Изобретение относится к испытательной технике и может быть использовано, когда испытуемому объекту в пространстве необходимо сообщить многокоординатный вибрационный процесс, характеризующийся произвольным набором линейных и угловых обобщённых координат.
Целью изобретения является повышение достоверности лабораторных испытаний объектов на вибронадежность, достигаемое вследствие повышения точности воспроизведения пространственных вибраций да счет учёта влияния коэффициентов поперечного преобразования.
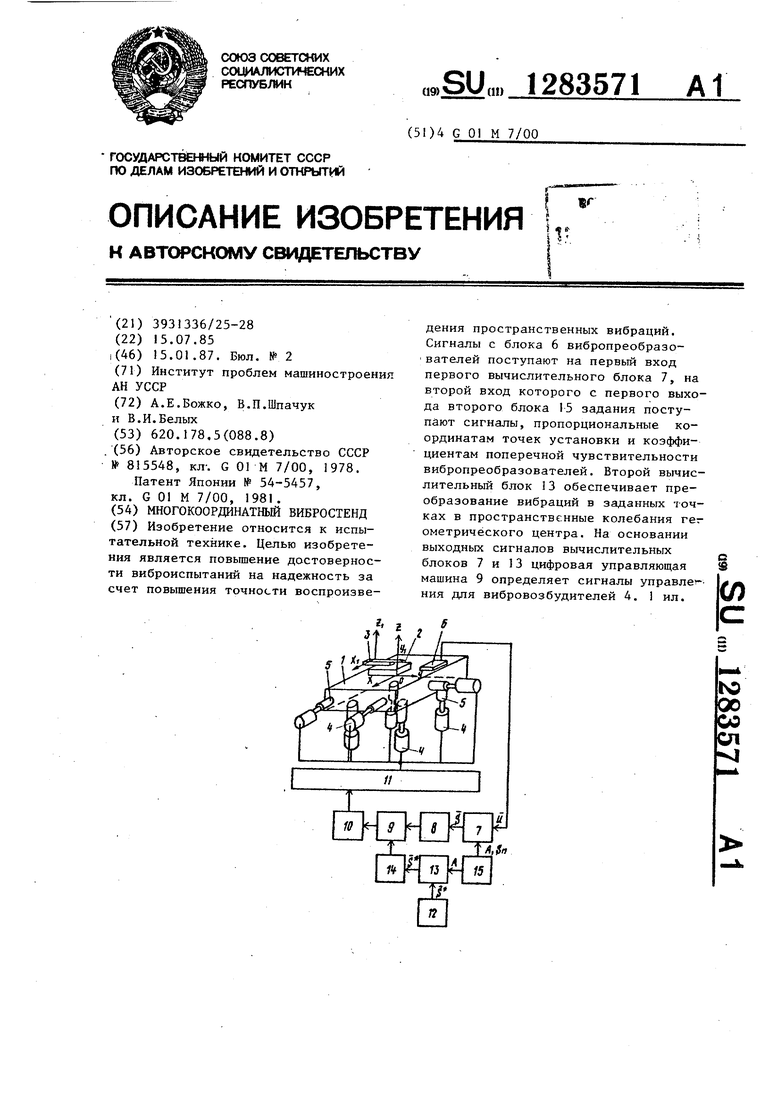
На чертеже представлена блок-схема вибростенда.
На чертеже приняты следующие обозначения: Oxyz - система коорди- .нат, связанная с геометрическим центром поверхности платформы; 0,x,y,z, - система координат, связанная с точкой приспособления (испытуемого объекта), заданной методикой на проведение испытаний.
