Изобретение относится к области радиотехники и может использоваться в системах пассивной радиолокации, радиопеленгации и радиотехнического наблюдения для однопозиционного определения направлений, скоростей движения в пространстве, координат и траекторий радиоизлучающих объектов (РИО), а также их селекции по скорости движения.
Направление на РИО обычно определяется с помощью радиопеленгаторов [1 - Бакулев П.А. Радиолокационные системы. М.: Радиотехника. 2007. 376 с. С. 267], а расстояние до него - методами активной радиолокации за счет зондирования пространства излучениями радиолокационной системы (РЛС) с использованием радиодальномеров: фазовых [1 - С. 242], частотных [1 - С. 246] или импульсных [1 - С. 252].
В пассивной радиолокации прямое измерение дальности невозможно, так как зондирующие излучения не используются. В то же время пассивная радиолокация обладает определенными преимуществами [2 - Пассивная радиолокация: методы обнаружения объектов / Под ред. проф. Р.П. Быстрова и проф. А.В. Соколова. М.: Радиотехника. 2008. 320 с. С. 6], что делает привлекательным ее применение для решения ряда практических задач. Так как пассивные РЛС функционируют скрытно, существенно затрудняется определение их дислокации и характеристик, а в условиях военных конфликтов повышается живучесть систем. Наконец, при использовании пассивных РЛС отсутствуют затраты энергии на излучение, что уменьшает сложность и стоимость систем.
Отметим, что современные подвижные объекты различного назначения - ИСЗ, корабли, самолеты, беспилотные летательные аппараты, крылатые и баллистические ракеты (при испытаниях) - всегда оснащают одним или несколькими радиопередающими устройствами для обмена между собой и командными пунктами информацией с помощью сигналов систем связи, навигации, телеметрии, передачи данных и т.д. Радиопередающие устройства вышеперечисленных объектов функционируют в диапазонах частот от 0,1 до 50,0 ГГц и обычно используют широкополосные сигналы с фазовой и/или квадратурной амплитудной модуляцией различной кратности. По излучениям этих бортовых устройств с помощью пассивных РЛС может осуществляться обнаружение перемещающихся в пространстве РИО, определение их угловых координат (УК) и слежение за объектами.
Определение расположения и траекторий движения РИО системами пассивной локации является более сложной задачей. Для ее решения обычно применяют несколько разнесенных в пространстве станций, которые с помощью системы ретрансляции данных объединяются в многопозиционную систему [3 - Кондратьев B.C., Котов А.Ф., Марков Л.Н. Многопозиционные радиотехнические системы. М.: Радио и связь. 1986. 264 с.]. При этом, по сравнению с однопозиционной системой, возрастает объем используемой аппаратуры, ее сложность и стоимость. Кроме того, разнесенный прием приводит к частичному разрушению пространственно-когерентных связей между принимаемыми сигналами. Однопозиционная локация свободна от этих недостатков, но не обеспечивает без использования дополнительных данных определение наклонной дальности, скорости и траекторий движения РИО. В связи с этим поиск способов и создание устройств эффективной однопозиционной пассивной локации, обеспечивающих определение скоростей движения, координат и траекторий перемещающихся в пространстве РИО является актуальной задачей.
Известен способ однопозиционного измерения угловой скорости объекта [4 - Алпатов Б.А., Балашов О.Е. Измерение скорости объекта в системах автоматического сопровождения объектов // Вестник РГРТУ. Рязань. 2014. №4 (выпуск 50). С. 5-10]; он является аналогом заявляемого способа. В способе [4] на основании угловых измерений определяют условную скорость объекта, пропорциональную с постоянным коэффициентом его реальной скорости, в предположении, что объект движется в пространстве равномерно и прямолинейно. При этом УК объекта измеряют в  временных моментах, отстоящих друг от друга на интервал T, затем из множества возможных параллельных траекторий движения, соответствующих измеренным УК, выбирают одну условную, на которой точки A, B и C равноудалены по времени на интервал 0,5 NT, определяют проекции координат точек A, B, C в зависимости (функциональной) от соответствующих проекций линейной скорости, и наконец, задавшись значениями координат точки C, определяют значения проекций Vx, Vy, Vz, текущей линейной скорости объекта, а также саму условную линейную скорость и экстраполированные значения УК.
временных моментах, отстоящих друг от друга на интервал T, затем из множества возможных параллельных траекторий движения, соответствующих измеренным УК, выбирают одну условную, на которой точки A, B и C равноудалены по времени на интервал 0,5 NT, определяют проекции координат точек A, B, C в зависимости (функциональной) от соответствующих проекций линейной скорости, и наконец, задавшись значениями координат точки C, определяют значения проекций Vx, Vy, Vz, текущей линейной скорости объекта, а также саму условную линейную скорость и экстраполированные значения УК.
Недостатком аналога [4] является невозможность определения истинных координат, скорости и траектории движения РИО в пространстве.
Наиболее близким по технической сущности к заявляемому способу является способ определения из одной точки наклонной дальности до движущейся цели [5 - патент 2557808, РФ. Способ определения наклонной дальности до движущейся цели пассивным моностатическим пеленгатором / Борисов Е.Г., Мартемьянов И.С.], принятый за прототип. В соответствии с [5] совместно обрабатывают два последовательных во времени измерения пеленгов (углов азимута β1 и β2) и мощностей РС1 и РС2 сигналов для моментов измерений t1 и t2. Учитывая, что базовая точка измерения соответствует геометрическому центру угломерной системы, а линия Ц1ЦN (траектория движения цели) соответствует точкам Ц1 и Ц2 измерения пеленга на цель в моменты времени t1 и t2, в предположении, что цель движется прямолинейно, на основании полученных значений РС1 и РС2 вычисляют величину  . Производят два последовательных измерения частот
. Производят два последовательных измерения частот  и
и  принятых сигналов в моменты времени t1 и t2 соответственно, и на основании этих измерений определяют величину
принятых сигналов в моменты времени t1 и t2 соответственно, и на основании этих измерений определяют величину  ; далее на основании измеренных углов азимута β1 и β2 определяют Δβ21=β2-β1. После этого вычисляют дальность до цели по формуле
; далее на основании измеренных углов азимута β1 и β2 определяют Δβ21=β2-β1. После этого вычисляют дальность до цели по формуле
 1
1
где c - скорость света;
Т=Δt12.
Анализ материалов патента [5] показал, что точностные характеристики выбранного в качестве прототипа способа определяются ошибками измерения угловых координат РИО и несущих частот излучаемых им сигналов. Так, при минимально возможных точностях измерений указанных первичных параметров, погрешность определения наклонной дальности зависит от ее значения и колеблется в пределах (5-35)%.
В реальных условиях объекты наблюдения обычно излучают модулированные сигналы с подавленной несущей, что не позволяет применять способ [5], причем мощность принимаемых сигналов подвержена флюктуациям, которые вызываются интерференцией колебаний, переотраженных элементами конструкции объекта, изменениями условий распространения и переотражениями от местных предметов. Величина флюктуаций может достигать (10-15) дБ. В этом случае погрешность измерения дальности по способу [5] при коэффициенте флюктуаций Кф=6 дБ достигает 5%, а при Кф=12 дБ достигает 2,5 раз, то есть способ становится неработоспособным.
Таким образом, недостатками прототипа [5] являются большая погрешность измерения дальности из-за флюктуаций уровня сигнала и невозможность измерения дальности в случае использования в качестве сигналов сложных модулированных излучений. Это не позволяет определить местоположение РИО, а также направления, скорости и траектории движения в пространстве.
Изобретений, решающих упомянутые проблемы путем пассивной однопозиционной локации перемещающегося РИО, авторы заявляемого способа в технической литературе не обнаружили.
Задачей, на решение которой направлен предлагаемый способ, является обеспечение возможности определения координат, направления, скорости и траекторий движения РИО в пространстве, а также селекции их по скорости на основе пассивных однопозиционных измерений УК объектов и приращений доплеровских сдвигов частоты сигналов, излучаемых радиопередающими устройствами объектов.
Для решения этой задачи предлагается способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве РИО, при котором принимают радиосигналы, констатируют обнаружение сигнала РИО и определяют его параметры - ширину спектра, среднюю частоту спектра сигнала и вид модуляции, осуществляют автосопровождение объекта по угловым координатам, измеряют в моменты времени ti=iT, где i=0, 1, 2, 3, … - номера измерений, T - интервал времени между измерениями, и запоминают значения отсчетов угловых координат (азимута β и угла места ε), а также текущего времени, соответствующего этим отсчетам, представляют результаты измерений в виде зависимостей βтек(iT) и εтек(iT), фильтруют полученные зависимости для уменьшения ошибок измерений, получая усредненные зависимости  ,
,  , и используют эти зависимости в качестве первичных параметров при совместной обработке измерений.
, и используют эти зависимости в качестве первичных параметров при совместной обработке измерений.
