Изобретение относится к области сейсмической разведки и может быть использовано для целеуказания средствам поражения, в устройствах управления подрывом инженерных боеприпасов, а также для мониторинга участков местности и контроля несанкционированного доступа к охраняемым объектам.
Общеизвестны сейсмометрические способы обнаружения движущихся объектов, заключающиеся в преобразовании механических колебаний грунта в аналоговый электрический сигнал, в анализе этого сигнала во временной и/или частотной областях с целью выделения признаков полезного сигнала на фоне шумов и помех. Интересны варианты обработки сейсмосигнала в нескольких выделенных частотных полосах или в различных участках одной полосы частот. Например, в [1] и [2] описана работа устройств, характеризующая способы обнаружения движущихся объектов в контролируемой зоне, характерной особенностью которых является то, что после регистрации сейсмических колебаний, возникающих в результате движения объектов, обработка этих колебаний осуществляется в двух частотных полосах (15-25) Гц и (35-50) Гц (в [1]) и в низкочастотном и высокочастотном участках общей полосы (15-50) Гц (в [2]). В [3] предложен способ обнаружения объектов, в котором обработка сейсмосигналов ведется с использованием низкочастотной полосы (5-25) Гц и высокочастотной составляющей, формируемой специальным образом в области частот (100-150) Гц.
В [1] определяют спектры зарегистрированных сейсмических сигналов и по изменению соотношения высокочастотных и низкочастотных составляющих в процессе обработки, которая ограничивается сопоставлением амплитуд результирующих колебаний, образованных спектральными составляющими, выявляют факт наличия изменений в частотных полосах сигнала. Далее на основании выявленных отличий в соответствии с определенным правилом принимают решение об обнаружении объекта в контролируемой зоне.
К основным недостаткам реализации данного способа можно отнести:
- ограниченность функциональных возможностей реализующего этот способ устройства вследствие низкой эффективности обработки сигнала, что ограничивает область его применения;
- слабая устойчивость устройства, реализующего регистрацию и обработку поступающих на его вход сейсмических колебаний, к изменению уровня внешних помеховых или погодно-климатических условий, так как в этом случае состав частотных составляющих в каждой из полос будет изменяться в отсутствии объекта, что приведет к резкому росту числа ложных обнаружений.
В [2], в отличие от [1], предложено обнаружение сигнала осуществлять в полосе пропускания, согласованной со спектром сигнала в целом (15-50) Гц, а не с его отдельными частями полосах (15-25) Гц и (35-50) Гц. Это достигается тем, что результирующее колебание представляют, как колебание, имеющее амплитудную и угловую (частотную) модуляцию

где 
При этом для угловой модуляции имеет место равенство

Здесь ωд - девиация (амплитуда отклонения) частоты.
В данном патенте частоты колебаний ω1 и ω2 на заданном интервале усреднения определяют посредством подсчета числа пересечений колебанием нулевого уровня в низкочастотной и высокочастотной частях спектра.
Очевидно, что девиация частоты ωд определяется не только соотношением амплитуд спектральных составляющих, но посредством частоты модуляции Δω зависит еще и от расположения этих спектральных составляющих на частотной оси. При этом она увеличивается с ростом Δω при фиксированной величине индекса амплитудной модуляции М. Следовательно, девиация частоты ωд является более информативным параметром, чем индекс М, который определяется лишь соотношением амплитуд спектральных составляющих. Таким образом, величина девиации характеризует влияние на результат как индекса М (вклад амплитудных соотношений спектральных составляющих), так и девиации Δω (вклад, учитывающий взаимное расположение этих спектральных составляющих на оси частот). Использованием девиации частоты в процессе обработки сейсмосигналов в данном патенте и достигается положительный результат.
Изменение частоты в среднем на заданном интервале усреднения сразу влечет за собой изменение у колебания числа пересечений нулевого уровня, которое характеризует либо полезный сигнал (обнаружение объекта), либо помеху, так как увеличение числа нулей эквивалентно увеличению частоты в среднем на заданном интервале усреднения. Выбором порога между частотами ω2 и ω1, который задается некоторым заранее заданным числом нулей на интервале усреднения, обеспечивается решение задачи селекции помеховых сигналов и обнаружение полезных, не только для ситуаций, когда их спектры отличаются значением М своих спектральных составляющих, но и в тех случаях, когда при одинаковом значении индекса М различие в спектрах определяется положением спектральных составляющих на частотной оси.
Основным недостатком, присущим данному способу является зависимость числа пересечений нулевого уровня сейсмическим колебанием от изменения уровня внешних помеховых или погодно-климатических условий, что будет приводить к изменению состава частотных составляющих в каждой из полос спектра даже в отсутствии объекта. А это отрицательно повлияет на величину выставляемого порога, что, как и в предыдущем случае, может обеспечить прирост числа ложных обнаружений, либо привести к пропуску полезного сигнала (к необнаружению объекта, движущегося в зоне контроля).
В [3] полоса низких частот составляет (5-25) Гц, а вместо полосы высоких частот предложено использовать формирование числа экстремумов за определенный интервал времени. Этой операцией выделяют высокочастотную составляющую сейсмического сигнала, что функционально почти эквивалентно выделению полосы высоких частот в районе (100-150) Гц. Формирование числа экстремумов и высокочастотной составляющей сейсмосигнала заключается в том, что на длительности скользящего временного окна Δt с подсчитывается количество положительных и отрицательных экстремумов. Затем это количество делится на длительность временного скользящего окна Δt с, которая примерно равна длительности сейсмосигнала. Далее временное окно периодически смещается на отрезок времени δt с и вновь оценивается величина высокочастотной составляющей сейсмосигнала.
