Перекрестная ссылка на родственные заявки
[0001] По настоящей заявке испрашивается приоритет в соответствии с не предварительной заявкой на патент США № 15/179,762, поданной 10 июня 2016 года, озаглавленной “SYSTEM AND METHOD FOR AUTONOMOUS VEHICLE COMMUNICATIONS PROTOCOLS”, которая включена в настоящий документ путём ссылки в полном объёме для всех целей.
Уровень техники
[0002] Настоящее изобретение относится, в общем, к автономным транспортным средствам и более конкретно к протоколам обмена данными автономного транспортного средства.
[0003] Некоторые автономные транспортные средства могут работать через системы управления, которые управляют рулевым устройством автономных транспортных средств без значительного вмешательства человека или вообще без него. Например, автономное управление некоторыми сельскохозяйственными тракторами без водителя может происходить на полях с множеством почвенных условий и препятствий. В общем, автономное транспортное средство, такое как сельскохозяйственный трактор без водителя, может быть снабжено картой, которую автономное транспортное средство может использовать, чтобы следовать по определенным траекториям и избегать некоторых особенностей рельефа. Соответственно, систему управления, например, электронную систему управления можно использовать для управления и/или направления автономного транспортного средства иным образом. Таким образом, сельскохозяйственный трактор без водителя можно направлять по полю, имеющему мягкую почву (например, благодаря высокому содержанию влаги в почве), вокруг прудов, вблизи человеческих строений и ограничений (например, заборов, сараев) и так далее. Было бы полезно улучшить протоколы обмена данными автономного транспортного средства.
Раскрытие изобретения
[0004] В одном варианте осуществления система автономного транспортного средства содержит автономное транспортное средство. Автономное транспортное средство содержит систему обмена данными, выполненную с возможностью обмена данными с базовой станцией, и систему управления, соединенную с возможностью обмена данными с системой обмена данными, причем система управления содержит процессор. Процессор выполнен с возможностью приема от базовой станции управляющих команд, выполнения управляющих команд для управления автономным транспортным средством и выполнения протокола задержки между контроллером и подсистемами транспортного средства для определения задержки обмена данными между контроллером транспортного средства и подсистемами транспортного средства и для остановки автономного транспортного средства, если задержка обмена данными превышает устанавливаемое пользователем значение задержки, при этом контроллер транспортного средства и подсистема транспортного средства размещены в автономном транспортном средстве.
