Изобретение относится к антенной технике и может использоваться для юстировки зеркальных антенн (ЗА) стационарного и мобильного базирования по сигналам космических радиоизлучающих объектов (КРО) с известными параметрами положения. Использование высокочастотных диапазонов в радиоприемных комплексах различного назначения (связь, навигация и др.), построенных на основе космических сегментов с космическими аппаратами (КА) на различных орбитах, обуславливает уменьшение ширины луча диаграммы направленности (ДН) антенн наземных комплексов. Это, в свою очередь, определяет необходимость более точного наведения луча в направлении на КРО, что влечет за собой повышение требований к точности юстировки, заключающейся в определении исходной пространственной ориентации антенны при ее монтаже и последующей калибровке датчиков углов.
Необходимость юстировки ЗА определяется неточностью установки антенны, обуславливающей:
- отклонение азимутальной оси вращения антенны от геодезического зенита;
- отклонение положения электрической оси антенны при нулевом показании датчика угла азимута от направления на географический север;
- отклонение положения электрической оси антенны при нулевом показании датчика угла места от плоскости геодезического горизонта.
Теоретические основы методов измерений характеристик и основанных на них способах юстировки антенн рассмотрены в [1 - Захарьев Л.Н., Леманский А.А., Турчин В.И. и др. Методы измерения характеристик антенн СВЧ. Под ред. Н.М. Цейтлина. - М.: Радио и связь, 1985. - 114 с.].
Известны способы, обеспечивающие повышение точности юстировки за счет исключения ошибки, вносимой не параллельностью азимутальной оси вращения юстируемой антенны и калибровочной вышки [2 - Пат. 2231803 Российская Федерация, МПК G01R 29/10. Способ юстировки антенны / Пихновский Г.П., Валов А.В., Герасимов Н.В.; заявитель и патентообладатель Государственное унитарное предприятие «Конструкторское бюро приборостроения» - №2002116985/09; заявл. 25.06.2002 г., опубл. 27.06.2004 г.; 3 - Пат. 2252427 Российская Федерация, МПК G01R 29/10, G01S 7/40. Способ юстировки оптической оси визира и электрической оси антенны / Пихновский Г.П., Валов А.В.; заявитель и патентообладатель Государственное унитарное предприятие «Конструкторское бюро приборостроения» - №2002135659/09; заявл. 26.12.2002 г., опубл. 20.05.2005 г.]. Указанная непараллельность может быть связана, в частности, с указанным выше отклонением азимутальной оси вращения от геодезического зенита.
Общим недостатком указанных способов юстировки является возможность их использования, как правило, для стационарных антенн. При этом установка калибровочных вышек не всегда возможна или целесообразна, в частности, в условиях плотной городской застройки. При эксплуатации передвижных антенных систем использование калибровочных вышек практически невозможно.
Известен способ юстировки антенн [4 - Гриценко А.А., Мехов В.В. Опыт разработки ситуационного центра для решения задач радиоконтроля в диапазонах частот спутниковых служб // Ионосфера. 2015. №68. С. 21-24], принятый за прототип, не связанный с использованием калибровочных вышек и основанный на юстировке с использованием принимаемых сигналов от нескольких (три и более КРО с известными координатами). Данный способ заключается в следующем:
- не менее чем для трех КРО, находящихся на равном и как можно большем угловом удалении друг от друга, для каждого КРО выполняется расчет целеуказаний на момент времени юстировки для наведения антенной системы на КРО (выполняется точный прогноз положения КРО на эпоху) и производится наведение луча антенны на КРО по максимуму принимаемого от выбранного КРО сигнала с фиксацией угловых координат;
- для каждого измерения вычисляется разность между расчетными и текущими угловыми направлениями на КРО;
- после выполнения двух предыдущих операций получается три и более (по числу КРО) значений разности угловых координат по углу азимута и углу места, представляющих собой методические и инструментальные ошибки, включающие систематическую и случайную составляющие. С учетом того, что систематические составляющие являются ошибками юстировки, а случайные составляющие распределены по нормальному закону, ошибки юстировки определяются как среднее арифметическое значение разности измерений.
Недостатками данного способа юстировки антенны являются:
- предположение об отсутствии ошибки, обусловленной отклонением азимутальной оси вращения антенны от геодезического зенита;
- необходимость использования трех и более КРО, расположенных на равных расстояниях друг от друга, что снижает возможность проведения юстировки;
- недостаточная точность юстировки, определяемая использованием для проведения юстировки средних арифметических значений вычисленных разностей.
Задачей, на решение которой направлено предлагаемое изобретение, является устранение указанных недостатков известного способа, то есть обеспечение возможности юстировки ЗА с использованием одного КРО с произвольным угловым положением относительно юстируемой антенны, а при использовании двух и более КРО с произвольными угловыми положениями относительно юстируемой антенны - повышение точности юстировки за счет более точного учета геометрических факторов расположения КРО, используемых для юстировки.
Для решения указанной задачи предлагается способ юстировки зеркальной антенны по сигналам космических радиоизлучающих объектов, положение которых относительно топоцентрической системы координат, начало которой связано с точкой размещения ЗА, является известным в момент юстировки, заключающийся в том, что по результатам приема юстируемой ЗА сигнала от каждого (одного или нескольких) КРО осуществляется оценивание углов Ξ, Ψ и Θ, определяющих положение конструкции ЗА в указанной топоцентрической системе координат (Ξ, Ψ и Θ - углы, определяющие три последовательных поворота конструкции ЗА, при которых антенна занимает свое положение).
Согласно изобретению, с использованием сигналов, принимаемых ЗА от КРО (одного или нескольких), проводят измерения углового положения КРО относительно ЗА, при проведении которых фиксируют показания датчиков угла места εn и угла азимута ϕn (n=1,…, N, N - число измерений, проводимых для юстировки ЗА). На основании результатов измерений, из условия минимизации функционала Ω(Ξ, Θ), находят оценки углов  ,
, и
и  , определяющие угловую ориентацию конструкции ЗА в топоцентрической системе координат, начало которой связано с точкой размещения ЗА, т.е. проводят юстировку антенны.