Учитывая, что механизм выделения высокочастотной составляющей сейсмосигнала здесь схож с механизмом выделения числа пересечений нуля колебанием, описанным в [2], основным недостатком данного способа также будет являться зависимость числа положительных и отрицательных экстремумов от изменения уровня внешних помеховых или погодно-климатических условий, что будет приводить к изменению значения высокочастотной составляющей сейсмосигнала в отсутствии объекта. Это также отрицательно повлияет либо на увеличение числа ложных обнаружений, либо приведет к пропуску полезного сигнала.
Наиболее близким по технической сущности к предлагаемому является способ, описанный в [4], принятый за прототип.
В способе-прототипе для повышения устойчивости сейсмосигнала к изменению сейсмического фона в неблагоприятных условиях предлагается использовать адаптивный (следящий) порог, значение которого будет зависеть от конкретных условий эксплуатации реализующего способ устройства.
Сущность способа-прототипа заключается в следующем. Следящий порог состоит из двух слагаемых - адаптивной и постоянной составляющих.
Введение следящего порога эквивалентно использованию другого информативного признака - скорости изменения отношения средневзвешенной частоты спектра в полосе низких частот полезного сейсмосигнала и его высокочастотной составляющей. Постоянная составляющая следящего порога вводится для обеспечения высокой помехоустойчивости.
Способ-прототип осуществляется выполнением следующих операций.
1. За время скользящего прямоугольного окна выполняется преобразование Фурье и находится значение модуля амплитуды каждой гармоники. Длительность временного окна равна Δt с, а его смещение - δt с (между n-м и (n-1)-м временными окнами).
2. Осуществляется вычисление средневзвешенной частоты в полосе низких частот полезного сейсмосигнала (5-25) Гц.
3. Для определения высокочастотной составляющей в области частот (100-150) Гц, аналогично тому, как это делается в [3], первоначально подсчитывается количество положительных и отрицательных экстремумов во временной области входного сейсмосигнала на длительности скользящего временного окна Δt с. Далее количество экстремумов делится на длительность скользящего временного окна Δt с.
4. Находится отношение средневзвешенной частоты спектра в низкочастотной полосе и высокочастотной составляющей сейсмосигнала.
5. Определяется значение следящего порога с учетом значений отношения средневзвешенной частоты спектра в низкочастотной полосе и высокочастотной составляющей сейсмосигнала за время анализируемого n-го и предыдущего (n-1)-го временного окна. Значение следящего порога предлагается формировать по следующему правилу:
1) АСПn=АСПn-1+ΔАСП, если ИПn >ИПn-1 или
АСП n=АСПn-1, если ИПn ≤ ИПn-1;
2) АСПn=ИПn, если ИПn < АСПn;
3) СПn=АСПn+ПСП,
где
АСП n, АСПn-1 - значения адаптивной составляющей следящего порога в n-ом и (n-1)-ом временном окне анализа соответственно;
ΔАСП - приращение адаптивной составляющей следящего порога;
ИП n, ИПn-1 - значения информативного признака в n-ом и (n-1)-ом временном окне анализа соответственно;
СП n - значение следящего порога в n-ом временном окне анализа;
ПСП - постоянная составляющая следящего порога.
6. Фиксируется начальное значение следящего порога.
7. Вычисленное значение текущего следящего порога сравнивается с текущим значением отношения средневзвешенной частоты спектра в низкочастотной полосе и высокочастотной составляющей сейсмосигнала.
8. При превышении следящего порога принимается решение об обнаружении объекта.
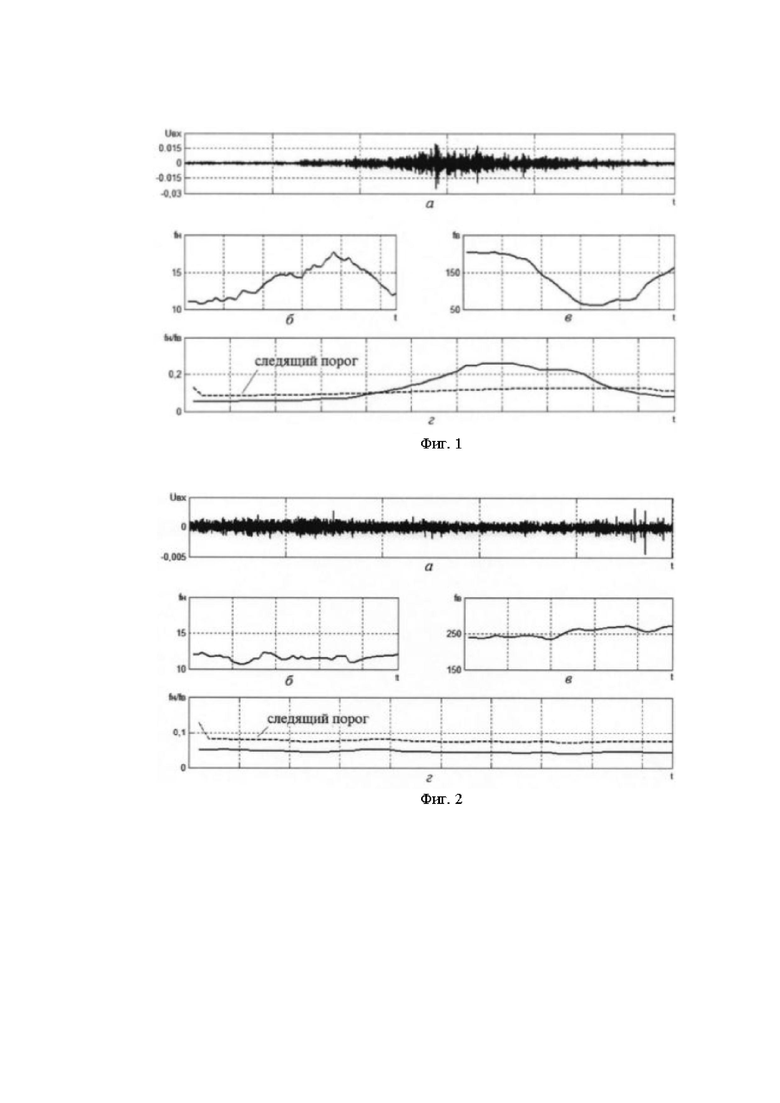
На фиг. 1а показано графическое изображение сейсмического сигнала от движущегося транспортного средства на расстоянии 100 м от сейсмоприемника по траверзу. На фиг. 2а - то же для сейсмического фона.
