Изобретение относится к области авиационного приборного оборудования и предназначено для формирования в рабочем пространстве летчика, пилотирующего самолет, оповещений о приближении к конечной точке маршрута в форме текстовых, образных или звуковых сигналов
По мере расширения области полетов коммерческой авиации и интенсификации воздушных перевозок вопрос безопасности эксплуатации авиационной техники становятся все более острым. Повышенное внимание в последнее время уделяется безопасности операций на взлетно-посадочной полосе (runway safety).
По этому направлению созданы в структуре ИКАО международные комиссии с участием отечественных специалистов. Деятельность международных отделений освещается на специальном сайте www.icao.int/RunwaySafety.
Особую роль в вопросах безопасности авиационных перевозок играет «человеческий фактор». Статистика авиационных происшествий (АП) по материалам как зарубежных [1, 2], так и отечественных [3-5] исследований показывает устойчиво высокую долю АП, обусловленных участием человека в процессе выполнения полетного задания. Эта доля колеблется в зависимости от методик оценки от 50 до 70%. При этом на этапы взлета и посадки, как и во все предыдущие годы, приходится более половины АП [6].
Анализ состояния отечественного парка воздушных судов (ВС) [7] показывает, что по мере совершенствования техники доля авиационных происшествий, связанных с недостатками систем ВС и их характеристик, уменьшалась с 40% до 15%, а доля происшествий, обусловленных отклонениями в работе экипажа росла с 50% до 80%.
Наземные участки траектории движения ВС выполняются под контролем или при непосредственном участии пилота в управлении. Ввиду высоких психологических нагрузок на пилота повышается вероятность ошибочных или несвоевременных действий. Возникновение непредвиденных или нештатных ситуаций при ограничении на время реакции может провоцировать стрессовые состояния пилота. Известны множество факторов, осложняющих полет ВС на заключительном участке траектории. Среди них выделяются такие как:
1. Нарушения/отклонения, допускаемые экипажами ВС:
- нестабилизируемые заходы на посадку;
- нарушения взаимодействия в экипаже;
- двойное управление на ВС типа А-320 или Суперджет;
- ошибки пилотирования вследствие плохих метеоусловий (ветер, низкая облачность, плохая видимость);
- перелеты при посадке;
- перегрузка при посадке;
- повышенная скорость на глиссаде;
- неприменение реверса и интерцепторов;
- потеря ситуативной осведомленности экипажем.
2. Влияние внешних активных возмущений:
- загрязнение покрытия ВПП (наличие воды, снега, льда, слякоти и др.);
- попутный или боковой ветер;
- столкновения ВС с птицами и животными.
3. Повреждения ВС на земле:
- попадания в двигатель посторонних предметов при взлете и посадке ВС;
- внезапное загромождение ВПП посторонними объектами или ее повреждение;
- отказы оборудования, организованные угрозы, нештатные или вынужденные маневры и др.;
- неисправность тормозной системы;
- разрушение пневматиков и др.
При таком разнообразии возмущающих факторов и при возникновении нештатных режимов движения крайне необходимо улучшение информационной поддержки пилота и создание дружественной аудио-визуальной среды взаимодействия пилота с приборным оборудованием кабины. С этими целями нами были предложены методы и алгоритмы прогнозирования движения ВС на наземных участках траектории, основанные на энергетическом подходе к управлению пространственным движением летательных аппаратов (ЛА) [8-11].
Известна Система поддержки принятия решений экипажа воздушного судна по предотвращению особых ситуаций при выходе из эксплуатационной области и ее работа (RU 2386569 С2, 20.04.2010), основанная на обработке всей доступной информации о внешней среде и моделировании движения ВС.
Недостатком указанной системы и способа является отсутствие динамического прогноза развития ситуации на завершающем участке траектории, учитывающего все действующие непредвиденные возмущения и изменения аэродинамической конфигурации.
Техническим результатом способа формирования сигнала оповещения пилота о дистанции торможения самолета является вычисление (расчет, нахождение, определение) прогнозного положения самолета на впередилежащей траектории, за счет чего повышается информированность пилота в условиях атмосферных возмущений сложной структуры, сокращается время для оценки ситуации, освобождается резерв внимания, снижается вероятность ошибочных действий экипажа самолета и улучшается качество ручного пилотирования.
