Ссылка на родственную заявку
В настоящей заявке испрашивается приоритет по заявке на патент США 15/179597, озаглавленной «АВТОМАТИЧЕСКОЕ МАСШТАБИРОВАНИЕ РЯДОВ ДВИЖЕНИЯ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА», поданной 10 июня 2016 года, которая включена сюда путем ссылки в полном объеме.
Уровень техники
Настоящее изобретение в общем относится к автоматическому масштабированию рядов движения для внедорожного транспортного средства.
Внедорожные транспортные средства, такие как сельскохозяйственные тракторы, можно эксплуатировать в самых разных местах. Например, трактор можно использовать для скашивания полос в рядах в поле. Например, трактор может буксировать орудие, которое косит траву, подлежащую уборке на сено. Однако ширина поля может быть не равна целому числу, кратному ширине полосы, скашиваемой трактором. Полосы, как правило, скашивают рядами, имеющими ширину, равную ширине орудия для скашивания полосы, которое буксирует трактор, за один проход, но такие пути скашивания могут приводить к появлению последнего ряда, который имеет ширину, которая значительно меньше, чем ширина полосы скашивания. Последний, частичный ряд, имеющий ширину, которая значительно меньше, чем ширина полосы скашивания, может быть относительно сложно или невозможно скашивать без скашивания также других участков поля (например, рядков, которые обеспечивают высыхание урожая, такого как сено), которые обычно не скашивают. Кроме того, скашивание таких участков может быть затруднено для машинного оборудования. Например, повторно скошенные полосы могут потенциально затруднять дальнейшую обработку за счет закупорки или засорения машинного оборудования. Кроме того, дополнительное скашивание полосы может привести к более частому техническому обслуживанию, которое может быть дорогостоящими и значительно трудоемкими, тем самым снижая эффективность полевых операций.
Раскрытие изобретения
В одном варианте осуществления система управления для внедорожного транспортного средства содержит запоминающее устройство, хранящее команды и процессор, выполненный с возможностью выполнения команд, заставляющих процессор определять, отличается ли первый контур первого края поля от второго контура второго края поля, находящегося на противоположной стороне поля от первого края. Команды также сконфигурированы так, чтобы заставлять процессор, если первый контур отличается от второго контура, определять заранее спланированный маршрут движения по полю внедорожного транспортного средства. Заранее спланированный маршрут содержит первый проход внедорожного транспортного средства, которое следует за первым контуром на первом краю и последующие проходы внедорожного транспортного средства для постепенного перемещения от первого контура ко второму контуру, используя частичные перекрытия проходов орудия, буксируемого или встроенного во внедорожное транспортное средство. Заранее спланированный маршрут также содержит последний проход внедорожного транспортного средства, которое следует за вторым контуром на втором краю. Команды также сконфигурированы так, чтобы заставлять процессор управлять прохождением внедорожного транспортного средства по полю по меньшей мере частично на основании заранее спланированного маршрута.
В другом варианте осуществления система управления для внедорожного транспортного средства содержит запоминающее устройство, хранящее команды и процессор, выполненный с возможностью выполнения команд. Команды сконфигурированы так, чтобы заставлять процессор определять, равна ли ширина поля не целому числу, кратному ширине полосы орудия, и если ширина поля не равна целому числу, кратному ширине полосы, определять маршрут для создания перекрытия проходов рядов так, чтобы ширина поля была равна целому числу, кратному частям без перекрытия каждого прохода. Команды также сконфигурированы так, чтобы заставлять процессор управлять прохождением внедорожного транспортного средства по полю по меньшей мере частично на основании маршрута.
В другом варианте осуществления способ управления внедорожным транспортным средством на поле включает отображение карты поля посредством процессора, используя устройство для определения местоположения в пространстве внедорожного транспортного средства. Способ также включает определение посредством процессора с помощью данных карты, равна ли ширина поля не целому числу, кратному ширине полосы орудия. Способ дополнительно включает, если ширина поля не равна целому числу, кратному ширине полосы, определение посредством процессора маршрута для создания перекрытия проходов рядов, так чтобы ширина поля была равна целому числу, кратному частям без перекрытия каждого прохода. Кроме того, способ включает управление посредством процессора прохождением внедорожного транспортного средства по полю по меньшей мере частично на основании маршрута.
Краткое описание чертежей
Эти и другие признаки, аспекты и преимущества настоящего изобретения станут более понятными при прочтении последующего подробного описания со ссылкой на прилагаемые чертежи, на которых аналогичными позициями обозначены аналогичные элементы на чертежах и на которых:
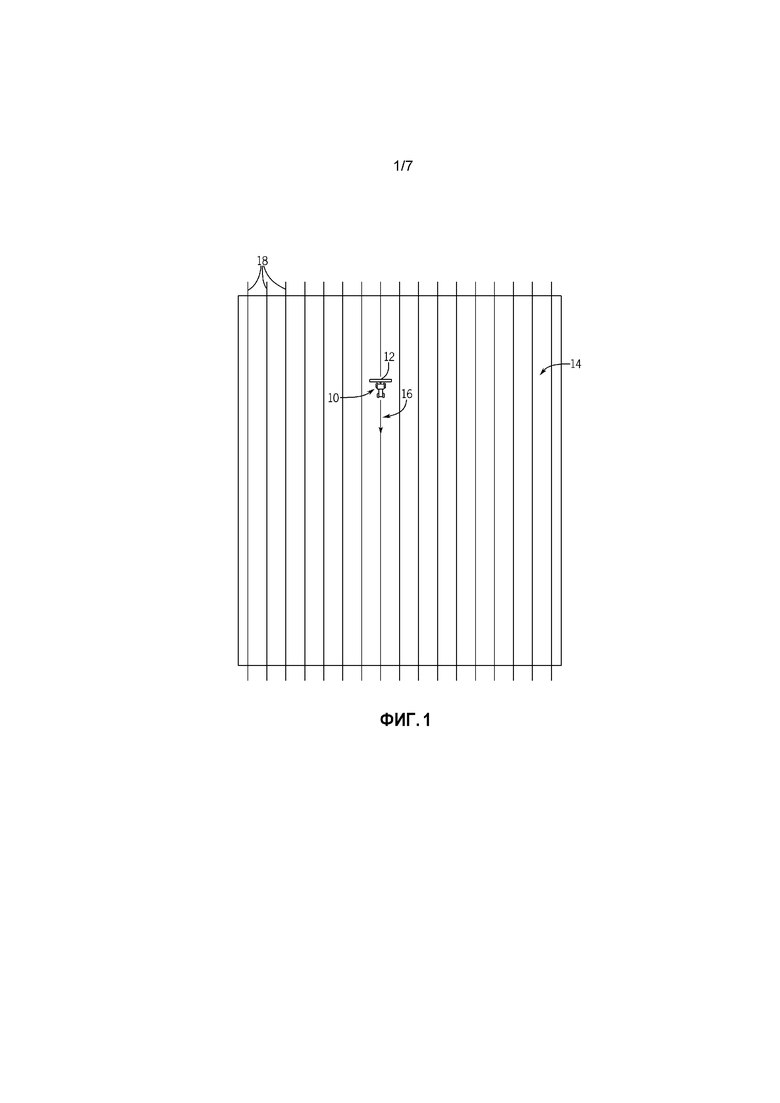
На ФИГ. 1 представлена принципиальная схема варианта осуществления внедорожного транспортного средства и сельскохозяйственного орудия в пределах сельскохозяйственного поля;
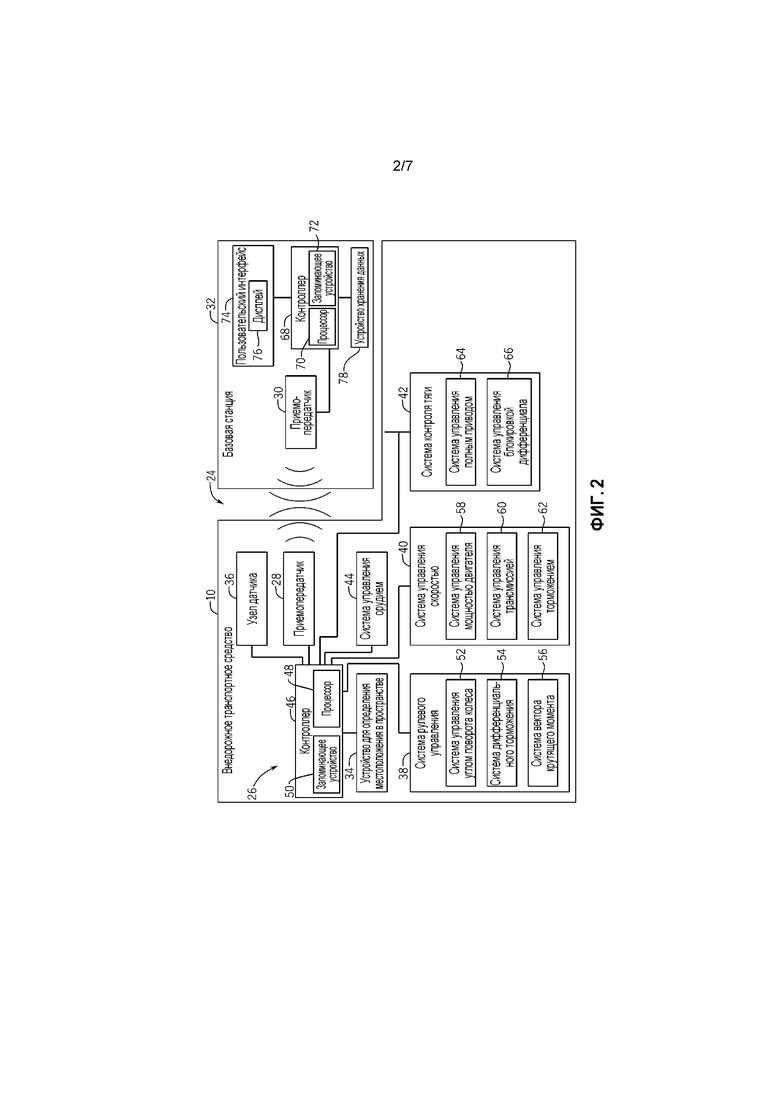
На ФИГ. 2 представлена принципиальная схема варианта осуществления системы управления, которую можно использовать для управления внедорожным транспортным средством и сельскохозяйственным орудием ФИГ. 1 в поле ФИГ. 1;
На ФИГ. 3 представлена схема варианта осуществления поля, имеющего острый угол с противоположными краями, имеющими отличия контуров;
На ФИГ. 4 представлена схема варианта осуществления маршрута по полю ФИГ. 3, который позволяет обрабатывать ряды по краям поля;
На ФИГ. 5 представлена схема варианта осуществления поля, имеющего оставшийся частичный ряд после прохождения орудия без перекрытия последующих проходов орудия;
На ФИГ. 6 представлена схема поля ФИГ. 5, которое орудие проходит по варианту осуществления маршрута, который заставляет орудие перекрывать проходы, чтобы исключить частичный ряд ФИГ. 5; и
На ФИГ. 7 представлена блок-схема варианта осуществления способа управления внедорожным транспортным средством на поле.