На фиг. 1б, 1в и 2б, 2в приведены средневзвешенные частоты спектров в полосе низких частот (5-25 Гц) и высокочастотная составляющая сейсмосигнала соответственно.
На фиг. 1г и 2г показаны отношения средневзвешенных частот полезного и помехового сейсмосигналов в полосе частот (5-25) Гц и высокочастотных составляющих соответствующих сейсмосигналов. На этих фигурах штриховыми линиями показаны соответствующие следящие пороги.
Анализ графических изображений, представленных на фиг. 1б, 1в и фиг. 2б, 2в показывает, что для помеховых сейсмосигналов отношения средневзвешенных частот в полосе частот (5-25) Гц и высокочастотных составляющих мало изменяются по величине, в то время как эти характеристики для полезных сейсмосигналов в достаточной степени трансформируются по величине, на чем базируется сущность способа-прототипа.
К основному недостатку способа-прототипа можно отнести то, что при достаточно низких отрицательных температурах количество высокочастотных гармоник в обеих спектральных полосах увеличится, их амплитуды возрастут. В то время, как количество низкочастотных компонент в обеих полосах частот уменьшится, а амплитуды оставшихся уменьшатся. Следовательно, отношение средневзвешенных частот при воздействии полезных сейсмосигналов в полосе частот (5-25) Гц и их высокочастотных составляющих, (а также и скорости изменения этого отношения) будет искажено таким образом, что ее форма может потерять явно выраженный максимум. Это может привести к пропуску полезного сейсмосигнала (необнаружению объекта наземной техники). С другой стороны, в глинистой или болотистой местности, а также после проливного дождя поверхностный слой почвы становится более рыхлым, что может привести к снижению в обеих частотных полосах количества высокочастотных составляющих и к увеличению в них количества низкочастотных компонент. Значит, отношение средневзвешенных частот при воздействии помеховых сейсмосигналов в полосе частот (5-25) Гц и их высокочастотных составляющих, (а также и скорости изменения этого отношения) будет искажено таким образом, что ее форма может приобрести явно выраженный максимум. В этом случае может реализоваться ложное обнаружение объекта наземной техники.
Задача предлагаемого способа - повышение вероятности правильного обнаружения подвижных объектов наземной техники и снижение вероятности их ложного обнаружения.
Для решения поставленной задачи в способе обнаружения движущихся объектов наземной техники по сейсмическому сигналу, включающем регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, согласно изобретению, в отсутствии объекта осуществляется деление выбранного диапазона рабочих частот на две полосы - низкочастотную и высокочастотную по условию равенства в них спектральных плотностей сейсмофона, периодической оценкой значения коэффициента выравнивания энергий сейсмофона в этих полосах, как величины обратной отношению усредненной на промежутке времени наблюдения энергии сейсмофона низкочастотной полосы к усредненной на этом же временном промежутке энергии сейсмофона высокочастотной полосы; в присутствии подвижного объекта наземной техники на длительности текущего временного окна осуществляется деление величины энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе на величину энергии смеси полезного сейсмосигнала и сейсмофона в высокочастотной полосе, домножение полученного частного от деления на последнее значение выравнивающего коэффициента и сравнение текущих значений результата с двумя порогами - верхним и нижним; в случае пересечения этими текущими значениями нижнего или верхнего порогов сверху вниз или снизу вверх фиксируется факт обнаружения объекта наземной техники, в том случае, когда после пересечения данными текущими значениями нижнего или верхнего порогов они остаются между этими порогами, то будет реализован вариант пропуска полезного сейсмосигнала - необнаружение объекта.
В предлагаемом способе для повышения эффективности обработки сейсмических колебаний были рассмотрены сейсмические сигналы, возбуждаемые объектами наземной техники в поверхностном слое почвы при прохождении их на различных траверзных расстояниях от трехкомпонентного сейсмоприемника и проанализированы их спектры при движении объектов вблизи точек траверза. При этом, исходя из накопленного опыта работы в этой области, ширина общей полосы исследуемых спектров не должна превышать (30-35) Гц. Поэтому с учетом теоремы Найквиста была выбрана частота дискретизации при оцифровке аналоговых сигналов равная fd = 64 Гц. Кроме того, известно, что низкочастотная часть спектра (примерно от 0 до 10 Гц) инициируется в основном сейсмофоном, имеющим самые различные источники, такие как отголоски процессов дальней вулканической деятельности и дальних землетрясений; ближних ветровых воздействий на растительный покров почвы и т. п. В связи с этим при поиске информативных параметров, изучаемых сейсмосигналов, их спектры будем рассматривать в границах (10-32) Гц.
Остается вопрос - как найти рациональное деление всей ширины полосы рабочих частот Δf = f1 - f2 = 32-10 = 22 Гц на две такие части
Δf1 = fx - f1 и Δf2 = f2 - fx+1 = Δf - Δf1,
у которых отношение содержащихся в них шумовых энергий Oш(f1, f2, fx), полученных достаточно длительным накоплением естественного фона, было бы близко к единице. Здесь fx - частота, делящая полосу Δf в необходимом соотношении, а усредненное отношение шумовых энергий этих полос

Такое равновесное состояние шумовых энергий в этих полосах позволяло бы определять значения энергий сейсмических сигналов, возбуждаемых различными классами объектов наземной техники в поверхностном слое почвы, близких к истинным. Следовательно, необходимо периодически определенным образом компенсировать отрицательное влияние перераспределения частотных составляющих в обоснованно выбранных низкочастотной и высокочастотной полосах частотного диапазона, характерного для сейсмических колебаний поверхностного слоя почвы, вызванного движением объектов наземной техники. Такая компенсация должна обеспечивать приблизительное равенство (3) на протяжении обработки сейсмосигнала.