Согласно изобретению, восстанавливают, зная вид модуляции, несущую частоту  принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов, представляют результаты в виде зависимости
принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов, представляют результаты в виде зависимости  , фильтруют полученную зависимость для уменьшения ошибок измерений, получая усредненную зависимость
, фильтруют полученную зависимость для уменьшения ошибок измерений, получая усредненную зависимость  , выбирают из зависимости
, выбирают из зависимости  и фиксируют в заданные моменты времени ti значения несущей частоты сигнала, равные
и фиксируют в заданные моменты времени ti значения несущей частоты сигнала, равные
 ,
,
где  - значение несущей частоты излучаемого сигнала;
- значение несущей частоты излучаемого сигнала;
 - доплеровские сдвиги частоты несущей в моменты времени ti;
- доплеровские сдвиги частоты несущей в моменты времени ti;
Vri - значения радиальной скорости объекта в те же моменты времени;
V - значения вектора скорости;
qi - значения курсового угла объекта;
λ - длина волны сигнала РИО;
c - скорость света.
Далее интерполируют усредненные угловые зависимости  и
и  , получая непрерывные функции β(t) и ε(t), извлекают из зависимости β(t), начиная с момента времени t0 и начального значения азимута β0, несколько значений азимута βk=β0+kΔβ, где
, получая непрерывные функции β(t) и ε(t), извлекают из зависимости β(t), начиная с момента времени t0 и начального значения азимута β0, несколько значений азимута βk=β0+kΔβ, где  - номера выбранных значений азимута, Δβ - постоянная величина, и запоминают их совместно с соответствующими значениями единого времени t0, t1, t2, …, tk, фиксируют, начиная со значения β0, значения азимута βn=β0+nΔβ, где
- номера выбранных значений азимута, Δβ - постоянная величина, и запоминают их совместно с соответствующими значениями единого времени t0, t1, t2, …, tk, фиксируют, начиная со значения β0, значения азимута βn=β0+nΔβ, где  - число приращений азимута, используемых при разностных вычислениях, вычисляют интервалы времени прохождения объектом азимутальных секторов Δβk,n=|βk-βn|, равные Δtk,n=tk-tn, интерполируют усредненную частотную зависимость
- число приращений азимута, используемых при разностных вычислениях, вычисляют интервалы времени прохождения объектом азимутальных секторов Δβk,n=|βk-βn|, равные Δtk,n=tk-tn, интерполируют усредненную частотную зависимость  , получая непрерывную функцию
, получая непрерывную функцию  , вычисляют приращения доплеровских сдвигов частоты принимаемых сигналов
, вычисляют приращения доплеровских сдвигов частоты принимаемых сигналов  на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО со скоростью V на постоянной высоте H, когда горизонтальная скорость объекта Vг=V (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk,n), а его положение в сферической системе координат определяется текущими значениями:
на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО со скоростью V на постоянной высоте H, когда горизонтальная скорость объекта Vг=V (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk,n), а его положение в сферической системе координат определяется текущими значениями:
- наклонной дальности Dтек, проекцией которой на плоскость горизонта является горизонтальная дальность dтек;
- азимута βтек, отсчитываемого против часовой стрелки от основного направления, совпадающего с осью Ox, до вектора горизонтальной дальности dтек;
- угла места εтек между наклонной и горизонтальной дальностями, связанными соотношением Dтек=dтекcosεтек;
- путевого угла Q, отсчитываемого против часовой стрелки от основного направления до горизонтальной проекции вектора скорости V при постоянном значении высоты H;
- курсового угла qтек, отсчитываемого против часовой стрелки от горизонтальной проекции вектора скорости до вектора горизонтальной дальности, причем qтек=βтек+α, Q+qтек=βтек+180°, Q=180°-α, где α - угол между вектором скорости Vг и осью 0x; определяют горизонтальные составляющие приращений доплеровских сдвигов частоты как
 ,
,
находят, задавая значения k=2 и 4, n=0 и 2, приращения доплеровских сдвигов частоты на интервалах Δt2,0, Δt4,2, Δt4,0 по формулам
 ,
,
 ,
,
 ,
,
вычисляют величину отношения
 ,
,
находят, решая полученное уравнение, значение tgα и вычисляют величину угла
 ,
,
определяют текущее значение курсового угла qk=βk+α и, используя уравнение для приращения доплеровского сдвига частоты на интервале Δt4,0, модуль горизонтальной скорости  , а затем - расстояние, пройденное РИО за интервал времени Δt4,0, в виде
, а затем - расстояние, пройденное РИО за интервал времени Δt4,0, в виде
 ,
,
определяют радиус  окружности, проходящей через начало координат, хордой которой является расстояние S4,0, находят центр O' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90°, рассчитывают дальности d0 и d4 из соотношения
окружности, проходящей через начало координат, хордой которой является расстояние S4,0, находят центр O' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90°, рассчитывают дальности d0 и d4 из соотношения  в виде
в виде
 ,
,
определяя координаты РИО в моменты времени t0 и t4 как точки пересечения окружности с центром O' и лучей длиной d0 и d4, проведенных из начала координат под углами β0 и β4, вычисляют интерполированные dk=1,2,3 и экстраполированные dk≥4 значения дальностей на интервале сохранения гипотезы о равномерном и прямолинейном движении РИО на постоянной высоте по формулам
 при k=1, 2, 3 и n=4,
при k=1, 2, 3 и n=4,
 при k≥4 и n=4,
при k≥4 и n=4,
определяют наклонные дальности и высоты как
 и
и ,
,
где  и
и  - значения косинуса и тангенса угла места в моменты времени tk, осуществляют построение траектории движения РИО в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение, при этом критерием сохранения гипотезы о равномерном и прямолинейном движении РИО является выполнение неравенств
- значения косинуса и тангенса угла места в моменты времени tk, осуществляют построение траектории движения РИО в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение, при этом критерием сохранения гипотезы о равномерном и прямолинейном движении РИО является выполнение неравенств
|α-αi|<Δαi, |V-Vi|<ΔVi, |H-Hi|<ΔHi,
где Δα, ΔV, ΔH - пороговые значения величин α, V, H, определяющие размеры участка кусочно-линейной аппроксимации траектории, вычисляют, в случае изменения высоты РИО, при |Hk-Hn|≥ΔH значение угла γ пикирования (кабрирования) как  , а расчеты величин α, V, D производят, используя в вышеприведенных формулах значение Vг=Vcosγ, фиксируют в момент, когда перестают выполняться неравенства |α-αi|<Δαi и |V-Vi|<ΔVi, начало маневра объекта, после чего задают новые начальные значения азимута для следующего участка кусочно-линейной аппроксимации траектории и повторяют расчеты ее параметров α, V, D, H для построения траектории движения РИО в пространстве на интервале наблюдения.
, а расчеты величин α, V, D производят, используя в вышеприведенных формулах значение Vг=Vcosγ, фиксируют в момент, когда перестают выполняться неравенства |α-αi|<Δαi и |V-Vi|<ΔVi, начало маневра объекта, после чего задают новые начальные значения азимута для следующего участка кусочно-линейной аппроксимации траектории и повторяют расчеты ее параметров α, V, D, H для построения траектории движения РИО в пространстве на интервале наблюдения.
В случае, если траектория движения РИО находится в плоскости наблюдения (вертикальной), т.е. азимут объекта с течением времени не изменяется (βiT=const), после получения непрерывной функции ε(t), извлекают из нее, начиная с момента времени t0, несколько значений угла места εk=ε0+kΔε, где  - номера выбранных значений угла места, отстоящих от начального значения ε0 на величины kΔε, запоминают их совместно с соответствующими значениями единого времени в моменты tk, вычисляют интервал времени прохождения объектом угломестных секторов Δεk,n=4Δε как Δt4,0=t4-t0, для n=0 и 4, фиксируют в моменты времени t0, t4 текущие значения несущей частоты сигнала РИО, равные
- номера выбранных значений угла места, отстоящих от начального значения ε0 на величины kΔε, запоминают их совместно с соответствующими значениями единого времени в моменты tk, вычисляют интервал времени прохождения объектом угломестных секторов Δεk,n=4Δε как Δt4,0=t4-t0, для n=0 и 4, фиксируют в моменты времени t0, t4 текущие значения несущей частоты сигнала РИО, равные  , где
, где  , вычисляют приращение доплеровского сдвига несущей на интервале Δt4,0 как
, вычисляют приращение доплеровского сдвига несущей на интервале Δt4,0 как  , определяют величину модуля вектора скорости РИО на интервале времени Δt4,0 как
, определяют величину модуля вектора скорости РИО на интервале времени Δt4,0 как  , а затем расстояние, пройденное радиоизлучающим объектом за интервал Δt4,0, как ΔS=VΔt4,0, а также радиус
, а затем расстояние, пройденное радиоизлучающим объектом за интервал Δt4,0, как ΔS=VΔt4,0, а также радиус  описывающей окружности, проходящей через начало координат, у которой хордой является расстояние ΔS, определяют центр Oʺ этой окружности, фиксируя точку на конце луча длиной R', проведенного из начала координат 0 под углом εЦ=2ε0-90°+4Δε, рассчитывают дальности до объекта из соотношения
описывающей окружности, проходящей через начало координат, у которой хордой является расстояние ΔS, определяют центр Oʺ этой окружности, фиксируя точку на конце луча длиной R', проведенного из начала координат 0 под углом εЦ=2ε0-90°+4Δε, рассчитывают дальности до объекта из соотношения  в виде
в виде  ,
,  , а также высоты H0(4)=D0(4)sinε0(4), определяя координаты РИО как точки пересечения окружности с центром Oʺ и лучей длиной D0 и D4, проведенных из начала координат под углами ε0 и ε4, после чего осуществляют построение траектории движения РИО в пространстве, задавая значения угла места из ряда εтек(ti) и повторяя расчеты значений Δti, Vi, Di, Hi по вышеприведенным формулам, проверяя при этом справедливость гипотезы о равномерном и прямолинейном движении РИО.