[0005]
[0006] В другом варианте осуществления способ содержит передачу управляющих команд от базовой станции и выполнение управляющих команд для управления автономным транспортным средством. Кроме того, способ содержит выполнение протокола задержки между контроллером и подсистемами транспортного средства для определения задержки обмена данными между контроллером транспортного средства и подсистемами транспортного средства и для остановки автономного транспортного средства, если задержка обмена данными превышает устанавливаемое пользователем значение задержки, при этом контроллер транспортного средства и подсистема транспортного средства размещены в автономном транспортном средстве.
[0007] В дополнительном варианте осуществления постоянный машиночитаемый носитель содержит команды, которые при выполнении процессором заставляют процессор передавать управляющие команды от базовой станции и выполнять управляющие команды для управления автономным транспортным средством. Команды при выполнении процессором дополнительно заставляют процессор выполнять протокол задержки между контроллером и подсистемами транспортного средства для определения задержки обмена данными между контроллером транспортного средства и подсистемами транспортного средства и для остановки автономного транспортного средства, если задержка обмена данными превышает устанавливаемое пользователем значение задержки, при этом контроллер транспортного средства и подсистема транспортного средства размещены в автономном транспортном средстве.
Краткое описание чертежей
[0008] Эти и другие признаки, аспекты и преимущества настоящего изобретения станут лучше понятны при прочтении нижеследующего подробного описания со ссылкой на сопровождающие чертежи, на которых одинаковые позиции обозначают одинаковые части на всех чертежах, на которых:
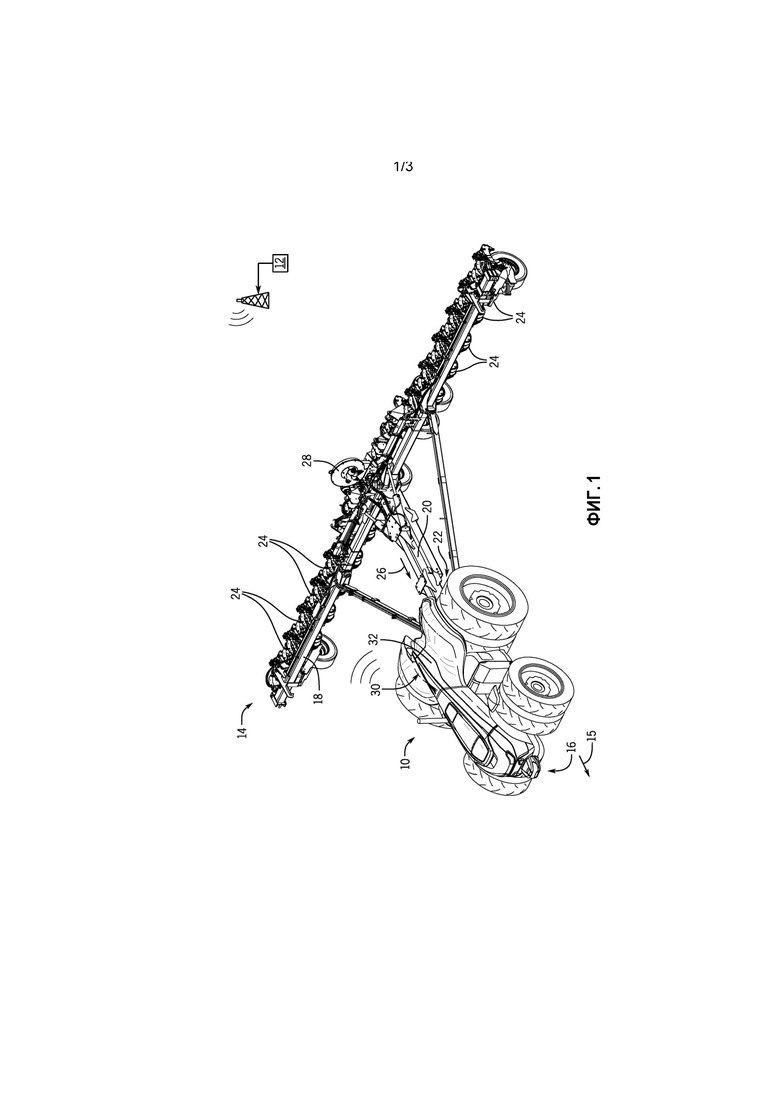
[0009] на фиг. 1 представлено схематичное изображение варианта осуществления автономного транспортного средства, работающего на сельскохозяйственном поле и соединенного с возможностью обмена данными с базовой станцией с помощью протокола обмена данными;
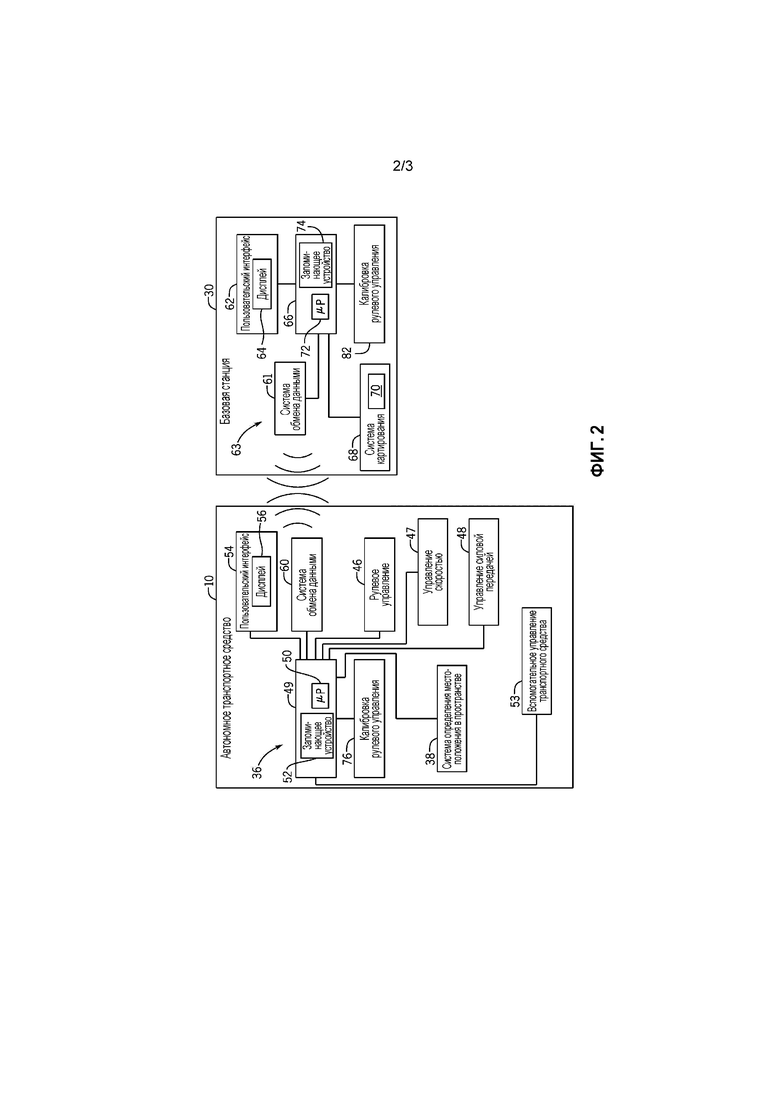
[0010] на фиг. 2 представлена блок-схема варианта осуществления вычислительных систем для сельскохозяйственного транспортного средства фиг. 1 и для базовой станции; а
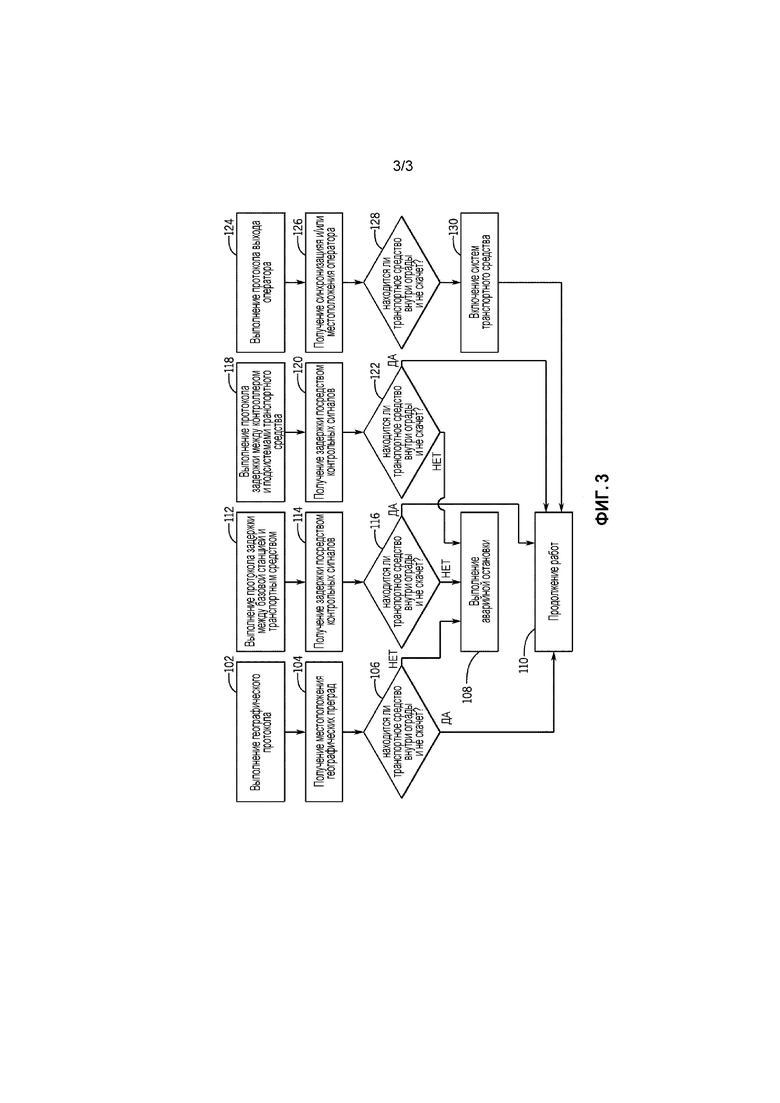
[0011] на фиг. 3 представлена блок-схема варианта осуществления процесса, подходящего для выполнения протоколов обмена данными для автономного транспортного средства фиг. 1.