Заявляемый способ включает следующие операции в отсутствии или наличии объектов наземной техники.
1. Дискретизировать три компоненты либо естественного сейсмического фона 
2. Ввести количество частотных отсчетов Nf = 32: n = 0, 1, …, Nf-1 - текущие номера отсчетов, ввести последовательность периодов дискретизации (скользящих временных окон, на которых укладывается Np = 64 временных отсчета), количество которых также определяется величиной времени наблюдения: k = 0, 1, … - номера текущих позиций временных окон 
где hk = kNp.
Следовательно, величины (4) представляют собой матрицы, где каждая строка является временным окном на k-ой текущей позиции, содержащая входящие в нее с 0-го по Np-1-й отсчеты.
В отсутствии объектов наземной техники.
1. Определить рациональную величину делящей частоты fx.
1.1. На выбранной длительности наблюдения сейсмофона, содержащем Nu текущих позиций временного окна, с использованием преобразования Фурье найти текущие спектральные плотности трех компонент естественного сейсмического фона в полосе Δf, определить полную спектральную плотность сейсмофона в этой полосе

Здесь
текущие спектральные плотности x-, y- и z-компонент сейсмофона на k-ой позиции временного окна; 
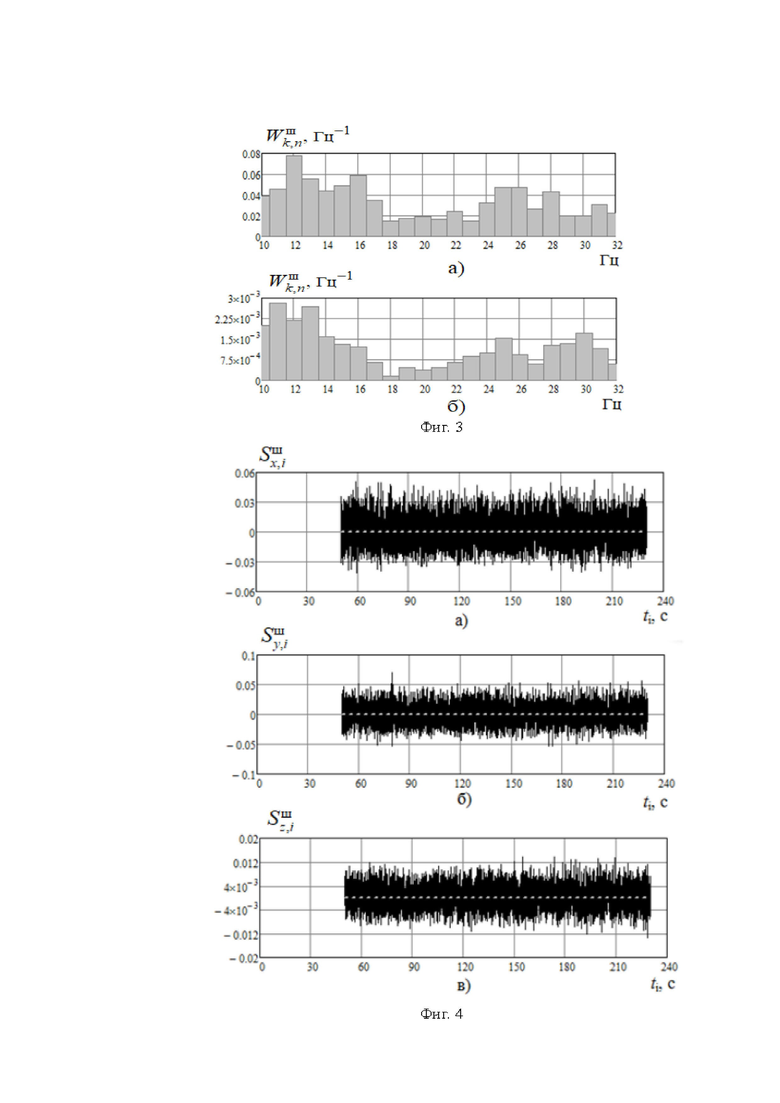
В качестве примера на фиг. 3а и фиг. 3б в этой полосе частот приведены модули полных спектральных плотностей 
Анализ изображенного на фиг. 3а и 3б, а также множества им подобных, показал, что на основе спектральной плотности сейсмофона можно с достаточной точностью определить искомую среднестатистическую величину делящей частоты, которая обеспечивает величину отношения усредненных полных спектральных плотностей низкочастотной и высокочастотной полос общего спектра 
Это автоматически приводит к приближенному выполнению равенства (3). Здесь
представляют собой усредненные по всем Nu текущим позициям временного окна спектральные плотности сейсмофона в низкочастотной и высокочастотной полосах. Скобки < * > означают операцию усреднения на длительности временного окна (64 отсчета).