, определяющие угловую ориентацию конструкции ЗА в топоцентрической системе координат, начало которой связано с точкой размещения ЗА, т.е. проводят юстировку антенны.
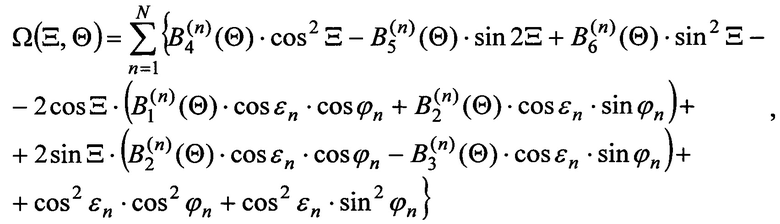
Функционал Ω(Ξ, Θ) представляет собой сумму невязок между измеряемыми с использованием ЗА значениями углов места εn и азимута ϕn КРО, используемыми для юстировки и аналогичными значениями углов этих же КРО, полученных для углов Ξ, Ψ и Θ, и имеет вид
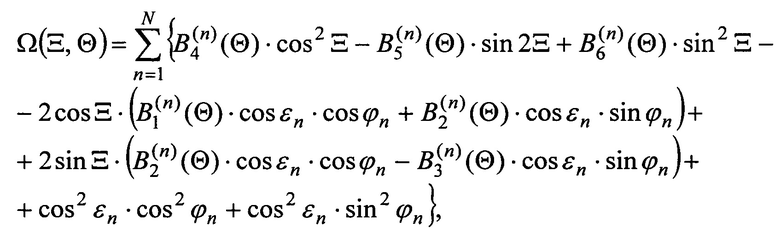
в котором 





 и
и  - соответственно угол места и угол азимута в топоцентрической системе координат при проведении n-го измерения по сигналам КРО для юстировки ЗА (n=1, …, N;
- соответственно угол места и угол азимута в топоцентрической системе координат при проведении n-го измерения по сигналам КРО для юстировки ЗА (n=1, …, N;  , Nm - число измерений при юстировке с использованием m-го КРО; М - число КРО, с использованием которых проводится юстировка антенны).
, Nm - число измерений при юстировке с использованием m-го КРО; М - число КРО, с использованием которых проводится юстировка антенны).
Техническим результатом изобретения является расширение возможностей по юстировке и повышению точности юстировки ЗА при использовании одного или нескольких КРО.
Сочетание отличительных признаков и свойств предлагаемого способа из современного уровня техники неизвестно, поэтому он соответствует критериям «новизны» и «изобретательского уровня».
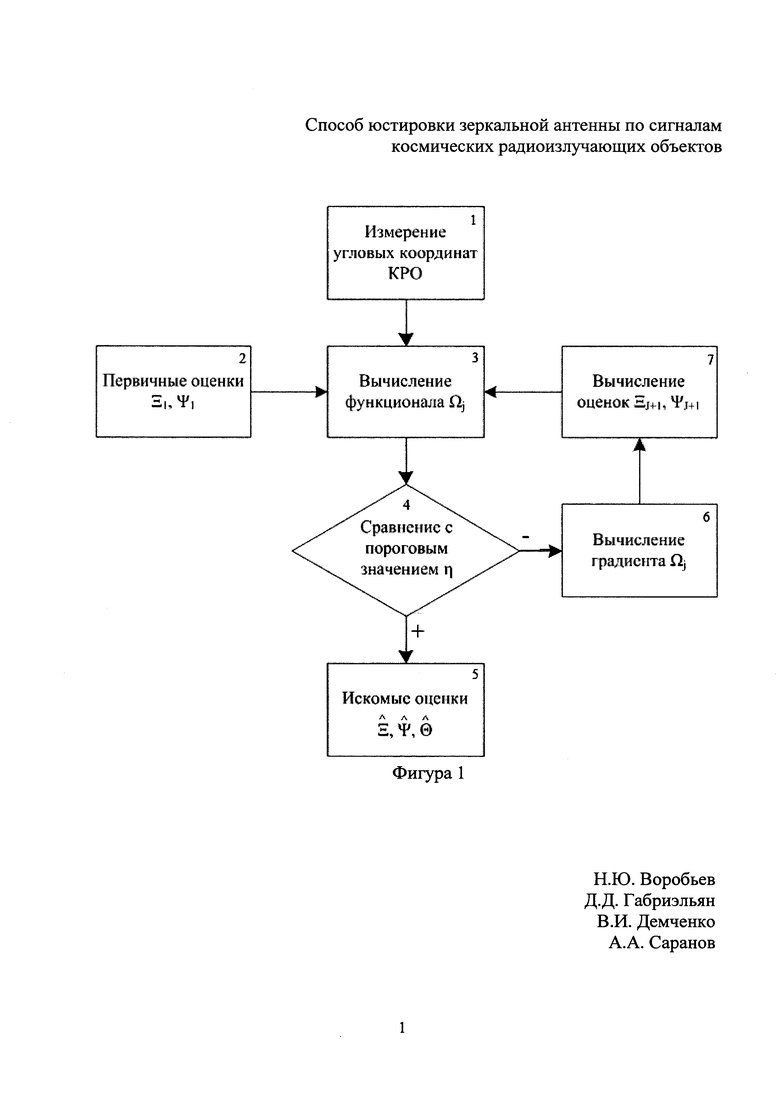
На фиг. 1 изображена последовательность операций, выполняемых при юстировке ЗА с использованием предлагаемого способа.