, а также высоты H0(4)=D0(4)sinε0(4), определяя координаты РИО как точки пересечения окружности с центром Oʺ и лучей длиной D0 и D4, проведенных из начала координат под углами ε0 и ε4, после чего осуществляют построение траектории движения РИО в пространстве, задавая значения угла места из ряда εтек(ti) и повторяя расчеты значений Δti, Vi, Di, Hi по вышеприведенным формулам, проверяя при этом справедливость гипотезы о равномерном и прямолинейном движении РИО.
Техническим результатом, достигаемым при использовании предложенного способа, является возможность определения с достаточной точностью направления движения (курсового угла), абсолютного значения линейной скорости, наклонной дальности и траектории движения радиоизлучающего объекта, что позволяет средствами пассивной однопозиционной локации решать задачи навигации, управления движением и селекции движущихся РИО.
Аналогом заявляемого устройства - пассивной угломерно-разностно-доплеровской РЛС, реализующей предложенный способ - является однопозиционная наземная радиолокационная станция [6 - патент 2217773, РФ. Способ определения координат источника радиоизлучения и радиолокационная станция для его реализации / Беляев Б.Г., Голубев Г.Н., Жибинов В.А., Кисляков В.И., Лужных С.Н.], содержащая пассивный канал обнаружения, активный канал обнаружения, а также блок вычисления координат (БВК). Пассивный канал содержит последовательно соединенные антенну и приемник, а активный канал - антенну, антенный переключатель, передатчик, приемник, устройство вычисления дальности и синхронизатор БВК, который содержит последовательно соединенные устройство измерения сдвига принимаемых сигналов во времени и вычислитель координат. При этом выходы пассивного и активного каналов обнаружения подключены ко входам БВК, а выход БВК является выходом радиолокационной станции.
Сначала в аналоге [6] производится обнаружение источника радиоизлучения пассивным каналом, при этом антенна пассивного канала ориентируется в сторону источника и принимает его прямое излучение, что позволяет по ее положению определить УК источника. Далее с помощью активного канала в пассивном режиме производится обнаружение некоего отражающего объекта (антенна активного канала принимает отраженное от него излучение) и определяются его УК. Одновременно измеряется взаимная корреляционная функция сигналов, принятых обоими каналами, позволяющая найти их временной сдвиг. Затем с помощью активного канала обнаружения в активном режиме производится измерение дальности до источника, обнаруженного в пассивном режиме. Таким образом, аналог [6] не является чисто пассивной РЛС - в нем используются методы и пассивной, и активной радиолокации.
Недостатками аналога [6] являются необходимость существования в контролируемой зоне пространства дополнительного отражающего объекта, а также введение в состав радиолокационной станции дополнительного активного канала обнаружения с передатчиком.
В качестве прототипа заявляемого устройства (пассивной однопозиционной угломерно-разностно-доплеровской РЛС), реализующего предложенный способ, выбрано устройство из патента 2557808, РФ [5]. Это устройство содержит антенну, приемное устройство, измеритель мощности, угломерное устройство, измеритель частоты и вычислительное устройство. При этом выход антенны соединен со входом приемного устройства, первый выход которого соединен со входом измерителя мощности, второй выход - со входом угломерного устройства, а третий - со входом измерителя частоты. Выход измерителя мощности, угломерного устройства и измерителя частоты соединен соответственно с первым, вторым и третьим входами вычислительного устройства, выход которого является выходом устройства-прототипа.
Устройство из патента [5] работает следующим образом. Принятый антенной сигнал подается на вход приемного устройства, осуществляющего процедуру обнаружения и усиления сигналов до требуемого уровня. С первого выхода приемного устройства сигналы поступают в измеритель мощности, где оценивается мощность принятого сигнала. Со второго выхода приемного устройства сигналы поступают в угломерное устройство, где оцениваются УК объекта. С третьего выхода приемного устройства сигналы поступают в измеритель частоты, где оценивается частота принятого сигнала. Данные с выходов измерителя мощности, угломерного устройства и измерителя частоты подаются в вычислительное устройство, осуществляющего обработку двух последовательных во времени измерений пеленгов (углов азимута β1 и β2) и мощностей PC1 и PC2 сигналов, принимаемых автономной угломерной системой для рассматриваемых моментов измерений t1 и t2, учитывая, что базовая точка измерения соответствует геометрическому центру автономной угломерной системы, а линия Ц1ЦN (траектория движения цели) соответствует точкам Ц1 и Ц2 измерения пеленга на цель в моменты времени t1 и t2, предполагая, что цель движется прямолинейно. На основании полученных значений PC1 и PC2 вычисляют величину  , дополнительно производят два последовательных измерения частот
, дополнительно производят два последовательных измерения частот  и
и  принятого сигнала в моменты времени измерений t1 и t2 соответственно, и определяют величину
принятого сигнала в моменты времени измерений t1 и t2 соответственно, и определяют величину  , а на основании измеренных углов азимута β1 и β2 определяют Δβ21=β2-β1. После этого вычисляют дальность до цели по формуле
, а на основании измеренных углов азимута β1 и β2 определяют Δβ21=β2-β1. После этого вычисляют дальность до цели по формуле
 ,
,
где c - скорость света;
T=Δt12.
Недостатками устройства-прототипа [6] являются большая погрешность измерения дальности в случае флюктуаций уровней сигнала и невозможность измерения дальности при использовании в качестве сигналов сложных модулированных излучений.
Задачей, на решение которой направлено создание пассивной однопозиционной угломерно-разностно-доплеровской РЛС, реализующей предложенный способ, является обеспечение возможности определения направления и скорости движения, местоопределения и траектории движения РИО в пространстве с достаточной точностью при приеме флюктуирующих сигналов, а также селекции объектов по скорости на основе только пассивных однопозиционных измерений.
Для решения указанной задачи предлагается пассивная однопозиционная угломерно-разностно-доплеровская РЛС, содержащая последовательно включенные антенно-фидерную систему и радиоприемную систему, соединенную своими первым и вторым выходами со входами соответственно измерителя мощности и параметров сигналов и угломерного устройства, выходы которых соединены с первым, вторым, третьим и четвертым входами устройства вычисления, управления и синхронизации.
Согласно изобретению, в РЛС дополнительно введены устройство восстановления несущей частоты сигнала, устройство формирования отсчетов несущей, устройство формирования отсчетов угловых координат, устройство формирования отсчетов времени, устройство регистрации данных, измеритель приращений частоты, угловых координат и времени, вычислитель курсового угла, скорости и приращений положения и вычислитель линий положения, причем выход устройства формирования отсчетов времени подключен к пятому входу устройства вычисления, управления и синхронизации, а шестой и седьмой выходы устройства вычисления, управления и синхронизации соединены с первым и вторым входами устройства восстановления несущей, выход которого через УФОН подключен к первому входу устройства регистрации данных, второй вход устройства формирования отсчетов несущей подключен к восьмому выходу устройства вычисления, управления и синхронизации, соединенному также с управляющим входом устройства формирования отсчетов угловых координат, к первому и второму сигнальным входам которого подключены девятый и десятый выходы устройства вычисления, управления и синхронизации, при этом третий и четвертый выходы устройства формирования отсчетов угловых координат соединены с одиннадцатым и двенадцатым входами устройства вычисления, управления и синхронизации, а пятый и шестой выходы устройства формирования отсчетов угловых координат - со вторым и третьим входами устройства регистрации данных, выход которого соединен с последовательно включенными измерителем приращений частоты, угловых координат и времени, вычислителем курсового угла, скорости и приращений положения и вычислителем линий положения, причем выход вычислителя линий положения соединен с пятнадцатым входом устройства вычисления, управления и синхронизации, тринадцатый выход устройства вычисления, управления и синхронизации подключен к четвертому входу устройства регистрации данных, а четырнадцатый выход устройства вычисления, управления и синхронизации - к третьему входу измерителя приращений частоты, угловых координат и времени, второй выход которого соединен со входом данных устройства регистрации данных, а шестнадцатый выход устройства вычисления, управления и синхронизации является выходом системы.