Подробное описание изобретения
На ФИГ. 1 представлена принципиальная схема варианта осуществления внедорожного транспортного средства 10 и сельскохозяйственного орудия 12 в сельскохозяйственном поле 14. Внедорожное транспортное средство 10 (например, трактор или другой тягач) выполнен с возможностью буксирования сельскохозяйственного орудия 12 по всему полю 14 вдоль направления движения 16. В некоторых вариантах осуществления прохождение внедорожного транспортного средства 10 по полю направляют (например, посредством оператора или автоматизированной системы) вдоль по существу параллельных рядов 18. Однако следует понимать, что в альтернативных вариантах осуществления прохождение внедорожного транспортного средства по полю можно направлять по другим маршрутам. Например, по меньшей мере часть путей может следовать за контуром, расположенным на одном краю поля 14, который итеративно учитывают или не учитывают чтобы, сформировать путь, следующий за линией или контуром, расположенным на противоположном краю поля.
Как будет понятно, сельскохозяйственное орудие 12 может быть любым подходящим орудием для выполнения сельскохозяйственных работ по всему полю 14. Например, в некоторых вариантах осуществления сельскохозяйственное орудие 12 среди прочего может быть почвообрабатывающим орудием, инструментом для внесения удобрений, посевным или посадочным орудием, режущим инструментом или орудием для сбора урожая. Хотя в проиллюстрированном варианте осуществления сельскохозяйственное орудие 12 буксирует и/или толкает внедорожное транспортное средство 10, следует понимать, что в альтернативных вариантах осуществления сельскохозяйственное орудие может быть встроено во внедорожное транспортное средство 10.
Кроме того, поле 14 может иметь ширину, которая не равна целому числу, кратному ширине полосы орудия 12. Другими словами, если поле 14 проходят, используя параллельные ряды 18, имеющие ширину, равную ширине работы орудия, образуется последний частичный ряд, который равен только части ширины других рядов 18. Такие частичные ряды могут быть сложными для прохождения без создания нежелательных эффектов для других частей поля 14. Например, если скашиваемая культура является травой для сена, скашивание частичного ряда может быть сложно или невозможно для завершения без скашивания крайних полос поля 14. Как отмечено выше, повторное скашивание крайних полос может потенциально затруднить дальнейшую обработку за счет закупорки или засорения и/или более частых работ по техническому обслуживанию, которые могут быть дорогостоящими и значительно трудоемкими, тем самым снижая эффективность полевых операций.
На ФИГ. 2 представлена принципиальная схема варианта осуществления системы 24 управления, которую можно использовать для управления внедорожным транспортным средством 10 и сельскохозяйственным орудием ФИГ. 1. В проиллюстрированном варианте осуществления система 24 управления содержит систему 26 управления транспортным средством (например, установленную во внедорожном транспортном средстве 10), а внедорожное транспортное средство 10 содержит первый приемопередатчик 28, выполненный с возможностью установления линии беспроводной связи со вторым приемопередатчиком 30 базовой станции 32. Как будет понятно, первый и второй приемопередатчики могут работать в любом подходящем диапазоне частот в пределах электромагнитного спектра. Например, в некоторых вариантах осуществления приемопередатчики могут передавать и принимать радиоволны в диапазоне частот от примерно 1 ГГц до примерно 10 ГГц. Кроме того, первый и второй приемопередатчики могут использовать любой подходящий протокол связи, такой как стандартный протокол (например, Wi-Fi, Bluetooth и т. д.) или собственный протокол.
В проиллюстрированном варианте осуществления внедорожное транспортное средство 10 содержит устройство 34 для определения местоположения в пространстве, которое установлено во внедорожном транспортном устройстве 10 и выполнено с возможностью определения положения внедорожного транспортного средства 10. Как будет понятно, устройство для определения местоположения в пространстве может содержать любую подходящую систему, выполненную с возможностью определения положения внедорожного транспортного средства, такую как приемник глобальной системы позиционирования (GPS), например. В некоторых вариантах осуществления устройство 34 для определения местоположения может быть выполнено с возможностью определения положения внедорожного транспортного средства относительно фиксированной точки в пределах поля (например, посредством фиксированного радиоприемопередатчика). Соответственно, устройство 34 для определения местоположения в пространстве может быть выполнено с возможностью определения положения внедорожного транспортного средства относительно фиксированной глобальной системы координат (например, посредством GPS) или фиксированной локальной системы координат. В некоторых вариантах осуществления первый приемопередатчик 28 выполнен с возможностью передачи сигнала, указывающего положение внедорожного транспортного средства 10, приемопередатчику 30 базовой станции 32. Используя положение внедорожного транспортного средства 10 во время прохождения поля 14, может быть сделана карта поля 14. Например, по мере того, как внедорожное транспортное средство 10 или другое более легкое отслеживающее транспортное средство передвигается по части поля 14, система 24 управления и/или система 26 управления транспортным средством могут создавать карту поля 14. В частности, в некоторых вариантах осуществления внедорожное транспортное средство 10 или отслеживающее транспортное средство могут быть направлены для передвижения по периметру поля 14 для определения внешних границ поля 14, а затем для определения маршрута прохождения. Дополнительно или альтернативно, карта может обновляться во время работы внедорожного транспортного средства 10 для хранения местоположения объектов, которые мешают работе, таких как дороги, сооружения, приспособления (например, ирригационные системы) или другие объекты, которые могут быть установлены в пределах поля 14.
Кроме того, внедорожное транспортное средство 10 содержит узел 36 датчика. В некоторых вариантах осуществления узел датчика выполнен с возможностью облегчения определения состояния внедорожного транспортного средства 10 и/или поля 14. Например, узел 36 датчика может включать в себя множество датчиков (например, инфракрасные датчики, ультразвуковые датчики, магнитные датчики и т. д.), выполненные с возможностью мониторинга скорости вращения соответствующего колеса или гусеницы и/или скорости движения внедорожного транспортного средства. Датчики также могут отслеживать рабочие уровни (например, температуру, уровень топлива и т. д.) внедорожного транспортного средства 10. Кроме того, датчики могут отслеживать условия в поле и вокруг него, такие как температура, погода, скорость ветра, влажность, объекты в поле и другие подобные условия.