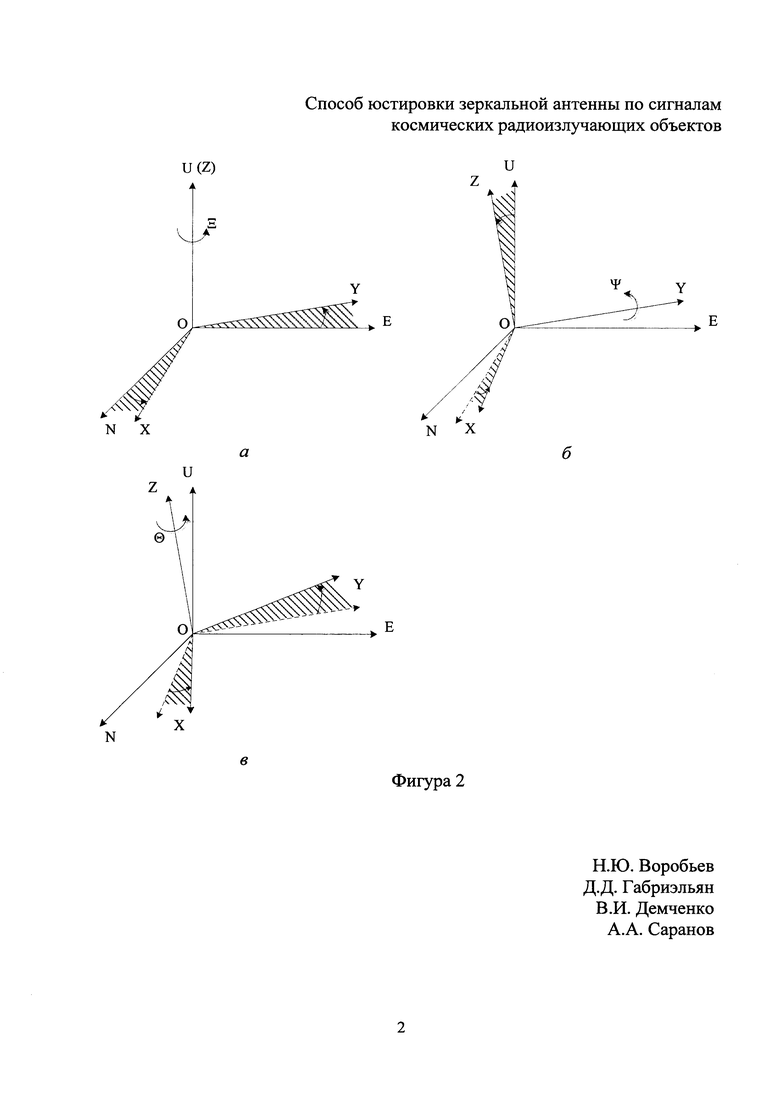
На фиг. 2 изображены топоцентрическая система координат ONEU, связанная с ЗА, а также показана последовательность поворотов на углы Ξ, Ψ и Θ, определяющие ориентацию ЗА в топоцентрической системе координат.
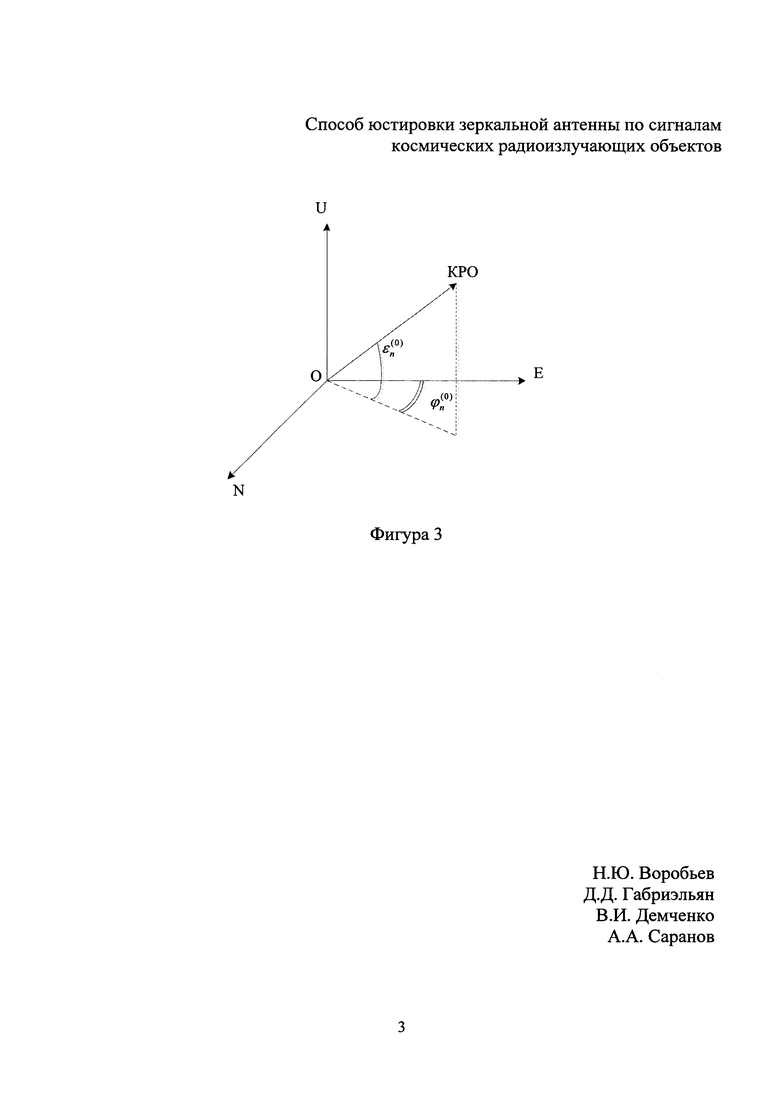
На фиг. 3 показаны определяемые для КРО угол места  , угол азимута
, угол азимута  в топоцентрической системе координат.
в топоцентрической системе координат.