Техническим результатом применения предложенного устройства является возможность однопозиционного измерения в пассивном режиме направления движения РИО (курсового угла), величины модуля линейной скорости, наклонной дальности и траектории движении РИО, что позволяет решать задачи навигации, управления движением и селекции движущихся РИО.
Предложенные способ и устройство не известны в современной радиотехнике, а также не известны источники информации, содержащие сведения об аналогичных технических решениях, имеющих признаки, сходные с признаками, отличающими заявляемые решения от прототипов, а также свойства, совпадающие со свойствами заявляемых решений. Поэтому можно считать, что предложенные изобретения обладают существенными отличиями, вытекающими из известных решений неочевидным образом и, следовательно, соответствуют критериям «новизна» и «изобретательский уровень».
Достижение заявленного технического результата поясним с помощью следующих фигур, на которых представлены:
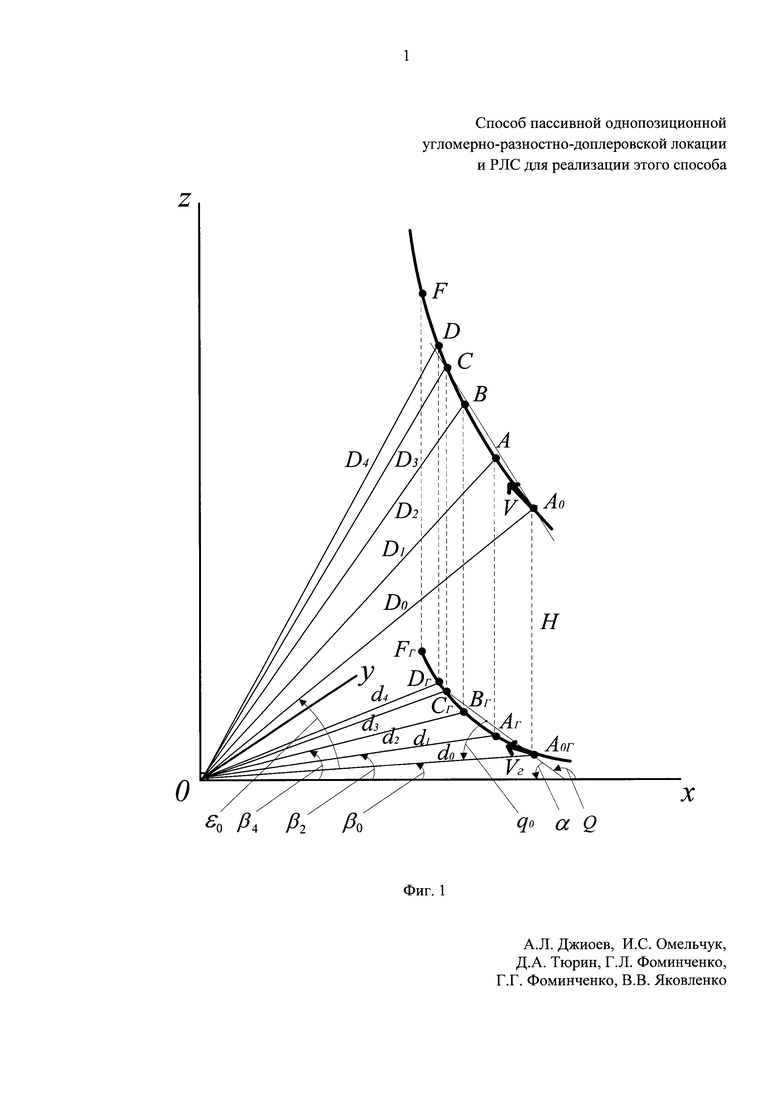
- геометрия задачи в сферической системе координат (фигура 1);
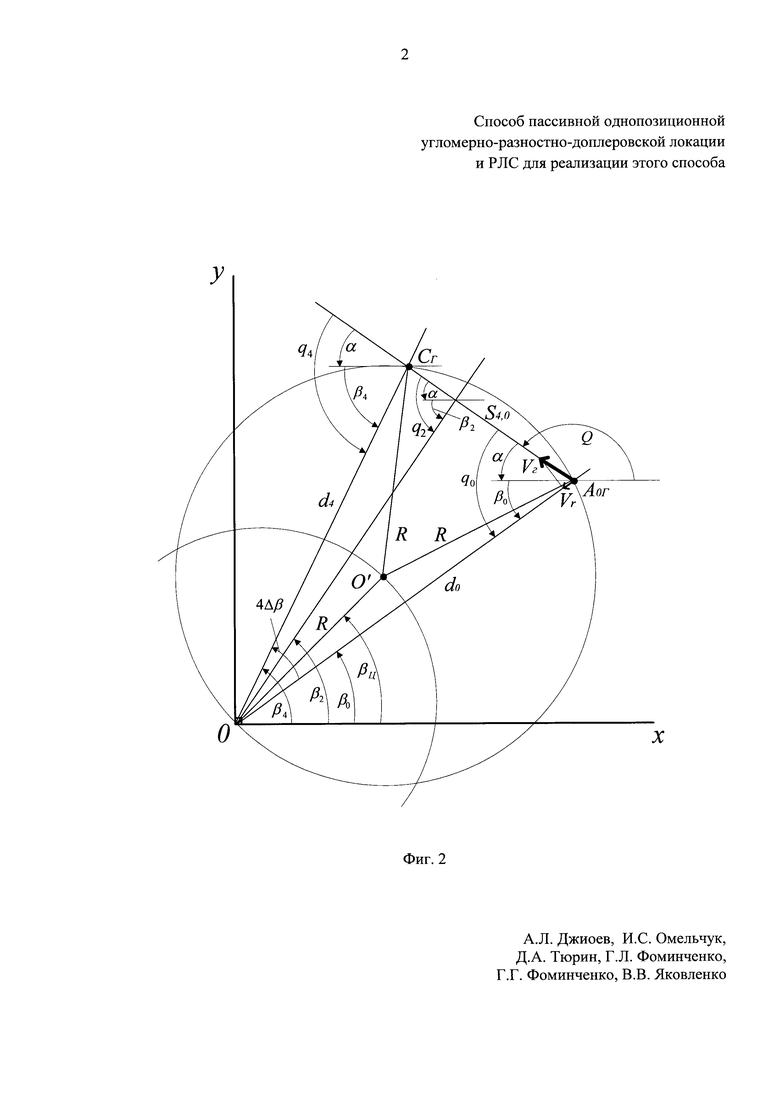
- процесс взаимодействия пассивной однопозиционной угломерно-разностно-доплеровской локационной системы и РИО в горизонтальной плоскости (фигура 2);
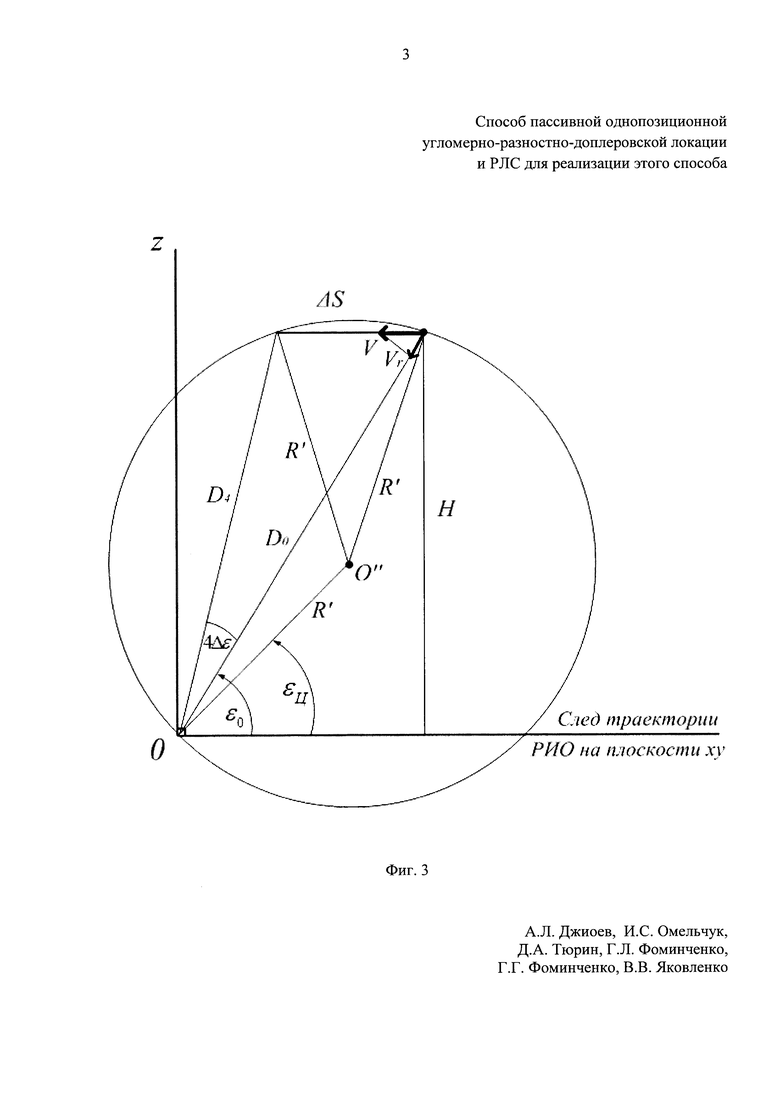
- геометрия задачи для случая, когда траектория движения РИО расположена в вертикальной плоскости наблюдения (фигура 3);
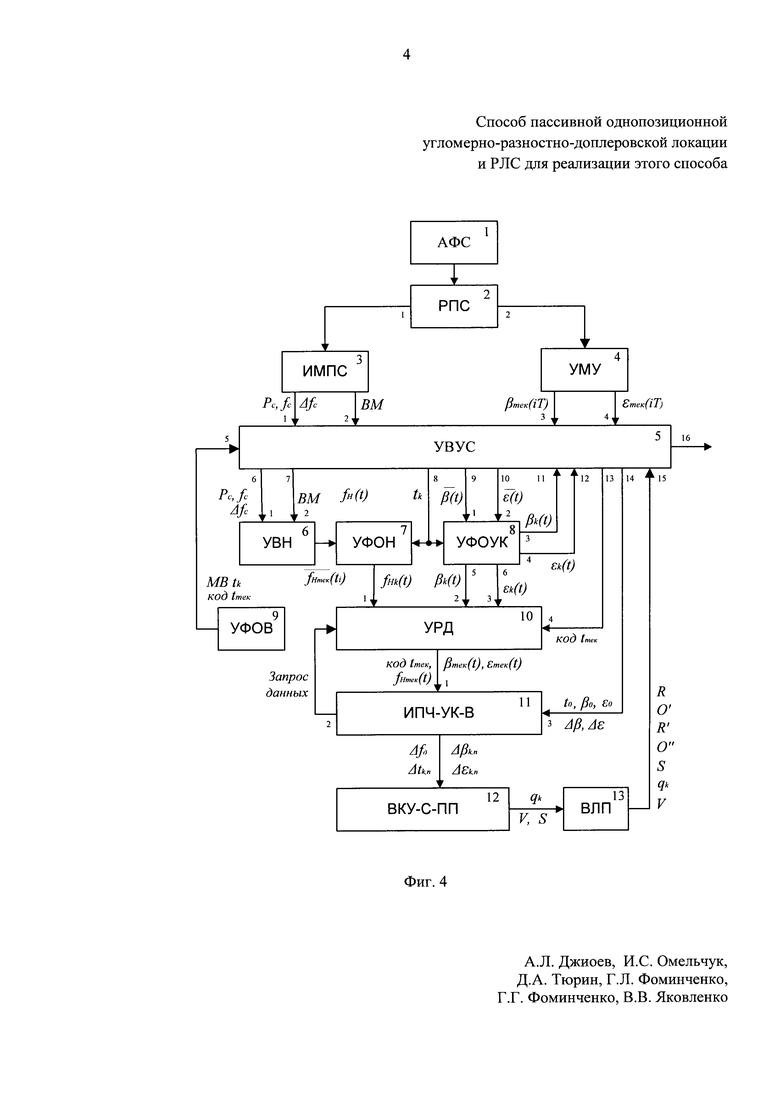
- схема электрическая структурная системы, реализующей предложенный способ (фигура 4).
На фигуре 1 пассивная однопозиционная угломерно-разностно-доплеровская локационная система находится в начале 0 сферической системы координат, а РИО движется в пространстве по траектории A0F со скоростью V на постоянной высоте H.
При реализации предложенного способа выполняется следующая последовательность операций.
Принимают радиосигналы, констатируют обнаружение сигнала РИО и определяют его параметры - ширину спектра, среднюю частоту спектра сигнала и вид модуляции. Осуществляют автосопровождение объекта по угловым координатам. Измеряют в моменты времени ti=iT, где i=0, 1, 2, 3, … - номера измерений, T - интервал времени между измерениями, и запоминают значения отсчетов угловых координат (азимута β и угла места ε), а также текущего времени, соответствующего этим отсчетам - 1.
Представляют результаты измерений в виде зависимостей βтек(iT) и εтек(iT). Фильтруют полученные зависимости для уменьшения ошибок измерений, получая усредненные зависимости  ,
,  , и используют эти зависимости в качестве первичных параметров при совместной обработке измерений - 2.
, и используют эти зависимости в качестве первичных параметров при совместной обработке измерений - 2.
В соответствии с изобретением, восстанавливают, зная вид модуляции, несущую частоту  принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов, представляют результаты в виде зависимости , фильтруют полученную зависимость для уменьшения ошибок измерений, получая усредненную зависимость
принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов, представляют результаты в виде зависимости , фильтруют полученную зависимость для уменьшения ошибок измерений, получая усредненную зависимость  .
.
Выбирают из зависимости  и фиксируют в заданные моменты времени ti значения несущей частоты сигнала, равные
и фиксируют в заданные моменты времени ti значения несущей частоты сигнала, равные
 ,
,
где  - значение несущей частоты излучаемого сигнала;
- значение несущей частоты излучаемого сигнала;
 - доплеровские сдвиги частоты несущей в моменты времени ti;