В проиллюстрированном варианте осуществления внедорожное транспортное средство 10 содержит систему 38 рулевого управления, выполненную с возможностью управления направлением движения внедорожного транспортного средства 10, и систему 40 управления скоростью, выполненную с возможностью управления скоростью внедорожного транспортного средства 10. Кроме того, внедорожное транспортное средство 10 содержит систему 42 контроля тяги, выполненную с возможностью управления распределением мощности от двигателя внедорожного транспортного средства к колесам или гусеницам внедорожного транспортного средства, и систему 44 управления орудием, выполненную с возможностью управления работой орудия (например, которое буксирует внедорожное транспортное средство 10). Кроме того, система 26 управления транспортным средством содержит контроллер 46, коммуникативно связанный с первым приемопередатчиком 28, с устройством 34 для определения местоположения в пространстве, с узлом 36 датчика, с системой 38 рулевого управления, с системой 40 управления скоростью, с системой 42 контроля тяги и системой 44 управления орудием. В некоторых вариантах осуществления контроллер 46 выполнен с возможностью получения данных о местоположении внедорожного транспортного средства 10 и перемещения транспортного средства по меньшей мере частично на основании местоположения внедорожного транспортного средства 10 и маршрута прохождения по полю 14.
В некоторых вариантах осуществления контроллер 46 представляет собой электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных от приемопередатчика 28, устройства 34 для определения местоположения в пространстве, узла 36 датчика или их комбинации среди других компонентов внедорожного транспортного средства 10. В проиллюстрированном варианте осуществления контроллер 46 содержит процессор, такой как проиллюстрированный микропроцессор 48, и запоминающее устройство 50. Контроллер 46 может также включать в себя одно или несколько устройств хранения данных и/или других подходящих компонентов. Процессор 48 можно использовать для выполнения программного обеспечения, такого как программное обеспечение для управления внедорожным транспортным средством 10 и т. д. Более того, процессор 48 может включать в себя несколько микропроцессоров, один или несколько микропроцессоров общего назначения, один или несколько микропроцессоров специального назначения и/или одну или несколько специализированных интегральных схем (ASICS) или их комбинацию. Например, процессор 48 может включать в себя один или несколько процессоров с сокращенным набором команд (RISC).
Запоминающее устройство 50 может представлять собой энергозависимое запоминающее устройство, такое как оперативное запоминающее устройство (ОЗУ) и/или энергонезависимое запоминающее устройство, такое как постоянное запоминающее устройство (ПЗУ). Запоминающее устройство 50 может хранить разнообразную информацию и может использоваться для различных целей. Например, запоминающее устройство 50 может хранить исполняемые процессором команды (например, прошивку или программное обеспечение) для процессора 48 для выполнения, например, команды для управления внедорожным транспортным устройством 10. Устройство (устройства) хранения данных (например, энергонезависимое хранилище) может представлять собой ПЗУ, флэш-память, жесткий диск или любой другой подходящий оптический, магнитный или твердотельный носитель данных или их комбинацию. Устройство (устройства) хранения данных может хранить данные (например, карты полей), команды (например, программное обеспечение или прошивку для управления внедорожным транспортным средством и т. д.) и любые другие подходящие данные.
В проиллюстрированном варианте осуществления система 38 рулевого управления содержит систему 52 управления углом поворота колеса, систему 54 дифференциального торможения и систему 56 вектора крутящего момента. Система 52 управления углом поворота колеса может автоматически вращать одно или несколько колес или гусениц (например, посредством гидравлических приводов) для управления внедорожным транспортным средством по траектории по полю (например, вокруг отображаемых объектов в поле). В качестве примера система 52 управления углом поворота колеса может вращать передние колеса/гусеницы, задние колеса/гусеницы и/или промежуточные колеса/гусеницы внедорожного транспортного средства, индивидуально или группами. Система 54 дифференциального торможения может независимо изменять тормозное усилие на каждой боковой стороне внедорожного транспортного средства, чтобы направлять внедорожное транспортное средство по траектории по полю. Аналогично, система 56 вектора крутящего момента может дифференциально применять крутящий момент от двигателя к колесам и/или гусеницам на каждой боковой стороне внедорожного транспортного средства, тем самым направляя внедорожное транспортное средство по траектории по полю. Хотя проиллюстрированная система 38 рулевого управления содержит систему 52 управления углом поворота колеса, систему 54 дифференциального торможения и систему 56 вектора крутящего момента, следует понимать, что альтернативные варианты осуществления могут включать одну или несколько из этих систем в любой подходящей комбинации. Другие варианты осуществления могут включать в себя систему 38 рулевого управления, имеющую другие и/или дополнительные системы для облегчения направления внедорожного транспортного средства по траектории по полю (например, шарнирную систему рулевого управления и т. д.).
В проиллюстрированном варианте осуществления система 40 управления скоростью содержит систему 58 управления мощностью двигателя, систему 60 управления трансмиссией и систему 62 управления торможением. Система 58 управления мощностью двигателя выполнена с возможностью изменения мощности двигателя для управления скоростью внедорожного транспортного средства 10. Например, система 58 управления мощностью двигателя может изменять настройку дроссельной заслонки двигателя, топливно-воздушной смеси двигателя, синхронизации двигателя и/или других подходящих параметров двигателя для управления мощностью двигателя или их комбинацию. Кроме того, система 60 управления трансмиссией может регулировать коэффициент полезного действия в пределах трансмиссии для управления скоростью внедорожного транспортного средства. Кроме того, система 62 управления торможением может регулировать тормозное усилие, тем самым регулируя скорость внедорожного транспортного средства 10. Хотя проиллюстрированная система 40 управления скоростью содержит систему 58 управления мощностью двигателя, систему 60 управления трансмиссией и систему 62 управления торможением, следует понимать, что альтернативные варианты осуществления могут включать одну или две из этих систем в любой подходящей комбинации. Другие варианты осуществления могут включать в себя систему 40 управления скоростью, имеющую другие и/или дополнительные системы, чтобы облегчить регулирование скорости внедорожного транспортного средства.
В проиллюстрированном варианте осуществления система 42 контроля тяги содержит систему 64 управления полным приводом и систему 66 управления блокировкой дифференциала. Система 64 управления полным приводом выполнена с возможностью избирательного включения и выключения системы полного привода внедорожного транспортного средства. Например, в некоторых вариантах осуществления внедорожное транспортное средство может включать в себя систему полного привода, выполненную с возможностью, чтобы направлять мощность двигателя к задним колесам/гусеницам при выключении и направлять мощность двигателя к передним колесам/гусеницам и задним колесам/гусеницам при включении. В таких вариантах осуществления система 64 управления полным приводом может выборочно давать команды системе полного привода включаться и выключаться для контроля тяги внедорожного транспортного средства. В некоторых вариантах осуществления внедорожное транспортное средство может включать в себя промежуточные колеса/гусеницы, расположенные между передними колесами/гусеницами и задними колесами/гусеницами. В таких вариантах осуществления система управления полным приводом может также управлять передачей мощности двигателя к промежуточным колесам/гусеницам.
Кроме того, система 66 управления блокировкой дифференциала выполнена с возможностью избирательного включения системы блокировки дифференциала по меньшей мере одного блокирующего дифференциала между соответствующей парой колес/гусениц. Например, в некоторых вариантах осуществления блокирующий дифференциал расположен между задними колесами/гусеницами и выполнен с возможностью передачи мощности двигателя к задним колесам/гусеницам. В то время как система блокировки дифференциала отключена, дифференциал разблокирован. В результате скорость вращения одного заднего колеса/гусеницы может изменяться относительно скорости вращения другого заднего колеса/гусеницы. Однако, когда система блокировки дифференциала включена, дифференциал заблокирован. В результате скорости вращения задних колес/гусениц могут быть по существу равны друг другу. В некоторых вариантах осуществления блокирующий дифференциал может быть расположен между передними колесами/гусеницами и/или между промежуточными колесами/гусеницами. В некоторых вариантах осуществления система 66 управления блокировкой дифференциала выполнена с возможностью независимого включения и выключения системы блокировки дифференциала каждого блокирующего дифференциала. Хотя проиллюстрированная система 42 контроля тяги содержит систему 64 управления полным приводом и систему 66 управления блокировкой дифференциала, следует понимать, что альтернативные варианты осуществления могут включать только одну из этих систем. Другие варианты осуществления могут включать в себя систему 42 контроля тяги, имеющую другие и/или дополнительные системы для облегчения контроля тяги внедорожного транспортного средства 10.
Система 44 управления орудием выполнена с возможностью управления различными параметрами сельскохозяйственного орудия, которое буксирует внедорожное транспортное средство. Например, в некоторых вариантах осуществления система 44 управления орудием может быть выполнена с возможностью подачи команд контроллеру орудия (например, посредством линии связи, такой как CAN-шина или ISOBUS) для регулировки глубины проникновения по меньшей мере одного контактирующего с землей инструмента сельскохозяйственного орудия. В качестве примера система 44 управления орудием может подавать команду контроллеру орудия уменьшения глубины проникновения каждого резца для обработки почвы на почвообрабатывающем орудии, или система 44 управления орудием может подавать команду контроллеру орудия убрать скашивающий диск/лезвие посевного/посадочного орудия из почвы. Уменьшение глубины проникновения по меньшей мере одного контактирующего с землей инструмента сельскохозяйственного орудия может уменьшить тяговую нагрузку на внедорожное транспортное средство. Кроме того, система 44 управления орудием может подавать контроллеру орудия команду перевода сельскохозяйственного орудия между рабочим положением и транспортировочным, регулировки скорости выпуска продукта из сельскохозяйственного орудия или регулировки положения жатки сельскохозяйственного орудия (например, уборочного комбайна и т. д.), среди других операций.