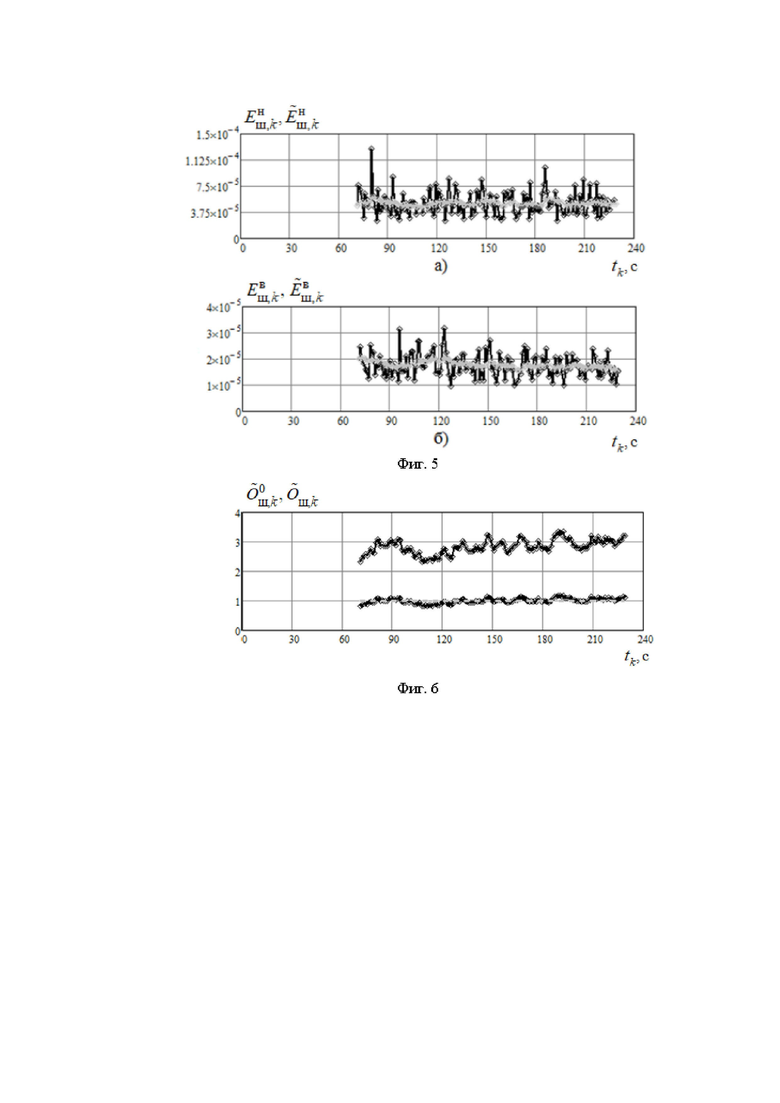
1.2. В найденных частотных полосах Δf1 = 19-10=9 Гц и Δf2 = 32-20=12 Гц найти текущие значения полных энергий сейсмофона 

энергии компонент сейсмофона в соответствующих частотных полосах.
1.3. Обеспечить фильтрацию этих энергий комплементарным фильтром с коэффициентами усиления К1 = 0,9 и К2 = 0,1:

1.4. Найти отношение текущих значений отфильтрованных энергий сейсмофона в общем случае неравного единице
1.5. Вычислить среднее значение по всем текущим позициям временного окна

9. Найти выравнивающий коэффициент как величину, обратную (9)
1.6. Скомпенсировать влияние внешних факторов на распределение энергии сейсмофона по частотным составляющим полос (восстановить энергетический баланс относительно порога равновесия равного единице)

1.7. Периодически оценивать величину соотношения (9), находить текущее значение выравнивающего коэффициента и с его помощью восстанавливать баланс энергий сейсмофона в частотных полос Δf1 и Δf2, если это потребуется.
На фиг. 4а, 4б и 4в представлены записи трех взаимно ортогональных компонент сейсмофона. На фиг. 5а и 5б даны графические изображения неотфильтрованных (7) и отфильтрованных в соответствии с (8) энергий сейсмофона в соответствующих частотных полосах. Если не использовать балансировку энергий сейсмофона в полосах рабочих частот, то на этом промежутке времени все отсчеты (11) будут располагаться выше порога Рmax и осуществлять обнаружение объекта не рекомендуется, так как в этом случае при осуществлении в дальнейшем классификации этого объекта, вероятность его правильной классификации будет крайне низка.
Усредненное по всем k позициям временного окна соотношения (9) дает число 1,004, что показано на фиг. 6. Это значит, что баланс шумовых энергий в полосах соблюдается с точностью до 0,4%, что вполне удовлетворяет требованиям практики.
Основным выводом, который следует из приведенных операций, подтвержденных иллюстративным материалом, является тот факт, что если в частотных полосах соблюден баланс шумовых энергий, то отношение энергий соответствующих полос должно колебаться в небольших пределах около единицы (порог равновесия).
При воздействии сейсмосигналов от объектов наземной техники.
1. По аналогии с (9) с учетом использования найденного на последнем оценочном периоде значения выравнивающего коэффициента определить отношение энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе к такой же энергии в высокочастотной полосе

2. Отслеживать текущие значения скорректированного соотношения (11) и сравнивать их с двумя порогами Рmin=const1 и Рmax= const2, при этом в случае пересечения скорректированным соотношением (11) порогов Рmin и Рmax сверху вниз или снизу вверх фиксируется факт обнаружения объекта наземной техники.