Осуществление изобретения
[0012] На некоторых сельскохозяйственных и других работах (горнодобывающих, строительных и тому подобное) можно использовать транспортное средство без водителя и/или с водителем, такое как трактор или другое транспортное средство. Для сельскохозяйственных работ транспортное средство может буксировать или содержать сельскохозяйственный инструмент, такой как сажалка, сеялка, устройство для внесения удобрений и так далее. Во время работы транспортное средство может быть соединено с возможностью обмена данными с базовой станцией, например, с помощью радиосвязи. Базовая станция может содержать систему подачи команд и управления, подходящую для подачи автономному транспортному средству определенных команд, а автономное транспортное средство может реагировать на команды посредством автономного приведения в действие какой-то системы (например, системы рулевого управления, дроссельной системы, системы силовой передачи) для движения по рабочей площади.
[0013] Методики, описанные в данном документе, предусматривают определенные протоколы обмена данными, которые включают в себя поддержание действующей радиосвязи между автономным транспортным средством и базовой станцией, включение аварийного отключения (например, аварийной остановки), поддержание географического ограничения работ, поддержание действующего обмена данными между контроллером автономного транспортного средства и определенными подсистемами автономного транспортного средства и обеспечение протоколов, подходящих для выхода и/или входа оператора-человека в автономное транспортное средство, как описано более подробно ниже.
[0014] Обращаясь далее к фиг. 1, показан вид в перспективе варианта осуществления автономного сельскохозяйственного транспортного средства 10, допускающего автономное или ручное управление, которое может быть соединено с возможностью обмена данными с базовой станцией 12. Изображено автономное сельскохозяйственное транспортное средство 10 в соответствии с вариантом осуществления, показанное буксирующим прикрепленный инструмент 14. Автономное сельскохозяйственное транспортное средство 10 содержит контроллер, выполненный с возможностью автоматического направления автономного сельскохозяйственного транспортного средства 10 по полю (например, вдоль направления движения 15) для облегчения сельскохозяйственных работ. Иллюстративные сельскохозяйственные работы, которые автономное сельскохозяйственное транспортное средство 10 и инструмент 14 могут выполнять, включают в себя операции посадки, операции посева, операции внесения, операции обработки почвы, операции уборки и тому подобное. Например, контроллер может автоматически направлять сельскохозяйственное транспортное средство 10, которое тянет инструмент 14, вдоль направляющего прокоса по полю без ввода данных оператором. Контроллер также может автоматически направлять сельскохозяйственное транспортное средство 10 при поворотах по незапаханной полосе между сегментами направляющего прокоса. Для облегчения управления автономным сельскохозяйственным транспортным средством контроллер содержит устройство определения местоположения в пространстве, такое как приемник системы глобального позиционирования (GPS), который выполнен с возможностью подачи информации о положении в контроллер.
[0015] Автономным сельскохозяйственным транспортным средством 10 оператор-человек может управлять удаленно на базовой станции 12. В связи с этим автономное сельскохозяйственное транспортное средство 10 может быть соединено с возможностью обмена данными с базовой станцией 12 через беспроводные технологии. В некоторых вариантах осуществления работающий автономно может относиться к возможности автономного сельскохозяйственного транспортного средства 10 передавать свою окружающую обстановку и работать без ввода данных оператором, как отмечалось выше. Таким образом, автономное сельскохозяйственное транспортное средство 10 может содержать один или более датчиков 16, которые получают данные (например, близость объекта, положение транспортного средства 10, скорость транспортного средства 10, погода и т. д.) и передают данные в контроллер автономного сельскохозяйственного транспортного средства 10. По необходимости контроллер может обрабатывать данные для определения, как автономно управлять автономным сельскохозяйственным транспортным средством 10.
[0016] Кроме того, для осуществления управления инструментом 14 контроллер может хранить сельскохозяйственную карту с конкретными предписаниями (например, нормой посева, местом проведения посева и т. д.). Как изображено, инструмент 14 содержит полую опорную раму 18, буксировочную раму 20, сцепной узел 22 и высевающие секции 24. Более конкретно, один конец буксировочной рамы 20 соединен с полой опорной рамой 18, а другой конец соединен со сцепным узлом 22, который обеспечивает соединение с автономным сельскохозяйственным транспортным средством 10. Таким образом, автономное сельскохозяйственное транспортное средство 10 может буксировать инструмент 14 вдоль направления движения 26.
[0017] Кроме того, как изображено, с полой опорной рамой 18 соединено множество высевающих секций 24. Таким образом, когда автономное сельскохозяйственное транспортное средство 10 буксирует инструмент 14, каждая высевающая секция 24 может помещать семена на необходимую глубину под поверхностью почвы, создавая посредством этого ряды посеянных семян. Необходимо заметить, что количество высевающих секций 24 можно регулировать на основании требуемого количества рядов семян. Другими словами, инструмент 14 можно отрегулировать, чтобы оно содержало 6, 8, 12, 16, 24, 32 или 36 высевающих секций или более.
[0018] Кроме того, промежуток между высевающими секциями 24 можно выбрать на основании типа подлежащих посеву семян. Например, высевающие секции 24 можно разнести на 30 дюймов друг от друга при посеве кукурузы и на 15 дюймов друг от друга при посеве соевых бобов. В связи с этим количество и/или промежуток между высевающими секциями 24 можно регулировать много раз во время срока службы инструмента 14.
[0019] Как описано выше, высевающие секции 24 могут управлять посевом семян. Более конкретно, на каждой высевающей секции 24 можно использовать вакуумметрическое давление для управления скоростью прохождения семян и/или промежутком между посеянными семенами. Соответственно, в изображенном варианте осуществления на опорной раме 18 установлен источник 28 разрежения. В изображенном варианте осуществления на инструменте 14 использован единственный централизованный источник разрежения. В качестве дополнения или альтернативы, можно использовать множество источников разрежения. Например, первый источник разрежения может создавать вакуумметрическое давление на половине высевающих секций 24, а второй источник разрежения может создавать вакуумметрическое давление на другой половине высевающих секций 24.