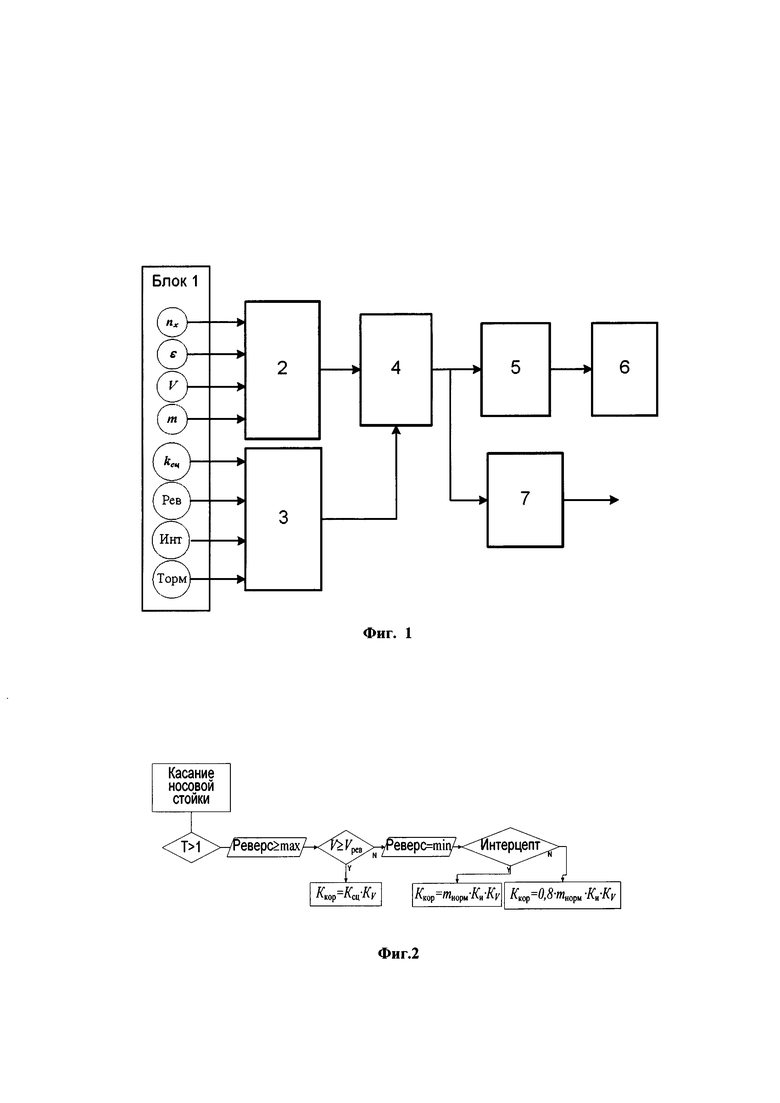
Указанный технический результат способа формирования сигнала оповещения пилота о дистанции торможения самолета достигается тем, что измеряют текущие координаты и параметры движения - дальность, высоту, скорость, вводит эти параметры через блок связи с бортовым оборудованием в вычислительное устройство, распределяют введенные данные по блокам вычислительного устройства, определяют прогнозное значение дальности до финальной точки траектории, корректирует это значение, и выдает сигнал на электронный дисплей командного пилотажного прибора в поле зрения пилота, при этом на входной блок 1 поступают все необходимые сигналы от датчиков на объекте, с его выхода часть переменных подается на блок 2, в котором вычисляется прогнозное значение дальности до точки останова, другая часть переменных поступает на блок 3, в котором вычисляется коэффициент коррекции, который передается в блок 4, на выходе которого образуется скорректированная величина дальности до точки останова, которая в блоке 5 формирует сигнал оповещения пилота для передачи его на экран командного пилотажного индикатора 6, кроме того, скорректированная величина дальности с блока 4 передается на блок 7 вычисления резерва качения до обреза взлетно-посадочной полосы, что улучшает информационную поддержку экипажа и снижает вероятность авиационных происшествий.
