Изобретение относится к области приборостроения, преимущественно гироскопического, и может быть использовано при создании платформенных инерциальных навигационных систем.
Известен способ определения параметров ориентации (угла гироскопического курса ψг, угла тангажа ϑг, угла крена γк) подвижного объекта с помощью инерциальной курсовертикали (ИКВ) (см., например, книгу Ю.А. Акиндеева, В.Г. Воробъева, А.А. Карчевского "Аппаратура измерения курса и вертикали на воздушных судах гражданской авиации"). ИКВ построена на основе трехосного гиростабилизатора с дополнительной рамой, в которой используется интегральный принцип коррекции положения стабилизированной площадки в плоскости горизонта с формированием абсолютной линейной скорости объекта по осям некорректируемой ("свободной") в азимуте стабилизируемой площадки. На стабилизированной площадке установлены два свободных трехстепенных гироскопа, оси чувствительности которых образуют правый координатный трехгранник O1X1Y1Z1. Ось координат O1Y1 ориентируется при настройке курсовертикали по направлению ускорения силы тяжести, при этом оси O1X1 и O1Z1 находятся в плоскости, перпендикулярной вектору ускорения силы тяжести, а точка O1 начала координат трехгранника считается совпадающей с центром тяжести объекта. На стабилизированной площадке установлены также три акселерометра, оси чувствительности которых направлены соответственно параллельно осям О1Х1, O1Y1 O1Z1, измеряющих составляющие кажущегося ускорения ax1, ay1, az1 соответственно. Гироскоп с вертикальным расположением вектора кинетического момента обеспечивает стабилизацию площадки по осям крена и тангажа. Гироскоп с горизонтальным расположением вектора кинетического момента обеспечивает стабилизацию площадки в азимуте. Составляющая ay1 выдается потребителям для счисления вертикальной составляющей скорости объекта. Проекции по осям стабилизированной площадки абсолютной линейной скорости объекта Vx1 и Vz1 определяются путем интегрирования составляющих абсолютного ускорения движения объекта ax1 и az1 по горизонтальным осям стабилизированной площадки:


где Vx1(0), Vz1(0) - начальные значения составляющих абсолютной линейной скорости.
Для осуществления интегральной коррекции стабилизированной площадки к соответствующему гироскопу прикладываются моменты, пропорциональные составляющим Ux1 и Uz1 абсолютной угловой скорости движения объекта соответственно. Составляющие Ux1 и Uz1 получаются преобразованием с помощью масштабных множителей величин Vx1 и Vz1, имеющихся на выходе интеграторов:


где Ro - радиус Земли.
ИКВ имеет режимы "Настройка" и "Работа". В режиме "Настройка" происходит выставка курсовертикали, которая автоматически выполняется в два этапа: ускоренная выставка стабилизированной площадки в плоскость горизонта и в азимуте; точная выставки стабилизированной площадки в плоскость горизонта и в азимуте. В режиме ускоренная выставка выполняется выставка гиростабилизированной площадки в плоскость горизонта по сигналам с датчиков акселерометров и в азимуте - по корпусу моноблока. Режим точной выставки предусмотрен для точной выставки стабилизированной площадки в плоскость горизонта и в плоскость азимута, а также для запоминания постоянных составляющих скорости дрейфа стабилизированной площадки по каждой из ее осей. В этом режиме включается гироскопическая стабилизация площадки, которая работает следующим образом. Сигналы с датчиков вертикального гироскопа, усиленные предварительными усилителями, установленными на стабилизируемой площадке, поступают на преобразователь координат, а с него на входы усилителей стабилизации. С выхода усилителей сигналы поступают на двигатели стабилизации тангажа и крена. По каналу курса сигнал с датчика курсового гироскопа, усиленный предварительным усилителем, поступает на вход усилителя стабилизации, а с его выхода на двигатель стабилизации. Стабилизация канала внешней рамы крена осуществляется по сигналу с синусной обмотки синусно-косинусного трансформатора внутренней рамы крена, поступающему на вход усилителя внешней рамы, а с его выхода - на двигатель внешней рамы. Точная установка стабилизированной площадки в плоскость горизонта выполняется по сигналам акселерометров каналов тангажа и крена. После усиления усилителями акселерометров эти сигналы поступают на входы интеграторов, которые в режиме точной выставки работают как усилители коррекции и далее на вход усилителей датчиков моментов гироскопа с вертикальным вектором кинетического момента. Сигналы, пропорциональные углам наклона акселерометров, поступают на вход усилителей датчиков моментов гироскопа в сумме с сигналом с выхода регулировочных потенциометров, подключенных к стабилизированному напряжению. Сигналы с выходов усилителей датчиков моментов гироскопа поступают на датчики моментов гироскопа с вертикальным вектором кинетического момента, которые заставляют прецессировать площадку с акселерометрами вокруг соответствующих осей к плоскости горизонта. По окончанию переходного процесса сигнал на выходах усилителей акселерометров близок к нулевому, измерительные оси акселерометров находятся в плоскости горизонта, а на выходах интеграторов формируется сигнал, пропорциональный составляющей угловой скорости вращения Земли и постоянным составляющим скоростей дрейфов стабилизированной площадки вокруг соответствующих осей, а датчики момента развивают моменты для точного удержания стабилизированной площадки с акселерометрами в плоскости горизонта. Внешняя рама крена в режиме точной выставки работает в режиме слежения за внутренней рамой крена. В канале курса на вход усилителя коррекции поступает сигнал с синусной обмотки курсового синусно-косинусного трансформатора, а с выхода усилителя коррекции на вход усилителя датчика момента курсового гироскопа и на вход блока запоминающего устройства для запоминания изменения постоянной составляющей скорости дрейфа стабилизированной площадки по курсу. На вход усилителя датчика момента курсового гироскопа поступает сумма сигналов: сигнал с выхода усилителя коррекции, сигнал пропорциональный вертикальной составляющей вращения Земли, сигнал с выхода регулировочного потенциометра. Сигнал с выхода усилителя датчика момента курсового гироскопа поступает на соответствующий датчик момента этого гироскопа, и датчик момента развивает момент для точного удержания оси стабилизированной площадки относительно продольной оси моноблока. Таким образом в режиме точной выставки постоянная составляющая скорости дрейфа стабилизированной площадки по курсу выделяется, а затем запоминается в блоке запоминающего устройства относительно неподвижного корпуса моноблока инерциальной курсовертикали. В рабочем режиме следящая система коррекции по курсу отключается, стабилизированная площадка становится свободной в азимуте, осуществляется ее интегральная коррекция в плоскости горизонта, с выхода блока запоминающего устройства на вход усилителя датчика момента курсового гироскопа поступает напряжение для компенсации изменения скорости дрейфа по курсу от запуска к запуску. В рабочем режиме на синусно-косинусные трансформаторы каналов тангажа, крена, курса подаются питающие напряжения и с них снимаются сигналы, соответствующие: углу тангажа - углу поворота внешней рамы крена относительно рамы тангажа; углу крена - углу поворота объекта относительно внешней рамы крена; углу гироскопического курса - углу поворота внутренней рамы крена относительно стабилизированной площадки Для рассматриваемой ИКВ гироскопическим курсом является угол между горизонтальной осью стабилизированной площадки, направленной в режиме "Настройка" в сторону продольной оси объекта, угловое положение которой относительно корпуса моноблока в этом режиме характеризуется нулевым сигналом с синусно-косинусного трансформатора курсового канала и проекцией продольной оси объекта на горизонтальную плоскость стабилизированной площадки. В рассмотренном способе определения параметров ориентации с применением инерциальной курсовертикали не определяется угол истинного курса, который является важным параметром в географической ориентации объекта. Отсутствие этого параметра в инерциальной курсовертикали обусловлено отсутствием в режиме "Настройка" привязки к плоскости меридиана осей стабилизированной площадки. Режим этой привязки реализован в более информативных инерциальных навигационных системах.
За прототип взят способ определения параметров ориентации объекта, включая угол истинного курса, с помощью инерциальной навигационной системы (см. книгу "Самолетные навигационные системы" (сборник материалов) под редакцией В.Ю. Поляка. - М., 1973. - С 246-295). В этом способе параметры ориентации объекта в инерциальной навигационной системе (ИНС) определяют с помощью гироплатформы, в состав которой входят группа гиростабилизированных акселерометров, гироскопов и кардановые рамы подвески гироскопов и акселерометров. С помощью гироплатформы обеспечивают акселерометрам независимость от угловых перемещений объекта и удерживают их оси чувствительности в фиксированных направлениях относительно Земли, причем обычно две из входных осей акселерометров располагают в плоскости местного горизонта. С помощью кардановых рам подвески гироскопов и акселерометров формируют стабилизированную площадку, которая сохраняет свое положение в пространстве независимо от колебаний объекта. Углы поворота рам измеряют с помощью синусно-косинусных трансформаторов и выходные сигналы с них подают на указатели параметров ориентации объекта-курса, тангажа и крена. Сигналы с акселерометров подают в специализированную вычислительную машину инерциальной навигационной системы, которая по выходным данным двух горизонтальных акселерометров рассчитывает северную и восточную составляющие путевой скорости, широту и долготу местоположения, скорости изменения широты и долготы объекта. В ИНС реализуют два режима - "Выставка" и "Навигация". Режим "Выставка" проводят для определения начальных условий, необходимых для определения параметров ориентации и для решения уравнений ИНС. Находят следующие начальные условия: две координаты исходного места; три координаты ориентировки гироплатформы; три величины скорости изменения ориентировки гироплатформы. Применяют различные методы выставки ИНС: горизонтирование и гирокомпасирование с использованием установленных на платформе акселерометров, гироскопов; выставка с передачей информации от опорной (ведущей) платформы, которую устанавливаю с внешней стороны объекта, ИНС которого должна юстироваться, и убирают по окончании выставки; переносные платформы выставляют в подготовленном помещении ко времени начала работы объекта, переносят на борт объекта и используют в качестве опорной (ведущей) платформы; выставка "по памяти" при которой "вспоминают" значения углов рам карданового подвеса, записанные во время предыдущей выставки; оптическая выставка платформы. Выставку способом "горизонтирования и гирокомпасирования" выполняют следующим образом. Горизонтирование выполняют вращением стабилизированной площадки вокруг двух горизонтальных осей до тех пор, пока отсчеты на выходах акселерометров не станут нулевыми, эту операцию выполняют обычно в два этапа. При приближенном горизонтировании кардановые рамы поворачивают до приведения к нулю чувствительных элементов кардановых рам (синусно-косинусных трансформаторов) или акселерометров. При точном горизонтировании заставляют прецессировать гироскопы по сигналам установленных на платформе акселерометров. При этом с помощью сигналов, снимаемых с гироскопов, поворачивают рамы карданового подвеса до тех пор, пока акселерометры не будут находится в горизонтальной плоскости. При выставке в азимуте поворачивают стабилизированную площадку до тех пор, пока она не установится в заданном опорном направлении, которым может быть истинный север или ортодромический путевой угол. В ИНС с географической ориентацией осей гироплатформы азимут стабилизированной площадки оставляют совмещенным с направлением на север, а начальный азимут в ИНС со свободной в азимуте гироплатформой рассчитывают. Выставку в азимуте при гирокомпасировании выполняют в следующей последовательности. Сначала производят приближенное горизонтирование и приближенную выставку в азимуте. Затем выполняют точное горизонтирование и производят точное гирокомпасирование, в течение которого продолжают точное горизонтирование. После этого ИНС переключают в режим "Навигация". Выставку в азимуте гирокомпасированием начинают с приближенной выставки поворотом сервопривода рамы внутреннего крена стабилизированной площадки по магнитному компасу с учетом расчетной величины магнитного склонения и заданного угла установки платформы относительно истинного севера. Приближенной выставкой по азимуту уменьшают общее время на выставку, поскольку скорость вращения сервопривода рамы внутреннего крена выше скорости прецессии гироскопа. Выставку гирокомпасированием выполняют основываясь на том принципе, что если платформа горизонтальна, то она поворачивается относительно Земли с величиной скорости равной величине скорости вращения Земли и должна равняться ΩCosϕCosψ и ΩCosϕSinψ, где Ω-угловая скорость вращения Земли, ϕ-широта местоположения объекта с ИНС, ψ-азимут гироплатформы. Используя сигнал с выхода северного акселерометра для управления восточным гироскопом и его скорость прецессии используют для того, чтобы прецессировал азимутальный гироскоп. Систему приводят в равновесие, когда ΩCosϕSinψ станет равным нулю. Когда ψ=0 в нуль обращаются азимут и восточная скорость прецессии, а северный акселерометр будет горизонтален и направлен на север. Когда гирокомпасирование успешно закончено, о чем свидетельствует постоянный низкий выходной сигнал северного акселерометра, систему переключают в режим "Навигация". В этом режиме углы тангажа и крена считывают непосредственно с кардановых осей. При использовании гироплатформы с дополнительной следящей рамой (ДР) угол тангажа ϑг определяют как угол поворота дополнительной рамы относительно рамы тангажа (РТ), угол крена γг измеряют как угол поворота объекта относительно ДР. Угол рыскания ψг определяют как угол поворота рамы внутреннего крена (РВК) относительно стабилизированной площадки (СП), а угол курса как К=-ψг в ИНС с географической ориентацией ее осей.
В известном способе выработки параметров ориентации объекта, включающих углы курса, тангажа и крена, производится непосредственным считыванием сигналов с синусно-косинусных трансформаторов, расположенных на осях гироплатформы. Определение параметров ориентации таким образом происходит с погрешностями, обусловленных уходом стабилизированной площадки гироплатформы в горизонте и по азимуту. Рассмотрим влияние в известном способе скоростей дрейфа СП на погрешности выработки ИНС углов ориентации объекта. На фиг. 1 показана кинематическая схема гироплатфомы инерциальной навигационной системы на динамически настраиваемых гироскопах (ДНГ). Гироплатформа с четырехосным кардановым подвесом имеет: ось OA подвеса стабилизированной площадки, ось ОВ подвеса рамы внутреннего крена, ось ОС подвеса рамы тангажа, ось ОД подвеса дополнительной рамы. Гироплатформа содержит: стабилизированную площадку 1, расположенную в кардановом подвесе, раму внутреннего крена 2, раму тангажа 3, дополнительную раму наружного крена 4. На СП расположены ДНГ курсового канала 5, ДНГ каналов крена и тангажа 6, акселерометры 7 и 8 с горизонтальными осями чувствительности, акселерометр 9 с вертикальной осью чувствительности. По оси OA стабилизированной площадки установлены датчик 10 угла поворота ψг РВК относительно СП, преобразователь координат 11 и разгрузочный датчик момента 12 системы стабилизации. По оси ОВ рамы внутреннего крена установлены: датчик угла 13 поворота ϕг РТ относительно РВК и разгрузочный датчик момента 14. По оси ОС рамы тангажа установлены датчик угла 15 поворота ϑг ДР относительно РТ и разгрузочный датчик момента 16. По оси ОД дополнительной рамы расположены датчик угла 17 поворота на угол уг объекта относительно ДР, датчик момента 18 следящей системы канала ДР. В состав ДНГ 5, 6 входят соответственно датчики угла 19, 20 и 26, 27, датчики моментов 21, 22 и 28, 29, ротора 23 и 30, внутренние кардановые подвесы 24 и 31 с кардановыми рамками и упругими торсионами, валы 24 и 32 двигателей ДНГ. Система стабилизации СП имеет усилители стабилизации курсового канала 12 и каналов тангажа и крена соответственно 34 и 35, усилитель 36 электрической пружины ДНГ и усилитель 37 канала следящей системы ДР. При рассмотрении используем следующие системы координат (СК): OиXиYиZи - инерциальная СК, в которой начало координат помещено в центр Земли, ось OиYи направлена по оси вращения Земли на северный полюс, оси ОиХи и OиZи образуют плоскость OиXиZи земного экватора, ось ОиХи направлена на точку весеннего равноденствия (такая СК с высокой точность неподвижно ориентирована относительно бесконечно удаленных звезд); OнXнYнZн - навигационная СК жестко связана с Землей, ось ОнХн направлена по оси вращения Земли на северный полюс, оси OнYн и OнZн образуют плоскость OнYнZн земного экватора, а оси ОнХн и OнYн - плоскость Гринвичского меридиана; ОдХдYдZд - сопровождающая географическая СК Дарбу: ось ОдХд направлена на север, ось ОдYд - вертикально вверх, а ось OдZд - на восток; OcXcYcZc - СК связана с объектом, начало СК помещено в центр масс объекта, оси ОсХс и OcYc расположены в вертикальной плоскости симметрии объекта, при этом ось ОсХс направлена вдоль оси корпуса объекта, а ось OcYc - по перпендикуляру к оси ОсХс, лежащему в вертикальной плоскости симметрии объекта, ось OcZc перпендикулярна плоскости симметрии объекта и образует правую СК; СК O1X1Y1Z1 - связана со СП, ее начало помещено в центр пересечения осей OA, ОВ, ОС, OD гироплатформы, ось O1X1 направлена по оси РВК ОВ в направлении продольной оси объекта, ось O1Y1 направлена по оси платформы OA вверх, ось O1Z1 направлена так, чтобы СК была правой; СК O2X2Y2Z2 связана с РВК, начало СК помещено в центр пересечения осей OA, ОВ, ОС, OD гироплатформы, ось О2Х2 направлена по оси РВК ОВ, ось O2Y2 направлена по оси вращения СП, ось O2Z2 направлена так, чтобы СК была правой; СК O3X3Y3Z3 связана с РТ. Начало СК помещено в центр пересечения осей гироплатформы OA, ОВ, ОС, OD, ось О3Х3 направлена по оси ОВ РВК в направлении продольной оси объекта, ось O3Z3 направлена по оси ОС рамы тангажа в сторону правого борта объекта, ось O3Y3 направлена так, чтобы СК была правой; СК O4X4Y4Z4 связана с ДР, начало СК помещено в центр пересечения осей гироплатформы OA, ОВ, ОС, OD, ось О4Х4 направлена по оси OD дополнительной рамы в направлении продольной оси объекта, ось O4Z4 направлена по оси ОС рамы тангажа в сторону правого борта объекта, ось О4Х4 направлена по оси ОД дополнительной рамы в направлении продольной оси объекта, ось O4Z4 направлена по оси ОС рамы тангажа в сторону правого борта объекта, ось O4Y4 направлена так, чтобы СК была правой. Введем следующие обозначения при рассмотрении углов: ϕ, λ - соответственно углы географической широты и долготы, характеризующие положение сопровождающей СК Дарбу OдXдYдZд относительно навигационной СК OнXнYнZн; ψ, ϑ, γ - соответственно углы рыскания, тангажа, крена, характеризующие положение СК OcXcYcZc, связанной с объектом, относительно системы координат Дарбу OдXдYдZд; μ, β, α - углы Эйлера-Крыловы, характеризующие положение СП относительно опорной СК Дарбу OдXдYдZд; ψг, ϕг, ϑг, γг - соответственно углы характеризующие положение СК O2X2Y2Z2, связанной с РВК, относительно СК O1X1Y1Z1, связанной с СП, положение СК O3X3Y3Z3, связанной с РТ, относительно СК O2X2Y2Z2, связанной с РВК, положение СК O4X4Y4Z4, связанной с ДР, относительно СК O3X3Y3Z3, связанной с РТ, положение СК OcXcYcZc, связанной с объектом, относительно СК O4X4Y4Z4, связанной с ДР. Пусть в начальный момент времени все введенные СК совпадают (оси гироплатформы ориентированы в географической СК). В результате скорости дрейфа гироскопов, вредных моментов по осям кардановых рам, выработки управляющих моментов, поступающих на гироскопы, а также необходимости обеспечения стабилизации гироплатформы при изменении объектом угловой ориентации в пространстве возникают скорости дрейфа СП  вокруг собственных осей, вызывающие отклонения осей СП на углы μ, β, α. Представленное на фиг. 2 изменение ориентации СП относительно СК Дарбу одновременно сопровождается изменением ориентации кардановых рам. При этом кардановые рамы начинают вращаться относительно СП. Абсолютная угловая скорость кардановых рам будет складываться: для РВК из переносной угловой скорости СП и относительной угловой скорости при ее вращении вокруг оси OA с угловой скоростью
вокруг собственных осей, вызывающие отклонения осей СП на углы μ, β, α. Представленное на фиг. 2 изменение ориентации СП относительно СК Дарбу одновременно сопровождается изменением ориентации кардановых рам. При этом кардановые рамы начинают вращаться относительно СП. Абсолютная угловая скорость кардановых рам будет складываться: для РВК из переносной угловой скорости СП и относительной угловой скорости при ее вращении вокруг оси OA с угловой скоростью  для РТ из переносной угловой скорости РВК и относительной угловой скорости при ее вращении вокруг оси ОВ с угловой скоростью
для РТ из переносной угловой скорости РВК и относительной угловой скорости при ее вращении вокруг оси ОВ с угловой скоростью  для ДР из переносной угловой скорости РТ и относительной угловой скорости при ее вращении вокруг оси ОС с угловой скоростью
для ДР из переносной угловой скорости РТ и относительной угловой скорости при ее вращении вокруг оси ОС с угловой скоростью  На фиг. 3 показаны относительные углы поворотов рам гироплатформы с четырехосным кардановым подвесом. Для составления уравнений связи между углами ориентации объекта ψ, ϑ, γ и углами, вырабатываемых гироплатформой ψг, ϑг, γг при наличии углов ее ухода μ, β, α, определим первую матрицу преобразования при последовательности поворотов μ→β→α→ψг→ϕг→ϑг и вторую матрицу преобразования при последовательности поворотов ψ→ϑ→γ→γг. Уравнения связи получим из сравнения, стоящих на одинаковых местах элементов этих двух матриц перехода от СК ОдХдYдZд (сопровождающая СК) к СК O4X4Y4Z4 (связанная с ДР). Матрицы преобразования для гироплатформы при последовательных поворотах μ→β→α→ψг→ϑг имеют вид
На фиг. 3 показаны относительные углы поворотов рам гироплатформы с четырехосным кардановым подвесом. Для составления уравнений связи между углами ориентации объекта ψ, ϑ, γ и углами, вырабатываемых гироплатформой ψг, ϑг, γг при наличии углов ее ухода μ, β, α, определим первую матрицу преобразования при последовательности поворотов μ→β→α→ψг→ϕг→ϑг и вторую матрицу преобразования при последовательности поворотов ψ→ϑ→γ→γг. Уравнения связи получим из сравнения, стоящих на одинаковых местах элементов этих двух матриц перехода от СК ОдХдYдZд (сопровождающая СК) к СК O4X4Y4Z4 (связанная с ДР). Матрицы преобразования для гироплатформы при последовательных поворотах μ→β→α→ψг→ϑг имеют вид
Матрица преобразования от СК Дарбу ОдХдYдZд к СК, O1X1Y1Z1, связанной с СП, с учетом малости углов μ, β, α:
Матрица преобразования при повороте РВК на угол ψг вокруг оси OA СП
Матрица преобразования при повороте РТ на угол ϕг вокруг оси ОВ РВК
Матрица преобразования при повороте ДР на угол ϑг вокруг оси ОС РТ
Матрица преобразования при последовательности поворотов от СК ОдХдYдZд (сопровождающая СК) к СК O4X4Y4Z4 (связанная с ДР)