[0020] В некоторых вариантах осуществления источником 28 разрежения может быть вентилятор, который вытесняет воздух, создавая вакуумметрическое давление. Например, источник 28 разрежения может выталкивать воздух из высевающих секций 24, создавая отрицательное вакуумметрическое давление. Таким образом, можно использовать любой подходящий источник 28 разрежения, такой как вентилятор с гидравлическим приводом, вентилятор с электрическим приводом и так далее. Кроме того, варианты осуществления вентилятора могут содержать осевой вентилятор, вентилятор нагнетательного типа, множество параллельных вентиляторов, множество последовательных вентиляторов, турбовентилятор или любое их сочетание. Для облегчения распределения вакуумметрического давления, для пневматического соединения источника 28 разрежения с полой конструкцией 18 рамы можно использовать трубопровод или систему труб. Рабочее место 30 оператора может содержать крышку 32, которая закрывает отсек рабочего места 30 оператора, который среди прочего содержит складной стул для того, чтобы на нем сидел оператор, рулевое колесо или узел рулевого управления, и/или выключатель зажигания.
[0021] Контроллер и/или базовая станция 12 также может выполнять множество протоколов обмена данными. Например, протокол задержки между базовой станцией и транспортным средством может поддерживать действующую радиосвязь между автономным транспортным средством 10 и базовой станцией 12. Протокол обмена географическими данными может поддерживать географическое ограничение работ. Протокол задержки между контроллером и подсистемами транспортного средства может поддерживать действующую линию связи между контроллером и некоторыми подсистемами автономного транспортного средства. Кроме того, протокол выхода оператора может обеспечивать возможность выхода оператора-человека из автономного транспортного средства 10, а затем предотвращать повторный запуск автономного транспортного средства 10 до тех пор, пока оператор не будет находиться на требуемом расстоянии (например, вдалеке на базовой станции 12).
[0022] Обращаясь далее к фиг. 2, на фигуре представлено схематичное изображение варианта осуществления системы 36 управления, которую можно задействовать в автономном транспортном средстве 10 фиг. 1. В проиллюстрированном варианте осуществления система 36 управления содержит систему 38 определения местоположения в пространстве, которая установлена на автономном сельскохозяйственном транспортном средстве 10 и выполнена с возможностью определения положения, а в некоторых вариантах осуществления, скорости автономного сельскохозяйственного транспортного средства 10. Как должно быть понятно, система 38 определения местоположения в пространстве может содержать любую подходящую систему, выполненную с возможностью измерения и/или определения положения автономного сельскохозяйственного транспортного средства 10, такую как приемник системы глобального позиционирования (GPS) и/или, например, GLONASS или другую аналогичную систему. Для повышения точности позиционирования в системе 38 определения местоположения в пространстве можно дополнительно использовать методики кинематики реального времени (RTK).
[0023] В некоторых вариантах осуществления контроллер также может содержать инерциальный измерительный блок (IMU), соединенный с возможностью обмена данными с контроллером и выполненный с возможностью повышения точности установленного положения и/или ориентации. Например, IMU может содержать один или более акселерометров, выполненных с возможностью подачи сигнала (сигналов), показывающего ускорение вдоль продольной оси, боковой оси, вертикальной оси или их сочетание. Кроме того, IMU может содержать один или более гироскопов, выполненных с возможностью подачи сигнала (сигналов), показывающего поворот (например, угол поворота, скорость поворота, угловое ускорение и т. д.) вокруг продольной оси, боковой оси, вертикальной оси или их сочетание. Для облегчения определения положения (например, пока препятствие, такое как дерево или здание, блокирует попадание сигналов пространственного расположения в антенны определения местоположения в пространстве), пока сигналы пространственного расположения, принимаемые устройством определения местоположения в пространстве, являются неудовлетворительными, контроллер может определять положение и/или ориентацию сельскохозяйственного транспортного средства на основании IMU сигнала (сигналов). Кроме того, контроллер может использовать IMU сигнал (сигналы) для повышения точности установленного положения и/или ориентации. Например, для определения более точного положения и/или ориентации сельскохозяйственного транспортного средства (например, путем компенсации движения устройства определения местоположения в пространстве, обусловленного наклоном и/или креном автономного сельскохозяйственного транспортного средства 10, когда транспортное средство 10 движется по неровному рельефу) контроллер может объединять IMU сигнал (сигналы) с данными определения местоположения в пространстве и/или положением, установленным устройством определения местоположения в пространстве (например, с помощью калмановской фильтрации, подбора методом наименьших квадратов и т. д.)
[0024] В некоторых вариантах осуществления IMU и устройство определения местоположения в пространстве можно расположить внутри общего корпуса. В дополнительных вариантах осуществления внутри общего корпуса можно расположить IMU и одну антенну определения местоположения в пространстве. Например, каждый корпус антенны определения местоположения в пространстве может содержать антенну определения местоположения в пространстве и IMU. Кроме того, в некоторых вариантах осуществления внутри общего корпуса можно расположить часть устройства определения местоположения в пространстве и одну антенну определения местоположения в пространстве. Например, внутри первого корпуса первый можно расположить часть устройства определения местоположения в пространстве и первую антенну определения местоположения в пространстве, а внутри второго корпуса можно расположить вторую часть устройства определения местоположения в пространстве и вторую антенну определения местоположения в пространстве. В некоторых вариантах осуществления внутри первого корпуса можно расположить первый IMU, а внутри второго корпуса можно расположить второй IMU.
[0025] В проиллюстрированном варианте осуществления система 36 управления содержит систему 46 рулевого управления, выполненную с возможностью управления направлением движения автономного сельскохозяйственного транспортного средства 10, и систему 47 управления скоростью, выполненную с возможностью управления скоростью автономного сельскохозяйственного транспортного средства 10, например, посредством дроссельного управления. Система 36 управления дополнительно содержит систему 48 управления силовой передачей, которую можно использовать для регулирования коэффициента полезного действия трансмиссии в системе автономного транспортного средства 10. Кроме того, система 36 управления содержит контроллер 49, который соединен с возможностью обмена данными с устройством 38 определения местоположения в пространстве, с системой 46 рулевого управления и с системой 47 управления скоростью. Контроллер 49 выполнен с возможностью автоматического управления сельскохозяйственным транспортным средством во время определенных фаз сельскохозяйственных работ (например, без ввода оператором данных, с ограниченным вводом оператором данных и т. д.).