Техническим результатом устройства является формирование на экране пилотажного прибора величины дальности до достижения конечной точки маршрута в форме текстовых или графических сообщений, что расширяет информационные возможности бортового оборудовании самолетов гражданской авиации, позволит повысить ситуационную осведомленность пилота в условиях атмосферных возмущений сложной структуры, тем самым снизить стрессовые нагрузки в критических ситуациях и в итоге уменьшить вероятность летных происшествий.
Технический результат устройства достигается тем, что содержит блок 1 связи с бортовым измерительным оборудованием, блок 2 вычисления прогнозной дальности до финальной точки траектории, блок 3 вычисления коэффициента коррекции при разных конфигурациях тормозных и положениях устройств, блок 4 вычисления скорректированной дальности до финальной точки, блок 5 вывода результатов прогнозирования дальности на экран командного пилотажного прибора, блок 6 в виде индикатора продольного движения воздушного судна по взлетно-посадочной полосе с оцифровкой основных координат, блок 7 вычисления резерва качения воздушного судна до обреза взлетно-посадочной полосы, при этом выходы блока 1 соединены с входами блока 2 и блока 3, выходы блока 2 и блока 3 поступают на входы блока 4, выходы которого подаются на блок 5 и блок 7, выход блока 5 подается на электронный индикатор движения 6, а выход блока 7 подается на экран командного пилотажного прибора.
На фиг. 1 представлена структура прогноза.
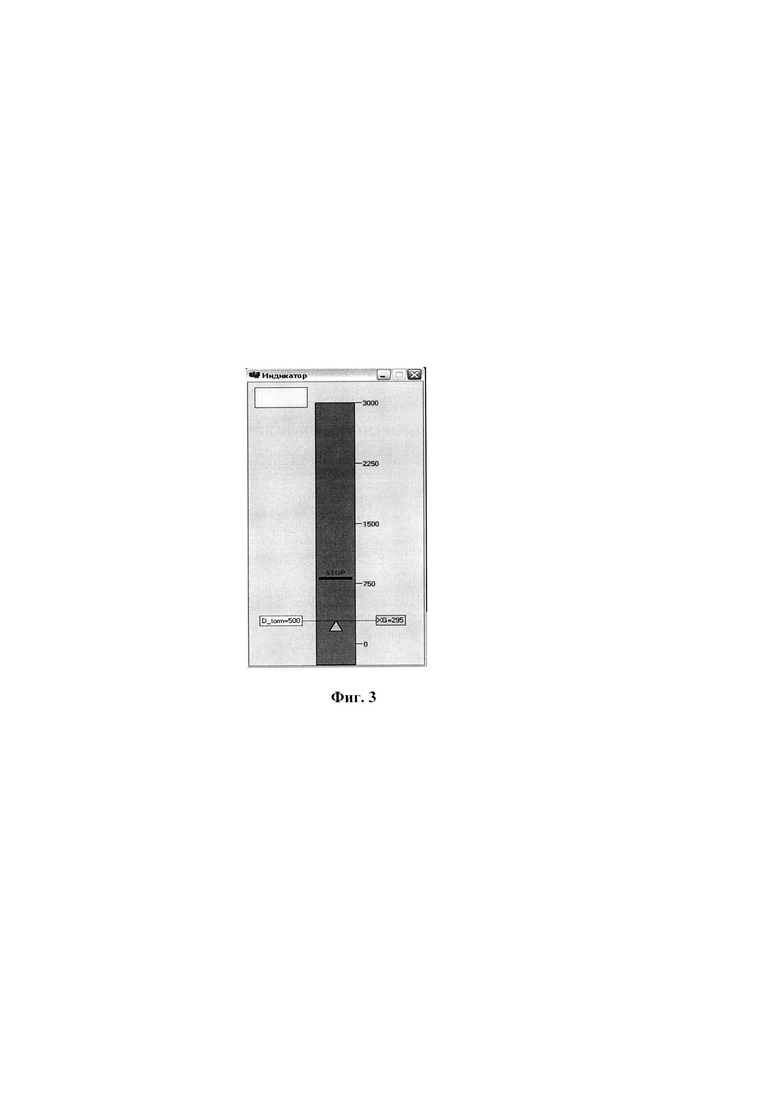
На фиг. 2 - логика коррекции.