где









Определим матрицу преобразования для объекта при последовательности поворотов ψ→ϑ→γ→γг. На фиг. 4 представлено расположение СК OcXcYcZc, связанной с объектом, относительно сопровождающей СК OдXдYдZд, в соответствии с которой получим.
Матрицу преобразования при повороте объекта на угол ψ
Матрицу преобразования при повороте объекта на угол ϑ

Матрицу преобразования при повороте объекта на угол γ
Матрицу преобразования при повороте СК, связанной с объектом на угол -γ

Матрица преобразования для объекта при последовательности поворотов ψ→ϑ→γ→γг от СК Дарбу OдXдYдZд к СК О4X4Y4Z4, связанной с ДР


где








Получим уравнения связи между углами ориентации объекта и углами обкатки гироплатформы. Элементы матриц  стоящие на одинаковых местах, тождественно равны между собой. Если угол ϕг мал, то углы ψг, ϑг, γг отличаются соответственно от углов ψ, ϑ, γ на малые углы δi (z=1, 2, 3). Введем обозначения
стоящие на одинаковых местах, тождественно равны между собой. Если угол ϕг мал, то углы ψг, ϑг, γг отличаются соответственно от углов ψ, ϑ, γ на малые углы δi (z=1, 2, 3). Введем обозначения

Тогда

Определим выражения для δi (i=1, 2, 3). Сравним элементы  матриц
матриц 

Подставив в (15) соответствующие выражения из (14) и учитывая малость ϕг, получим

Сравним элементы  матриц
матриц 

Подставив в (17) соответствующие выражения из (14) и проведя преобразования, получим

Сравним элементы  матриц
матриц 

Подставив в (19) соответствующие выражения из (14) и выполнив преобразования, получим

Выражения (16), (18), (20) показывают, что измеренные в известном способе параметры ориентации имеют погрешности обусловленные уходом стабилизированной площадки в горизонте и в азимуте и при этом имеет место перекрестное влияние. Так угол рыскания объекта ψ отличается от угла рыскания ψг, измеренного гироплатформой, на угол δ1, который обусловлен уходом стабилизированной площадки в азимуте μ и ее уходами в горизонте α и β, которые в свою очередь зависят от углов рыская ψг и тангажа ϑг. Углы ухода в азимуте μ и в горизонте α и β вызваны скоростями дрейфов стабилизированной площадки  На точность выработки гироплатформой угла тангажа ϑг соласно (16) влияют углы α и β ухода стабилизированной площадки в горизонте, связанные синусной и косинусной зависимостями с углом рыскания ψг. Погрешность измерения угла крена γ согласно (18) обусловлена углом ϕг поворота рамы тангажа относительно рамы внутреннего крена и углами ухода стабилизированной площадки в горизонте α и β, которые соответственно имеют косинусную и синусную зависимость от угла рыскания ψг, а алгебраическая сумма погрешностей от углов ϕт, α и β также имеет секосную зависимость от угла тангажа ϑг. Управление дополнительной рамой осуществляется таким образом, чтобы в установившемся состоянии угол ϕг был равен нулю с точностью до статической ошибки системы стабилизации. Таким образом, в известном способе имеются погрешности в выработке параметров ориентации. Особенно существенная и значимая погрешность имеет место при измерении истинного курса К (К=-ψ), так как в общей погрешности по курсу имеется составляющая μ, которая при скорости дрейфа курсового гироскопа
На точность выработки гироплатформой угла тангажа ϑг соласно (16) влияют углы α и β ухода стабилизированной площадки в горизонте, связанные синусной и косинусной зависимостями с углом рыскания ψг. Погрешность измерения угла крена γ согласно (18) обусловлена углом ϕг поворота рамы тангажа относительно рамы внутреннего крена и углами ухода стабилизированной площадки в горизонте α и β, которые соответственно имеют косинусную и синусную зависимость от угла рыскания ψг, а алгебраическая сумма погрешностей от углов ϕт, α и β также имеет секосную зависимость от угла тангажа ϑг. Управление дополнительной рамой осуществляется таким образом, чтобы в установившемся состоянии угол ϕг был равен нулю с точностью до статической ошибки системы стабилизации. Таким образом, в известном способе имеются погрешности в выработке параметров ориентации. Особенно существенная и значимая погрешность имеет место при измерении истинного курса К (К=-ψ), так как в общей погрешности по курсу имеется составляющая μ, которая при скорости дрейфа курсового гироскопа  в ИНС может достигать при продолжительном времени работы t существенных величин. Так при остаточной скорости дрейфа курсового гироскопа
в ИНС может достигать при продолжительном времени работы t существенных величин. Так при остаточной скорости дрейфа курсового гироскопа  погрешность выработки угла истинного курса за час работы в режиме "Навигация" может достигнуть величины
погрешность выработки угла истинного курса за час работы в режиме "Навигация" может достигнуть величины  что является критичной величиной для современных ИНС, а при более длительной работе эта погрешность становится не приемлимой.
что является критичной величиной для современных ИНС, а при более длительной работе эта погрешность становится не приемлимой.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является обеспечение возможности учета перекрестного влияния каналов гироплатформы при выработке инерциальной навигационной системой углов истинного курса, тангажа, крена, а также автономной коррекции показаний ее курсового канала в результате его комплексирования с двухканальным датчиком угловой скорости.
Технический результат достигается тем, что в известном способе определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы, включающей предварительное согласование измерительных осей инерциальной навигационной системы и объекта, проведение начальной выставки гироплатформы путем выполнения сперва приближенной выставки поворотами рам карданового подвеса до нулевого положения датчиков углов рам, затем выполнение точного горизонтирования с использованием акселерометров до установки стабилизированной площадки с гироскопами и акселерометрами в точное горизонтальное положение, после чего проведение гирокомпасирования, при котором стабилизированную площадку удерживают в плоскости горизонта и, используя северный акселерометр, заставляют прецессировать курсовой гироскоп и поворачивать стабилизированную площадку до совпадения ее горизонтальных осей, связанных с осями чувствительности горизонтальных акселерометров, с направлениями на север и восток, а в рабочем режиме производят определение угла рыскания ψг объекта с датчика угла поворота рамы внутреннего крена относительно стабилизированной площадки, угла тангажа ϑг с датчика поворота дополнительной рамы относительно рамы тангажа, угла крена γг с датчика угла поворота объекта относительно дополнительной рамы, угла ϕг поворота рамы тангажа относительно рамы внутреннего крена, а также вырабатывают углы широты ϕ, долготы λ местоположения объекта и скорости изменения этих углов  дополнительно предварительно выполняют подготовительные работы по комплексированию курсового канала инерциальной навигационной системы с двухканальным датчиком угловой скорости, для чего в вычислитель системы устанавливают программное обеспечение оптимального фильтра, оценивающего ошибку определения истинного курса курсовым каналом инерциальной навигационной системы, и программное обеспечение формирования моделей скоростей дрейфов стабилизированной площадки по курсу
дополнительно предварительно выполняют подготовительные работы по комплексированию курсового канала инерциальной навигационной системы с двухканальным датчиком угловой скорости, для чего в вычислитель системы устанавливают программное обеспечение оптимального фильтра, оценивающего ошибку определения истинного курса курсовым каналом инерциальной навигационной системы, и программное обеспечение формирования моделей скоростей дрейфов стабилизированной площадки по курсу  тангажу
тангажу  крену
крену  углов ее ухода по курсу μм, тангажу βм, крену αм, а также моделей скоростей дрейфов
углов ее ухода по курсу μм, тангажу βм, крену αм, а также моделей скоростей дрейфов  по двум каналам датчика угловой скорости, располагают датчик угловой скорости с двумя осями чувствительности на корпусе объекта, связывают его с инерциальной навигационной системой линиями электропитания и информации, выполняют фазировку сигналов измерительных каналов датчика угловой скорости с направлением азимутального поворота объекта, согласовывают оси чувствительности датчика с продольной осью объекта и осью, направленной к правому борту, закрепляют в этом согласованном положении датчик угловой скорости на объекте, вводят в вычислитель системы, значения масштабных коэффициентов его каналов K1, К2, а в рабочем режиме измеряют углы рыскания ψг, тангажа ϑг, крена γг, угла поворота ϕг, рамы тангажа относительно рамы внутреннего крена, снимают показания U1, U2 с датчика угловой скорости по двум каналам и направляют их в вычислитель инерциальной навигационной системы, в котором формируют модели скоростей дрейфов
по двум каналам датчика угловой скорости, располагают датчик угловой скорости с двумя осями чувствительности на корпусе объекта, связывают его с инерциальной навигационной системой линиями электропитания и информации, выполняют фазировку сигналов измерительных каналов датчика угловой скорости с направлением азимутального поворота объекта, согласовывают оси чувствительности датчика с продольной осью объекта и осью, направленной к правому борту, закрепляют в этом согласованном положении датчик угловой скорости на объекте, вводят в вычислитель системы, значения масштабных коэффициентов его каналов K1, К2, а в рабочем режиме измеряют углы рыскания ψг, тангажа ϑг, крена γг, угла поворота ϕг, рамы тангажа относительно рамы внутреннего крена, снимают показания U1, U2 с датчика угловой скорости по двум каналам и направляют их в вычислитель инерциальной навигационной системы, в котором формируют модели скоростей дрейфов  стабилизированной площадки гироплатформы, углы ее ухода в горизонте βм, αм и в азимуте μм, модели углов рыскания ψм, тангажа ϑм, крена γм объекта, учитывающие уходы стабилизированной площадки и перекрестное влияние каналов гироплатформы, модели скоростей изменения углов рыскания
стабилизированной площадки гироплатформы, углы ее ухода в горизонте βм, αм и в азимуте μм, модели углов рыскания ψм, тангажа ϑм, крена γм объекта, учитывающие уходы стабилизированной площадки и перекрестное влияние каналов гироплатформы, модели скоростей изменения углов рыскания  тангажа
тангажа  крена
крена  модели скоростей дрейфов
модели скоростей дрейфов  датчика угловой скорости по двум каналам, после этого вырабатывают модельный угол истинного курса Км курсового канала системы, используя значения углов рыскания ψг, тангажа ϑг, и модельные значения углов ухода μм, βм, αм стабилизированной площадки, вырабатывают модельное значение угла истинного курса Кдм на основе показаний датчика угловой скорости U1, U2, используя модельные значения углов ориентации ψм, ϑм, γм, скоростей их изменения
датчика угловой скорости по двум каналам, после этого вырабатывают модельный угол истинного курса Км курсового канала системы, используя значения углов рыскания ψг, тангажа ϑг, и модельные значения углов ухода μм, βм, αм стабилизированной площадки, вырабатывают модельное значение угла истинного курса Кдм на основе показаний датчика угловой скорости U1, U2, используя модельные значения углов ориентации ψм, ϑм, γм, скоростей их изменения  модельные значения скоростей дрейфа
модельные значения скоростей дрейфа  датчика угловой скорости, а также выработанных системой значений широты ϕ, долготы λ, скоростей их изменения
датчика угловой скорости, а также выработанных системой значений широты ϕ, долготы λ, скоростей их изменения  и задаваемых значений масштабных коэффициентов К1, К2, угловой скорости Земли Ω, затем находят разность модельных значений углов истинного курса Км и Кдм, которую направляют на вход оптимального фильтра, с помощью которого получают оценку
и задаваемых значений масштабных коэффициентов К1, К2, угловой скорости Земли Ω, затем находят разность модельных значений углов истинного курса Км и Кдм, которую направляют на вход оптимального фильтра, с помощью которого получают оценку  погрешности выработки угла истинного курса Км, которую вычитают в сумматоре из модельного значения Км, выработанного в курсовом канале системы и получают оптимальный угол Ко истинного курса объекта, который совместно с модельными значениями углов ϑм и γм используют как выходные углы ориентации объекта, выработанные инерциальной навигационной системой, при этом модельные курсовые углы Км, Кдм, оптимальный курсовой угол Ко, модельные значения углов ориентации объекта ψм, ϑм, γм и их скоростей изменения
погрешности выработки угла истинного курса Км, которую вычитают в сумматоре из модельного значения Км, выработанного в курсовом канале системы и получают оптимальный угол Ко истинного курса объекта, который совместно с модельными значениями углов ϑм и γм используют как выходные углы ориентации объекта, выработанные инерциальной навигационной системой, при этом модельные курсовые углы Км, Кдм, оптимальный курсовой угол Ко, модельные значения углов ориентации объекта ψм, ϑм, γм и их скоростей изменения  определяют с помощью следующих формул
определяют с помощью следующих формул