[0026] В некоторых вариантах осуществления контроллер 49 представляет собой электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных из устройства 38 определения местоположения в пространстве и/или от других компонентов системы 36 управления. В проиллюстрированном варианте осуществления контроллер 49 содержит процессор, такой как проиллюстрированный микропроцессор 50, и запоминающее устройство 52. Контроллер 49 также может содержать одно или более устройств хранения и/или другие подходящие компоненты. Процессор 50 можно использовать для выполнения программ, таких как программы для управления автономным сельскохозяйственным транспортным средством, программы для определения ориентации транспортного средства, программы для осуществления выполнения протокола обмена данными и так далее. Кроме того, процессор 50 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных схем (ASICS) или какое-либо их сочетание. Например, процессор 50 может содержать один или более процессоров с сокращенным набором команд (RISC).
[0027] Запоминающее устройство 52 может представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (RAM), и/или энергонезависимое запоминающее устройство, такое как постоянное запоминающее устройство (ROM). В запоминающем устройстве 52 можно хранить много информации, и его можно использовать для различных целей. Например, в запоминающем устройстве 52 можно хранить выполняемые процессором команды (например, прошивку или программы) для выполнения процессором 50, такие как команды для управления автономным сельскохозяйственным транспортным средством, команды для определения ориентации транспортного средства, команды для выполнения протоколов обмена данными и так далее. Устройство (устройства) хранения (например, энергонезависимое запоминающее устройство) может включать в себя ROM, флеш-память, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный информационный носитель или их сочетание. В устройстве (устройствах) хранения можно хранить данные (например, данные положения, данные о геометрии транспортного средства и т. д.), команды (например, программы или прошивку для управления автономным сельскохозяйственным транспортным средством и т. д.) и любые другие подходящие данные.
[0028] В некоторых вариантах осуществления система 46 рулевого управления может содержать систему регулирования угла колес, дифференциальную тормозную систему, систему векторизации крутящего момента или их сочетание. Система регулирования угла колес может автоматически поворачивать одно или более колес и/или гусениц автономного сельскохозяйственного транспортного средства (например, посредством гидравлических исполнительных механизмов) для направления автономного сельскохозяйственного транспортного средства по требуемой траектории (например, вдоль направляющего прокоса, по траектории подбора валка и т. д.). В качестве примера, система регулирования угла колес может поворачивать передние колеса/гусеницы, задние колеса/гусеницы и/или промежуточные колеса/гусеницы автономного сельскохозяйственного транспортного средства, либо отдельно, либо группами. Для направления автономного сельскохозяйственного транспортного средства по траектории дифференциальная тормозная система может независимо изменять тормозное усилие с каждой боковой стороны автономного сельскохозяйственного транспортного средства. Аналогично, система векторизации крутящего момента может дифференциально прикладывать крутящий момент от двигателя к колесам и/или гусеницам с каждой боковой стороны автономного сельскохозяйственного транспортного средства, посредством этого направляя автономное сельскохозяйственное транспортное средство по траектории. В дополнительных вариантах осуществления для облегчения направления автономного сельскохозяйственного транспортного средства по траектории по полю система рулевого управления может содержать другие и/или дополнительные системы.
[0029] В некоторых вариантах осуществления система 47 управления скоростью может содержать систему управления мощностью двигателя, систему управления торможением или их сочетание. Система управления мощностью двигателя может изменять мощность двигателя для управления скоростью автономного сельскохозяйственного транспортного средства. Например, система управления мощностью двигателя может изменять настройку дроссельной заслонки двигателя, топливо-воздушную смесь двигателя, синхронизацию двигателя, другие подходящие параметры двигателя для управления мощностью двигателя или их сочетание. Кроме того, система 48 управления силовой передачей может регулировать коэффициент полезного действия трансмиссии для управления скоростью автономного сельскохозяйственного транспортного средства. Кроме того, система управления торможением может регулировать тормозное усилие, посредством этого регулируя скорость автономного сельскохозяйственного транспортного средства. В дополнительных вариантах осуществления система управления скоростью может содержать другие и/или дополнительные системы для облегчения регулирования скорости автономного сельскохозяйственного транспортного средства.
[0030] В некоторых вариантах осуществления система 36 управления также может управлять работой сельскохозяйственного инструмента 14, соединенного с автономным сельскохозяйственным транспортным средством 10. Например, система 36 управления может содержать систему управления инструментом/контроллер инструмента, выполненный с возможностью управления углом поворота инструмента 14 (например, посредством системы рулевого управления инструмента, имеющей систему регулирования угла колес и/или дифференциальную тормозную систему) и/или скоростью автономного сельскохозяйственного транспортного средства/системы инструмента (например, посредством системы управления скоростью инструмента, имеющей систему управления торможением). В некоторых вариантах осуществления контроллер 49 может быть соединен с возможностью обмена данными с различными системами, такими как системы 46, 47, 48, сеть передачи данных, такие как локальная сеть контроллера (CAN-шина). Также показана вспомогательная система 53 управления транспортного средства, подходящая для управления некоторыми вспомогательными системами, такими как электрогидравлические дистанционные устройства (EHR), механизм отбора мощности (PTO), сцепные системы и тому подобное.
[0031] В проиллюстрированном варианте осуществления система 36 управления содержит пользовательский интерфейс 54, соединенный с возможностью обмена данными с контроллером 49. Пользовательский интерфейс 54 выполнен с возможностью позволить оператору управлять (например, стоя рядом с автономным сельскохозяйственным транспортным средством) каким-либо параметром, связанным с работой автономного сельскохозяйственного транспортного средства. Например, пользовательский интерфейс 54 может содержать переключатель, который позволяет оператору конфигурировать автономное сельскохозяйственное транспортное средство для автономного или ручного управления. Кроме того, пользовательский интерфейс 54 среди других органов управления может содержать переключатель выключения аккумулятора, выключатель зажигания двигателя, кнопку остановки или их сочетание. В некоторых вариантах осуществления пользовательский интерфейс 54 содержит дисплей 56, выполненный с возможностью обеспечения оператору информации, такой как графическое представление направляющего прокоса, визуальное представление какого-то параметра (параметров), связанного с работой автономного сельскохозяйственного транспортного средства (например, уровня топлива, давления масла, температуры воды и т. д.), визуальное представление какого-то параметра (параметров), связанного с работой инструмента, соединенного с автономным сельскохозяйственным транспортным средством (например, уровня семян, глубины проникновения грунтозацепных инструментов, ориентации (ориентаций)/положения (положений) некоторых компонентов инструмента и т. д.) или их сочетание, среди другой информации. В некоторых вариантах осуществления дисплей 56 может содержать интерфейс в виде сенсорного экрана, который позволяет оператору управлять некоторыми параметрами, связанными с работой автономного сельскохозяйственного транспортного средства и/или инструмента.