- доплеровские сдвиги частоты несущей в моменты времени ti;
Vri - значения радиальной скорости объекта в те же моменты времени;
V - значения вектора скорости РИО1 (1Движение РИО на рассматриваемом участке считается равномерным и прямолинейным; если движение происходит по криволинейной траектории, то, как показано на фигуре 1, осуществляется ее кусочно-линейная аппроксимация.);
qi - значения курсового угла объекта;
c - скорость света;
λ - длина волны сигнала РИО - 4.
Интерполируют усредненные угловые зависимости  и
и  , получая непрерывные функции β(t) и ε(t). Извлекают из зависимости β(t), начиная с момента времени t0 и начального значения азимута β0, несколько значений азимута βk=β0+kΔβ, где
, получая непрерывные функции β(t) и ε(t). Извлекают из зависимости β(t), начиная с момента времени t0 и начального значения азимута β0, несколько значений азимута βk=β0+kΔβ, где  - номера выбранных значений азимута, Δβ - постоянная величина - приращение азимута, и запоминают их совместно с соответствующими значениями единого времени t0, t1, t2, …, tk. Фиксируют, начиная со значения β0, значения азимута βn=β0+nΔβ, где
- номера выбранных значений азимута, Δβ - постоянная величина - приращение азимута, и запоминают их совместно с соответствующими значениями единого времени t0, t1, t2, …, tk. Фиксируют, начиная со значения β0, значения азимута βn=β0+nΔβ, где  - число приращений азимута, используемых при разностных вычислениях, и вычисляют интервалы времени прохождения объектом азимутальных секторов Δβk,n=|βk-βn|, равные Δtk,n=tk-tn - 5.
- число приращений азимута, используемых при разностных вычислениях, и вычисляют интервалы времени прохождения объектом азимутальных секторов Δβk,n=|βk-βn|, равные Δtk,n=tk-tn - 5.
Интерполируют усредненную частотную зависимость  , получая непрерывную функцию
, получая непрерывную функцию  .
.
Вычисляют приращения доплеровских сдвигов частоты принимаемых сигналов  на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО со скоростью V на постоянной высоте H, когда горизонтальная скорость объекта Vг=V (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk,n), а его положение в сферической системе координат определяется текущими значениями:
на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО со скоростью V на постоянной высоте H, когда горизонтальная скорость объекта Vг=V (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk,n), а его положение в сферической системе координат определяется текущими значениями:
- наклонной дальности Dтек, проекцией которой на плоскость горизонта является горизонтальная дальность dтек;
- азимута βтек, отсчитываемого против часовой стрелки от основного направления, совпадающего с осью Ox, до вектора горизонтальной дальности dтек;
- угла места εтек между наклонной и горизонтальной дальностями, связанными соотношением Dтек=dтекcosεтек;
- путевого угла Q, отсчитываемого против часовой стрелки от основного направления до горизонтальной проекции вектора скорости V при постоянном значении высоты H;
- курсового угла qтек, отсчитываемого против часовой стрелки от горизонтальной проекции вектора скорости до вектора горизонтальной дальности, причем qтек=βтек+α, Q+qтек=βтек+180°, Q=180°-α, где α - угол между вектором скорости Vг и осью 0x.
Определяют горизонтальные составляющие приращений доплеровских сдвигов частоты как
 .
.
Геометрическая интерпретация приведенных выше соотношений представлена на фигуре 2.
Далее находят, задавая значения k=2 и 4, n=0 и 2, приращения доплеровских сдвигов частоты на интервалах Δt2,0, Δt4,2, Δt4,0 по формулам
 ,
,
 ,
,
 .