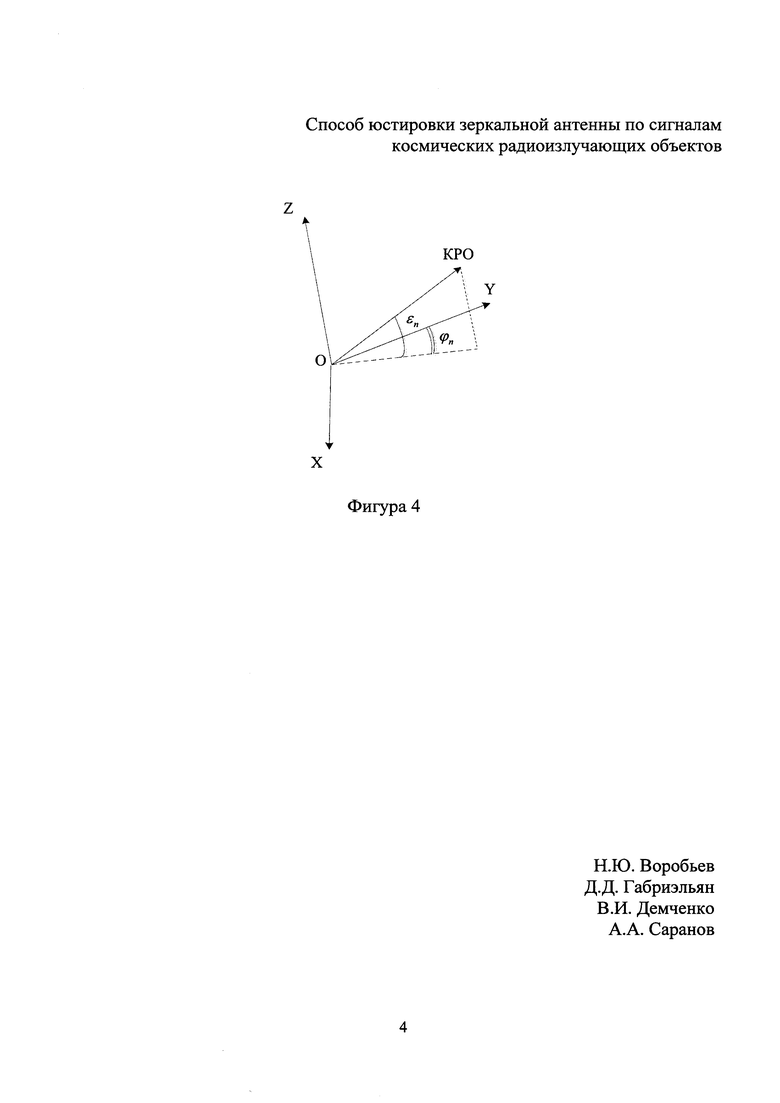
На фиг. 4 показаны определяемые для КРО угол места εn, угол азимута ϕn в системе координат, связанной с ЗА.
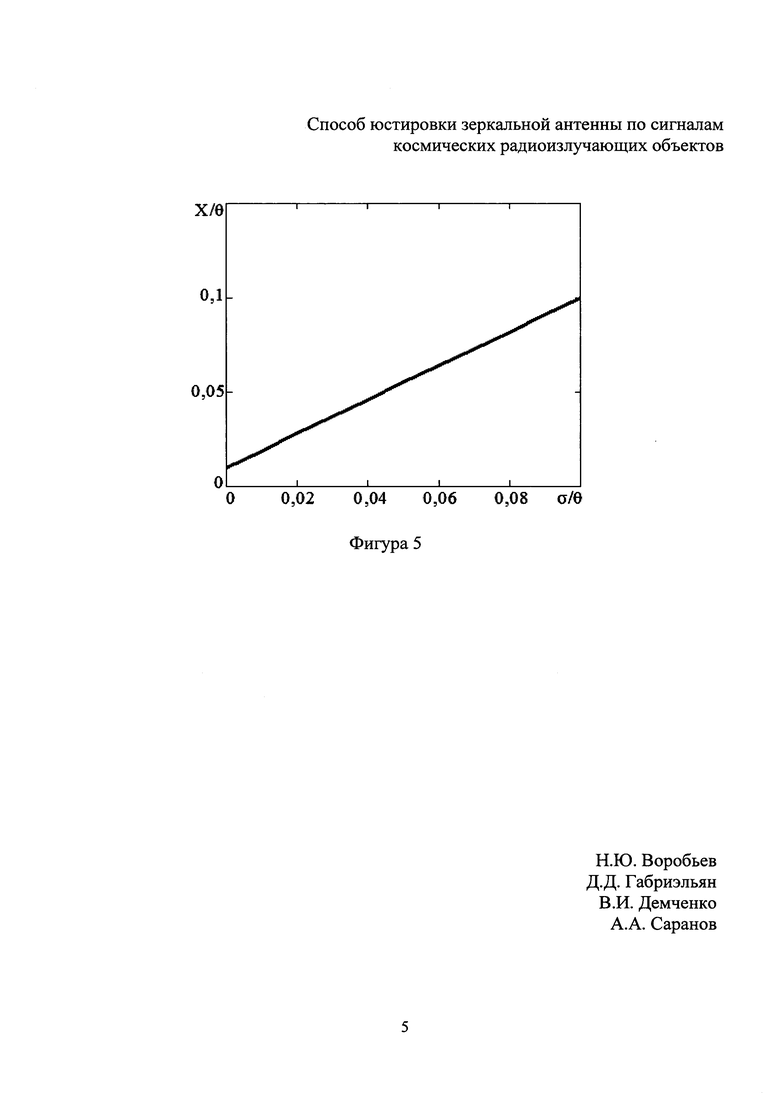
На фиг. 5 приведена зависимость среднеквадратической погрешности углового положения электрической оси антенны после юстировки.