В некоторых вариантах осуществления контроллер 46 транспортного средства может непосредственно регулировать глубину проникновения по меньшей мере одного контактирующего с землей инструмента сельскохозяйственного орудия. Например, контроллер 46 внедорожного транспортного средства может подавать трехточечному навесному устройству (например, посредством контроллера трехточечного навесного устройства) команду подъема и опускания сельскохозяйственного орудия или части сельскохозяйственного орудия относительно поверхности почвы, тем самым регулируя глубину проникновения по меньшей мере одного контактирующего с землей инструмента сельскохозяйственного орудия.
Кроме того, контроллер 46 внедорожного транспортного средства может подавать команду гидравлической системе управления регулировки давления гидравлической жидкости и/или потока на один или несколько приводов на сельскохозяйственном орудии, тем самым регулируя глубину проникновения соответствующего контактирующего с землей инструмента (инструментов). В некоторых вариантах осуществления контроллер 46 транспортного средства может подавать команды другому рабочему машинному оборудованию орудия (например, режущему машинному оборудованию), когда начать и когда прекратить работу.
Как обсуждалось ранее, внедорожное транспортное средство 10 выполнено с возможностью связи с базовой станцией 32 посредством приемопередатчиков 28 и 30. В проиллюстрированном варианте осуществления базовая станция содержит контроллер 68, коммуникативно связанный с приемопередатчиком 30 базовой станции. Контроллер 68 выполнен с возможностью подачи команд и/или данных внедорожному транспортному средству 10. Например, как подробно описано ниже, контроллер 68 может быть выполнен с возможностью определения карты поля и/или маршрута контроллера 46 транспортного средства по полю, тем самым позволяя контроллеру транспортного средства направлять транспортное средство по полю 14. Кроме того, контроллер 68 может подавать команды запуска и остановки в контроллер 46 транспортного средства, и/или контроллер 68 может давать команды внедорожному транспортному средству следовать выбранному/спланированному пути по полю 14, основываясь на карте и местоположении транспортного средства 10, которое может быть определено в контроллере 46 и/или контроллере 68.
В некоторых вариантах осуществления контроллер 68 представляет собой электронный контроллер, имеющий электрическую схему, выполненную с возможностью обработки данных от некоторых компонентов базовой станции 32 (например, приемопередатчика 30). В проиллюстрированном варианте осуществления контроллер 68 содержит процессор, такой как проиллюстрированный микропроцессор 70, и запоминающее устройство 72. Процессор 68 можно использовать для выполнения программного обеспечения, такого как программное обеспечение для предоставления команд и/или данных для контроллера 46 внедорожного транспортного средства и т. д. Кроме того, процессор 48 может включать в себя несколько микропроцессоров, один или несколько микропроцессоров общего назначения, один или несколько микропроцессоров специального назначения и/или одну или несколько специализированных интегральных схем (ASICS) или их комбинацию. Например, процессор 70 может включать в себя один или несколько процессоров с сокращенным набором команд (RISC). Запоминающее устройство 72 может представлять собой энергозависимое запоминающее устройство, такое как ОЗУ, и/или энергонезависимое запоминающее устройство, такое как ПЗУ. Запоминающее устройство 72 может хранить разнообразную информацию и может использоваться для различных целей. Например, запоминающее устройство 72 может хранить исполняемые процессором команды (например, прошивку или программное обеспечение) для процессора 70 для выполнения, например, команды для предоставления команд и/или данных контроллеру 46 внедорожного транспортного средства.
В проиллюстрированном варианте осуществления базовая станция 32 содержит пользовательский интерфейс 74, коммуникативно связанный с контроллером 68. Пользовательский интерфейс 74 выполнен с возможностью представления данных от одного или нескольких внедорожных транспортных средств и/или сельскохозяйственных орудий оператору (например, данных, связанных с работой внедорожного транспортного средства, данных, связанных с работой сельскохозяйственного орудия и т. д.). Пользовательский интерфейс 74 может также позволить пользователю вводить информацию о поле 14 и/или культурах, которые могут изменять маршрут по полю. Например, если культура является пропашной культурой (например, кукурузой), оператор может указать такую информацию, и ширина каждой полосы может быть исправлена. Однако, если культура представляет собой не пропашную культуру (например, сено; мелкие зерновые, такие как пшеница, ячмень, семена трав, рапс и т. д.); зернобобовые (горох, чечевица и т. д.)), информация может быть введена, а ширину каждой полосы можно использовать для прохождения поля 14 по траектории, альтернативной рядам, которые были бы использованы для пропашных культур, поскольку полосы не пропашных культур можно регулировать без вмешательства в операции с рядами. Пользовательский интерфейс 74 также выполнен с возможностью обеспечения управления оператором определенными функциями внедорожного транспортного средства (например, запуском и остановкой внедорожного транспортного средства, указанием внедорожному транспортному средству следовать маршруту по полю и т. д.). В проиллюстрированном варианте осуществления пользовательский интерфейс содержит дисплей 76, выполненный с возможностью представления информации оператору, такой как положение внедорожного транспортного средства 10 в поле, скорость внедорожного транспортного средства и траектория внедорожного транспортного средства, среди других данных. Дисплей 76 может включать в себя сенсорный ввод, и/или пользовательский интерфейс может использовать другие устройства ввода, такие как клавиатура, мышь или другие устройства ввода от человека к машине. Кроме того, пользовательский интерфейс 74 (например, посредством дисплея 76, посредством аудиосистемы и т. д.) выполнен с возможностью уведомления оператора об определенном маршруте, который должен быть использован для прохождения поля 14. Пользовательский интерфейс 74 также может предупреждать пользователя о различных рабочих условиях, которые влияют на работу внедорожного транспортного средства 10. Например, в некоторых вариантах осуществления пользовательский интерфейс 74 может предупреждать оператора, если внедорожное транспортное средство испытывает буксование в значительной степени.
В проиллюстрированном варианте осуществления базовая станция 32 содержит устройство 78 хранения данных, коммуникативно связанное с контроллером 68. Устройство 78 хранения данных (например, энергонезависимое хранилище) может представлять собой ПЗУ, флэш-память, жесткий диск или любые другой подходящий оптический, магнитный, или твердотельный носитель данных или их комбинацию. Устройство (устройства) хранения данных может хранить данные (например, карты полей), команды (например, программное обеспечение или прошивку для управления внедорожным транспортным средством и т. д.) и любые другие подходящие данные.
Хотя в проиллюстрированном варианте осуществления система 26 управления транспортным средством системы 24 управления содержит контроллер 46 внедорожного транспортного средства, следует понимать, что в альтернативных вариантах осуществления система 26 управления транспортным средством может включать в себя контроллер 68 базовой станции. Например, в некоторых вариантах осуществления функции управления системы 26 управления транспортным средством могут быть распределены между контроллером 46 внедорожного транспортного средства и контроллером 68 базовой станции. В других вариантах осуществления контроллер 68 базовой станции может выполнять значительную часть функций управления системы 26 управления транспортным средством. Фактически, любые процессы контроллеров 46 и 68 могут быть назначены любому контроллеру по меньшей мере в некоторых вариантах осуществления. Кроме того, по меньшей мере часть процессов, описанных здесь, может выполняться посредством облачного сервиса или других дистанционных средств обработки данных.