На фиг. 3 - индикатор режима торможения.
Устройство формирования сигнала оповещения пилота о дистанции торможения самолета содержит блок 1 связи с бортовым измерительным оборудованием, блок 2 вычисления прогнозной дальности до финальной точки траектории, блок 3 вычисления коэффициента коррекции при разных конфигурациях тормозных и положениях устройств, блок 4 вычисления скорректированной дальности до финальной точки, блок 5 вывода результатов прогнозирования дальности на экран КПП, блок 6 в виде индикатора продольного движения ВС по ВПП с оцифровкой основных координат, блок 7 вычисления резерва качения ВС до обреза ВПП, при этом выходы блока 1 соединены с входами блока 2 и блока 3, выходы блока 2 и блока 3 поступают на входы блока 4, выходы которого подаются на блок 5 и блок 7, выход блока 5 подается на электронный индикатор движения 6, а выход блока 7 подается на экран КПП (Фиг. 1).
Методологической базой разработки способа прогнозирования является энергетический подход к управлению пространственным движением летательных аппаратов.
Алгоритмы управления, основанные на полной энергии самолета, впервые были опубликованы в работе [12]. Сформулированный там энергетический подход к управлению движением в пространстве основан на описании движения объекта как в пространстве переменных состояния, так и в терминах его полной энергии и ее составляющих. В результате совместного решения динамических уравнений переносного движения в возмущенной атмосфере и уравнения полной энергии объекта было получено уравнение баланса энергий в системе объектов: «летательный аппарат - силовая установка - внешняя среда» [13].

Это уравнение устанавливает количественные соотношения между источником энергии и всеми ее потребителями. Уравнение записано в форме приращений удельной энергии движения:

Единицей измерения удельной энергии является метр, поэтому она называется также энергетической высотой. Уравнение содержит члены: ΔНЕ - приращение энергетической высоты,  - удельная работа двигателя,
- удельная работа двигателя,  - затраты энергии на преодоление силы лобового сопротивления,
- затраты энергии на преодоление силы лобового сопротивления,  - работа ветра. Для каждого члена уравнения баланса энергий в [9, 13] получены интегральные выражения.
- работа ветра. Для каждого члена уравнения баланса энергий в [9, 13] получены интегральные выражения.
Однако на режимах движения по ВПП возникают силы сопротивления со стороны опор шасси. Поэтому уравнение баланса энергий должно быть обобщено на наземные режимы путем добавления члена  , отражающего процесс поглощения энергии на преодоление механических сил торможения.
, отражающего процесс поглощения энергии на преодоление механических сил торможения.

Новый член представлен нами в форме:

где kторм - обобщенный нормированный коэффициент торможения, равный отношению суммарной силы сопротивления со стороны шасси к весу самолета. В свою очередь сила сопротивления зависит от коэффициента сцепления колес с покрытием ВПП и степени обжатия тормозных колодок колес. При полном обжатии коэффициент торможения равен коэффициенту сцепления.
Полная энергия движения на текущий момент равна

Прогнозная величина энергии в процессе движения определяется работой внешних сил на траектории S:

В число внешних сил Fi входят: тяга двигателя (Р), в том числе реверсивная, аэродинамические силы (D), соответствующие текущей конфигурации, и силы торможения со стороны шасси (Fторм). Последние зависят от коэффициента сцепления колес с покрытием, выпуска тормозных щитков и парашютов, а также от энергоемкости тормозной системы. Прогнозную длину тормозного пути определим как расстояние, на котором скорость движения будет погашена от текущей до некоторой малой величины ε, например, до скорости рулежки:

Моделирование или прямое измерение всех действующих сил является нетривиальной задачей. Реакцией равнодействующей этих сил является приобретаемое ускорение. В предлагаемой методике сумма действующих сил естественным образом вычисляется через продольное ускорение a(t)
которое на борту обычно определяется по измеряемой перегрузке nx(t)
Выбрав критерий останова V(t)≤ε, где ε - близкая к нулю малая величина, была найдена прогнозная длина тормозного пути:

По вычисленной оценке предельной дальности останова самолета, в поле зрения пилота может быть сгенерировано сообщение о резерве дистанции безопасного торможения:

Такое сообщение, безусловно, полезно для принятия пилотом решения об экстренном торможении или в случае невозможности - об уходе на второй круг.