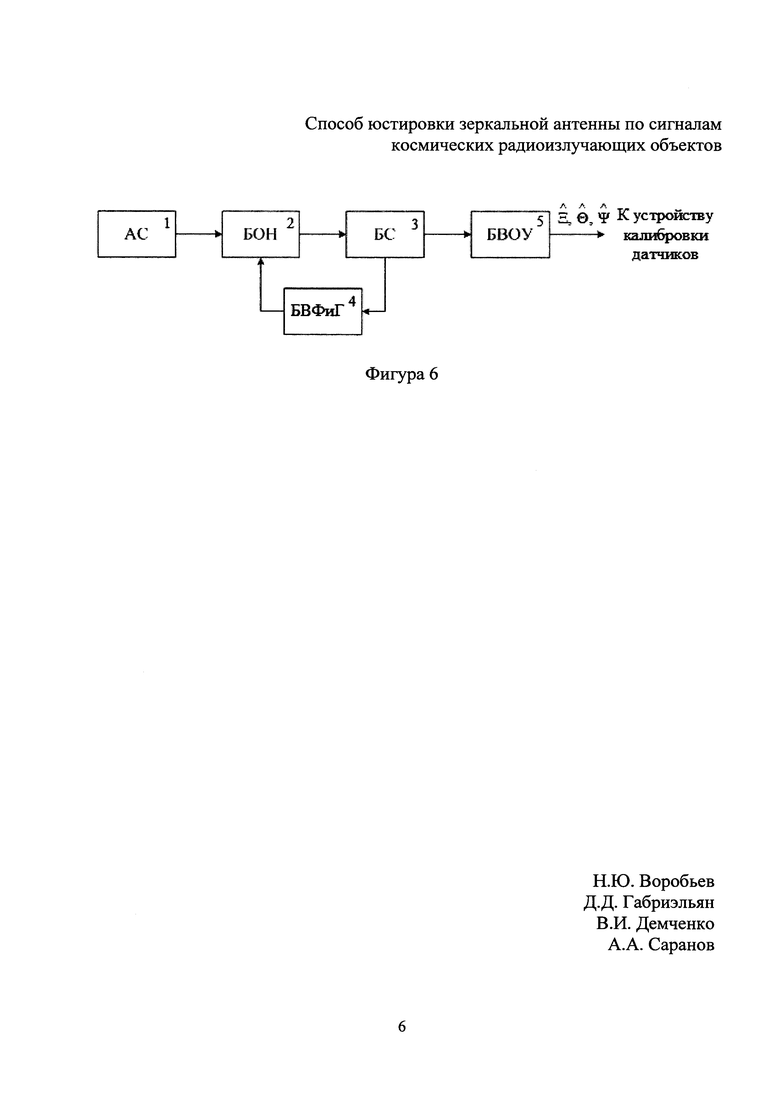
На фиг. 6 показана структурная схема устройства, реализующего данный предлагаемый способ.
Приведем более подробное описание способа. Производят прием радиосигнала, излучаемого одним или несколькими КРО, при этом измеряют параметры положения КРО в топоцентрической системе координат в известные моменты времени. Измерения проводят одним из известных способов, в частности, по максимуму сигнала, принимаемого антенной, или моноимпульсным способом [5 - Теоретические основы радиолокации: Учебн. пособие для вузов / А.А. Коростелев, Н.Ф. Клюев, Ю.А. Мельник и др.; Под ред. В.Е. Дулевича. - 2-е изд., перераб. и доп. - М.: Сов. радио, 1978. 608 с.]. При измерении фиксируют показания датчиков угла места и угла азимута, соответствующих наведению электрической оси ЗА на КРО. С использованием полученных данных находят оценки углов , и , определяющих ориентацию ЗА в топоцентрической системе координат, центр которой связан с ЗА.
При реализации предлагаемого способа выполняется следующая последовательность операций:
1. Для проведения юстировки ЗА выполняется измерение угловых координат одного или нескольких КРО, положения которых в топоцентрической системе координат в момент проведения измерений являются известными. При проведении измерений фиксируют показания датчика угла места εn и угла азимута ϕn, соответствующих наведению электрической оси антенны на наблюдаемый КРО при проведении n-го измерения.
2. На основе результатов измерений угловых координат КРО, угол места  и угол азимута
и угол азимута  которого при проведении n-го измерения в топоцентрической системе координат в момент проведения измерений являются известными (n=1, …, N;
которого при проведении n-го измерения в топоцентрической системе координат в момент проведения измерений являются известными (n=1, …, N;  , Nm - число измерений при юстировке с использованием m-го КРО; М - число КРО, с использованием которых проводится юстировка антенны), составляется система трех уравнений, связывающая между собой значения углов, определяющих положение КРО в топоцентрической системе координат в момент проведения измерений, показания датчиков углов ЗА при наведении электрической оси ЗА на КРО в момент проведения измерений и углы Ξ, Ψ и Θ, определяющие ориентацию ЗА в топоцентрической системе координат.
, Nm - число измерений при юстировке с использованием m-го КРО; М - число КРО, с использованием которых проводится юстировка антенны), составляется система трех уравнений, связывающая между собой значения углов, определяющих положение КРО в топоцентрической системе координат в момент проведения измерений, показания датчиков углов ЗА при наведении электрической оси ЗА на КРО в момент проведения измерений и углы Ξ, Ψ и Θ, определяющие ориентацию ЗА в топоцентрической системе координат.
n=1, …, N.
С использованием третьего уравнения системы (1) производится исключение неизвестной Ψ из системы уравнений (1) с использованием замены
Решение полученной системы двух уравнений находится из условия минимизации функционала, составленного как сумма квадратов левых частей первого и второго уравнений из (1) с учетом проведенной замены (2). Данный функционал имеет вид
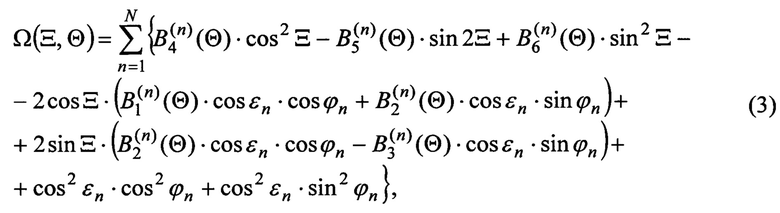
в котором 





Данный функционал представляет собой сумму квадратичных невязок между значениями углов КРО, измеряемыми с использованием юстируемой ЗА, и значениями углов, определяющими положение КРО в топоцентрической системе координат, а также углами Ξ, Ψ и Θ, значения которых уточняют с использованием итерационного алгоритма.