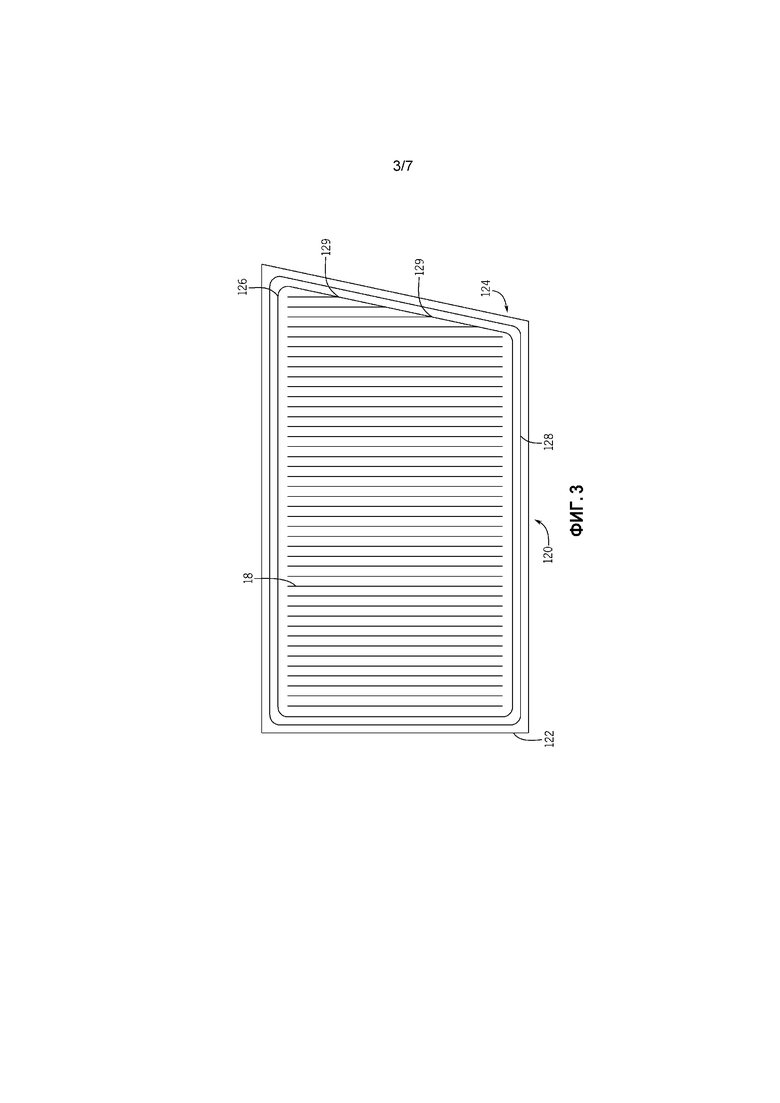
С учетом вышеизложенного, когда внедорожное транспортное средство 10 и сельскохозяйственный орудие 12 проходят по полю, внедорожное транспортное средство 10 и сельскохозяйственный орудие 12 могут сталкиваться с различными формами поля, которые являются непрямоугольными и/или имеют ширину, не равную целому числу, кратному ширине одного прохода транспортного средства 10. Например, на ФИГ. 3 представлена схема поля 120, имеющего трапециевидную форму с квадратным краем 122 и не квадратным краем 124. Если поле 120 проходят вдоль по существу параллельных рядов 18, то прохождение поля с не квадратным углом 126 может быть относительно сложно или невозможно без вовлечения крайних полос 128. В частности, ряды 18, которые заканчиваются под углом к краю 124 поля 120, могут приводить к вовлечению (например, скашиванию) и/или повторному вовлечению частей, которые не должны быть повторно вовлечены (например, полосы). Хотя проиллюстрированное поле 120 содержит трапециевидную форму, некоторые варианты осуществления могут иметь любую форму, которая имеет заостренный или острый угол в одном или нескольких углах и/или включает один или несколько контуров по меньшей мере на одной стороне поля 120, заставляя ряды 18 заканчиваться на полосе по существу под не перпендикулярным углом.
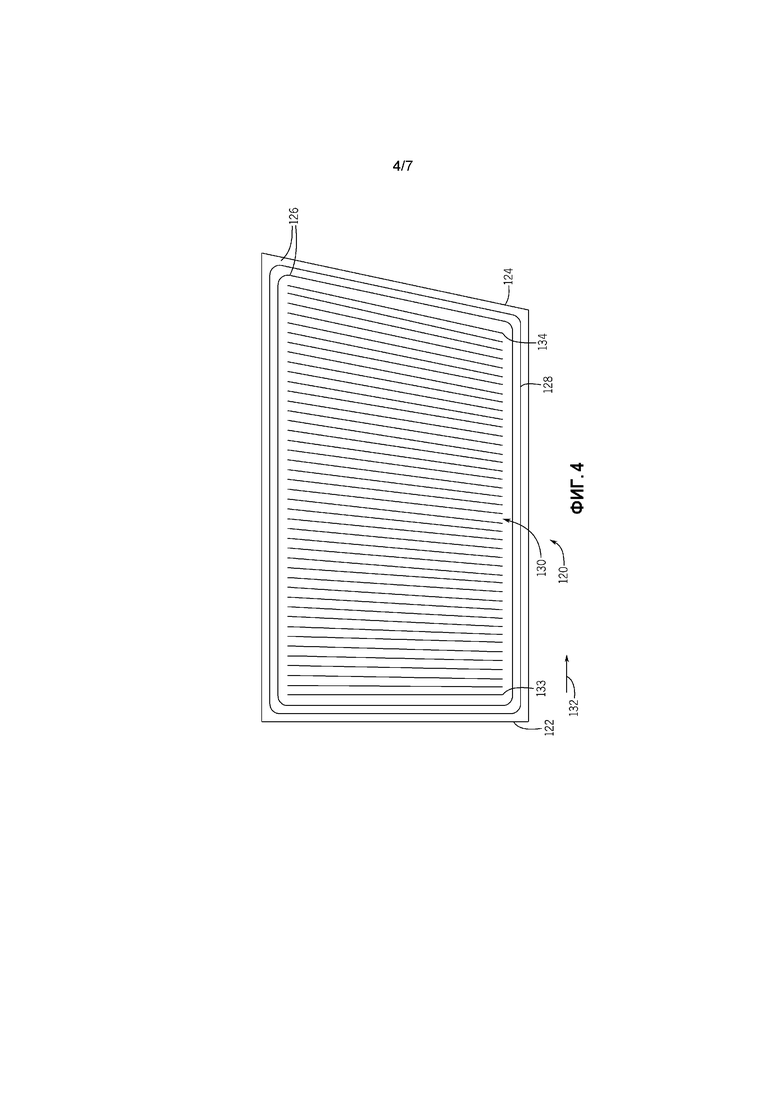
Вместо того, чтобы просто использовать полосы максимальной ширины, может быть создан заранее спланированный маршрут, как показано на ФИГ. 4 и описано ниже, который следует за первым контуром края 122 вблизи края 122 и следует за вторым контуром противоположного края 124 вблизи края 124 с переходной зоной 130, которая переходит от первого контура ко второму контуру, когда выполняются последовательные проходы, причем каждый проход проходит все дальше от края 122 вдоль горизонтального направления 132 в поле 120. Например, первый ряд 133 может иметь первый контур, тогда как второй ряд 134 может иметь второй контур, а все ряды между рядом 133 и рядом 134 могут иметь контур, который представляет собой комбинацию первого и второго контуров с контуром, который находится между первым и вторым контурами. Такие переходы могут вызывать некоторое перекрытие проходов орудия 12, но неэффективность движения по ранее пройденным частям поля 120 компенсируется путем разрешения обработки поля 120 вследствие неквадратного угла 126. Как обсуждалось ранее, контуры могут отслеживаться посредством прохождения по меньшей мере части (например, периметра) поля 120 с помощью внедорожного транспортного средства 10 для картирования поля 120 для определения заранее спланированного маршрута, используя информацию о местоположении (например, полученную при использовании данных GPS) во время процесса картирования для поля 120.