[0032] В проиллюстрированном варианте осуществления система 36 управления содержит систему 60 обмена данными, соединенную с возможностью обмена данными с контроллером 49. В некоторых вариантах осуществления система 60 обмена данными выполнена с возможностью создания канала связи с соответствующей системой 61 обмена данными базовой станции 12, облегчая посредством этого обмен данными между базовой станцией 12 и системой 36 управления автономным сельскохозяйственным транспортным средством. Например, базовая станция 12 может содержать систему 63 управления, имеющую пользовательский интерфейс 62, имеющий дисплей 64, который позволяет удаленному оператору подавать команды контроллеру 66 (например, команды запуска автоматического управления автономным сельскохозяйственным транспортным средством 10, команды направления автономного сельскохозяйственного транспортного средства по траектории, команды передачи данных картирования и т. д.).
[0033] В некоторых вариантах осуществления контроллером 66 системы 63 управления является электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных из системы 68 картирования, имеющей карту 70. В проиллюстрированном варианте осуществления контроллер 66 содержит процессор, такой как проиллюстрированный микропроцессор 72, и запоминающее устройство 74. Контроллер 66 также может содержать одно или более устройств хранения и/или другие подходящие компоненты. Процессор 72 можно использовать для выполнения программ, таких как программы для управления автономным сельскохозяйственным транспортным средством, программы для определения ориентации транспортного средства, программы для выполнения протоколов обмена данными и так далее. Кроме того, процессор 72 может содержать множество микропроцессоров, один или более микропроцессоров «общего назначения», один или более микропроцессоров специального назначения и/или одну или более специализированных интегральных схем (ASICS) или какое-либо их сочетание. Например, процессор 50 может содержать один или более процессоров с сокращенным набором команд (RISC).
[0034] Запоминающее устройство 74 может представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (RAM), и/или энергонезависимое запоминающее устройство, такое как постоянное запоминающее устройство (ROM). Запоминающее устройство 74 может хранить множество информации, и его можно использовать для различных целей. Например, запоминающее устройство 74 может хранить выполняемые процессором команды (например, прошивку или программы) для выполнения процессором 72, такие как команды для управления автономным сельскохозяйственным транспортным средством, команды для определения ориентации транспортного средства, для выполнения протоколов обмена данными и так далее. Устройство (устройства) хранения (например, энергонезависимое запоминающее устройство) может включать в себя ROM, флеш-память, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный информационный носитель или их сочетание. В устройстве (устройствах) хранения можно хранить данные (например, данные положения, данные о геометрии транспортного средства и т. д.), команды (например, программы или прошивку для управления автономным сельскохозяйственным транспортным средством, программы картирования или прошивку и т. д.), и любые другие подходящие данные.
[0035] Системы 60, 61 обмена данными могут работать в любом подходящем частотном диапазоне внутри электромагнитного спектра. Например, в некоторых вариантах осуществления системы 60, 61 обмена данными могут распространять и принимать радиоволны внутри частотного диапазона от приблизительно 1 Гц до приблизительно 10 Гц. Кроме того, системы 60, 61 обмена данными могут использовать любой подходящий протокол обмена данными, такой как стандартный протокол (например, Wi-Fi, Bluetooth и т. д.) или проприетарный протокол.
[0036] В системе 36 управления предусмотрена система 76 протокола обмена данными, а в системе 66 управления предусмотрена система 78 протокола обмена данными, при этом они подходят для выполнения одного или более протоколов обмена данными. Как упоминалось ранее, протокол задержки между базовой станцией и транспортным средством может поддерживать действующую радиосвязь между автономным транспортным средством 10 и базовой станцией 12. Протокол обмена географическими данными может поддерживать географическое ограничение работ. Протокол задержки между контроллером и подсистемами транспортного средства может поддерживать действующий обмен данными между контроллером и некоторыми подсистемами автономного транспортного средства. Кроме того, протокол выхода оператора может обеспечивать возможность выхода оператора-человека из автономного транспортного средства 10, а затем предотвращать повторный запуск автономного транспортного средства 10 до тех пор, пока оператор не будет находиться на требуемом расстоянии (например, вдалеке на базовой станции 12).
[0037] В некоторых вариантах осуществления каждый из протоколов (например, протокол задержки между базовой станцией и транспортным средством, протокол обмена географическими данными, протокол задержки между контроллером и подсистемами транспортного средства, протокол выхода оператора) можно выполнять в системе 36 управления, в системе 63 управления или в обеих. Кроме того, системы 76, 78 протокола обмена данными могут содержать выделенное оборудование, такое как другие процессоры 50, 72, и запоминающие устройства 52, 74, выделенные для выполнения протокола задержки между базовой станцией и транспортным средством, протокола обмена географическими данными, протокола задержки между контроллером и подсистемами транспортного средства и/или протокола выхода оператора.
[0038] На фиг. 3 представлена схема технологического процесса варианта осуществления процесса 100, подходящего для выполнения протокола задержки между базовой станцией и транспортным средством, протокола обмена географическими данными, протокола задержки между контроллером и подсистемами транспортного средства и протокола выхода оператора. Процесс 100 может быть реализован в виде компьютерных команд или кода, хранящегося в запоминающих устройствах 52, 74 и выполняемого процессорами 50, 72. В изображенном примере в процессе 100 можно выполнять (блок 102) протокол обмена географическими данными путем первого получения (блок 104) местоположения автономного транспортного средства 10 и/или одной или более географических границ. Географические границы, например, могут ограждать сельскохозяйственное поле или части поля на карте 70. За счет использования полученного местоположения в процессе 100 можно определить (решение 106), находится ли автономное транспортное средство 10 внутри требуемых местоположений, отмеченных огражденными на карте 70. Если предполагается выход автономного транспортного средства 10 за ограждение, считающееся защитным ограждением, или вход в ограждение, в которое вход запрещен, то в процессе 100 автономное транспортное средство 10 можно перевести в состояние холостого хода и/или выполнить аварийную остановку (блок 108). Также, если определено, что местоположение скачкообразно изменяется («скачет»), что можно определить, когда полученное местоположение изменяется быстрее, чем ожидалось, например, по причине атмосферных условий, спутниковых аномалий и тому подобное, связанных с системой 38 определения местоположения в пространстве, в процессе 100 можно перевести автономное транспортное средство 10 в состояние холостого хода и/или выполнить аварийную остановку (блок 108).