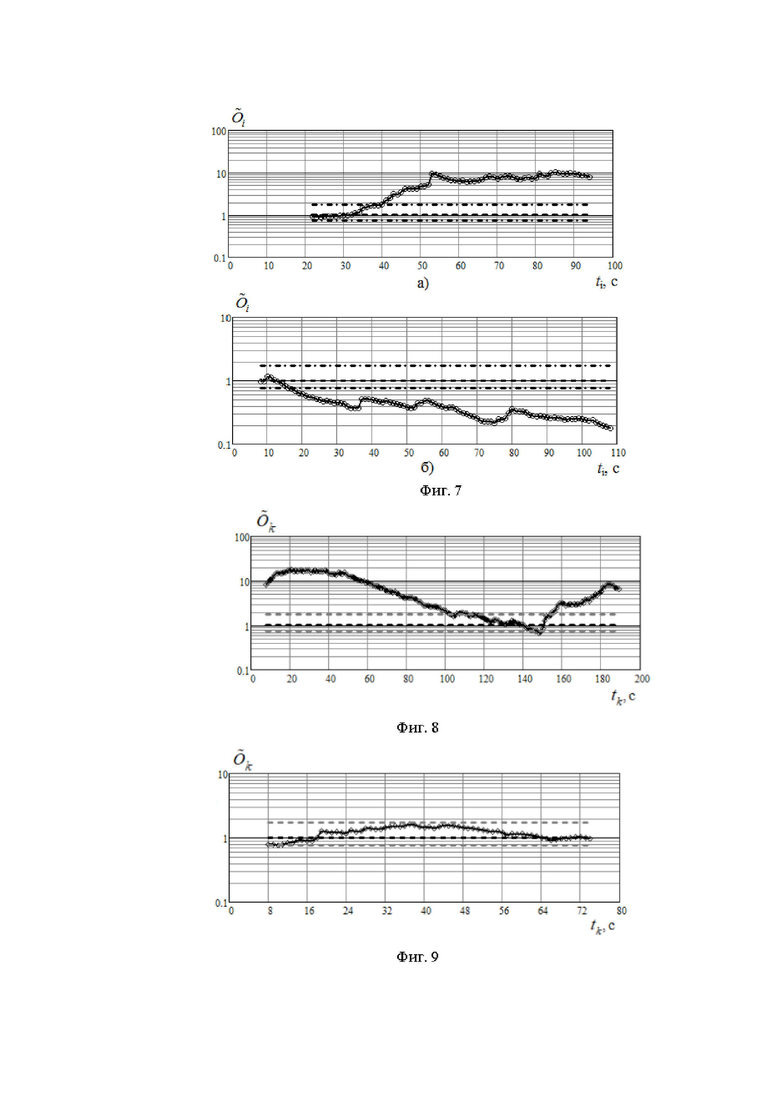
Величина порогов Рmin и Рmax находилась по результатам анализа соотношения (11), проведенного для записей сейсмофонов в различные дни и при различных погодных условиях. Выяснилось, что эти пределы с достаточной для практики точностью определяются величинами constн = 0,75 и constв =1,75. Таким образом, когда объект наземной техники приближается к сейсмоприемнику издалека, соотношение (10) постепенно переходит в соотношение (11).
На фиг. 7а представлен пример обнаружения грузового автомобиля «УРАЛ», движущегося со скоростью 30 км/ч при расстоянии от сейсмоприемника до точки траверза 100 м; на фиг. 7б - «БМП-3», движущейся с той же скоростью при таком же траверзном расстоянии. Здесь жирными штрихпунктирными линиями изображены уровни Рmin и Рmax, а жирным штрихом - порог равновесия.
Если отсчеты (11) пересекают пороги Рmax и Рmin сверху вниз, то это значит, что объект техники заводит достаточно мощный мотор в зоне чувствительности сейсмоприемника и затем начинает движение. На фиг. 8 проиллюстрирована ситуация, когда танк «Т-72» завел мотор в 100 метрах в стороне от точки траверза и начал движение со средней скоростью 25 км/ч.
Если же при прохождении объекта по трассе отсчеты (11) будут располагаться ниже порога Рmin, либо после пересечения какого-либо из порогов Рmin или Рmax останутся между ними, то будет реализован вариант пропуска полезного сигнала (необнаружение объекта). Этот случай иллюстрирует графическое изображение (11) на фиг. 9, где грузовой автомобиль «УРАЛ» двигался со скоростью 40 км/ч при расстоянии от сейсмоприемника до точки траверза 250 м.
Если в результате анализа пришедшего сейсмосигнала все отсчеты (16) располагаются выше порога Рmax, то это означает соответствующий дисбаланс энергий сейсмофона у низкочастотной и высокочастотной полос, который может быть вызван каким-либо внешним фактором. Так как пересечения ни одного уровня не произошло, то в этом случае обнаружение игнорируется. Таким образом реализуется снижение вероятности ложного обнаружения объекта.
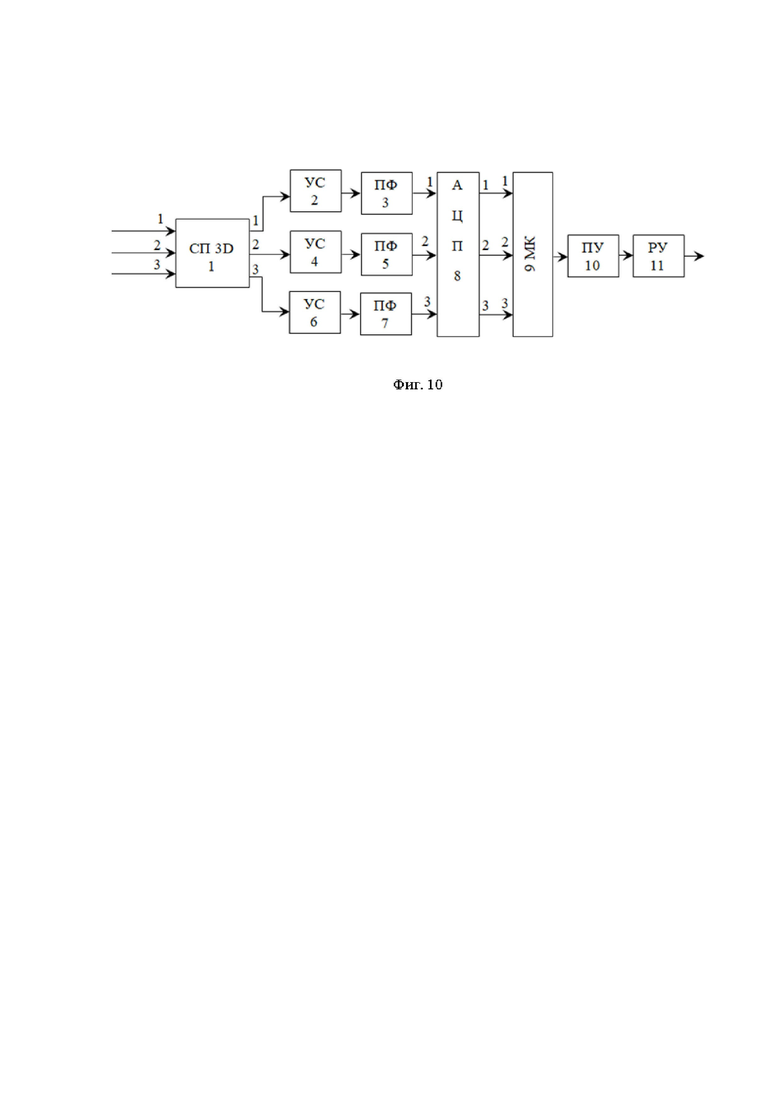
На фиг. 10 представлена укрупненная блок-схема устройства, реализующего предлагаемый способ, где введены следующие обозначения:
1 - трехкомпонентный сейсмоприемник, три оси чувствительности которого взаимно ортогональны (СП 3D);
2, 4, 6 - первый, …, третий усилители сигнала (УС);
3, 5, 7 - первый, …, полосовые фильтры (ПФ);
8 - аналого-цифровой преобразователь (АЦП);
9 - микроконтроллер (МК);
10 - пороговое устройство (ПУ);
11 - решающее устройство (РУ).