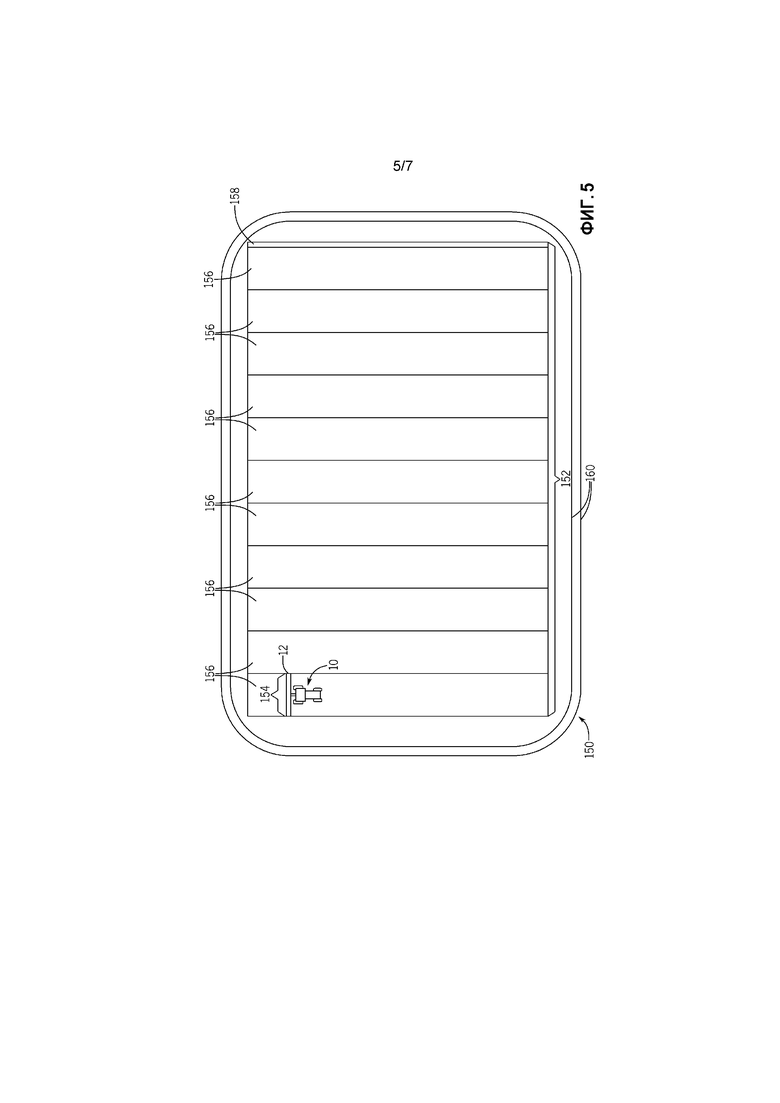
Кроме того, как отмечено выше, частичные ряды (например, ряды, меньшие, чем полная ширина полосы) может быть невозможно или непрактично обрабатывать (например, скашивать) без обработки также других частей поля 14, которые уже были обработаны. Например, на ФИГ.5 представлена схема варианта осуществления поля 150, которое имеет ширину 152, которая должна быть обработана в рядах, которая не равна целому числу, кратному ширине 154 полосы, причем ширина 154 полосы является шириной одного прохода орудия 12 по полю 150. Например, если орудие 12 представляет собой орудие для сенокоса, ширина 154 полосы является шириной травы для сена, скошенной за один проход орудия 12 в поле 150. Как проиллюстрировано, маршрут для скашивания использует ширину 154 полосы для установления ширины ряда. Другими словами, в маршруте для скашивания, проиллюстрированном в поле 150, между соседними рядами существует минимальное не перекрытие. Если ширина поля 150 равна целому числу, кратному ширине полосы 154, такой способ может быть наиболее эффективным. Более того, если тип культуры является пропашной культурой (например, кукурузой), ряды могут быть находится на одинаковом расстоянии за счет орудий фиксированной ширины, которые сажают ряды в определенных положениях относительно друг друга. Однако, если культура является не пропашной культурой (например, травой для сена), а поле 150 имеет ширину (например, ширину 152), которая не равна целому числу, кратному ширине полосы 154, частичный ряд не может быть обработан (например, скошен) должным образом без потенциального вовлечения в обработку частей, которые не должны быть обработаны (например, валков). Кроме того, хотя проиллюстрированный вариант осуществления поля 150 содержит одиннадцать полных рядов 156, каждый из которых имеет ширину полосы 154 и один частичный ряд 158, следует отметить, что рассмотренные в настоящем документе процессы применимы к любому полю, которое имеет ширину 152, которая не равна целому числу, кратному ширине 154 полосы орудия 12. Как было отмечено ранее, частичный ряд 158 может быть трудно обрабатывать без воздействия на части 160 (например, полосы), которые не нужно обрабатывать второй раз.
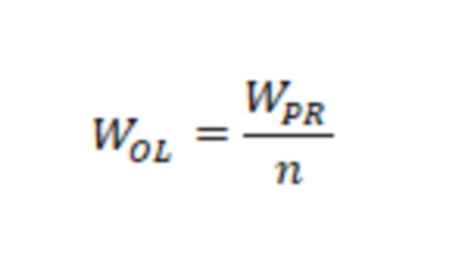
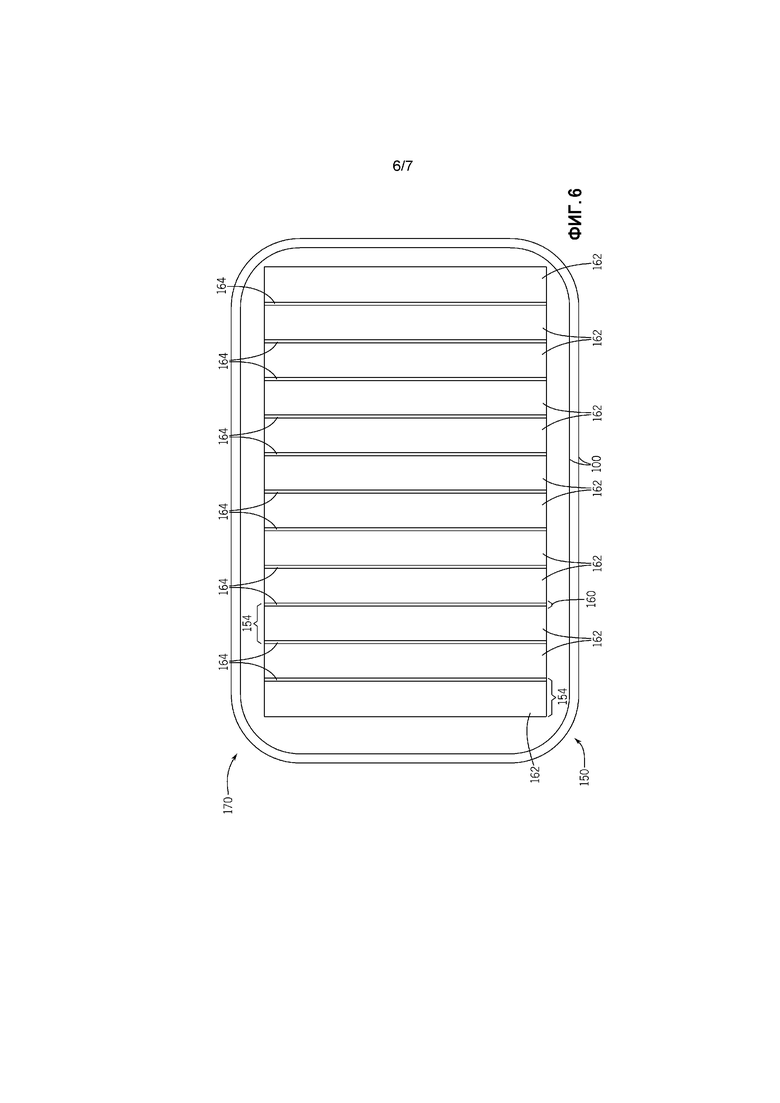
На ФИГ. 6 представлена схема варианта осуществления заранее спланированного маршрута 170, который можно использовать для обработки культур в поле 150. В частности, заранее спланированный маршрут 170 позволяет обрабатывать материал, соответствующий частичному ряду 158 ФИГ. 5. Проиллюстрированный вариант осуществления заранее спланированного маршрута 170 содержит двенадцать перекрывающихся рядов 162, которые перекрываются с соседними рядами в области 164 перекрытия, имеющей ширину 166 перекрытия. В некоторых вариантах осуществления ширина 166 перекрытия может быть рассчитана с использованием следующего уравнения:
 (Уравнение 1)
(Уравнение 1)
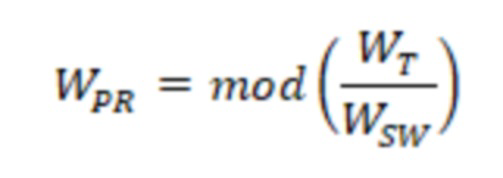
где WOL это ширина 166 перекрытия областей 164 перекрытия, WPR это ширина частичного ряда, который остался бы при скашивании с использованием ширины 154 полосы в качестве ширины рядов, а n - количество полных рядов, которые были бы скошены, если использовать ширину 154 полосы в качестве ширины рядов. В свою очередь, WPR можно вычислить, используя следующее уравнение:
 (Уравнение 2)
(Уравнение 2)
где WT - общая ширина поля, которое должно быть обработано, а WSW - ширина полосы орудия 12. Другими словами, потенциальный частичный ряд 158 перераспределяют среди рядов таким образом, чтобы перекрытия были равны в сумме частичному ряду, позволяя обработку всего поля без риска дополнительной обработки частей, которые не должны быть обработаны. Если WPR равно нулю, ширина части поля, которое должно быть обработано, равна целому числу, кратному ширине полосы орудия 12.