[0039] Аварийная остановка (блок 108) может замедлить автономное транспортное средство, а затем остановить автономное транспортное средство. Однако, если решение 106 определяет, что автономное транспортное средство 10 находится внутри требуемых географических границ и не изменяет своё местоположение скачкообразно, то в процессе 100 можно продолжать (блок 110) обычные операции. В процессе 100 также можно выполнять (блок 112) протокол задержки между базовой станцией и транспортным средством. Например, в процессе 100 можно сперва получить (блок 114) задержку обмена данными между автономным транспортным средством 10 и базовой станцией 12. В изображенном варианте осуществления задержку можно получить (блок 114) путем использования процессов контрольных сигналов или активных соединений. Например, система 60 обмена данными может запрашивать время отклика системы 61 обмена данными или наоборот и рассчитывать запросы по времени. Если запросы не имеют ответа спустя требуемое прошедшее время (например, 3-5 секунд) или считаются слишком медленными, то решение 116 может определить, что задержка обмена данными является неприемлемой. Если задержка является неприемлемой (решение 116), то автономное транспортное средство 10 можно перевести в состояние холостого хода и/или подать команду выполнения аварийной остановки (блок 108), как описано ранее. Если задержка является приемлемой (решение 116), автономное транспортное средство 10 может продолжать (блок 110) обычные работы.
[0040] В процессе 100 также можно выполнять (блок 118) протокол задержки между контроллером и подсистемами транспортного средства. Например, в процессе 100 можно сперва получить (блок 120) задержку обмена данными между контроллером 49 и различными подсистемами, такими как система 46 рулевого управления, система 47 управления скоростью, система 48 управления силовой передачей и так далее, содержащимися в системе 36 управления. Для получения (блок 120) задержки между контроллером 49 и другими системами, содержащими систему 36 управления, контроллер 36 может выполнять процесс контрольных сигналов, получая время приема сообщений между контроллером 49 транспортного средства и системами 46, 47, 48 транспортного средства и тому подобное. В одном варианте осуществления счетчик может накапливать значения, и при требуемом счете количество сообщений, переданных между контроллером 49 и системами 46, 47, 48, можно сравнивать с требуемым количеством. Если количество переданных сообщений меньше, чем требуемое количество, то задержка обмена данными между контроллером 49 и различными системами может быть слишком большой. В других вариантах осуществления для отслеживания времени между посланными/подтвержденными сообщениями можно использовать, например, внутренние часы, а для получения задержки отслеженное время сравнивать с требуемым временем.
[0041] Если задержка обмена данными между контроллером 49 и различными подсистемами считается неприемлемой (решение 122), то автономное транспортное средство 10 можно перевести в состояние холостого хода и/или запросить выполнение аварийной остановки (блок 108). В процессе 100 можно дополнительно выполнять (блок 124) протокол выхода оператора. Для выполнения (блок 124) протокола выхода оператора в процессе 100 можно дать знать или сообщить, что оператор сейчас выходит из автономного транспортного средства 10. Например, оператор может ввести, что оператор сейчас выходит через пользовательский интерфейс 54. В качестве дополнения или альтернативы, для вывода о том, что оператор выходит из автономного транспортного средства 10, можно использовать датчик приближения, или можно использовать радиопередатчик-брелок или аналогичное устройство для определения, что радиопередатчик-брелок более не находится в автономном транспортном средстве 10. Оператор также может носить метку радиочастотной идентификации, носить сотовый телефон, осуществляющий передачу на определенных частотах, или носить другое устройство подачи сигналов, используемое для обозначения близости оператора к автономному транспортному средству 10. В качестве дополнения или альтернативы, в процессе 100 можно включить таймер обратного отсчета (например, счетчик 10 секунд), может быть когда оператор выходит из автономного транспортного средства 10. Когда местоположение оператора считается приемлемым, и/или таймер обратного отсчета достигает нуля, в автономном транспортном средстве 10 можно запустить некоторые системы.
[0042] При том, что в данном документе были проиллюстрированы и описаны лишь некоторые признаки изобретения, специалистами в данной области техники будет предусмотрено множество модификаций и изменений. Вследствие этого, следует понимать, что прилагаемая формула изобретения подразумевает охват всех таких модификаций и изменений, которые находятся в пределах истинной сущности изобретения.
Изобретение относится к системе и способу обмена данными для автономного транспортного средства. Система обмена данными для автономного транспортного средства содержит систему обмена данными с базовой станцией и систему управления. Система управления соединена с возможностью обмена данными с системой обмена данными. Система управления содержит процессор. Процессор системы управления выполненный с возможностью приема управляющих команд от базовой станции, выполнения управляющих команд для управления автономным транспортным средством и выполнения протокола задержки между контроллером и подсистемами транспортного средства для определения задержки обмена данными между контроллером транспортного средства и подсистемами транспортного средства и для остановки автономного транспортного средства, если задержка обмена данными превышает устанавливаемое пользователем значение задержки. Контроллер транспортного средства и подсистема транспортного средства размещены в автономном транспортном средстве. Достигается повышение безопасности управления автономным транспортным средством. 2 н. и 13 з.п. ф-лы. 3 ил.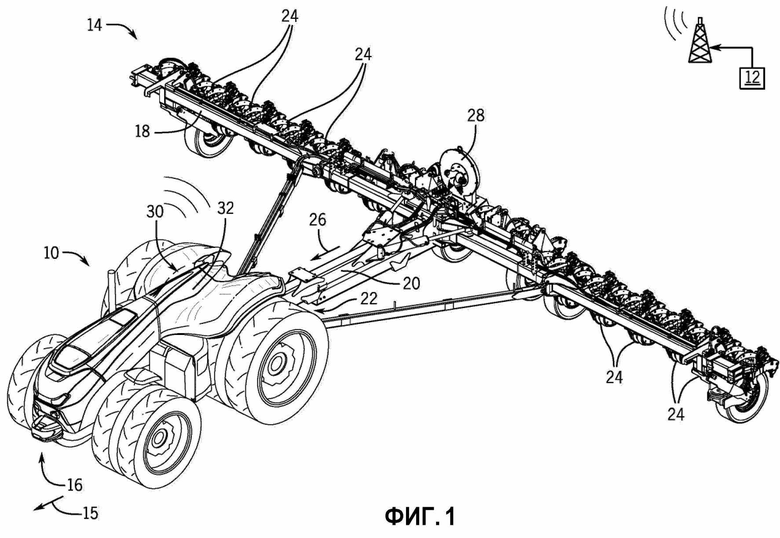
1. Система обмена данными для автономного транспортного средства, содержащая:
систему (60) обмена данными, выполненную с возможностью обмена данными с базовой станцией (12);
систему (36) управления, соединенную с возможностью обмена данными с системой (60) обмена данными, причем система (36) управления содержит процессор (50), выполненный с возможностью:
приема управляющих команд от базовой станции (12);
выполнения управляющих команд для управления автономным транспортным средством (10); и
выполнения (118) протокола задержки между контроллером и подсистемами транспортного средства для определения задержки обмена данными между контроллером (49) транспортного средства и подсистемами транспортного средства (10) и для остановки автономного транспортного средства (10), если задержка обмена данными превышает устанавливаемое пользователем значение задержки, при этом контроллер (49) транспортного средства и подсистема транспортного средства (10) размещены в автономном транспортном средстве (10).