Процесс торможения является одним из самых динамичных и напряженных (ответственных) этапов полета. Поэтому все действия экипажа и режимы автоматических систем торможения жестко регламентированы руководствами по летной эксплуатации. Это позволяет достаточно правдоподобно предсказать развитие процесса торможения, соблюдая все предписанные регламентом манипуляции. Основные события на этапе торможения происходят в последовательности: касание основных стоек шасси, опускание носовой стойки, выпуск интерцепторов, включение и выключение реверса тяги, уборка интерцепторов, обжатие тормозных колодок колес.
В процессе движения все силы меняются в соответствии с изменением скоростного режима или по какой-либо программе (в соответствии с наставлениями и инструкциями РЛЭ), или в связи с непредвиденными обстоятельствами такими, как изменение состояния покрытия ВПП, отказы двигателя или тормозной системы и др. Кроме того, ветер и осадки могут изменить предполагаемые или расчетные условия на ВПП. Поэтому прогноз не может совпадать с реальным процессом и всегда содержит погрешность или неопределенность
Для повышения достоверности прогноза необходима коррекция алгоритмов прогнозирования. Повышение достоверности прогноза достигается введением в алгоритм прогнозирования коэффициента коррекции (Qкор) результатов прогнозирования, полученных по текущим параметрам движения воздушного судна.
Корректированная длина тормозного пути находится в виде

При этом Qкор является функцией трех переменных
где Ji - признак режимов, kторм - коэффициент торможения шасси, V - скорость качения.
Идентификаторами режимов являются логические переменные:
 включение максимального реверса и
включение максимального реверса и
 выпуск интерцепторов,
выпуск интерцепторов,
Коэффициент коррекции также различается по режимам
Поскольку коэффициент торможения kторм в наибольшей степени зависит от коэффициента сцепления kсц, который и сообщается на борт для расчета посадки, то коэффициент коррекции на участке максимального реверса Qрев в явном виде учитывал именно эти факторы
На участке пробега с выпущенными интерцепторами коррекция достигается простым масштабированием оптимальных коэффициентов по массе, нормированной средней посадочной массой mнорм.=m/mсред.
Логическая структура корректирующих цепей в алгоритме прогнозирования показана на (Фиг. 2).
Сообщения пилоту формируются в визуальном формате. На фиг. 3 показан вид экранного индикатора движения ВС на заключительном этапе посадки, на режиме торможения. На индикаторе указаны основные факторы режима: изображение ВПП с оцифровкой от точки старта, символ ВС, метка «Стоп» прогнозного положения точки останова, дальность до точки останова (D_torm), текущее положение ВС от точки старта (XG) и окно отображения времени торможения.
Разработан Способ прогнозирования дистанции торможения на основе энергетического подхода к управлению. Предложен способ коррекции результатов прогноза. Разработан компьютерный исследовательский стенд для испытания алгоритмов прогнозирования.
Проведенные статистические испытания алгоритма прогнозирования показали его высокую достоверность и правдоподобие.
Список литературы
1. Rallo N. The European Regional Aviation Safety Group (RASG-EUR). // FSFI International Workshop, 15 May 2012.
2. Rallo N. Runway safety: the big picture // ICAO Regional Runway Safety Seminar (RRSS). Moscow, 6-8 November 2012.
3. Sharov V. Development of Overrun Prognosis System in Volga-Dnepr Airline. // ICAO Regional Runway Safety Seminar (RRSS). Moscow, 6-8 November 2012.
4. Jarinov S. Role of the Regulator. // ICAO_Regional Runway Safety Seminar (RRSS). Moscow, 6-8 November 2012.
5. Шаров В.Д. Методика оценки вероятности выкатывания воздушных судов за пределы ВПП при посадке. // Научный вестник МГТУ Гражданской Авиации, №122, 2007.