Формулы (16), (18), (20) характеризуют погрешности выработки параметров ориентации платформенной инерциальной навигационной системой, обусловленные уходами стабилизированной площадки в том числе вследствие перекрестного влияния каналов. Из выражений (13) уточненные параметры ориентации можно представить

Подставив (16), (18), (20) в (24) получим выражения для определения углов рыскания, тангажа, крена, учитывающие уходы стабилизированной площадки и перекрестные влияния каналов гироплатформы, которые имеют вид



Продифференцировав выражения (25), (26), (27), получим скорости изменения углов ориентации



При точных значениях углов ориентации стабилизированной площадки μ, β, α гироплатформы и углах поворота кардановых рам ψг, ϑг, γг друг относительно друга выражения (25), (26), (27) позволяют точно определять параметры ориентации объекта, а выражения (29), (29), (30) скорости их изменения. На практике измерение углов ψг, ϑг, γг может происходить с ошибками, а углы μ, β, α моделируются инерциальной навигационной системой также с ошибками. Поэтому, используя показания датчиков углов положения рам гироплатформы ψг, ϑг, γг, ϕг и модельные значения углов ориентации СП μм, βм, αм, будем иметь модельные значения параметров ориентации объекта, которые имеют модельные погрешности δ1м, δ2м, δ3м.






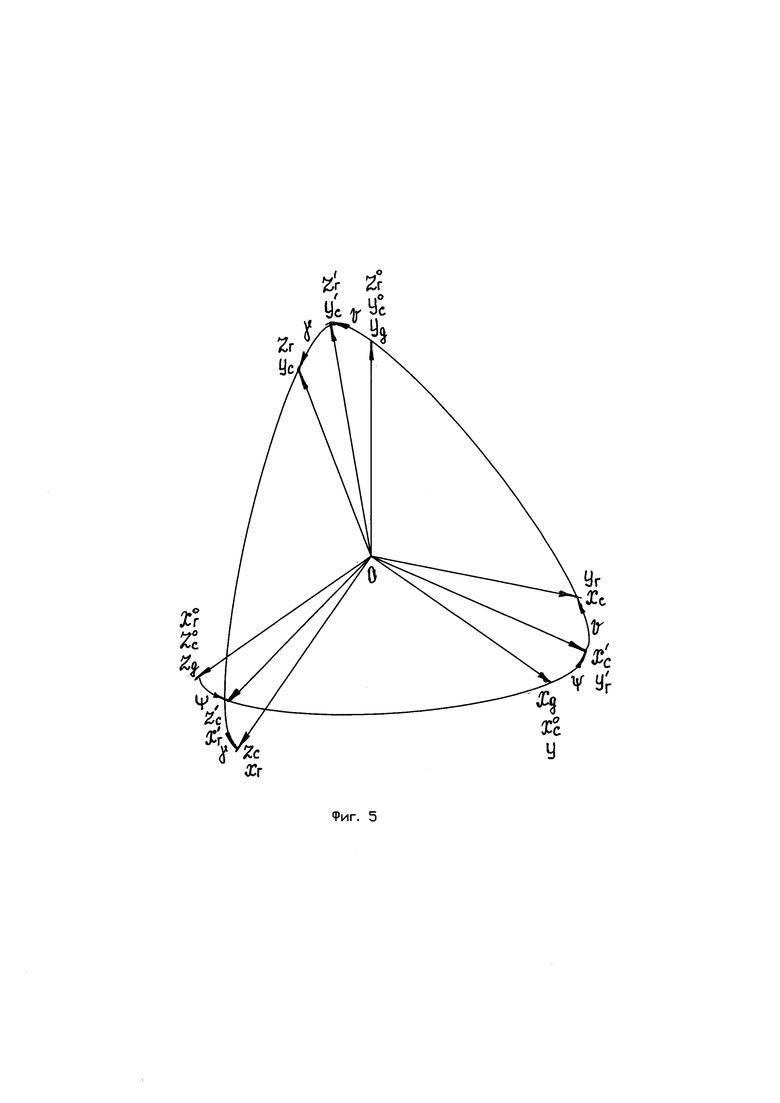
Для выработки оценки погрешности  определения модельного угла истинного курса (Км= -ψм) проведем комплексирование курсового канала инерциальнай навигационной системы с датчиком угловой скорости. В начале рассмотрим гирокомпасирование с применением датчика угловой скорости, для чего используем системы координат, представленные на фиг. 4 и фиг. 5. На фиг. 4 показано взаимное расположение геоцентрической навигационной системы координат OнXнYнZн, сопровождающей системы координат Дарбу OдXдYдZд, системы координат, связанной с объектом OcXcYcZc. Отсчет геоцентрической широты ϕ производится между плоскостью экватора и направлением на объект радиуса - вектора. Геоцентрическая долгота λ определяется как двухгранный угол между плоскостями, образованными Гринвичским меридианом и меридианом, проходящим через точку, характеризующую местоположение объекта. На фиг. 5 представлено взаимное расположение системы координат Дарбу OдXдYдZд, системы координат OcXcYcZc, связанной с объектом, и системы координат OгXгYгZг, связанной с датчиком угловой скорости. В СК OгXгYгZг оси ОгХг и OгYг расположены в измерительной плоскости датчика угловой скорости, при этом ось ОгХг направлена по измерительной оси второго канала, а ось OгYг по измерительной оси первого канала гироскопа, а ось OгZг направлена так, чтобы образовывалась правая СК. Пусть в начальный момент времени оси, связанные с гироскопом и объектом, совпадают с СК Дарбу так как показано на фиг. 5. В следствие углового движения объекта в азимуте со скоростью рыскания
определения модельного угла истинного курса (Км= -ψм) проведем комплексирование курсового канала инерциальнай навигационной системы с датчиком угловой скорости. В начале рассмотрим гирокомпасирование с применением датчика угловой скорости, для чего используем системы координат, представленные на фиг. 4 и фиг. 5. На фиг. 4 показано взаимное расположение геоцентрической навигационной системы координат OнXнYнZн, сопровождающей системы координат Дарбу OдXдYдZд, системы координат, связанной с объектом OcXcYcZc. Отсчет геоцентрической широты ϕ производится между плоскостью экватора и направлением на объект радиуса - вектора. Геоцентрическая долгота λ определяется как двухгранный угол между плоскостями, образованными Гринвичским меридианом и меридианом, проходящим через точку, характеризующую местоположение объекта. На фиг. 5 представлено взаимное расположение системы координат Дарбу OдXдYдZд, системы координат OcXcYcZc, связанной с объектом, и системы координат OгXгYгZг, связанной с датчиком угловой скорости. В СК OгXгYгZг оси ОгХг и OгYг расположены в измерительной плоскости датчика угловой скорости, при этом ось ОгХг направлена по измерительной оси второго канала, а ось OгYг по измерительной оси первого канала гироскопа, а ось OгZг направлена так, чтобы образовывалась правая СК. Пусть в начальный момент времени оси, связанные с гироскопом и объектом, совпадают с СК Дарбу так как показано на фиг. 5. В следствие углового движения объекта в азимуте со скоростью рыскания  оси OcZc, ОсХс, связанные с объектом, и оси ОгХг, OгYг, связанные с гироскопом, повернуться на азимутальный угол ψ. В следствие углового движения объекта по тангажу
оси OcZc, ОсХс, связанные с объектом, и оси ОгХг, OгYг, связанные с гироскопом, повернуться на азимутальный угол ψ. В следствие углового движения объекта по тангажу  объект и гироскоп наклонятся на угол ϑ по тангажу, а от углового движения
объект и гироскоп наклонятся на угол ϑ по тангажу, а от углового движения  по крену объект и гироскоп наклонятся на угол γ. В следствие движения объекта относительно поверхности Земли с путевой скоростью V возникают угловые скорости, характеризующие скорости изменения долготы
по крену объект и гироскоп наклонятся на угол γ. В следствие движения объекта относительно поверхности Земли с путевой скоростью V возникают угловые скорости, характеризующие скорости изменения долготы  и широты
и широты  объекта:
объекта:

где R - радиус Земли, V - путевая скорость объекта, К - курсовой угол объекта, отсчитываемый по часовой стрелке от северного направления.
С датчика угловой скорости снимаются выходные сигналы U1 и U2 по первому и второму каналам:

где ωх, ωу - проекции абсолютной угловой скорости корпуса гироскопа соответственно по осям ОгХг, OгYг;  - скорости дрейфа гироскопа соответственно по осям ОгХг, OгYг.
- скорости дрейфа гироскопа соответственно по осям ОгХг, OгYг.
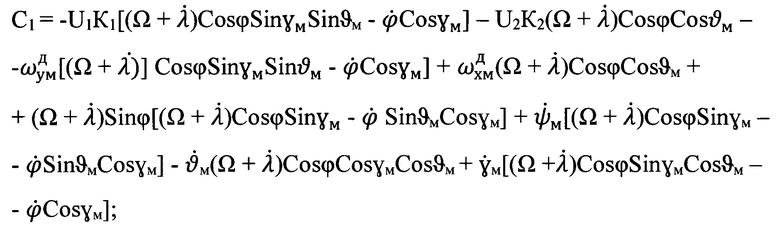
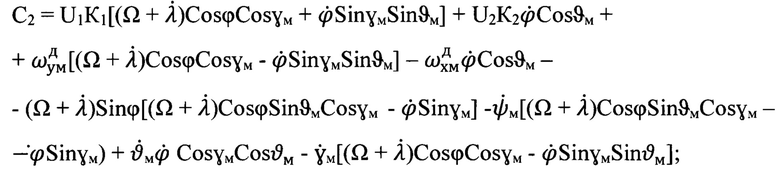
В соответствии с взаимным расположением выбранных систем координат проекции абсолютной угловой скорости на оси гироскопа, в случае углового и линейного движения объекта относительно Земли, имеют вид


Подставив (39) в (38) получим следующую систему линейных уравнений

где






Решая уравнения (40), определяем выражения для С1=Sirψ и С2=Cosψ, угол истинного курса вычислим через функцию арктангенс. Тогда аналитическое выражение для определения угла рыскания ψ можно представить в следующем виде

где

При использовании функции тангенса квадрат, в котором расположен угол рыскания ψ, можно вычислить по соотношению знаков С1 и С2. Зная квадрант, формулу для вычисления истинного курса можно представить в виде



При точных заданиях в выражениях (41) значений параметров можно точно определить угол истинного курса объекта с помощью двухканального датчика угловой скорости. Однако на практике, используемые в (41) параметры, вырабатываются инерциальной навигационной с некоторыми погрешностями, что обуславливает суммарную погрешность выработки истинного курсового угла системой на основе показаний U1, U2 датчика угловой скорости. Поучаемый при этом с погрешностью истинный курс будем называть модельным, так как эта погрешность зависит от точности используемых моделей параметров в (41). Тогда для модельного угла истинного курса сделаем следующие обозначения