.
Вычисляют величину отношения

и, решая полученное уравнение, находят значение tgα, откуда получают величину угла
 .
.
Определяют в соответствии с фигурой 2 текущее значение курсового угла как qk=βk+α. Используя уравнение для приращения доплеровского сдвига частоты на интервале Δt4,0, находят модуль горизонтальной скорости  , а затем - расстояние, пройденное РИО за интервал времени Δt4,0, в виде
, а затем - расстояние, пройденное РИО за интервал времени Δt4,0, в виде
 .
.
После этого определяют радиус  окружности, проходящей через начало координат, хордой которой является расстояние S4,0, и находят центр O' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90° - 11.
окружности, проходящей через начало координат, хордой которой является расстояние S4,0, и находят центр O' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90° - 11.
Затем рассчитывают дальности d0 и d4 из соотношения  в виде
в виде  , определяя координаты РИО в моменты времени t0 и t4 как точки пересечения окружности с центром O' и лучей длиной d0 и d4, проведенных из начала координат под углами β0 и β4 - 12.
, определяя координаты РИО в моменты времени t0 и t4 как точки пересечения окружности с центром O' и лучей длиной d0 и d4, проведенных из начала координат под углами β0 и β4 - 12.
Далее вычисляют интерполированные dk=1,2,3 и экстраполированные dk≥4 значения дальностей на интервале сохранения гипотезы о равномерном и прямолинейном движении РИО на постоянной высоте по формулам
 при k=1, 2, 3 и n=4,
при k=1, 2, 3 и n=4,
 при k≥4 и n=4,
при k≥4 и n=4,
после чего определяют наклонные дальности и высоты как
 и
и  ,
,
где  и
и  - значения косинуса и тангенса угла места в моменты времени tk - 13.
- значения косинуса и тангенса угла места в моменты времени tk - 13.
Затем осуществляют построение траектории движения РИО в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение, при этом критерием сохранения гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта является выполнение неравенств
|α-αi|<Δαi, |V-Vi|<ΔVi, |H-Hi|<ΔHi,
где Δα, ΔV, ΔH - пороговые значения величин α, V, H, определяющие размеры участка кусочно-линейной аппроксимации траектории. В случае изменения высоты РИО вычисляют при |Hk-Hn|≥ΔH значение угла γ пикирования (кабрирования) как  , а расчеты величин α, V, D производят, используя в вышеприведенных формулах значение Vг=Vcosγ - 14.
, а расчеты величин α, V, D производят, используя в вышеприведенных формулах значение Vг=Vcosγ - 14.
В момент, когда перестают выполняться неравенства |α-αi|<Δαi и |V-Vi|<ΔVi, фиксируют начало маневра объекта, после чего задают новые начальные значения азимута для следующего участка кусочно-линейной аппроксимации траектории и повторяют расчеты ее параметров α, V, D, H для построения траектории движения радиоизлучающего объекта в пространстве на интервале наблюдения - 15.
Геометрия задачи, когда траектория движения РИО находится в плоскости наблюдения (вертикальной), т.е. его азимут с течением времени не изменяется, представлена на фигуре 3. В этом случае для построения траектории движения РИО выполняется следующая последовательность операций.
После получения непрерывной функции ε(t), извлекают из нее, начиная с момента времени t0, несколько значений угла места εk=ε0+kΔε, где  - номера выбранных значений угла места, отстоящих от начального значения ε0 на величины kΔε, и запоминают их совместно с соответствующими значениями единого времени в моменты tk. Вычисляют интервал времени прохождения объектом угломестных секторов Δεk,n=4Δε как Δt4,0=t4-t0, для n=0 и 4, фиксируют в моменты времени t0, t4 текущие значения несущей частоты сигнала РИО, равные
- номера выбранных значений угла места, отстоящих от начального значения ε0 на величины kΔε, и запоминают их совместно с соответствующими значениями единого времени в моменты tk. Вычисляют интервал времени прохождения объектом угломестных секторов Δεk,n=4Δε как Δt4,0=t4-t0, для n=0 и 4, фиксируют в моменты времени t0, t4 текущие значения несущей частоты сигнала РИО, равные  , где
, где  , вычисляют приращение доплеровского сдвига частоты несущей на интервале Δt4,0 как
, вычисляют приращение доплеровского сдвига частоты несущей на интервале Δt4,0 как  .
.
Далее определяют величину модуля вектора скорости РИО на интервале времени Δt4,0 как  , а затем расстояние, пройденное радиоизлучающим объектом за интервал Δt4,0, как ΔS=VΔt4,0, а также радиус
, а затем расстояние, пройденное радиоизлучающим объектом за интервал Δt4,0, как ΔS=VΔt4,0, а также радиус  описывающей окружности, проходящей через начало координат, у которой хордой является расстояние ΔS. Определяют центр Oʺ этой окружности, фиксируя точку на конце луча длиной R', проведенного из начала координат 0 под углом εЦ=2ε0-90°+4Δε - 17.
описывающей окружности, проходящей через начало координат, у которой хордой является расстояние ΔS. Определяют центр Oʺ этой окружности, фиксируя точку на конце луча длиной R', проведенного из начала координат 0 под углом εЦ=2ε0-90°+4Δε - 17.
Затем рассчитывают дальности до объекта из соотношения  в виде
в виде  ,
,  , а также высоты H0(4)=D0(4)sinε0(4), определяя координаты радиоизлучающего объекта как точек пересечения окружности с центром Oʺ и лучей длиной D0 и D4, проведенных из начала координат под углами ε0 и ε4 - 18.
, а также высоты H0(4)=D0(4)sinε0(4), определяя координаты радиоизлучающего объекта как точек пересечения окружности с центром Oʺ и лучей длиной D0 и D4, проведенных из начала координат под углами ε0 и ε4 - 18.
После этого осуществляют построение траектории движения РИО в пространстве, задавая значения угла места из ряда εтек(ti) и повторяя расчеты значений Δti, Vi, Di, Hi по вышеприведенным формулам, проверяя при этом справедливость гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта - 19.
Примером реализации предложенного способа является пассивная однопозиционная угломерно-разностно-доплеровская РЛС, структурная схема которой приведена на фигуре 4, где приняты следующие обозначения:
1 - антенно-фидерная система (АФС);
2 - радиоприемная система (РПС);
3 - измеритель мощности и параметров сигналов (ИМПС);
4 - угломерное устройство (УМУ);
5 - устройство вычисления, управления и синхронизации (УВУС);
6 - устройство восстановления несущей (УВН);
7 - устройство формирования отсчетов несущей (УФОН);
8 - устройство формирования отсчетов угловых координат (УФОУК);
9 - устройство формирования отсчетов времени (УФОВ);
10 - устройство регистрации данных (УРД);
11 - измеритель приращений частоты, угловых координат и времени (ИПЧ-УК-В);
12 - вычислитель курсового угла, скорости и приращений положения (ВКУ-С-ПП);
13 - вычислитель линий положения (ВЛП).
Заявляемое устройство - пассивная однопозиционная угломерно-разностно-доплеровская РЛС - содержит (фигура 4) последовательно включенные антенно-фидерную систему и радиоприемную систему, соединенную своими первыми и вторым выходами со входами соответственно ИМПС и УМУ, выходы которых соединены с первым, вторым, третьим и четвертым входами УВУС.
В заявляемую РЛС дополнительно введены устройство формирования отсчетов времени, устройство восстановления несущей частоты сигнала, устройство формирования отсчетов несущей, устройство формирования отсчетов угловых координат, устройство регистрации данных, измеритель приращений частоты, угловых координат и времени, вычислитель курсового угла, скорости и приращений положения и вычислитель линий положения, причем выход устройства формирования отсчетов времени подключен к пятому входу устройства вычисления, управления и синхронизации, а шестой и седьмой выходы устройства вычисления, управления и синхронизации соединены с первым и вторым входами устройства восстановления несущей, выход которого подключен к первому входу устройства регистрации данных через устройство формирования отсчетов несущей, второй вход устройства формирования отсчетов несущей подключен к восьмому выходу устройства вычисления, управления и синхронизации, соединенному также с управляющим входом устройства формирования отсчетов угловых координат, к первому и второму сигнальным входам которого подключены девятый и десятый выходы устройства вычисления, управления и синхронизации, при этом третий и четвертый выходы устройства формирования отсчетов угловых координат соединены с одиннадцатым и двенадцатым входами устройства вычисления, управления и синхронизации, а пятый и шестой выходы устройства формирования отсчетов угловых координат - со вторым и третьим входами устройства регистрации данных, выход которого соединен с первым входом измерителя приращений частоты, угловых координат и времени, выход которого подключен ко входу вычислителя курсового угла, скорости и приращений положения, соединенного своим выходом со входом вычислителя линий положения, выход которого соединен с пятнадцатым входом устройства вычисления, управления и синхронизации, причем тринадцатый выход устройства вычисления, управления и синхронизации подключен к четвертому входу устройства регистрации данных, а четырнадцатый выход устройства вычисления, управления и синхронизации - к третьему входу измерителя приращений частоты, угловых координат и времени, второй выход которого соединен со входом данных устройства регистрации данных, а шестнадцатый выход устройства вычисления, управления и синхронизации является выходом системы.