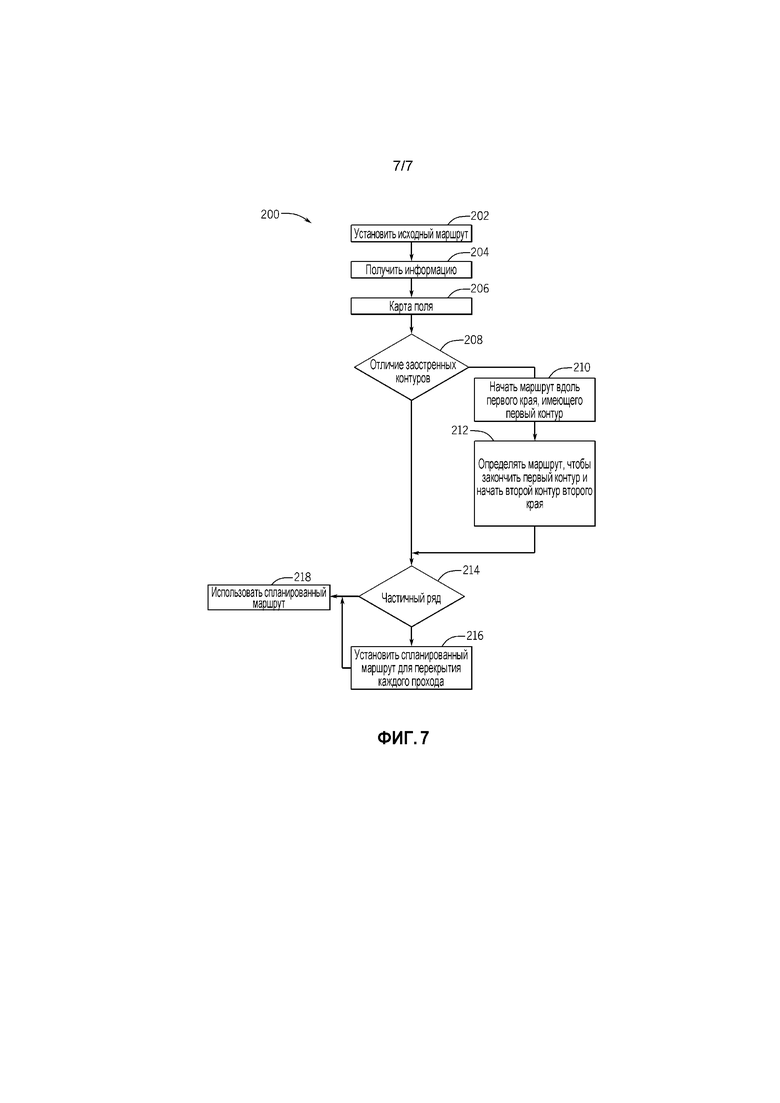
На ФИГ.7 показана блок-схема процесса 200 для работы внедорожного устройства 10 и орудия 12. Процесс 200 может быть выполнен по меньшей мере контроллером 46, контроллером 68, дистанционным процессором (например, облачным сервисом) или их комбинацией. Для маршрута для поля можно по умолчанию использовать маршрут по умолчанию, такой как параллельные ряды, имеющие ширину, равную ширине полосы орудия 12 (блок 202). Процесс 200 содержит получение информации о поле 14, 150 (блок 204). Например, дисплей 76 может представлять команды, например, в качестве части процесса инициализации для поля, для того, чтобы оператор мог обходить по периметру или проходить область поля 14, 150. Устройство 34 для определения местоположения в пространстве определяет местоположение внедорожного транспортного устройства 10 во время процесса инициализации. Контроллеры 46 и/или 68 отслеживают местоположение внедорожного транспортного устройства 10, используя эту информацию. Используя информацию о местоположении создают карту поля (блок 206). Карта может содержать двухмерную границу поля, двухмерный график местоположений внедорожного транспортного средства 10, трехмерный график местности или их комбинацию.
Карту можно использовать для определения другого маршрута движения на основании различных факторов поля. Например, если поле имеет контуры, которые отличаются на противоположных сторонах, и/или ширина поля, которое должно быть обработано, не равна целому числу, кратному ширине полосы орудия, можно заранее определить спланированный маршрут по полю (например, путь по умолчанию может быть изменен). При анализе карты определяют, содержит ли поле какие-либо заостренные углы (блок 208). Например, выполняется определение того, содержит ли поле контуры, которые могли бы привести к тому, что один или несколько рядов закончатся на краю поля под углом, который по существу не перпендикулярен (например, острый или тупой), чтобы установить подходящий маршрут движения по полю. Как отмечено выше, такие углы могут приводить к тому, что один или несколько рядов может быть сложно или невозможно обработать без обработки нежелательных частей (например, полос).
Если поле содержит какие-либо заостренные углы или контуры, заранее спланированный маршрут устанавливают так, чтобы следовать за первым контуром на первом краю поля (блок 210). Заранее спланированный маршрут также определяют так, чтобы он заканчивал или начинал контур первого края, в то же время напротив приближаясь к совпадению со вторым контуром второго края, противоположного первому краю (блок 212) через каждый последующий проход/ряд. Например, первый контур может представлять собой прямую линию, проходящую вдоль первого края, а второй контур может быть линией, направленной от или к первому краю. Другими словами, второй край не параллелен первому краю. При таком изменении угла от первого контура ко второму контуру в некоторых вариантах осуществления угол для определенного ряда может быть определен как угол прохождения между первым и вторым краями, если края продолжали с масштабированием по боковому расстоянию от первого края, деленному на общую ширину поля и изменяя угол первого края на вычисленное значение. Другими словами, угол между первым и вторым краями может быть распределен поровну по всем рядам в поле.
Чтобы определять, будет ли существовать частичный ряд также анализируют карту. В частности, карта может быть проанализирована, чтобы определять, равна ли ширина поля, которое должно быть обработано, целому числу, кратному ширине полосы орудия (блок 214). Например, если ширина полосы орудия составляет двадцать четыре фута, целые числа, кратные ширине полосы будут составлять 48, 72, 96, 120, 144, 168, 192 фута и т. д. Любая другая ширина поля может приводить к появлению частичного ряда. Если будет существовать частичный ряд, заранее спланированный маршрут может быть определен таким образом, чтобы каждый ряд/проход орудия перекрывал соседний ряд/проход (блок 216). Другими словами, перекрытия распределяют ширину частичного ряда в области перекрытия, чтобы позволить обрабатывать все поле (например, скашивать) без обработки дополнительных областей, которые не должны быть обработаны (например, существующих валков). Как только заранее спланированный маршрут определен, заранее спланированный маршрут используют для управления орудием (блок 218). Например, трактором можно управлять, чтобы направить орудие вдоль маршрута. В некоторых вариантах осуществления карта может также быть использована для определения того, когда начинать работу машинному оборудованию (например, режущему машинному оборудованию) орудия (например, когда внедорожное транспортное средство 10 и/или орудие 12 вошли в область поля, которое должно быть обработано) или прекратить работу (например, когда внедорожное транспортное средство 10 и/или орудие 12 вышли из области поля, которое должно быть обработано).
Хотя здесь проиллюстрированы и описаны только некоторые особенности изобретения, многие модификации и изменения будут иметь место для специалистов в данной области техники. Поэтому следует понимать, что прилагаемая формула изобретения охватывает все такие модификации и изменения, которые подпадают в рамки сущности изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОТСЛЕЖИВАНИЯ ПОЛОСЫ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА И ВНЕДОРОЖНОЕ ТРАНСПОРТНОЕ СРЕДСТВО | 2017 |
|
RU2728604C2 |
| СИСТЕМА УПРАВЛЕНИЯ ПРОБУКСОВЫВАНИЕМ ДЛЯ ВНЕДОРОЖНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2715865C1 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 2017 |
|
RU2719047C1 |
| АДАПТИРУЕМАЯ БИБЛИОТЕКА ОБОРУДОВАНИЯ ДЛЯ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ПОДАЧИ КОМАНД И УПРАВЛЕНИЯ | 2017 |
|
RU2758013C2 |
| БИБЛИОТЕКА ОБОРУДОВАНИЯ ДЛЯ ПРОГРАММНОГО ОБЕСПЕЧЕНИЯ ПОДАЧИ КОМАНД И УПРАВЛЕНИЯ | 2017 |
|
RU2750052C2 |
| СИСТЕМА ЗАНЯТИЯ ПОЛОСЫ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА | 2017 |
|
RU2712888C1 |
| СЕЛЬСКОХОЗЯЙСТВЕННАЯ ПАШУЩАЯ СИСТЕМА, СПОСОБ ЕЁ РАБОТЫ И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ, СОДЕРЖАЩИЙ КОМПЬЮТЕРНУЮ ПРОГРАММУ, ВЫПОЛНЕННУЮ С ВОЗМОЖНОСТЬЮ ОСУЩЕСТВЛЕНИЯ УКАЗАННОГО СПОСОБА | 2020 |
|
RU2742473C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА НЕПРЕРЫВНОЙ ОТКАТКИ | 2001 |
|
RU2304078C2 |
| СПОСОБ ВНЕСЕНИЯ МАТЕРИАЛА В СЕЛЬСКОХОЗЯЙСТВЕННОЕ ПОЛЕ | 2010 |
|
RU2550077C2 |
| СПОСОБ КОНТРОЛИРУЕМОГО ЗАСЕВА СЕЛЬСКОХОЗЯЙСТВЕННОЙ ДЕЛЯНКИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2022 |
|
RU2841392C2 |
Группа изобретений относится к сельскому хозяйству. Система управления для внедорожного транспортного средства содержит запоминающее устройство, хранящее команды и процессор. Процессор выполнен с возможностью выполнения команд, заставляющих процессор определять, отличается ли первый контур первого края поля от второго контура второго края поля, который находится на противоположной стороне поля от первого края, и если первый контур отличается от второго контура, определять заранее спланированный маршрут движения по полю внедорожного транспортного средства. Заранее спланированный маршрут включает первый проход внедорожного транспортного средства, который следует за первым контуром на первом краю, последующие проходы внедорожного транспортного средства для постепенного перемещения от первого контура ко второму контуру с использованием частичных перекрытий проходов орудия, буксируемого или встроенного во внедорожное транспортное средство, и последний проход внедорожного транспортного средства, который следует за вторым контуром на втором краю. Процессор выполнен с возможностью управлять внедорожным транспортным средством, чтобы проходить поле по меньшей мере частично на основании заранее спланированного маршрута. Система управления для внедорожного транспортного средства содержит запоминающее устройство, хранящее команды, и процессор. Процессор выполнен с возможностью выполнения команд, заставляющих процессор определять, равна ли ширина поля не целому числу, кратному ширине полосы орудия, и если ширина поля не равна целому числу, кратному ширине полосы, определять маршрут для создания перекрытия проходов рядов так, чтобы ширина поля была равна целому числу, кратному частям без перекрытия каждого прохода. Создание перекрытия включает определение ширины перекрытия в зависимости от ширины поля и ширины полосы. Процессор выполнен с возможностью управлять прохождением внедорожного транспортного средства по полю по меньшей мере частично на основании маршрута. Способ управления внедорожным транспортным средством на поле включает картирование поля посредством процессора, используя устройство для определения местоположения в пространстве внедорожного транспортного средства, определение посредством процессора с помощью данных карты, равна ли ширина поля не целому числу, кратному ширине полосы орудия. Если ширина поля не равна целому числу, кратному ширине полосы, определение посредством процессора маршрута для создания перекрытия проходов рядов, так чтобы ширина поля была равна целому числу, кратному частям без перекрытия каждого прохода, причем ширину перекрытия создают на основании по меньшей мере частично отношения между шириной полосы и шириной поля. Управление посредством процессора внедорожным транспортным средством, чтобы проходить поле по меньшей мере частично на основании маршрута. Обеспечивается повышение эффективности выполнения полевых операций. 3 н. и 17 з.п. ф-лы, 7 ил.