3. Оценки углов  ,
,  и
и  , определяющих положение антенны в топоцентрической системе координат ONEU, находятся из условия минимизации сформированного функционала по значениям углов Ξ, Ψ и Θ.
, определяющих положение антенны в топоцентрической системе координат ONEU, находятся из условия минимизации сформированного функционала по значениям углов Ξ, Ψ и Θ.
Указанная последовательность операций приведена на фиг. 1.
Проведенный сравнительный анализ заявленного способа и прототипа показывает, что в заявленном способе изменены режимы двух операций прототипа:
- для юстировки ЗА используют не три КРО, расположенных на равном расстоянии друг от друга, а один или несколько КРО с произвольным угловым положением относительно юстируемой ЗА;
- угловую ориентацию ЗА в топоцентрической системе координат для угла места и угла азимута определяют не как среднее арифметическое значение разности соответствующих измеренных значений углов и углов положения КРО в топоцентрической системе координат, а из условия минимизации функционала (3).
Рассмотрим более подробно существо предлагаемого способа. В точке размещения ЗА задается топоцентрическая система координат ONEU, показанная на фиг. 2. Ось ОЕ лежит в плоскости геодезического горизонта и направлена на географический восток, ось ON данной системы координат лежит в плоскости геодезического горизонта и направлена на географический север, и ось OU совпадает с направлением геодезического зенита, дополняя систему координат до правой тройки. Ориентация антенны, рассматриваемой как твердое тело, относительно топоцентрической системы координат может быть определена с помощью трех углов Эйлера Ξ, Ψ и Θ, показанных на фиг. 2. Указанные углы описывают последовательные вращения ЗА и связанной с ней декартовой системы координат Oxyz как твердого тела относительно топоцентрической системы координат [6 - Г. Корн, Т. Корн. Справочник по математике (для научных работников и инженеров). - М.: Наука. Гл. ред. физ.-мат. лит., 1977. - 832 с. ]. Приведенная на фиг. 3 последовательность поворотов включает:
- поворот вокруг оси Oz (первоначально ось Oz совпадает с осью OU) на угол Ξ;
- поворот вокруг полученной после первого преобразования оси Оу на угол Ψ;
- поворот вокруг полученной после второго преобразования оси Oz на угол Θ.
Положение КРО в топоцентрической системе координат ONEU при проведении юстировки антенны является известным и определяется углом места  и углом азимута
и углом азимута  (фиг. 3). Однако из-за несовпадения осей системы координат Oxyz, связанной с антенной, с осями топоцентрической системы координат ONEU, как показано на фиг. 2, угол места εn и угол азимута ϕn, отсчет которых показан на фиг. 3, измеряемые по показаниям соответствующих датчиков, отличаются от
(фиг. 3). Однако из-за несовпадения осей системы координат Oxyz, связанной с антенной, с осями топоцентрической системы координат ONEU, как показано на фиг. 2, угол места εn и угол азимута ϕn, отсчет которых показан на фиг. 3, измеряемые по показаниям соответствующих датчиков, отличаются от  и
и  . Несовпадение осей антенны с осями топоцентрической системы координат ONEU, как отмечалось выше, заключается в отклонении азимутальной оси вращения антенны от геодезического зенита, отклонении положения электрической оси антенны при нулевом показании датчика угла азимута от направления на географический север и отклонении положения электрической оси антенны при нулевом показании датчика угла места от плоскости геодезического горизонта.
. Несовпадение осей антенны с осями топоцентрической системы координат ONEU, как отмечалось выше, заключается в отклонении азимутальной оси вращения антенны от геодезического зенита, отклонении положения электрической оси антенны при нулевом показании датчика угла азимута от направления на географический север и отклонении положения электрической оси антенны при нулевом показании датчика угла места от плоскости геодезического горизонта.
Взаимосвязь между угловым положением КРО в топоцентрической системе координат ONEU и угловым положением, измеряемым антенной, определяется следующим преобразованием

в котором элементы матрицы А определяются выражениями [6]
А11=cos Ξ ⋅ cos Ψ ⋅ cos Θ - sin Ξ ⋅ sin Θ,
A12=-cos Ξ ⋅ cosΨ ⋅ sin Θ - sinΞ ⋅ cos Θ,
A13=cos Ξ⋅cos Ψ
A21=sin Ξ ⋅ cos Ψ ⋅ cos Θ + cos Ξ ⋅ sin Θ,
A22=-sin Ξ ⋅ cos Ψ ⋅ sin Θ + cosΞ ⋅ cos Θ
A23=sin Ξ ⋅ sin Ψ
A31=-sinΨ ⋅ cosΘ, A32=sinΨ ⋅ sinΘ, А33=cosΨ.
Данная матрица построена таким образом, что в нее входят все три угла, определяющие ориентацию ЗА в топоцентрической системе координат. Неизвестные углы Ξ, Ψ и Θ определим из условия минимизации следующего квадратичного функционала
где Т - знак операции транспонирования.