Многокоординатный вибростенд содержит платформу 1, предназначенную для установки с помощью держателя 2 . испытуемого объекта 3, вибровозбудители 4, соединительные узлы 5, выполненные в виде подвижных штанг, сипь- фонов и пружин, связьшашщих вибровозбудители 4 с платформой 1, последовательно соединенные блок 6 вибропреобразователей, связанный с платформой 1, первый вычислительный блок 7, первый аналого-цифровой преобразователь 8, цифровую управляющую ма- щину 9, цифроаналоговый преобразователь 10 и блок II формирования управляющих сигналов, выходы которого соединены входами вибровозбудителей 4, последовательно соединенные первый блок 12 задания, второй вычисли- тельньй блок 13 и второй аналого-цифровой преобразователь 14, выход которого соединен с вторым входом цифровой управляющей машины 9, и второй блок 15 задания, первьдй и второй выходы которого соединены с вторыми входами соответствующих вычислительных блоков 7 и 13.
(испыВибростенд работает следующим об- « т.уемого объекд-а З) , при этом одноразом.
Первый блок 12 задания, вьтолнен- ный, например, на базе магнитографа, формирует сигналы, соответствую83571 . 2
щие эксплуатационным вибрациям в К-ой точке приспособления для держателя 2 либо испытуемого объекта 3, заданной методикой на проведение лабораторных испытаний сигналы описываются вектором, например, виброускорения
,
где xf у Z (, - линейные и угловые ускорения в заданной К-ой точке.
Сигналы поступают на первый вход второго вычислительного блока 13, на второй вход которого одновременно с второго блока 15 задания поступает сигнал, соответствующий коорди10
fS
0
5
0
натам (х, у, z) заданной точки приспособления (испытуемого объекта) относительно геометрического центра поверхности платформы стенда (корди- наты полюса О, в системе координат Oxyz).,
Второй вычислительный блок 13 ,
обеспечивает преобразование вибраций в заданной точке держателя 2 либо - испытуемого объекта 3 (вектор S,) в пространственные колебания геометрического центра поверхности платформы стенда-(вектор , у ,
« U /i к
где X
Q
- линейные и угловые ускорения геометрического центра - полюса О поверхности платформы). Для угловых ускорений вектора S вьтрлняются равенства
V V , 9 9t ,4 cft , так ; как держатель 2 (испытуемый объект 3) жестко связан с платформой.
ускорений векРасчет линейных :; тора S осуществляется по выра1жению
5
if У
Z
е
Ук-ХкО ZK-M-K
о-Zo
О х.
(1)
Применение второго вычислительного блока 13 и второго блока 15 задания позволяет, таким обра:зом, вос- .jg производить На платформе стенда пространственные колебания (вектор S ),
соответствующие пространственным колебаниям (вектор S.,), заданным
любой К-ой точке держателя 2
в
(испыт.уемого объекд-а З) , при этом одновременно исключается влияние геометрических и весовых параметров держателя 2 и объекта 3 при их опытно- конструкторской доводке на действую3 128357 щие на объект внбронагрузки, так как координаты полюса 0 опреде- ляются конкретно для каждого типа (схемного исполнения) приспособле- . ния или испытуемого объекта. .5
С выхода второго вычислителъного блока 13 сигнал через второй анало- гово-цифровой преобразователь 14 поступает на второй вход цифровой управляющей машины 9, которая выраба- О тывает управляющие сигналы и через цифро-аналоговый преобразователь IО подает их на блок II формирования сигналов управления.
Вибровозбудители 4 через соеди- -5 нительные узлы 5 передают вибрационное воздействий на платформу 1, где размещены держатель 2 с испытуемым объектом 3 и блок 6 вибропреобразо- ватёлей. Количество и места установ- 20 ки вибропреобразователей блока 6 определяются в соответствии с необходимыми условиями испытаний. Выходные сигналы , U,,; , Uj,. -ого вибвительности кот рых ориентирован в направлении ос Ох, Оу и Oz соо „ ветственно:// II I/ « П ,
x,y,z, Cf , а , cf - текущие воспрои водимые линейны и угловые ускоре геометрического центра поверхнос платформы 1; X, У; Z; - координаты точек
установки i-ro в ропреобразовател в системе коорди 6xyz
SQ. , - основная и попер ная чувствитель ности i-ro вибро преобразователя .