1. Система управления для внедорожного транспортного средства, содержащая:
запоминающее устройство, хранящее команды;
процессор, выполненный с возможностью выполнения команд, заставляющих процессор:
определять, отличается ли первый контур первого края поля от второго контура второго края поля, который находится на противоположной стороне поля от первого края; и
если первый контур отличается от второго контура, определять заранее спланированный маршрут движения по полю внедорожного транспортного средства, причем заранее спланированный маршрут включает:
первый проход внедорожного транспортного средства, который следует за первым контуром на первом краю;
последующие проходы внедорожного транспортного средства для постепенного перемещения от первого контура ко второму контуру с использованием частичных перекрытий проходов орудия, буксируемого или встроенного во внедорожное транспортное средство; и
последний проход внедорожного транспортного средства, который следует за вторым контуром на втором краю; и
управлять внедорожным транспортным средством, чтобы проходить поле по меньшей мере частично на основании заранее спланированного маршрута.
2. Система управления по п. 1, в которой первый контур отличается от второго контура, когда в углу поля между первым краем поля и соседним краем поля образован острый угол.
3. Система управления по п. 1, содержащая пользовательский интерфейс, который предоставляет информацию оператору и получает варианты выбора от оператора.
4. Система управления по п. 3, в которой пользовательский интерфейс выполнен с возможностью получения варианта выбора типа куль туры.
5. Система управления по п. 4, в которой определение отличий контуров используется только в том случае, если выбран тип не пропашной культуры.
6. Система управления по п. 5, в которой тип не пропашной культуры включает сено, пшеницу, ячмень, семена трав, рапс, горох или чечевицу.
7. Система управления по п. 1, в которой постепенное перемещение от первого контура ко второму контуру для каждого прохода является функцией расстояния прохода от первого края.
8. Система управления по п. 1, в которой команды сконфигурированы, чтобы заставлять процессор:
определять, будет ли существовать частичный ряд с использованием заранее спланированного маршрута; и
если будет существовать частичный ряд, отрегулировать заранее спланированный маршрут, чтобы исключить частичный ряд.
9. Система управления по п. 8, в которой ширина частичного ряда разделена между областями перекрытия каждого прохода орудия.
10. Система управления для внедорожного транспортного средства, содержащая:
запоминающее устройство, хранящее команды;
процессор, выполненный с возможностью выполнения команд, заставляющих процессор:
определять, равна ли ширина поля не целому числу, кратному ширине полосы орудия;
если ширина поля не равна целому числу, кратному ширине полосы, определять маршрут для создания перекрытия проходов рядов так, чтобы ширина поля была равна целому числу, кратному частям без перекрытия каждого прохода, причем создание перекрытия включает определение ширины перекрытия в зависимости от ширины поля и ширины полосы; и
управлять прохождением внедорожного транспортного средства по полю по меньшей мере частично на основании маршрута.
11. Система управления по п. 10, содержащая:
внедорожное транспортное средство и
базовую станцию.
12. Система управления по п. 11, в которой процессор расположен во внедорожном транспортном средстве, в базовой станции или распределен между и базовой станцией, и внедорожным транспортным средством.
13. Система управления по п. 10, в которой ширину перекрытия для каждого ряда вычисляют с использованием следующего уравнения:
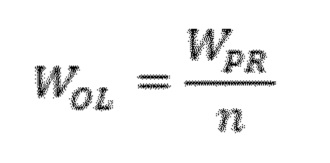
где WOL - ширина перекрытия для каждого ряда, WPR - ширина частичного ряда, который существовал бы, если бы поле проходили с использованием рядов, имеющих ширину, равную ширине полосы, а n - число полных рядов, которые существовали бы, если бы поле проходили с использованием рядов, имеющих ширину, равную ширине полосы.
14. Система управления по п. 13, в которой ширину частичного ряда вычисляют с использованием следующего уравнения:
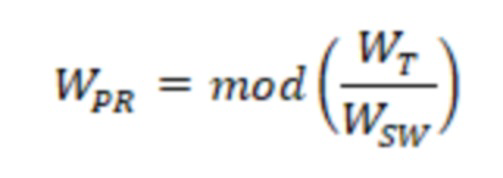
где WT представляет собой общую ширину поля, которое должно быть обработано, a WSW - ширина полосы орудия.
15. Система управления по п. 10, содержащая пользовательский интерфейс, выполненный с возможностью предоставления информации оператору и получения вариантов выбора от оператора, причем пользовательский интерфейс выполнен с возможностью получения варианта выбора типа культуры.
16. Система управления по п. 15, в которой определение маршрута выполняется только если ширина поля не равна целому числу, кратному ширине полосы, и выбран тип не пропашной куль туры.
17. Система управления по п. 10, содержащая устройство для определения местоположения в пространстве, которое указывает местоположение внедорожного транспортного средства, которое выполнено с возможностью обеспечения картирования поля для создания и регулировки заранее спланированного маршрута.
18. Способ управления внедорожным транспортным средством на поле, включающий:
картирование поля посредством процессора, используя устройство для определения местоположения в пространстве внедорожного транспортного средства;
определение посредством процессора с помощью данных карты, равна ли ширина поля не целому числу, кратному ширине полосы орудия;
если ширина поля не равна целому числу, кратному ширине полосы, определение посредством процессора маршрута для создания перекрытия проходов рядов, так чтобы ширина поля была равна целому числу, кратному частям без перекрытия каждого прохода, причем ширину перекрытия создают на основании по меньшей мере частично отношения между шириной полосы и шириной поля; и
управление посредством процессора внедорожным транспортным средством, чтобы проходить поле по меньшей мере частично на основании маршрута.
19. Способ по п. 18, включающий:
определение посредством процессора, отличается ли первый контур первого края поля от второго контура второго края поля, который находится на противоположной стороне поля от первого края; и
если первый контур отличается от второго контура, определение посредством процессора маршрута движения по полю по контурам для внедорожного транспортного средства, причем маршрут по контурам включает:
первый проход внедорожного транспортного средства, который следует за первым контуром на первом краю;
последующие проходы внедорожного транспортного средства для постепенного перемещения от первого контура ко второму контуру с использованием частичных перекрытий проходов орудия, буксируемого или встроенного во внедорожное транспортное средство; и
последний проход внедорожного транспортного средства, который следует за вторым контуром на втором краю; и
управление посредством процессора внедорожным транспортным средством для прохождения по полю, по меньшей мере частично на основании маршрута по контурам.
20. Способ по п. 18, в котором картирование поля с использованием устройства для определения местоположения в пространстве внедорожного транспортного средства включает прохождение по периметру поля.
| US 2010262342 A1, 14.10.2010 | |||
| US 2004193348 A1, 30.09.2004 | |||
| СИСТЕМА МАРШРУТИЗАЦИИ ДЛЯ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2384987C2 |
| ТРАКТОР ТОЧНОГО ХОДА И СПОСОБ АВТОПИЛОТИРОВАНИЯ МАШИННО-ТРАКТОРНОГО АГРЕГАТА ПО МЕСТНЫМ ОРИЕНТИРАМ | 2013 |
|
RU2550915C1 |