Устройство содержит трехкомпонентный сейсмоприемник 1, первый, второй и третий выходы которого соединены соответственно с входами первого 2, второго 4 и третьего 6 усилителей сигнала, выходы которых через соответствующие первый 3, второй 5 и третий 7 полосовые фильтры соединены с первым, вторым и третьим входом АЦП 8 соответственно. Первый, второй и третий выходы АЦП 8 соединены с соответствующими входами микропроцессора 9, выход которого соединен со входом порогового устройства 10, выход которого подключен к входу решающего устройства 11, выход которого является выходом всего устройства обнаружения.
Работает устройство следующим образом.
На три входа трехкомпонентного сейсмоприемника 1 поступают три взаимно ортогональные компоненты сейсмосигнала, где они преобразуются в электрические сигналы. Эти электрические сигналы с трех выходов трехкомпонентного сейсмоприемника 1 поступают на соответствующие входы усилителей сигналов 2, 4 и 6, где усиливаются до необходимой величины. С выходов этих усилителей сигналы поступают на входы соответствующих полосовых фильтров 3, 5 и 7 с полосой пропускания каждого равной Δf = 22 Гц и граничными частотами fн = 10 Гц, fв = 32 Гц. Отфильтрованные сигналы с выходов полосовых фильтров 3, 5 и 7 поступают на три соответствующих входа аналого-цифрового преобразователя 9, где подвергаются дискретизации, и с трех его выходов дискретные сигналы поступают на соответствующие входы микроконтроллера 9. В микроконтроллере 9 в зависимости от наличия или отсутствия объекта наземной техники осуществляется обработка дискретизированных компонент в соответствии с соотношениями (4) - (11). Результаты в виде значений ткущих отсчетов с выхода микроконтроллера 9 поступают на вход порогового устройства 10, где контролируется их положение относительно величины порогов Рmax и Рmin. Результат этого контроля с выхода порогового устройства 10 поступает на вход решающего устройства 11, в котором в соответствии с поведением выходных отсчетов микроконтроллера 9 относительно величины порогов Рmax и Рmin принимается решение о наличии или отсутствии в принятом сейсмосигнале признаков подвижного объекта наземной техники. Принятое решение в соответствующем формате с выхода решающего устройства 11 поступает на выход устройства обнаружения для дальнейшего использования.
Реализация данного устройства не вызывает затруднений, так как все блоки, кроме трехкомпонентного сейсмоприемника 1, являются достаточно часто используемыми в инженерных разработках и описаны в патентных документах. Особенность трехкомпонентного сейсмоприемника 1 состоит в том, что он скомпонован из трех линейных сейсмических сенсоров, оси чувствительности взаимно ортогональны. Линейные сейсмические сенсоры достаточно хорошо известны, описаны в технической литературе, например, в [5], либо используются в соответствующих устройствах, например, в [6].
Источники информации.
1. Патент РФ 2165629. Устройство обработки сейсмических сигналов для систем охранной сигнализации. МПК G01V 1/00. Крюков И.Н., Иванов В.А., Дюгованец А.П., Шуалов А.Г.
2. Патент РФ 2242799. Устройство обработки сейсмических сигналов для систем охранной сигнализации. МПК G08B 13/16, G01V 1/22. Глазунов Б.П., Груздов В.А., Окулов С.А., Ольховская И.В., Фролов С.Б.
3. Патент РФ 2365945. Способ обнаружения перемещающихся объектов по сейсмическому сигналу. МПК G01V 1/00. Дудкин В.А., Мясникова Н.В., Митрохин М.А., Фирсов М.С., Вольсков А.А.
4. Патент РФ 2568142. Способ обнаружения перемещающихся объектов по сейсмическому сигналу. МПК G01V 1/00, G08B 13/00. Вольсков А.А., Дудкин В.А., Катернюк С.С., Гостева Т.А.
5. Янчич В.В. Пьезоэлектрические акселерометры на основе монолитного блока с деформацией изгиба / В.В. Янчич // Зарубежная радиоэлектроника. - 1996. - №9, стр. 63-64.