Выходной сигнал блока 6 вибропр образователей (вектор . .. ,Ux
У
Ui); ,U.j, ,. . «Ux;) поступае
ропреобразователя зависят от угловых колебаний платформы, коэффициен. тов поперечнрй чувствительности и координат точек крепления датчиков и определяются системой уравнений
U,i So. х+8„. -y+S. z+ (8„, xfS. у;)(5 + + (8п;Уг5п;2;)0 -(5„, х-Зд, z;)( ;
и,,, 8„.х+8„.у+8,;г+(8„х;-8„.у;)( + + (8„;у;-8о; z;)e -(.-S,/Zj)( ;
на первый вход первого вычислитель ного блока 7, на второй вход котор го от второго блока 15 задания поступают сигналы, пропорциональные координатам точек установки виброп образователей (вектор А х у; Z
и коэффициентам поперечной чувстви тельности вибропреобразователей (вектор 8п Sn, , 8,. .. ,8п;, о ределяющийся экспериментально до н чала испытаний).
35 Расчет вектора воспроизводимых
и,..8„.. у.8„. г+(8„.х-8„;у.)уч- ««Р « У . V . . «
точке, соответствующей геометричес му центру платформы 1, производится вычислительным блоком 7 по след5тощи
+ (Soiy;-8n,-z;)0 -(80; .)(/, (2)
где и,, Uy,, U,j,. - выходные сигналы вибропреобразователей, оси чувст Sn, 8„, (8;. х.-5о,у, )(8„,у,-8„, 2,)(8„, х,-8, zj ,(,)(,)-(,) SH, So 8„ (8oj х,-8„,у,)(8„,у,-8„, z)-(8, х,-8„ z,)
Sn, So, S (80 .y ) (Sn4 У4 -So4 2 )-(8„4 4-5п4 z) Sns Sn, So5 (8„,. х,.) (8о,У,-8„, Zy)-(8o., ,.) Sn6S« 8y(,-8 yj48o,y6-8n,z)-()
- определитель системы уравнений (2); Применение второго блока 15 за- &х, лу, Az,uc, u9 ,uCf - определи- дания позволяет дополнительно учесть тели, получающиеся из определителя влияния коэффициентов поперечной Дзаменойстолбца,составленного изкоэ- чувствительности вибропреобразовате- ффициентов при неизвестной компоненте лей на линейные и угловые ускорения векторе еоставляющими векторами U . платформы 1 .
5
О
-5 0
вительности которых ориентированы в направлении осей Ох, Оу и Oz соот- „ ветственно:// II I/ « П ,
x,y,z, Cf , а , cf - текущие воспроиз- водимые линейные и угловые ускорения геометрического центра поверхности платформы 1; X, У; Z; - координаты точек
установки i-ro вибр ропреобразователя в системе координат 6xyz
SQ. , - основная и поперечная чувствитель ности i-ro вибропреобразователя .
Выходной сигнал блока 6 вибропреобразователей (вектор . .. ,Ux ,
У
Ui); ,U.j, ,. . «Ux;) поступает
на первый вход первого вычислительного блока 7, на второй вход которого от второго блока 15 задания поступают сигналы, пропорциональные координатам точек установки вибропреобразователей (вектор А х у; Z,)
и коэффициентам поперечной чувствительности вибропреобразователей (вектор 8п Sn, , 8,. .. ,8п;, определяющийся экспериментально до начала испытаний).
5 Расчет вектора воспроизводимых
««Р « У . V . . «
««Р « У . V . . «
0
I
точке, соответствующей геометрическому центру платформы 1, производится вычислительным блоком 7 по след5тощим
; У ; .
utp
т
выражениям х
и й( л Ье ч
V -ri6 -f- 4
5. 1
С выхода первого вычислительного блока 7 сигнал через первый аналого- цифровой преобразователь 8 поступает на первый вход цифровой управляющей машины 9, которая рассчитывает тре- буемые значения сигналов управления каждым вибровозбудителем 4.
