.
Полный учет соотношений (5) при ограничении состава датчиков только акселерометрами и гироскопами не представляется возможным, поэтому принимается упрощающее допущение о малости углов атаки и скольжения, а также допущение о постоянстве модуля путевой скорости на интервале дискретизации Δt.
При этом имеют место соотношения: 


С учетом (6) матрица Якоби вектора наблюдений (5) имеет вид.

Соотношения (6) являются приближенными. Степень приближения зависит от отклонения модуля перегрузки от единицы. Чем больше модуль перегрузки отличается от единицы, тем менее точны эти уравнения и тем больше дисперсии 



где 
Текущий вектор состояния (1) рассчитывается по уравнениям Эйлера (2), после чего полагается, что он известен с точностью до погрешностей датчиков. При этом уравнения объекта принимаются в виде:

Здесь xiq - вектор, в котором компоненты крена и тангажа рассчитаны по соотношениям (3), а компонента скорости принимается равной ее априорному значению на момент текущих измерений;
wi - вектор возмущений с ковариационной матрицей Qi:

Вектор возмущений qϑ, qγ задается с учетом точности ДУС, qV - учитывает изменение скорости.
В соответствии с (9) переходная матрица дискретной модели объекта, используемая в алгоритме фильтра Калмана для прогноза ковариационной матрицы ошибок оценивания, принимается единичной.
Адаптивный алгоритм фильтра Калмана имеет следующий вид:

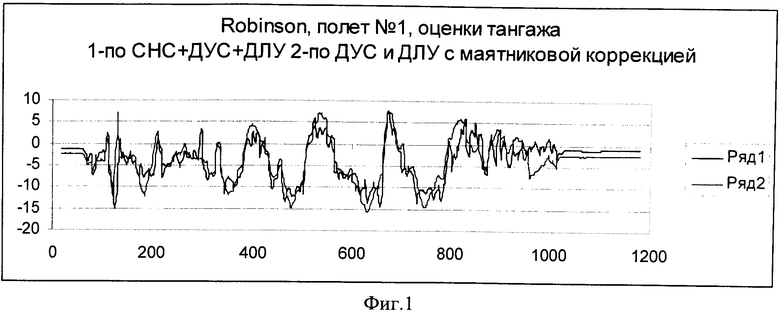
Способ коррекции БИНС проверялся при помощи обработки полетных данных вертолета Robinson (фиг. 1 и 2).
В модельных задачах для процессов движения требовалось:
1 - обеспечение устойчивости процессов оценки ориентации, заключающейся в отсутствии накопления ошибок при смещениях нулей гироскопов порядка до 200 град/час.
2 - хороший уровень ошибок оценивания относительно модельных значений крена и тангажа на переходных процессах.
В задачах обработки полетных данных вертолета требовалось соблюдение близости оценок крена и тангажа к оценкам, полученным иным способом, а именно - с помощью алгоритма ориентации при комплексировании информации от ДУС и ДЛУ с измерениями проекций земной скорости, поступающими от приемника спутниковой навигационной системы (СНС). Также проверялось соответствие получаемых оценок показаниям контрольного прибора.
В то время, когда положение ЛА является близким к установившемуся, имеет место идеальный случай маятниковой коррекции. При этом оценки крена и тангажа, определяемые по фильтру Калмана, заменяются оценками, вычисляемыми непосредственно по показаниям акселерометров.

Для снижения влияния вибрационных шумов измерений сигналы датчиков предварительно пропускаются через сглаживающие фильтры второго порядка с постоянной времени 0.1 с и декрементом затухания 1.
Таким образом, с помощью приведенных соотношений решается задача оценивания вектора (1) по наблюдениям (4) с учетом одношагового алгоритма ориентации (2). Получаемые при этом оценки вектора (1) на каждом шаге подставлялись в уравнения Эйлера (2).
Расчеты показывают, что способ сохраняет работоспособность при изменении углов тангажа и крена в пределах абсолютных значений до 70-80 градусов.
На основе результатов обработки полетных данных вертолета:
1. Вычислялась ориентация ЛА по алгоритму комплексирования измерений приемника СНС с датчиками ДУС и ДДУ на скользящем интервале наблюдений.
2. Вычислялись углы крена и тангажа по способу адаптивной коррекции БИНС. Полученные данные подтвердили, что заявляемое изобретение обеспечивает повышение точности и непрерывности коррекции углов тангажа и крена курсовертикали БИНС в условиях маневрирования в полете.
Предложенный способ коррекции БИНС позволяет использовать датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа, так как из-за непрерывной коррекции ошибки не накапливаются.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2635820C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Способ коррекции бесплатформенной инерциальной навигационной системы | 2016 |
|
RU2646954C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Способ автономной коррекции гировертикали | 2022 |
|
RU2801623C2 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2643201C2 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| СПОСОБ ОБРАБОТКИ ИНФОРМАЦИИ О ПЕРЕМЕЩЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2436047C1 |

Изобретение относится к измерительной технике и предназначено для непрерывной коррекции углов крена и тангажа подвижных объектов, в частности беспилотных летательных аппаратов. Изобретение предусматривает использование сигналов, соответствующих угловой скорости объекта, и сигнала, соответствующего земной скорости объекта, и комплексирование данных сигналов и сигналов, соответствующих линейным ускорениям, преобразованных с учетом параметров полета объекта, и адаптивную оценку крена и тангажа осуществляют посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модули перегрузки, угловых скоростей и земной скорости объекта. В процессе работы интенсивность коррекции адаптируется к отклонениям кажущейся вертикали от гравитационной. При этом происходит подавление влияния кажущегося ускорения, достаточное для обеспечения необходимой точности оценивания крена и тангажа. За счет этого зависимость маятниковой коррекции от вида движения объекта ослабляется до уровня, позволяющего использовать датчики ДУС и ДЛУ средней и низкой точности, в том числе микромеханического типа. Технический результат - повышение точности навигации подвижных объектов. 2 ил.
Способ коррекции бесплатформенной инерциальной навигационной системы, при котором на основании сигналов, поступающих с акселерометров, входящих в состав инерциальной навигационной системы (ИНС), определяют модуль абсолютного ускорения, действующего на объект, на котором установлена ИНС, и в момент, когда абсолютное ускорение равно ускорению силы тяжести для местности, где находится ИНС, в установившемся режиме полета определяют углы тангажа и крена объекта, отличающийся тем, что для непрерывной коррекции углов тангажа и крена дополнительно используют сигналы, соответствующие угловой скорости объекта, и сигнал, соответствующий земной скорости объекта, причем комплексирование данных сигналов и сигналов, соответствующих линейным ускорениям, преобразованных с учетом параметров полета объекта, и адаптивную оценку углов крена и тангажа осуществляют посредством фильтра Калмана, в котором коэффициент усиления изменяется в зависимости от текущих значений модуля перегрузки, угловых скоростей и земной скорости объекта.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАВИГАЦИОННЫХ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМОЙ | 2007 |
|
RU2348903C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2005 |
|
RU2293950C1 |