где

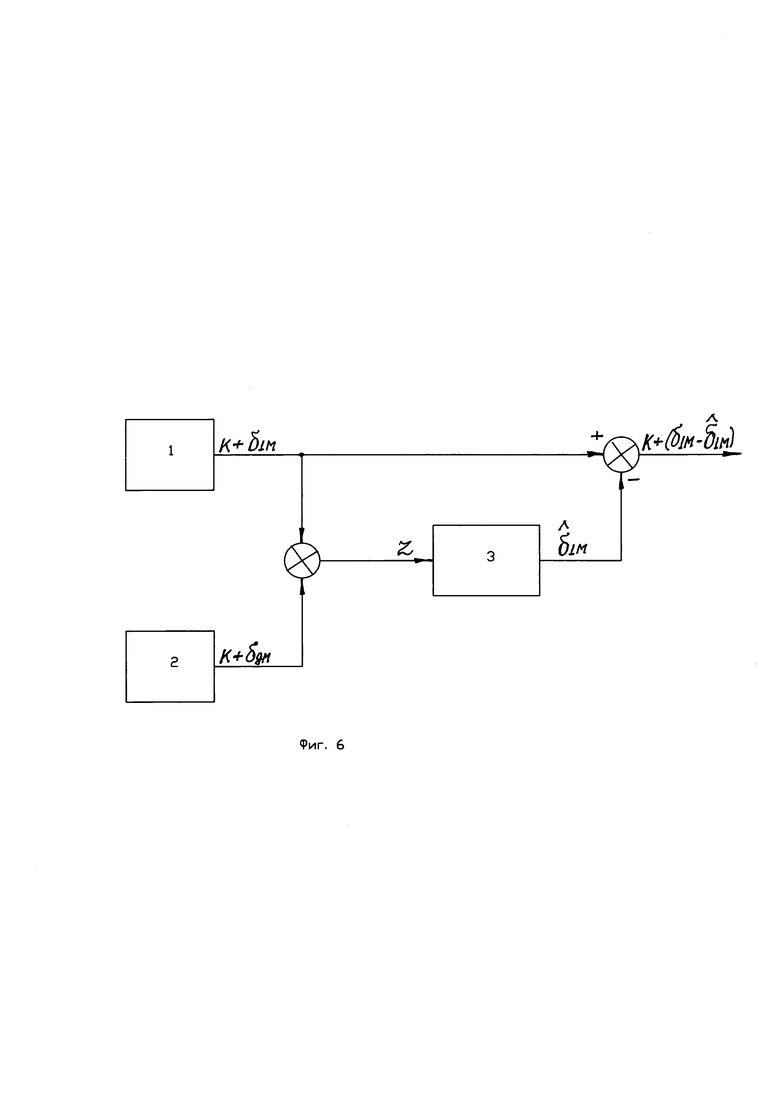
Структурная схема комплексирования, показанная на фиг. 6, представляет из себя две измерительные системы, предназначенные для выработки курсового угла объекта, которыми являются курсовой канал 1 инерциальной навигационной системы и датчик угловой скорости 2. Системы вырабатывают истинное значение курсового угла К с погрешностями соответственно δ1м и δдм, то есть К1м=К+δ1м и Кдм=К+δдм. Сигнал измерения Z, поступающий на оптимальный фильтр 3, формируется в виде разностного сигнала Z=δ1м-δдм, который не содержит К. Оптимальный фильтр, сформированный с учетом статистических свойств погрешностей δ1м и δдм реализуется в вычислителе инерциальной навигационной системы, используя измерения, вырабатывает оптимальные оценки вектора состояния системы, из которых затем получают оптимальные оценки  Считая основным собственный курсовой канал инерциальной навигационной системы и, выделяя на выходе оптимального фильтра оптимальную оценку погрешности
Считая основным собственный курсовой канал инерциальной навигационной системы и, выделяя на выходе оптимального фильтра оптимальную оценку погрешности  этого канала, выработку параметра К производят с погрешностью, равной ошибке оптимальной оценки
этого канала, выработку параметра К производят с погрешностью, равной ошибке оптимальной оценки  В соответствии с теорией оптимальных систем полученная ошибка
В соответствии с теорией оптимальных систем полученная ошибка  определения курсового угла курсовым каналом системы меньше ошибки δ1м, которую он имел до комплексирования.
определения курсового угла курсовым каналом системы меньше ошибки δ1м, которую он имел до комплексирования.
Таким образом, предлагаемый способ определения параметров ориентации при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы имеет следующие отличия от известного способа:
1. В подготовительных операциях введены следующие новые действия по комплексированию курсового канала инерциальной навигационной системы с двухканальным датчиком угловой скорости:
- загружают в вычислитель системы программы формирования моделей скоростей дрейфов стабилизированной площадки по курсу  тангажу
тангажу  крену
крену  и углов ее ухода по курсу μм, тангажу βм, крену αм, программу формирования моделей скоростей дрейфов
и углов ее ухода по курсу μм, тангажу βм, крену αм, программу формирования моделей скоростей дрейфов  датчика угловой скорсти, программу оптимального фильтра для оценки ошибки определения истинного курса собственным курсовым каналом с использование показаний датчика угловой скорости;
датчика угловой скорсти, программу оптимального фильтра для оценки ошибки определения истинного курса собственным курсовым каналом с использование показаний датчика угловой скорости;
- располагают датчик угловой скорости на корпусе объекта;
- связывают датчик угловой скорости с инерциальной навигационной системой линиями электропитания и информации;
- выполняют фазировку сигналов измерительных каналов датчика угловой скорости с направлением азимутального поворота объекта;
- согласовывают оси чувствительности датчика угловой скорости с продольной осью объекта и осью, направленной к правому борту;
-закрепляют датчик угловой скорости на корпусе объекта в согласованном положении осей объекта и датчика;
- вводят в вычислитель системы значения масштабных коэффициентов каналов датчика угловой скорости.
2. В рабочем режиме инерциальной навигационной системы введены следующие новые действия:
- снимают по двум каналам показания с датчика угловой скорости, установленного на корпусе объекта, и направляют их в вычислитель системы;
- формируют в вычислителе системы модели скоростей дрейфов стабилизированной площадки по курсу, тангажу, крену и модели ее ухода по курсу, тангажу и крену, модели скоростей дрейфов датчика угловой скорости;
- вырабатывают модельное значение угла Км истинного курса объекта, определяемого с помощью курсового канала системы, с учетом перекрестного влияния углов ухода стабилизированной площадки по азимуту, в горизонте и углов рыскания и тангажа объекта;
- вырабатывают модельные углы тангажи ϑм, крена γм объекта с учетом моделей уходов стабилизированной площадки и перекрестного влияния каналов;
- вырабатывают в вычислителе системы модельные значения угла Кдм истинного курса объекта, полученное на основе показаний датчика угловой скорости;
- получают оценку  погрешности выработки модельного угла Км истинного курса системой, используя оптимальный фильтр, модельное значение Км курсового канала системы, модельное значение Кдм, полученное на основе показаний датчика угловой скорости;
погрешности выработки модельного угла Км истинного курса системой, используя оптимальный фильтр, модельное значение Км курсового канала системы, модельное значение Кдм, полученное на основе показаний датчика угловой скорости;
- вырабатывают оптимальный в смысле минимизации погрешности угол истинного курса объекта, используя оценку  погрешности выработки модельного угла Км истинного курса объекта инерциальной навигационной системой;
погрешности выработки модельного угла Км истинного курса объекта инерциальной навигационной системой;
- выработка модельных углов истинного курса Км, Кдм, тангажа ϑм, крена γм происходит с использованием новых аналитических зависимостей, учитывающих перекрестное влияние углов ухода стабилизированной площадки гироплатформы в горизонте, а также углов тангажа и рыскания объекта.
На фиг. 1 показана кинематическая схема гироплатформы с четырехосным кардановым подвесом.
На фиг. 2 представлено расположение системы координат O1X1Y1Z1, связанной со стабилизированной площадкой гироплатформы, относительно сопровождающей системы координат Дарбу.
На фиг. 3 показаны относительные углы поворотов рам гироплатформы с четырехосным кардановым подвесом.
На фиг. 4 показано взаимное расположение геоцентрической навигационной системы координат ОнXнYнZн, сопровождающей системы координат Дарбу OдXдYдZд, системы координат OcXcYcZc, связанной с объектом.
На фиг. 5 представлено взаимное расположение системы координат OcXcYcZc, связанной с объектом, системы координат OгXгYгZг, свяязанной с датчиком угловой скорости, относительно сопровождающей системы координат Дарбу ОдXдYдZд.
На фиг. 6 представлена структурная схема комплексной системы выработки истинного курса объекта, состоящая из курсового канала инерциальной навигационной системы и системы с датчиком угловой скорости.
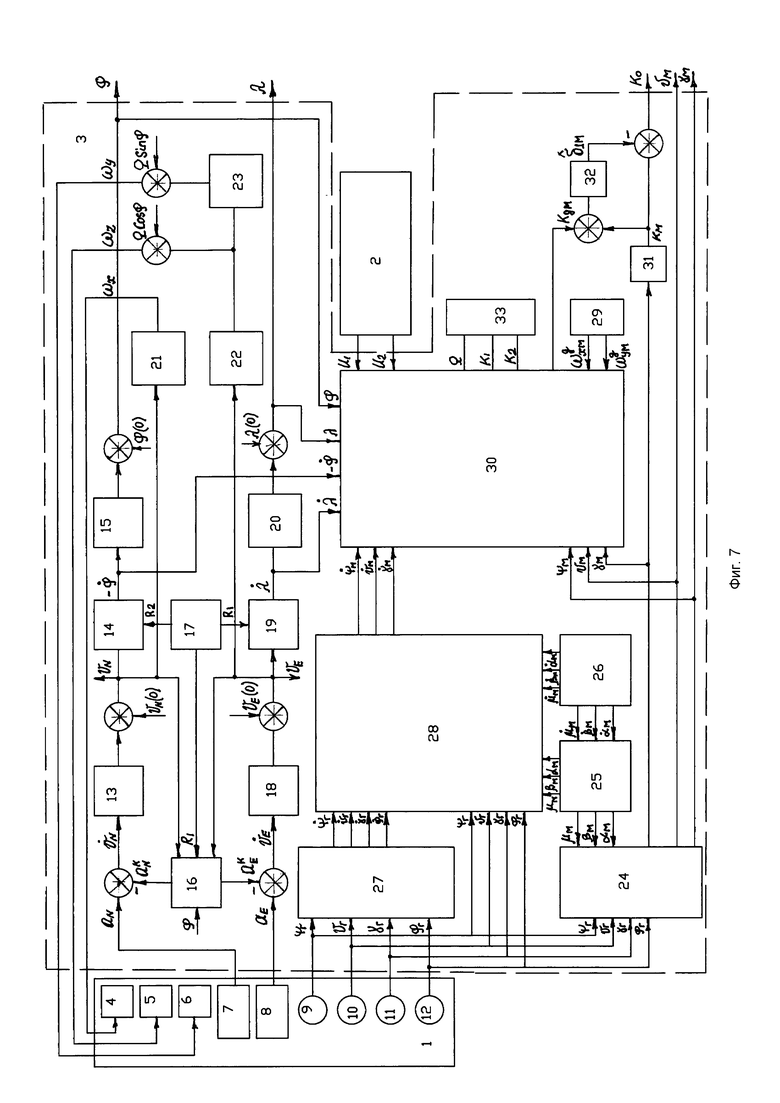
На фиг. 7 показана структурная схема полуаналитической инерциальной навигационной системы с географической ориентацией осей, курсовой канал которой комплексируется с двухканальным датчиком угловой скорости.
На фиг. 7 представлена структурная схема полуаналитической инерциальной системы с географической ориентацией осей, курсовой канал которой комплексируется с двухканальным датчиком угловой скорости. Данная комплексная система содержит: гироплатформу 1; двухканальный датчик угловой скорости 2; блок электроники системы 3; канал 4 управления стабилизированной площадкой гироплатформы по оси, направленной на север; канал 5 управления стабилизированной площадкой по оси, направленной на восток; канал 7 управления стабилизированной площадкой по азимутальной оси; акселерометр 7, измеряющий ускорения, действующие по северной оси стабилизированной площадки; акселерометр 8, измеряющий ускорения, действующие по восточной оси стабилизированной площадки; датчик угла 9 поворота рамы внутреннего крена относительно стабилизированной площадки (датчик угла рыскания ψг); датчик угла 10 поворота дополнительной рамы относительно рамы тангажа (датчик угла тангажа ϑг); датчик угла 11 поворота объекта относительно дополнительной рамы (датчик угла крена γг); датчик угла 12 поворота рамы тангажа относительно рамы внутреннего крена (датчик угла ϕг); блок 13 интегрирования скомпенсированных показаний северного акселерометра; блок 14 выработки скорости изменения широты местоположения объекта; блок 15 интегрирования скорости изменения широты; блок 16 выработки компенсаций ошибок акселерометров; блок 17 выработки радиусов кривизны земного эллипсоида; блок 18 интегрирования скомпенсированных показаний восточного акселерометра; блок 19 выработки скорости изменения долготы; блок 20 интегрирования скорости изменения долготы; блок 21 выработки коэффициента обратно пропорционального коэффициенту интегральной коррекции северного канала; блок 22 выработки коэффициента обратно пропорционального коэффициенту интегральной коррекции восточного канала; блок 23 выработки тангенса угла широты; блок 24 выработки модельных значений параметров ориентации объекта; блок 25 выработки моделей углов ухода стабилизированной площадки; блок 26 выработки моделей скоростей дрейфа стабилизированной площадки; блок 27 выработки скоростей изменения углов ориентации объекта, определяемых гироплатформой; блок 28 выработки моделей скоростей изменения углов ориентации объекта; блок 29 выработки моделей скоростей дрейфа датчика угловой скорости; блок 30 выработки модели угла истинного курса объекта, определяемого с помощью датчика угловой скорости; блок 31 преобразования угла рыскания в угол курса; блок 32 оптимального фильтра, вырабатывающего оценку погрешности определения модели истинного курса с помощью курсового канала инерциальной навигационной системы; блок 33 постоянных параметров.
В рабочем режиме с гироплатформы 1 от северного 7 и восточного 8 акселерометров в блок электроники 3 системы поступают сигналы aN и аЕ пропорциональные проекциям кажущихся ускорений объекта на оси стабилизированной площадки О1Х1, O1Z1. Измерительные оси акселерометров 7 и 8 направлены вдоль осей системы координат Дарбу (сопровождающего географического трехгранника) и показания акселерометров имеют вид


где  - проекции относительных линейных ускорений на оси чувствительности акселерометров.
- проекции относительных линейных ускорений на оси чувствительности акселерометров.
Для получения скорости движения объекта по поверхности Земли необходимо, чтобы на входы первых интеграторов 13 и 19 поступали только ускорения относительного движения  Следовательно ускорения Кориолиса и ускорения, связанные с криволинейностью движения объекта, должны быть скомпенсированы. Для этого в блоке 16 выработки сигналов компенсации формируются компенсирующие сигналы вида
Следовательно ускорения Кориолиса и ускорения, связанные с криволинейностью движения объекта, должны быть скомпенсированы. Для этого в блоке 16 выработки сигналов компенсации формируются компенсирующие сигналы вида


Для выработки этих компенсационных сигналов в блок 16 с блока 17 выработки радиусов криволинейной поверхности эллипсоида Земли поступают радиусы R1 и R2. Кроме этих радиусов в блок 16 подаются выработанные системой широта ϕ местоположения объекта и горизонтальные составляющие его относительной линейной скорости  Таким образом, на входы первых интеграторов поступают
Таким образом, на входы первых интеграторов поступают


После интегрирования в интеграторах 13, 18, с учетом ввода начальных скоростей vN(0) и vE(0), получают северную и восточную составляющие относительной скорости движения объекта

Выполнив в блоках 14, 19 деление vN и vE соответственно на R2 и R1Cosϕ получим на их выходах скорости изменения широты  и долготы
и долготы  Координаты местоположения объекта вычисляются с помощью вторичного интегрирования с учетом начальных координат ϕ0 и λ0 в блоках 15, 20
Координаты местоположения объекта вычисляются с помощью вторичного интегрирования с учетом начальных координат ϕ0 и λ0 в блоках 15, 20

Углы рыскания ψг, тангажа ϑг, крена γг и угол ϕг снимают с датчиков относительных угловых положений рам 9, 10, 11, 12.
Для сохранения стабилизированной площадкой гироплатформы географической ориентации в каналы ее управления 4, 5, 6 подают управляющие воздействия, обуславливающие угловые скорости равные угловым скоростям сопровождающего трехгранника Дарбу.