РЛС работает следующим образом. После включения АФС 1 принимает радиосигналы, которые подаются их на вход РПС 2, где осуществляется их усиление и преобразование по частоте, а также констатируется обнаружение сигнала РИО. Напряжение с выходов РПС 2 подается параллельно на входы ИМПС 3 и УМУ 4. В ИМПС 3 определяют мощность и параметры сигнала - ширину спектра, среднюю частоту спектра сигнала и вид модуляции. В УМУ 4 определяют УК объекта и инициируют автосопровождение объекта по угловым координатам. Измеряют в моменты времени ti=iT, где i=0, 1, 2, 3, … - номера измерений, T - интервал времени между измерениями, и запоминают значения отсчетов УК (азимута β и угла места ε). Представляют результаты измерений в виде зависимостей βтек(iT), εтек(iT). Фильтруют в УВУС 5 полученные зависимости для уменьшения ошибок измерений, получая усредненные зависимости  ,
,  , и используют эти зависимости в качестве первичных параметров при совместной обработке последовательных во времени измерений.
, и используют эти зависимости в качестве первичных параметров при совместной обработке последовательных во времени измерений.
В УВН 6 восстанавливают, зная вид модуляции, несущую частоту  сигнала. Измеряют в моменты времени ti=iT и запоминают значения отсчетов несущей частоты
сигнала. Измеряют в моменты времени ti=iT и запоминают значения отсчетов несущей частоты  , а также текущего времени, соответствующего этим отсчетам. Представляют результаты измерений в виде зависимости
, а также текущего времени, соответствующего этим отсчетам. Представляют результаты измерений в виде зависимости  . Фильтруют ее для уменьшения ошибок измерений, получая усредненную зависимость
. Фильтруют ее для уменьшения ошибок измерений, получая усредненную зависимость  , и используют эту зависимость в качестве первичного параметра при совместной обработке последовательных во времени измерений. В УФОН 7 выбирают из зависимости
, и используют эту зависимость в качестве первичного параметра при совместной обработке последовательных во времени измерений. В УФОН 7 выбирают из зависимости  и фиксируют в заданные моменты времени ti усредненные значения несущей частоты сигнала, равные
и фиксируют в заданные моменты времени ti усредненные значения несущей частоты сигнала, равные
 ,
,
где  - значение несущей частоты излучаемого сигнала;
- значение несущей частоты излучаемого сигнала;
 - доплеровские сдвиги частоты несущей в моменты времени ti;
- доплеровские сдвиги частоты несущей в моменты времени ti;
Vri - значения радиальной скорости объекта в те же моменты времени;
V - значения вектора скорости;
qi - значения курсового угла объекта;
λ - длина волны сигнала радиоизлучающего объекта;
c - скорость света.
Данные с выходов ИМПС 3 и УМУ 4 подаются соответственно на первый, второй, третий и четвертый входы УВУС 5. На пятый вход УВУС 5 с выхода УФОВ 9 поступают кодированные значения текущего времени код tтек и отсчеты времени tк, с использованием которых в УВУС 5 интерполируют усредненные зависимости  ,
,  и получают непрерывные функции βT, εT, которые подают на первый и второй входы УФОУК 8. Аналогично в УВН 6 интерполируют усредненную зависимость
и получают непрерывные функции βT, εT, которые подают на первый и второй входы УФОУК 8. Аналогично в УВН 6 интерполируют усредненную зависимость  и получают непрерывную функцию
и получают непрерывную функцию  , которую подают на вход УФОН 7. Здесь с использованием отсчетов времени tк, поступающих на управляющий вход с восьмого выхода УВУС 5, формируют последовательность
, которую подают на вход УФОН 7. Здесь с использованием отсчетов времени tк, поступающих на управляющий вход с восьмого выхода УВУС 5, формируют последовательность  , которую с его выхода подают на первый вход УРД 10. Также в УФОУК 8, с использованием отсчетов времени tк, поступающих на управляющий вход с восьмого выхода УВУС 5, формируют последовательности βT(t), εT(t), которые с третьего и четвертого выходов УФОУК 8 подаются на одиннадцатый и двенадцатый входы УВУС 5, а с пятого и шестого выходов - на второй и третий входы УРД 10.
, которую с его выхода подают на первый вход УРД 10. Также в УФОУК 8, с использованием отсчетов времени tк, поступающих на управляющий вход с восьмого выхода УВУС 5, формируют последовательности βT(t), εT(t), которые с третьего и четвертого выходов УФОУК 8 подаются на одиннадцатый и двенадцатый входы УВУС 5, а с пятого и шестого выходов - на второй и третий входы УРД 10.
В УРД 10 с использованием данных о коде tтек, поступающих на четвертый вход с тринадцатого выхода УВУС 5, последовательности  , βT(t), εT(t) привязывают к соответствующим значениям единого времени t0, t1, t2, …tk. Далее с выхода УРД 10 они по запросу, поступающему на управляющий вход со второго выхода ИПЧ-УК-В 11, подаются на первый вход ИПЧ-УК-В 11.
, βT(t), εT(t) привязывают к соответствующим значениям единого времени t0, t1, t2, …tk. Далее с выхода УРД 10 они по запросу, поступающему на управляющий вход со второго выхода ИПЧ-УК-В 11, подаются на первый вход ИПЧ-УК-В 11.
С использованием данных, поступающих на третий вход ИПЧ-УК-В 11 с четырнадцатого выхода УВУС 5, в ИПЧ-УК-В 11 формируются значения Δβ, Δε и интервалов времени прохождения объектом азимутальных секторов Δβk,n=|βk-βn| и угломестных секторов Δεk,n=|εk-εn|, равных Δtk,n=tk-tn, где  - число приращений азимута или угла места, используемых при разностных вычислениях. В блоке ИПЧ-УК-В 11 определяют также значения приращений доплеровских сдвигов частоты принимаемых сигналов
- число приращений азимута или угла места, используемых при разностных вычислениях. В блоке ИПЧ-УК-В 11 определяют также значения приращений доплеровских сдвигов частоты принимаемых сигналов  на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk+n, n), причем его скорость составляет V, а высота равна H (горизонтальная скорость объекта VГ=V). Задавая значения k=0, 2, 4, а n=0, 2, определяют приращения доплеровских сдвигов частоты на интервалах Δt2,0, Δt4,2, Δt4,0.
на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения РИО (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk+n, n), причем его скорость составляет V, а высота равна H (горизонтальная скорость объекта VГ=V). Задавая значения k=0, 2, 4, а n=0, 2, определяют приращения доплеровских сдвигов частоты на интервалах Δt2,0, Δt4,2, Δt4,0.
Эти приращения из ИПЧ-УК-В 11 направляют на вход ВКУ-С-ПП 12, где определяют текущее значение курсового угла qk=βk+α, а также, используя уравнение для приращения доплеровского сдвига частоты на интервале Δt4,0, модуль горизонтальной скорости  , а затем - расстояние, пройденное РИО за интервал времени Δt4,0, как
, а затем - расстояние, пройденное РИО за интервал времени Δt4,0, как  .
.
С выхода ВКУ-С-ПП 12 данные qk, V и S подаются на блок ВЛП 13, где определяют радиус  окружности, проходящей через начало координат, хордой которой является расстояние S4,0, и находят центр O' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат O под углом βЦ=β0+q4-90°, а также линии положения. Величины O', R, qk и S с выхода ВЛП 13 передаются на пятнадцатый вход УВУС 5.
окружности, проходящей через начало координат, хордой которой является расстояние S4,0, и находят центр O' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат O под углом βЦ=β0+q4-90°, а также линии положения. Величины O', R, qk и S с выхода ВЛП 13 передаются на пятнадцатый вход УВУС 5.
В УВУС 5 вычисляют местоположение РИО как координаты точек пересечения окружности с центром O' и лучей, проведенных из начала координат под углами β0 и β4, и определяют дальности d0 и d4 из соотношения  как
как  . Затем вычисляют интерполированные dk=1,2,3 и экстраполированные dk≥4 значения дальностей на интервале сохранения гипотезы о равномерном и прямолинейном движении РИО на постоянной высоте по формулам
. Затем вычисляют интерполированные dk=1,2,3 и экстраполированные dk≥4 значения дальностей на интервале сохранения гипотезы о равномерном и прямолинейном движении РИО на постоянной высоте по формулам
 при k=1, 2, 3 и n=4,
при k=1, 2, 3 и n=4,
 при k≥4 и n=4,
при k≥4 и n=4,
после чего определяют наклонные дальности и высоты как
 и
и  ,
,
где  и
и  - значения косинуса и тангенса угла места в моменты tk.