Использование многокоординатного вибростенда повышает точность воспроизведения пространственных вибраций на платформе стенда, точность воспроизведения эксплуатационных нагрузок и достоверность лабораторных испытанда, что позволяет выявить недостатки конструкции изделия и своевременно устранить их.
Формула изобретени
Многокоординатный вибростенд, содержащий-платформу, предназначенную дпя установки испытуемого изделия, вибровозбудители, соединительные узлы, связывающие вибровоз
Редактор Л.Повхан
Составитель Ю.Круглов Техред Л.Сердюкова
Корре Подпи
7428/38 Тираж 776
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий П 3035, Москва, .Ж-35, Раушская наб., д, 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная,4
o
57
0
5
16
удители с платформой, последовательно соединенные блок вибропреобразователей, связанный с платформой, вычислительный блок, аналого-цифровой преобразователь, цифровую управляющую машину, цифроаналоговый преобразователь и блок формирования управляющих сигналов, выходы которого соединены с входами вибровозбудителей, и блок задания, отличающийся тем, что, с целью повышения достоверности за счет повьш1е- ния точности воспроизведения пространственных вибраций, он снабжен последовательно соединенными вторым блоком задания, первый выход которого соединен с вторым входом вычислительного блока, вторым.вычислительным блоком, первый вход которого соединен с выходом первого блока задания, и вторым аналого-цифровым преобразователем, выход которого соединен с вторым входом, цифровой управляющей машины.
Корректор Е.Сирохман Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ КОНТРОЛЯ ЕГО РАБОТОСПОСОБНОСТИ НА РАБОТАЮЩЕМ ОБЪЕКТЕ | 2015 |
|
RU2602408C1 |
| Способ определения коэффициента демпфирования и устройство для его осуществления | 1989 |
|
SU1679233A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ПРОСТРАНСТВЕННОЙ ВИБРАЦИИ И СПОСОБ ПОВЫШЕНИЯ ЕГО ЭКСПЛУАТАЦИОННОЙ НАДЕЖНОСТИ | 2017 |
|
RU2667336C1 |
| СПОСОБ РЕНТГЕНОВСКОЙ ТОМОГРАФИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2505800C2 |
| Способ определения работоспособности преобразователя пространственной вибрации на работающем объекте | 2021 |
|
RU2775572C1 |
| Пьезоэлектрический преобразователь пространственной вибрации и способ контроля его работоспособности на работающем объекте | 2021 |
|
RU2764504C1 |
| Способ обезвешивания и возбуждения колебаний при модальных испытаниях и устройство для его осуществления | 2017 |
|
RU2677942C2 |
| ИЗМЕРИТЕЛЬ ПРОСТРАНСТВЕННЫХ ВИБРАЦИЙ | 2010 |
|
RU2454644C1 |
| Шестикоординатный вибростенд | 1990 |
|
SU1753322A1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
Изобретение относится к испытательной технике. Целью изобретения является повышение достоверности виброиспытаний на надежность за счет повышения точности воспроизведения пространственных вибраций. Сигналы с блока 6 вибропреобразо- вателей поступают на первый вход первого вычислительного блока 7, на второй вход которого с первого выхода второго блока 15 задания поступают сигналы, пропорциональные координатам точек установки и коэффициентам поперечной чувствительности вибропреобразователей. Второй вычислительный блок 13 обеспечивает преобразование вибраций в заданных -{юч- ках в пространственные колебания гег ометричёского центра. На основании выходных сигналов вычислительных блоков 7 и 13 цифровая управляющая машина 9 определяет сигналы управле ния для вибровозбудителей 4. 1 ил. (Л 1C 00 со СП -vj lA,fa