что обеспечивается по северному каналу блоком 21, который имеет коэффициент передачи  где Rп2 - коэффициент интегральной коррекции северного канала,
где Rп2 - коэффициент интегральной коррекции северного канала,  где Кп2 - коэффициент пропорциональности интегральной коррекции северного канала; по восточному каналу блоком 22, который имеет коэффициент передачи
где Кп2 - коэффициент пропорциональности интегральной коррекции северного канала; по восточному каналу блоком 22, который имеет коэффициент передачи  где Rп1 - коэффициент интегральной коррекции восточного канала,
где Rп1 - коэффициент интегральной коррекции восточного канала,  где Кп1 - коэффициент пропорциональности интегральной коррекции восточного канала; по азимутальному каналу блоком 22 и блоком 23 с коэффициентом передачи равном tgϕ.
где Кп1 - коэффициент пропорциональности интегральной коррекции восточного канала; по азимутальному каналу блоком 22 и блоком 23 с коэффициентом передачи равном tgϕ.
Таким образом описанная схема алгоритма работы полуаналитической инерциальной навигационной системы с географической ориентацией осей реализует выработку параметров ориентации ψг, ϑг, γг и параметров навигации vN, vE, ϕ, λ, скоростей изменения широты  и долготы
и долготы 
Для выработки уточненных параметров ориентации, учитывающих перекрестное влияние каналов, сигналы ψг, ϑг, γг, ϕг с датчиков углов 9, 10, 11, 12 поступают в блок выработки модельных значений параметров ориентации объекта 24. В этом блоке происходит выработка модельных параметров ориентации объекта с использованием выражений (31), (32), (33). Значения αм, βм, характеризующие наклон стабилизированной площадки, приходят в блок 24 из блока выработки моделей углов ухода стабилизированной площадки гироплатформы 25.
На основе предварительных исследований разрабатывается модель погрешностей стабилизированной площадки, которая в том числе учитывает влияние силовых, тепловых, электромагнитных факторов, которая в рабочем режиме уточняется в результате использования прогнозирующих алгоритмов. В качестве которых можно использовать алгоритм модифицированного тренда. Алгоритм построения моделей скоростей дрейфов стабилизированной площадки реализуется в блоке выработки моделей ее скоростей дрейфа 26. С блока 26 модели скоростей дрейфа поступают в блок в блок 25, где в результате интегрирования получают модельные уходы μм, βм, αм стабилизированной площадки. В блоке 28 вырабатывают модели скоростей изменения углов ориентации объекта с применением выражений (34), (35), (36). Для формирования моделей скоростей изменения углов ориентации с блока 27 в блок 28 поступают скорости изменения углов ориентации, получаемые после дифференцирования в 27 сигналов с датчиков гироплатформы 9, 10, 11, 12. Также с этих датчиков сигналы углов ориентации поступают в блок 28 и кроме этого в него подаются значения модельных углов стабилизированной площадки с блока 25 и скоростей их изменения с блока 26. В блоке 30 вырабатывается модель угла истинного курса Кдм, объекта, определяемого с помощью датчика угловой скорости 2, используя выражения (43). Для выработки Кдм с помощью выражений (43) в блок 30 с блока 26 поступают значения ψм, ϑм, γм, а с блока 28 значения их производных 
 Также в блок 30 поступают выработанные инерциальной навигационной системой параметры навигации
Также в блок 30 поступают выработанные инерциальной навигационной системой параметры навигации  а с блока постоянных параметров 33 значения угловой скорости Земли, масштабные коэффициенты К1, К2 первого и второго каналов датчика угловой скорости. С датчика угловой скорости 2 в блок 30 подаются выходные сигналы U1, U2 по первому и второму каналам. В блоке 29 происходит выработка моделей скоростей дрейфов по первому и второму каналам датчика угловой скорости, которые также поступают в блок 30. Алгоритм построения в блоке 29 на борту объекта использует прогнозирующий тренд, который реализуется на основе опорных моделей погрешностей, построенных на базе предварительной информации.
а с блока постоянных параметров 33 значения угловой скорости Земли, масштабные коэффициенты К1, К2 первого и второго каналов датчика угловой скорости. С датчика угловой скорости 2 в блок 30 подаются выходные сигналы U1, U2 по первому и второму каналам. В блоке 29 происходит выработка моделей скоростей дрейфов по первому и второму каналам датчика угловой скорости, которые также поступают в блок 30. Алгоритм построения в блоке 29 на борту объекта использует прогнозирующий тренд, который реализуется на основе опорных моделей погрешностей, построенных на базе предварительной информации.
С целью повышения точности выработки истинного курса объекта в инерциальной навигационной системе выполнено комплексирование курсового канала системы с датчиком угловой скорости 2, для чего используется оптимальный фильтр 32, который включен в разомкнутую схему. С помощью курсового канала системы и датчика угловой скорости вырабатывается угол истинного курса К. Курсовой канал и датчик угловой скорости вырабатываю курс К с погрешностями соответственно δ1м и δдм. С курсового канала системы на сумматор поступает сигнал Км=К+δ1м, который получается из сигнала ψм, умноженного в блоке 31 на (-1). С блока 30 на сумматор подается сигнал Кдм=К+δдм. Сигналы Км и Кдм поступают на сумматор, где формируется разностный сигнал измерения Z=δ1м-δдм, который не содержит К. Оптимальный фильтр 32, сформированный с учетом статистических свойств погрешностей δ1м и δдм, реализованный в вычислителе системы, используя измерения, вырабатывает оптимальные оценки вектора состояния системы курсового канала и датчика угловой скорости, из которых получаются оптимальные оценки  погрешностей. Считая основным курсовой канал системы и выделяя на выходе оптимального фильтра оптимальную оценку погрешности
погрешностей. Считая основным курсовой канал системы и выделяя на выходе оптимального фильтра оптимальную оценку погрешности  этого канала, выработка истинного курсового угла К0 с погрешностью, равной ошибке оптимальной оценки
этого канала, выработка истинного курсового угла К0 с погрешностью, равной ошибке оптимальной оценки  осуществляется с помощью суммирующего устройства, стоящего на выходе фильтра.
осуществляется с помощью суммирующего устройства, стоящего на выходе фильтра.
Использование предлагаемого способа позволяет повысить точность выработки полуаналитической инерциальной навигационной системой параметров ориентации за счет учета влияния перекрестных каналов в гироплатформе системы, а также путем применения комплексирования курсового канала системы с двухканальным датчиком угловой скорости для выработки оптимальной оценки погрешности определения истинного курса курсовым каналом системы. Применение предлагаемого способа позволяет расширить область применения полуаналитической инерциальной навигационной системы за счет повышения точности определения параметров ориентации объекта.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| СПОСОБ СЧИСЛЕНИЯ КООРДИНАТ ПРИ НЕОРТОГОНАЛЬНОЙ ОРИЕНТАЦИИ ВХОДНЫХ ОСЕЙ ИЗМЕРИТЕЛЕЙ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ | 2020 |
|
RU2785971C2 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ, УСТАНОВЛЕННОГО НА УПРАВЛЯЕМУЮ В АЗИМУТЕ И СТАБИЛИЗИРОВАННУЮ В ПЛОСКОСТИ МЕСТНОГО ГОРИЗОНТА ПЛАТФОРМУ | 2002 |
|
RU2210740C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2017 |
|
RU2671937C1 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |

Изобретение относится к области точного приборостроения и может быть использовано для повышения точности выработки параметров ориентации полуаналитической инерциальной навигационной системы (ИНС) с географической ориентацией ее осей. Сущность заявленного изобретения заключается в следующем. Предварительное проведение подготовительных работ связано с комплексированием курсового канала ИНС с датчиком угловой скорости (ДУС). С этой целью располагают ДУС на корпусе объекта, связывают ДУС с ИНС линиями электропитания и информации, выполняют фазировку сигналов измерительных каналов ДУС с направлением азимутального поворота объекта, согласовывают оси чувствительности ДУС с продольной осью объекта и направленной к правому борту осью, закрепляют в этом согласованном положении ДУС на объекте. В рабочем режиме измеряют в гироплатформе (ГП) углы рыскания, тангажа, крена и угол поворота рамы тангажа относительно рамы внутреннего крена, снимают показания с ДУС по двум его каналам и направляют их в вычислитель ИНС. В вычислителе ИНС формируют модели скоростей дрейфов стабилизированной площадки ГП, углы ухода ГП в горизонте и азимуте, модели углов рыскания, тангажа, крена объекта с учётом перекрёстных влияний каналов ГП, модели скоростей изменения углов рыскания, тангажа, крена объекта, модели скоростей дрейфов каналов ДУС. При этом в курсовом канале системы вырабатывают модельный угол истинного курса объекта, используя значения углов рыскания, тангажа и модельных значений уходов стабилизированной площадки, вырабатывают модельное значение истинного курса объекта на основе показаний ДУС и модельных значений углов ориентации объекта, их скоростей изменения, а также модельные значения скоростей дрейфа ДУС, вырабатываемых системой значений широты, долготы, скоростей их изменения, задаваемых значений масштабных коэффициентов каналов ДУС, значения угловой скорости Земли. Затем находят разность модельных значений углов истинного курса, полученных курсовым каналом системы и с помощью ДУС, которые направляют на вход оптимального фильтра, на выходе которого получают оценку погрешности выработки угла истинного курса курсовым каналом системы, которую вычитают в сумматоре из модельного значения истинного курса, выработанного в курсовом канале системы, и получают оптимальный угол истинного курса объекта, используемый совместно с модельными значениями углов тангажа и крена как выходные углы ориентации объекта, выработанные ИНС, скомплексированной с ДУС, при этом модельные курсовые углы курсового канала системы и ДУС, оптимальный курсовой угол, модельные значения углов ориентации объекта определяют с помощью полученных аналитических выражений. Техническим результатом осуществления заявленного изобретения является обеспечение возможности учёта перекрёстного влияния каналов ГП при выработке ИНС углов истинного курса, тангажа, крена, а также автономной коррекции показаний курсового канала ИНС в результате его комплексирования с двухканальным ДУС. 7 ил.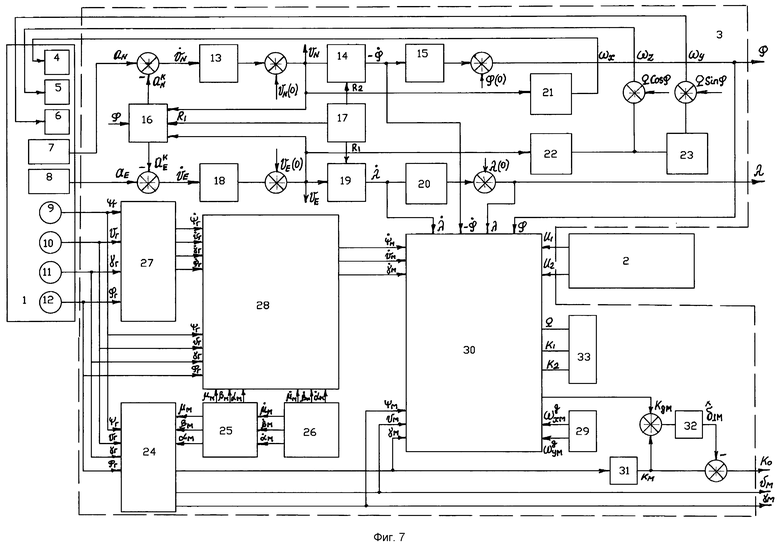
Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы, включающий предварительное согласование измерительных осей инерциальной навигационной системы и объекта, проведение начальной выставки гироплатформы путем выполнения сперва приближенной выставки поворотами рам карданового подвеса до нулевого положения датчиков углов рам, затем выполнение точного горизонтирования с использованием акселерометров до установки стабилизированной площадки с гироскопами и акселерометрами в точное горизонтальное положение, после чего проведение гирокомпасирования, при котором стабилизированную площадку удерживают в плоскости горизонта и, используя северный акселерометр, заставляют прецессировать курсовой гироскоп и поворачивать стабилизированную площадку до совпадения ее горизонтальных осей, связанных с осями чувствительности горизонтальных акселерометров, с направлениями на север и восток, а в рабочем режиме производят определение угла рыскания ψг объекта с датчика угла поворота рамы внутреннего крена относительно стабилизированной площадки, угла тангажа ϑг с датчика поворота дополнительной рамы относительно рамы тангажа, угла крена γг с датчика угла поворота объекта относительно дополнительной рамы, угла ϕг поворота рамы тангажа относительно рамы внутреннего крена, а также вырабатывают углы широты ϕ, долготы λ местоположения объекта и скорости изменения этих углов  отличающийся тем, что предварительно выполняют подготовительные работы по комплексированию курсового канала инерциальной навигационной системы с двухканальным датчиком угловой скорости, для чего в вычислитель системы устанавливают программное обеспечение оптимального фильтра, оценивающего ошибку определения истинного курса курсовым каналом инерциальной навигационной системы, и программное обеспечение формирования моделей скоростей дрейфов стабилизированной площадки по курсу
отличающийся тем, что предварительно выполняют подготовительные работы по комплексированию курсового канала инерциальной навигационной системы с двухканальным датчиком угловой скорости, для чего в вычислитель системы устанавливают программное обеспечение оптимального фильтра, оценивающего ошибку определения истинного курса курсовым каналом инерциальной навигационной системы, и программное обеспечение формирования моделей скоростей дрейфов стабилизированной площадки по курсу  тангажу
тангажу  крену
крену  углов ее ухода по курсу μм, тангажу βм, крену αм, а также моделей скоростей дрейфов
углов ее ухода по курсу μм, тангажу βм, крену αм, а также моделей скоростей дрейфов  по двум каналам датчика угловой скорости, располагают датчик угловой скорости с двумя осями чувствительности на корпусе объекта, связывают его с инерциальной навигационной системой линиями электропитания и информации, выполняют фазировку сигналов измерительных каналов датчика угловой скорости с направлением азимутального поворота объекта, согласовывают оси чувствительности датчика с продольной осью объекта и осью, направленной к правому борту, закрепляют в этом согласованном положении датчик угловой скорости на объекте, вводят в вычислитель системы значения масштабных коэффициентов его каналов К1, К2, а в рабочем режиме измеряют углы рыскания ψг, тангажа ϑг, крена γг, угла поворота ϕг рамы тангажа относительно рамы внутреннего крена, снимают показания U1, U2 с датчика угловой скорости по двум каналам и направляют их в вычислитель инерциальной навигационной системы, в котором формируют модели скоростей дрейфов
по двум каналам датчика угловой скорости, располагают датчик угловой скорости с двумя осями чувствительности на корпусе объекта, связывают его с инерциальной навигационной системой линиями электропитания и информации, выполняют фазировку сигналов измерительных каналов датчика угловой скорости с направлением азимутального поворота объекта, согласовывают оси чувствительности датчика с продольной осью объекта и осью, направленной к правому борту, закрепляют в этом согласованном положении датчик угловой скорости на объекте, вводят в вычислитель системы значения масштабных коэффициентов его каналов К1, К2, а в рабочем режиме измеряют углы рыскания ψг, тангажа ϑг, крена γг, угла поворота ϕг рамы тангажа относительно рамы внутреннего крена, снимают показания U1, U2 с датчика угловой скорости по двум каналам и направляют их в вычислитель инерциальной навигационной системы, в котором формируют модели скоростей дрейфов  стабилизированной площадки гироплатформы, углы ее ухода в горизонте βм, αм и в азимуте μм, модели углов рыскания ψм, тангажа ϑм, крена γм объекта, учитывающие уходы стабилизированной площадки и перекрестное влияние каналов гироплатформы, модели скоростей изменения углов рыскания
стабилизированной площадки гироплатформы, углы ее ухода в горизонте βм, αм и в азимуте μм, модели углов рыскания ψм, тангажа ϑм, крена γм объекта, учитывающие уходы стабилизированной площадки и перекрестное влияние каналов гироплатформы, модели скоростей изменения углов рыскания  тангажа
тангажа  крена
крена  модели скоростей дрейфов
модели скоростей дрейфов  датчика угловой скорости по двум каналам, после этого вырабатывают модельный угол истинного курса Км курсового канала системы, используя значения углов рыскания ψг, тангажа ϑг, и модельные значения углов ухода μм, βм, αм стабилизированной площадки, вырабатывают модельное значение угла истинного курса Кдм на основе показаний датчика угловой скорости U1, U2, используя модельные значения углов ориентации ψм, ϑм, γм, скоростей их изменения
датчика угловой скорости по двум каналам, после этого вырабатывают модельный угол истинного курса Км курсового канала системы, используя значения углов рыскания ψг, тангажа ϑг, и модельные значения углов ухода μм, βм, αм стабилизированной площадки, вырабатывают модельное значение угла истинного курса Кдм на основе показаний датчика угловой скорости U1, U2, используя модельные значения углов ориентации ψм, ϑм, γм, скоростей их изменения  модельные значения скоростей дрейфа
модельные значения скоростей дрейфа  датчика угловой скорости, а также выработанных системой значений широты ϕ, долготы λ, скоростей их изменения
датчика угловой скорости, а также выработанных системой значений широты ϕ, долготы λ, скоростей их изменения  и задаваемых значений масштабных коэффициентов К1, К2, угловой скорости Земли Ω, затем находят разность модельных значений углов истинного курса Км и Кдм, которую направляют на вход оптимального фильтра, с помощью которого получают оценку
и задаваемых значений масштабных коэффициентов К1, К2, угловой скорости Земли Ω, затем находят разность модельных значений углов истинного курса Км и Кдм, которую направляют на вход оптимального фильтра, с помощью которого получают оценку  погрешности выработки угла истинного курса Км, которую вычитают в сумматоре из модельного значения Км, выработанного в курсовом канале системы, и получают оптимальный угол Ко истинного курса объекта, который совместно с модельными значениями углов ϑм и γм используют как выходные углы ориентации объекта, выработанные инерциальной навигационной системой, при этом модельные курсовые углы Км, Кдм, оптимальный курсовой угол Ко, модельные значения углов ориентации объекта ψм, ϑм, γм и их скоростей изменения
погрешности выработки угла истинного курса Км, которую вычитают в сумматоре из модельного значения Км, выработанного в курсовом канале системы, и получают оптимальный угол Ко истинного курса объекта, который совместно с модельными значениями углов ϑм и γм используют как выходные углы ориентации объекта, выработанные инерциальной навигационной системой, при этом модельные курсовые углы Км, Кдм, оптимальный курсовой угол Ко, модельные значения углов ориентации объекта ψм, ϑм, γм и их скоростей изменения  определяют с помощью следующих формул
определяют с помощью следующих формул











| Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы | 2020 |
|
RU2741501C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| СПОСОБ КОМПЕНСАЦИИ ИНСТРУМЕНТАЛЬНЫХ ПОГРЕШНОСТЕЙ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2362977C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ И КОМБИНИРОВАННОЙ КОМПЕНСАЦИИ ЕГО ДРЕЙФА | 2001 |
|
RU2189564C1 |
| Упругая связь вибрационного конвейера | 1985 |
|
SU1305091A1 |
| FR 3003639 A1, 26.09.2014 | |||
| DE 602005027773 D1, 16.06.2011. | |||