6. Statistical Summary of Commercial Jet Airplane Accidents. Worldwide Operations 1959 - 2019. Boeing. December 2020 http://www.boeinz.com/news/techissues/pdf/statsum.pdf.
7. Кофман В.Д., Полтавец B.A., Теймуразов P.А. Сравнительный анализ безопасности полетов отечественных и зарубежных самолетов. // Транспортная безопасность и технологии. №4(5), декабрь 2005.
8. Борисов В.Т., Павлов Б.В., Шевченко A.M. Средства информационной поддержки пилота в нештатных ситуациях // Матер. 7-й науч.-техн. конф. «Мехатроника, автоматизация, управление». СПб. ОАО «Концерн «ЦНИИ Электроприбор», 2010. С. 74-77.
9. Шевченко A.M., Павлов Б.В., Начинкина Т.Н. Метод прогнозирования взлета самолета при наличии высотных препятствий // Изв. Южного федерального ун-та. Техн. науки. 2012. №3. с. 167-172. Таганрог: Изд-во ТТИ ЮФУ.
10. Shevchenko A.M. Some Means for Informational Support of Airliner Pilot // 5th Int. Scientific Conf. on Physics and Control (Physcon 2011). Leon, Spain. Sept. 5-8, 2011. P. 1-5 httv://lib.phvscon.ru/doc?id=78f90e41e746/.
11. A.Kuznetsov, A.Shevchenko, Ju. Solonnikov. The Methods of Forecasting Some Events During the Aircraft Takeoff and Landing, // 19th IF AC Symposium on Automatic Control in Aerospace (ACA2013).Germany. 2013. Proceedings, pp. 183-187.
12. Kurdjukov A.P., Nachinkina G.N., Shevchenko A.M. Energy approach to flight control. / AIAA Conf. Navigation, Guidance & Control. AAIA Paper 98-4211. Boston, 1998.
13. Павлов Б.В., Шевченко A.M., Начинкина Г.Н. Энергетический подход и его использование для проектирования систем управления полетом. // Актуальные проблемы авиационных и аэрокосмических с-м, вып. 2 (16), том 8. 2003. С. 24-43.
Группа изобретений относится к способу и устройству формирования сигнала оповещения пилота о дистанции торможения воздушного судна. Для формирования сигнала оповещения измеряют текущие координаты и параметры движения - дальность, высоту, скорость, вводят эти параметры через блок связи с бортовым оборудованием в вычислительное устройство, распределяют введенные данные по блокам вычислительного устройства, определяют прогнозное значение дальности до финальной точки траектории, корректирует это значение и выдает сигнал на электронный дисплей командного пилотажного прибора в поле зрения пилота. Устройство содержит блок связи с бортовым измерительным оборудованием, блок вычисления прогнозной дальности до финальной точки траектории, блок вычисления коэффициента коррекции при разных конфигурациях тормозных и положениях устройств, блок вычисления скорректированной дальности до финальной точки, блок вывода результатов прогнозирования дальности на экран командного пилотажного прибора, блок в виде индикатора продольного движения воздушного судна по взлетно-посадочной полосе с оцифровкой основных координат, блок вычисления резерва качения воздушного судна до обреза взлетно-посадочной полосы, соединенные определенным образом. Обеспечивается повышение безопасности посадки воздушного судна за счет увеличения информированности пилота. 2 н.п. ф-лы, 3 ил.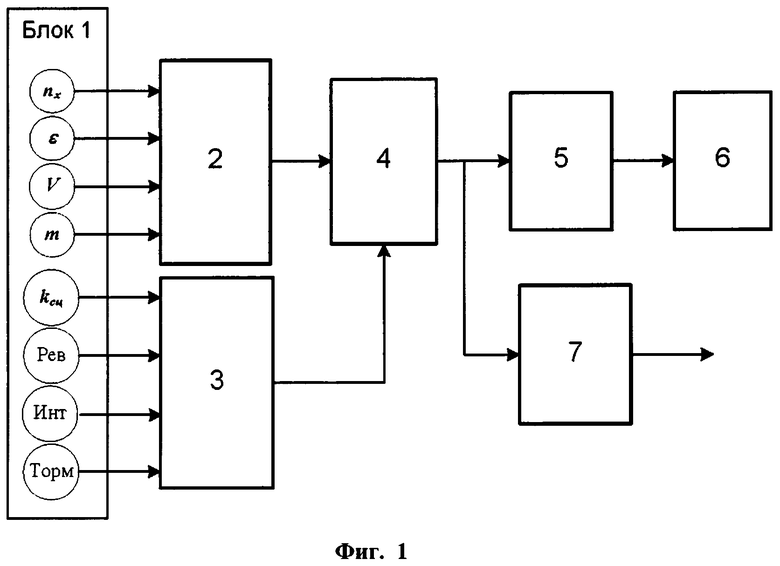