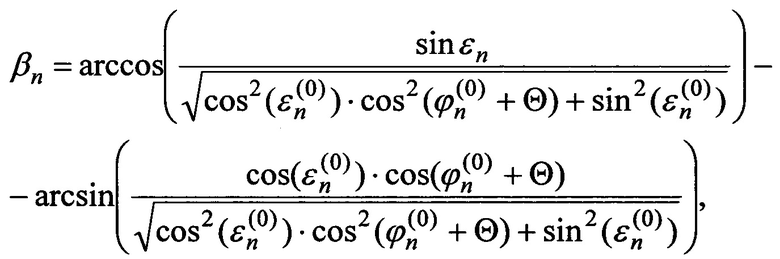
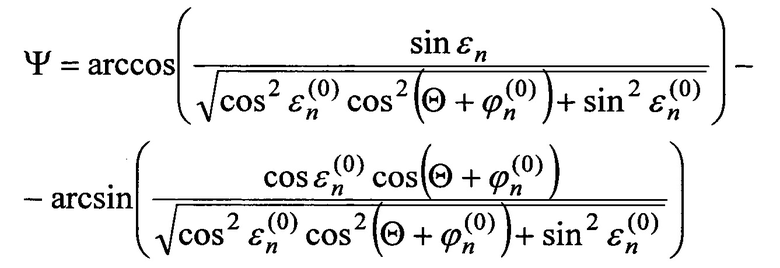
С использованием третьей строки матричного уравнения (4) выразим угол Ψ через угол Θ с помощью следующего выражения
Это позволяет перейти от квадратичного функционала (5), определяемого тремя переменными Ξ, Ψ и Θ, к более простому функционалу относительно двух Ξ и Θ переменных
в котором






Выражения (4)-(7) определяют однозначную связь между углом места и углом азимута при наблюдении КРО в топоцентрической системе координат, измеряемыми с использованием ЗА углом места и углом азимута того же КРО с углами Ξ, Ψ и Θ, определяющими ориентацию ЗА относительно топоцентрической системы координат.
Для определения оценок углов Ξ, Ψ и Θ в предлагаемом способе наложим условие минимизации квадратичного функционала (7)

Стационарные точки данного функционала определяются из решения системы уравнений

Достаточным условием существования минимума функционала (5) является положительное значение как определителя:

так и его элемента:

в стационарной точке.
Существование производных по всем переменным в (9) и (10) определяется выбором вида функционала Ω(Ξ, Θ).
Решение системы уравнений (9) выполняют с использованием итерационного алгоритма, включающего серию последовательных уточнений углов Ξ и Θ, определяющих положение ЗА относительно топоцентрической системы координат с использованием следующей последовательности операций (фиг. 1):
1. Выполнение измерений угловых координат заданных КРО (однократно или многократно на заданном интервале времени).
2. Выбор первоначальных оценок углов Ξ1=0 и Θ1=0.
3. Вычисление значения квадратичного функционала Ω(Ξj, Θj) при выполнении j-й итерации (первая итерация).
4. Сравнение полученного значения квадратичного функционала с пороговым значением.
5. Выбор при условии, что полученное значение квадратичного функционала меньше порогового Ω(Ξj, Θj)<η, текущих значений Ξj, Θj и соответствующего им значения Ψj, вычисляемого с использованием выражения (6), (j=1, 2, …), в качестве оценки углов, определяющих угловое положение ЗА в топоцентрической системе координат и завершение процесса уточнения оценок углов. Если отмеченное условие выполняется при первой итерации (j=1), Ξ1=0, Θ1=0 и соответственно с (6) Ψ1=0 принимаются как оценки углов, определяющих угловое положение ЗА в топоцентрической системе координат и соответственно юстировка антенны не требуется. При невыполнении указанного в п. 5 условия производятся вторая, а при необходимости (до выполнения условия сравнения в п. 5) и последующие итерации, включающие пп. 6, 7, 3, 4, 5.
6. Вычисление градиента квадратичного функционала в точке Ξj, Θj (j=1, 2, …).
7. Вычисление новых текущих значений углов Ξ и Θ по формулам

где  ,
,  .
.
Сходимость рассматриваемого итерационного процесса определяется тем, что функционал (3) является квадратичной функцией своих переменных и имеет монотонный характер сходимости по каждой из переменных.
Таким образом, данная последовательность операций позволяет решить невырожденную задачу нахождения двух неизвестных углов Ξ и Θ по результатам измерения угла места и угла азимута КРО с использованием ЗА и известным значениям углов места и азимута того же КРО в топоцентрической системе координат. После нахождения оценок углов Ξ и Θ оценка угла Ψ находится на основе соотношения (6). Преимуществом представленного алгоритма является его вычислительная простота, так как, несмотря на громоздкие выражения, определяющие функционал Ω(Ξ, Θ), производные ∂Ω(Ξ,Θ)/∂Ξ и ∂Ω(Ξ, Θ)/∂Θ имеют простую форму.
Для определения достижения технического результата проанализируем точность юстировки ЗА. На фиг. 5 приведена зависимость среднеквадратической погрешности углового положения электрической оси антенны после юстировки X, нормированной к ширине диаграммы направленности (ДН) ЗА по уровню половинной мощности θ, от нормированной также к величине θ погрешности измерений угловых координат σ одного КРО. Значение погрешности X определяется следующей формулой
где элементы матрицы  определяются формулами из (4) для оценок углов
определяются формулами из (4) для оценок углов 
 и
и 
Угол места и угол азимута КРО выбраны равными соответственно ε0=63° и ϕ0=47°.
Рассмотрим реализацию предлагаемого способа юстировки ЗА на примере устройства, приведенного в виде структурной схемы на фиг. 6. В состав устройства входят антенная система (АС) 1, включающая устройства формирования данных об угловом положении КРО - углов εn и ϕn, блок оценивания невязки (БОН) 2, блок сравнения (БС) 3, блок вычисления функции и градиента функции (БВФиГ) 4 и блок вычисления оценок углов (БВОУ) 5, определяющих положение ЗА в топоцентрической системе координат.
Излучаемые КРО радиосигналы принимаются АС 1, и на их основе в АС 1 формируются данные об угловом положении КРО - углов εn и ϕn относительно ЗА в привязке к моменту времени измерения. Определение углового положения КРО относительно ЗА проводится с использованием одного из известных способов, например, моноимпульсного.
После завершения сеанса измерений массив значений углов εn, ϕn поступает на первый вход БОН 2. В БОН 2 при выборе первоначальных значений углов Ξ1=0, Θ1=0 происходит определение невязки функционала Ω(Ξ1, Θ1). Полученное значение и значения Ξ1=0, Θ1=0 поступают на вход БС 3, где выполняется сравнение Ω(Ξ1, Θ1) с заданным пороговым значением η. При выполнении условия Ω(Ξ1, Θ1)<η значения Ξ1=0, Θ1=0 принимаются в качестве оценок, определяющих положение ЗА в топоцентрической системе координат. При этом также принимается, что угол Ψ1=0.