2. Система по п. 1, в которой процессор (50) выполнен с возможностью выполнения (118) протокола задержки между контроллером и подсистемами транспортного средства путем выполнения процесса контрольных сигналов с получением времени приема сообщений между контроллером (49) транспортного средства и подсистемами транспортного средства (10).
3. Система по любому из предыдущих пунктов, в которой процессор (50) выполнен с возможностью выполнения (112) протокола задержки между базовой станцией и транспортным средством для определения второй задержки обмена данными между автономным транспортным средством (10) и базовой станцией (12), и остановки автономного транспортного средства (10), если вторая задержка обмена данными превышает устанавливаемое пользователем значение второй задержки.
4. Система по любому из предыдущих пунктов, в которой процессор (50) выполнен с возможностью выполнения (112) протокола задержки между базовой станцией и транспортным средством путем выполнения второго процесса контрольных сигналов с синхронизацией приема сообщений между системой (60) обмена данными и базовой станцией (12).
5. Система по любому из предыдущих пунктов, в которой автономное транспортное средство (10) содержит CAN-шину, соединяющую с возможностью обмена данными контроллер (49) транспортного средства и подсистемы транспортного средства (10).
6. Система по любому из предыдущих пунктов, в которой подсистемы транспортного средства (10) содержат систему (46) рулевого управления, дроссельную систему, систему силовой передачи или их сочетание.
7. Система по любому из предыдущих пунктов, в которой процессор (50) выполнен с возможностью выполнения (124) протокола выхода оператора после выхода оператора из транспортного средства (10) для остановки работ автономного транспортного средства (10).
8. Система по п. 7, в которой процессор (50) выполнен с возможностью выполнения (124) протокола выхода оператора с помощью процесса синхронизации, с помощью процесса обнаружения оператора или их сочетания.
9. Система по любому из предыдущих пунктов, в которой автономное транспортное средство (10) содержит систему (38) определения местоположения в пространстве, выполненную с возможностью получения географического местоположения автономного транспортного средства (10), при этом процессор (50) выполнен с возможностью выполнения (102) протокола обмена географическими данными, выполненного с возможностью остановки автономного транспортного средства, если автономное транспортное средство находится за пределами географической области, или если географическое местоположение скачкообразно изменяется.
10. Способ обмена данными для автономного транспортного средства, содержащий этапы, на которых:
передают управляющие команды от базовой станции (12);
выполняют управляющие команды для управления автономным транспортным средством (10); и
выполняют (118) протокол задержки между контроллером и подсистемами транспортного средства для определения задержки обмена данными между контроллером (49) транспортного средства и подсистемами транспортного средства и для остановки автономного транспортного средства (10), если задержка обмена данными превышает устанавливаемое пользователем значение задержки, при этом контроллер (49) транспортного средства и подсистема транспортного средства размещены в автономном транспортном средстве (10).
11. Способ по п. 10, содержащий этап, на котором выполняют (112) протокол задержки между базовой станцией и транспортным средством для определения второй задержки обмена данными между автономным транспортным средством (10) и базовой станцией (12) и для остановки автономного транспортного средства (10), если вторая задержка обмена данными превышает устанавливаемое пользователем значение второй задержки.
12. Способ по п. 10 или 11, в котором выполнение (112) протокола задержки между базовой станцией и транспортным средством содержит этапы, на которых используют процессор (72) базовой станции для выполнения протокола задержки между базовой станцией и транспортным средством, используют процессор (50) транспортного средства для выполнения протокола задержки между базовой станцией и транспортным средством или их сочетания.
13. Способ по п. 10, 11 или 12, в котором выполнение (118) протокола задержки между контроллером и подсистемами транспортного средства содержит этап, на котором выполняют процесс контрольных сигналов с получением времени приема сообщений между контроллером (49) транспортного средства и подсистемами транспортного средства.
14. Способ по п. 10, 11, 12 или 13, содержащий этап, на котором выполняют (124) протокол выхода оператора посредством процессора (50) автономного транспортного средства после выхода оператора из транспортного средства (10) для остановки работ автономного транспортного средства (10).
15. Способ по п. 10, 11, 12, 13 или 14, содержащий этап, на котором получают посредством системы (38) определения местоположения в пространстве, находящейся в автономном транспортном средстве (10), географическое местоположение автономного транспортного средства (10) и выполняют (102) протокол обмена географическими данными, выполненный с возможностью остановки автономного транспортного средства (10), если автономное транспортное средство (10) находится за пределами географической области, или если географическое местоположение скачкообразно изменяется.
| US 8947522 B1, 03.02.2015 | |||
| Колосоуборка | 1923 |
|
SU2009A1 |
| СИСТЕМЫ И СПОСОБЫ ДЛЯ ДИСТАНЦИОННО ВЗАИМОДЕЙСТВУЮЩИХ ТРАНСПОРТНЫХ СРЕДСТВ | 2010 |
|
RU2564628C2 |