1. Способ формирования сигнала оповещения пилота о дистанции торможения воздушного судна, характеризующийся тем, что измеряют текущие координаты и параметры движения - дальность, высоту, скорость, вводят эти параметры через блок связи с бортовым оборудованием в вычислительное устройство, распределяют введенные данные по блокам вычислительного устройства, определяют прогнозное значение дальности до финальной точки траектории, корректируют это значение и выдают сигнал на электронный дисплей командного пилотажного прибора в поле зрения пилота, при этом на входной блок (1) поступают все необходимые сигналы от датчиков на объекте, с его выхода часть переменных подается на блок (2), в котором вычисляется прогнозное значение дальности до точки останова, другая часть переменных поступает на блок (3), в котором вычисляется коэффициент коррекции, который передается в блок (4), на выходе которого образуется скорректированная величина дальности до точки останова, которая в блоке (5) формирует сигнал оповещения пилота для передачи его на экран командного пилотажного индикатора (6), кроме того, скорректированная величина дальности с блока (4) передается на блок (7) вычисления резерва качения до обреза взлетно-посадочной полосы, что улучшает информационную поддержку экипажа и снижает вероятность авиационных происшествий.
2. Устройство формирования сигнала оповещения пилота о дистанции торможения воздушного судна, характеризующееся тем, что содержит блок (1) связи с бортовым измерительным оборудованием, блок (2) вычисления прогнозной дальности до финальной точки траектории, блок (3) вычисления коэффициента коррекции при разных конфигурациях тормозных и положениях устройств, блок (4) вычисления скорректированной дальности до финальной точки, блок (5) вывода результатов прогнозирования дальности на экран командного пилотажного прибора, блок (6) в виде индикатора продольного движения воздушного судна по взлетно-посадочной полосе с оцифровкой основных координат, блок (7) вычисления резерва качения воздушного судна до обреза взлетно-посадочной полосы, при этом выходы блока (1) соединены с входами блока (2) и блока (3), выходы блока (2) и блока (3) поступают на входы блока (4), выходы которого подаются на блок (5) и блок (7), выход блока (5) подается на электронный индикатор движения (6), а выход блока (7) подается на экран командного пилотажного прибора.
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| СПОСОБ ОПОВЕЩЕНИЯ О РАСПОЛОЖЕНИИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ВЗЛЕТНО-ПОСАДОЧНЫХ ПОЛОС ПРИ ЗАХОДЕ НА ПОСАДКУ И ПРИ ДВИЖЕНИИ ПОСЛЕ ПРИЗЕМЛЕНИЯ | 2011 |
|
RU2465652C1 |
| ЭЛЕКТРОННАЯ СИСТЕМА ДЛЯ ЗАЩИТЫ ЛЕТАТЕЛЬНОГО АППАРАТА ОТ ВЫХОДА ЗА ГРАНИЦЫ ОБЛАСТИ ДОПУСТИМЫХ РЕЖИМОВ ПОЛЕТА (ВАРИАНТЫ) И ЛЕТАТЕЛЬНЫЙ АППАРАТ (ВАРИАНТЫ) | 2018 |
|
RU2752153C2 |
| US 10518897 B2, 31.12.2019 | |||
| US 20160272344 A1, 22.09.2016. | |||