6. Патент РФ 2204850. Сейсмоприемник. МПК G01V 1/16. Доля В.К., Круглов А.К.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2774733C1 |
| Способ обнаружения подвижных объектов наземной техники | 2021 |
|
RU2773271C1 |
| Способ классификации подвижных объектов наземной техники | 2023 |
|
RU2811811C1 |
| Способ обнаружения подвижных объектов наземной техники | 2023 |
|
RU2816287C1 |
| Способ классификации подвижных объектов наземной техники с использованием особенностей сцепления их с почвой | 2021 |
|
RU2776588C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2014 |
|
RU2568142C1 |
| Способ пеленгования подвижных объектов наземной техники одним трёхкомпонентным сейсмическим датчиком | 2022 |
|
RU2800112C1 |
| УСТРОЙСТВО И СПОСОБ ОБНАРУЖЕНИЯ ПРОНИКНОВЕНИЯ ЧЕЛОВЕКА ЧЕРЕЗ КОНТУР ЗАПРЕЩЕННОЙ ЗОНЫ | 2000 |
|
RU2209467C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СЖАТИЯ СЕЙСМИЧЕСКОГО СИГНАЛА В СКВАЖИНЕ | 2012 |
|
RU2570699C2 |
| УСТРОЙСТВО ДЛЯ АДАПТИВНОЙ СЕЙСМИЧЕСКОЙ ПЕЛЕНГАЦИИ ОБЪЕКТОВ | 2009 |
|
RU2410751C1 |
Изобретение относится к области сейсмической разведки и может быть использовано в охранно- и разведывательно-сигнализационных комплексах и системах для выявления в сейсмических колебаниях поверхностного слоя почвы признаков, характерных для движущихся объектов наземной техники любого класса. Предложен способ обнаружения движущихся объектов наземной техники по сейсмическому сигналу, включающий регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники. Согласно заявленному решению осуществляют выбор диапазона рабочих частот ΔF, характерных для сейсмических колебаний почвы, возбуждаемых объектами наземной техники классов «колесо» или «гусеница», деление этого общего диапазона частот ΔF на две полосы Δf1 и Δf2 таким образом, чтобы в каждой из этих полос концентрировалась большая часть энергии сейсмических колебаний от «своего» класса объектов наземной техники. Отклонение величины отношения энергий сейсмических колебаний в этих частотных полосах от уровня, обеспечиваемого балансом шумовых энергий в этих частотных полосах, является основным признаком обнаружения объектов наземной техники. Технический результат – повышение вероятности правильного обнаружения подвижных объектов наземной техники и снижение вероятности их ложного обнаружения путем повышения устойчивости функциональных характеристик устройства, реализующего регистрацию и обработку поступающих на его вход сейсмических колебаний, к изменению уровня внешних шумовых, помеховых или погодно-климатических условий. 10 ил.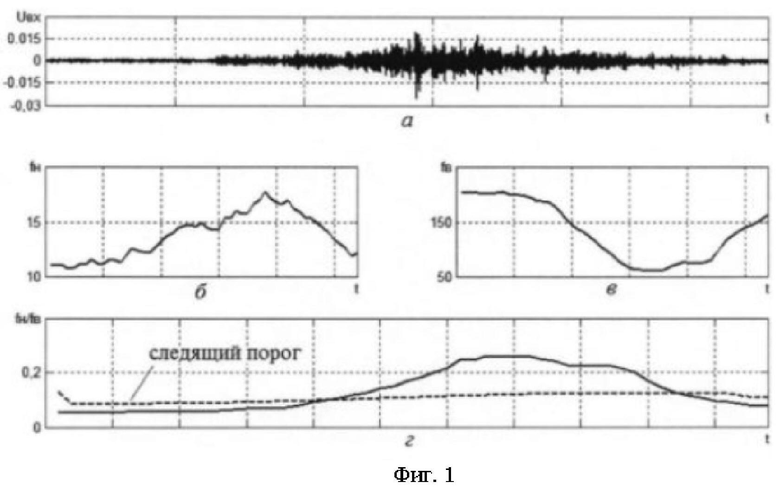
Способ обнаружения движущихся объектов наземной техники по сейсмическому сигналу, включающий регистрацию сейсмического сигнала, возбуждаемого подвижным объектом наземной техники, отличающийся тем, что в отсутствие объекта осуществляется деление выбранного диапазона рабочих частот на две полосы – низкочастотную и высокочастотную по условию равенства в них спектральных плотностей сейсмофона, периодическая оценка значения коэффициента выравнивания энергий сейсмофона в этих полосах как величины, обратной отношению усреднённой на промежутке времени наблюдения энергии сейсмофона низкочастотной полосы к усреднённой на этом же временном промежутке энергии сейсмофона высокочастотной полосы; в присутствии подвижного объекта наземной техники на длительности текущего временного окна осуществляется деление величины энергии смеси полезного сейсмосигнала и сейсмофона в низкочастотной полосе на величину энергии смеси полезного сейсмосигнала и сейсмофона в высокочастотной полосе, домножение полученного частного от деления на последнее значение выравнивающего коэффициента и сравнение текущих значений результата с двумя порогами – верхним и нижним; в случае пересечения этими текущими значениями нижнего или верхнего порогов сверху вниз или снизу вверх фиксируется факт обнаружения объекта наземной техники, в том случае когда после пересечения данными текущими значениями нижнего или верхнего порогов они остаются между этими порогами, будет реализован вариант пропуска полезного сейсмосигнала – необнаружение объекта.
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩИХСЯ НАЗЕМНЫХ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2014 |
|
RU2568142C1 |
| УСТРОЙСТВО ОБРАБОТКИ СЕЙСМИЧЕСКИХ СИГНАЛОВ ДЛЯ СИСТЕМ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2003 |
|
RU2242799C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ ПО СЕЙСМИЧЕСКОМУ СИГНАЛУ | 2008 |
|
RU2365945C1 |
| Аэродинамические весы | 1960 |
|
SU142159A1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ НА ОХРАНЯЕМОМ РУБЕЖЕ | 2000 |
|
RU2165629C1 |
| US 4106003 A, 08.08.1978. | |||