В случае Ω(Ξ1, Θ1)>η со второго выхода БС 3 значения Ξ1, Θ1 поступают на вход БВФиГ 4, где вычисляются значения градиента квадратичного функционала Ω(Ξ1, Θ1) и определяются значения Ξ2, Θ2 в соответствии с выражением (11) при j=1. Полученные значения поступают на второй вход БОН 2, где производится вычисление Ω(Ξ2, Θ2), после чего все операции, выполняемые в БОН 2, проводятся для нового значения квадратичного функционала. При необходимости выполняются последующие итерации. При этом при переходе от j-й итерации к j+1-й в БВФиГ 4, в соответствии с формулой (11), вычисляются Ξj+1, Θj+1. Указанные значения поступают на второй вход БОН 2, где производится вычисление Ω(Ξj+1, Θj+1) выхода БОН 2 значения Ω(Ξj+1, Θj+1), Ξj+1, Θj+1 поступают на вход БС 3, и при выполнении условия Ω(Ξj+1, Θj+1)<η поступают на вход БВОУ 5. В БВОУ 5 при этом формируются оценки углов  ,
,  и на основе
и на основе  ,
,  с использованием соотношения (6) оценка
с использованием соотношения (6) оценка  .
.
Таким образом, в результате изменения режима двух операций:
- использование не трех КРО, расположенных на равном расстоянии друг от друга, а одного или нескольких КРО с произвольным угловым положением относительно юстируемой ЗА;
- определение угловой ориентации ЗА в топоцентрической системе координат для угла места и угла азимута на основе минимизации функционала
в котором 





обеспечивающего получение оценок углов  и
и  , и далее с использованием соотношения
, и далее с использованием соотношения
получение оценки угла  позволяет достичь следующий технический результат: расширить возможности по юстировке и повышению точности юстировки ЗА при использовании одного или нескольких КРО.
позволяет достичь следующий технический результат: расширить возможности по юстировке и повышению точности юстировки ЗА при использовании одного или нескольких КРО.
Изобретение относится к антенной технике и может использоваться для юстировки зеркальных антенн стационарного и мобильного базирования по сигналам космических радиоизлучающих объектов с известными параметрами положения. Способ юстировки зеркальной антенны по сигналам космических радиоизлучающих объектов заключается в измерении угловых координат одного или нескольких космических радиоизлучающих объектов, положение каждого из которых в топоцентрической системе координат в момент проведения измерений является известным, формировании функционала, связанного с тремя углами, определяющими ориентацию зеркальной антенны относительно топоцентрической системы координат, и представляющего собой сумму квадратов невязок, соответствующих угловому положению космических радиоизлучающих объектов в топоцентрической системе координат, и измеряемых с помощью зеркальной антенны значений углов и минимизации данного функционала. Техническим результатом изобретения является расширение возможности по юстировке и повышению точности юстировки зеркальной антенны при использовании одного или нескольких космических радиоизлучающих объектов. 6 ил.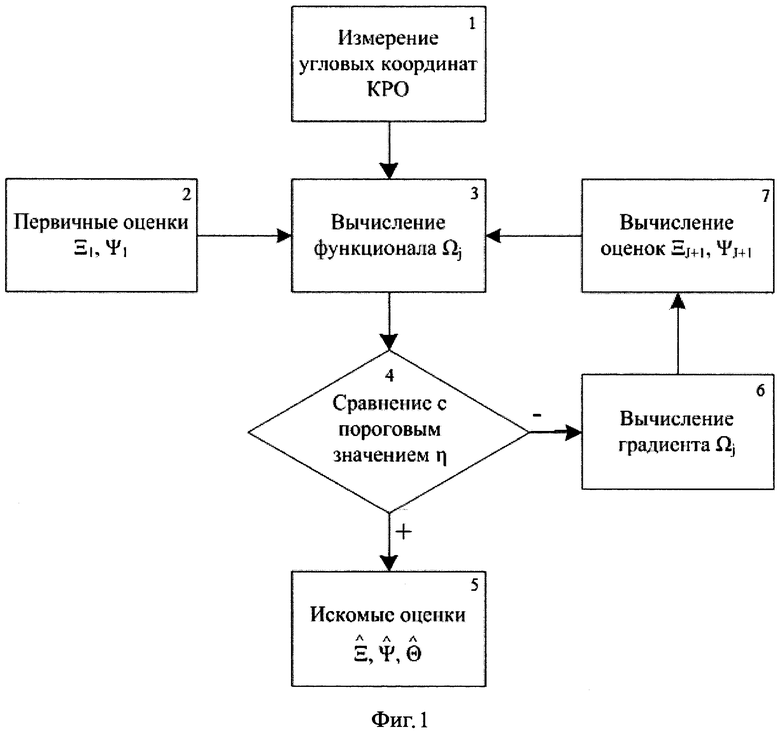
Способ юстировки зеркальной антенны по сигналам космических радиоизлучающих объектов, при котором оценивают углы, определяющие положение конструкции зеркальной антенны по результатам измерений углового положения одного или нескольких космических радиоизлучающих объектов путем приема сигналов их излучения, отличающийся тем, что для юстировки используют один или N космических радиоизлучающих объектов, по результатам измерений угла места εn и угла азимута ϕn определяют угловую ориентацию зеркальной антенны в топоцентрической системе координат на основе минимизации функционала
в котором 





обеспечивающего получение оценок углов  и
и  , и далее с использованием соотношения
, и далее с использованием соотношения
получают оценку угла  .
.
| СПОСОБ ЮСТИРОВКИ АНТЕННЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2003 |
|
RU2262117C2 |
| СПОСОБ И УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2013 |
|
RU2536609C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ АНТЕННЫ | 1995 |
|
RU2217847C2 |
| US 7663543 B2, 16.02.2010. | |||