- значения косинуса и тангенса угла места в моменты tk.
Далее в УВУС 5 осуществляют построение траектории движения РИО в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение, при этом критерием сохранения гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта является выполнение неравенств
|α-αi|<Δαi, |V-Vi|<ΔVi, |H-Hi|<ΔHi,
где Δα, ΔV, ΔH - пороговые значения величин α, V, H.
Затем определяют значение угла γ пикирования (кабрирования) как  , при расчете величин α, V и D в вышеприведенных формулах используют значение VГ=Vcosγ.
, при расчете величин α, V и D в вышеприведенных формулах используют значение VГ=Vcosγ.
В момент, когда перестают выполняться неравенства |α-αi|<Δαi и |V-Vi|<ΔVi, фиксируют начало маневра объекта, после чего задают новые начальные значения азимута для следующего участка кусочно-линейной аппроксимации траектории и повторяют расчеты ее параметров α, V, D, H, необходимые для построения траектории движения РИО в пространстве.
Для оценки точностных характеристик предложенного способа получена зависимость ошибки измерения горизонтальной дальности до РИО, являющейся финишным параметром, от ошибок измерения первичных параметров, предполагая, что они подчиняются нормальному закону распределения и являются некоррелированными.
Как показано в материалах заявки, горизонтальная дальность до РИО определяется соотношением

где
 ;
;
 .
.
После подстановки значения tgα в соотношение (1) и ряда преобразований получаем

где
 ;
;
 .
.
Ошибку измерения горизонтальной дальности до РИО получим на основании теоремы о линеаризации функции нескольких случайных аргументов в виде

где σλ,  , σΔt,
, σΔt,  - среднеквадратические ошибки (СКО) измерений соответственно длины волны сигнала передающего устройства РИО, приращения доплеровского сдвига несущей частоты принимаемого сигнала, интервала времени прохождения объектом азимутального сектора kΔβ и азимута РИО.
- среднеквадратические ошибки (СКО) измерений соответственно длины волны сигнала передающего устройства РИО, приращения доплеровского сдвига несущей частоты принимаемого сигнала, интервала времени прохождения объектом азимутального сектора kΔβ и азимута РИО.
Методы цифровой обработки сигналов позволяют производить измерение их частотных и временных параметров с относительной погрешностью не хуже 10-5…10-7, в то время как погрешности измерения УК даже при использовании антенных систем с большой апертурой находятся в пределах 10-3…10-4. Поэтому основной вклад в ошибку измерения дальности вносят погрешности измерения УК объекта, а СКО измерения дальности

Производя дифференцирование выражения (2), определяем, что

а относительная среднеквадратическая ошибка измерения дальности

где
 ;
;  ;
;


Вычисления, проведенные по формулам (4)-(8), показали, что при изменении величины β0 в пределах 0-90°, а Δβ в пределах 1°-2,5°, среднеквадратическая ошибка определения горизонтальной дальности практически не зависит от величины β0 и равна
 ,
,
где σβ - среднеквадратическая ошибка измерения азимута в угловых минутах.
Так, при точности измерения азимута σβ=2 угловым минутам величина  .
.
Для оценки точностей измерений параметров движения РИО предложенным способом в зависимости от точностей измерения совокупности первичных параметров (УК, времени, доплеровских приращений несущих частот, излучаемых объектами сигналов) в Ростовском-на-Дону НИИ радиосвязи было проведено математическое моделирование предложенных способа и пассивной однопозиционной угломерно-разностно-доплеровской РЛС. При этом предполагалось, что РИО движется равномерно и прямолинейно с заданной скоростью в пределах прямой видимости по поверхности моря, суши или в воздушной среде на малой высоте, а энергии излучаемого им сигнала достаточно для обнаружения объекта, измерения его УК и параметров излучаемого сигнала с малыми ошибками.
Сначала производился расчет в функциональной зависимости от времени точных (модельных) значений координат РИО в прямоугольной системе: горизонтальной дальности, текущих значений азимута βтек и несущей частоты  излучаемого сигнала, а также ее доплеровских приращений.
излучаемого сигнала, а также ее доплеровских приращений.
Затем рассчитывались зависимости βтек(t) и  с учетом ошибок их измерений, осуществлялся расчет параметров движения объекта по формулам предложенного способа и определялись среднеквадратические значения ошибок измерений путевого и курсового углов движения РИО, горизонтальной скорости и дальности до объекта путем сравнения их модельных и рассчитанных значений.
с учетом ошибок их измерений, осуществлялся расчет параметров движения объекта по формулам предложенного способа и определялись среднеквадратические значения ошибок измерений путевого и курсового углов движения РИО, горизонтальной скорости и дальности до объекта путем сравнения их модельных и рассчитанных значений.
В результате моделирования установлено, что при ошибках измерения азимута σβ=2 угловым минутам, частоты  и времени σt=10-6 с, относительные величины ошибок измерений курсового угла q движения РИО, скорости V его движения и горизонтальной дальности d соответственно равны
и времени σt=10-6 с, относительные величины ошибок измерений курсового угла q движения РИО, скорости V его движения и горизонтальной дальности d соответственно равны

Предложенный способ локации и однопозиционная РЛС для его реализации надежно функционируют в условиях приема флюктуирующих сигналов при достаточном отношении сигнал/шум, так как флюктуации влияют лишь на характеристики обнаружения и точность измерения неэнергетических параметров.
Реализация способа и устройства на его основе не встречает затруднений при современном уровне развития радиотехники и систем цифровой обработки сигналов. Возможность реализации предложенного способа обеспечивает ему критерий «промышленная применимость». При этом существует возможность измерения параметров движения РИО и в случае, если траектория движения находится в плоскости наблюдения, т.е. азимут объекта с течением времени не изменяется.
Таким образом, использование предложенного способа обеспечивает по сравнению с прототипом следующий технико-экономический эффект:
- повышена точность измерения наклонной дальности в 3-5 раз;
- достигнута возможность измерения скорости движения объекта с погрешностью (1-3)% и направления его движения (курсового угла) с погрешностью (3-5)%, что позволяет производить селекцию объектов по скорости и построение траекторий их движения;
- обеспечена работоспособность способа и устройства в условиях приема сложных модулированных флюктуирующих сигналов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| Способ определения параметров движения и траекторий воздушных объектов при полуактивной бистатической радиолокации | 2018 |
|
RU2687240C1 |
| Способ обзорной активно-пассивной латерационной радиолокации воздушно-космических объектов | 2019 |
|
RU2713498C1 |
| Способ обзорной трехкоординатной двухпозиционной латерационной радиолокации авиационно-космических объектов | 2019 |
|
RU2717970C1 |
| Способ обзорной однопозиционной трилатерационной некогерентной радиолокации воздушных целей | 2020 |
|
RU2735744C1 |
| Способ активной обзорной моноимпульсной радиолокации с инверсным синтезированием апертуры антенны | 2018 |
|
RU2682661C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ И ПАРАМЕТРОВ ДВИЖЕНИЯ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЙ ПО ИЗМЕРЕНИЯМ ИХ НЕСУЩЕЙ ЧАСТОТЫ | 2021 |
|
RU2776078C1 |
| СПОСОБ ОЦЕНИВАНИЯ ЛИНЕЙНОЙ СКОРОСТИ МОБИЛЬНОГО ОБЪЕКТА ОДНОПОЗИЦИОННЫМ СРЕДСТВОМ ПАССИВНОЙ РАДИОЛОКАЦИИ ВНЕ ЗОНЫ ПРЯМОЙ РАДИОВИДИМОСТИ | 2023 |
|
RU2805152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
Изобретение относится к области радиотехники и может использоваться в системах пассивной радиолокации, радиопеленгации и радиотехнического наблюдения для однопозиционного определения направления и скорости движения в пространстве радиоизлучающих объектов (РИО), селекции их по скорости, а также определения местоположения и траекторий движения. Достигаемый технический результат изобретения - возможность измерения направления движения РИО (курсового угла), величины модуля линейной скорости, наклонной дальности и траектории движении РИО. Указанный результат достигается за счет того, что восстанавливают, зная вид модуляции, несущую частоту принятого сигнала, формируют в соответствующие моменты времени и запоминают значения ее отсчетов, представляют результаты в виде соответствующей зависимости от времени, фильтруют полученную зависимость для уменьшения ошибок измерений, получая усредненную зависимость, выбирают из зависимости и фиксируют в заданные моменты времени требуемые для вычислений значения несущей частоты сигнала, интерполируют полученные усредненные угловые зависимости азимута и угла места, вычисляют интервалы времени прохождения объектом соответствующих азимутальных секторов, вычисляют приращения доплеровских сдвигов частоты принимаемых сигналов, вычисляют интерполированные и экстраполированные значения дальностей на интервале наблюдения, определяют критерий сохранения гипотезы о равномерном и прямолинейном движении РИО, определяют наклонные дальности и высоты по соответствующим формулам, на основании соответствующих вычислений строят траекторию движения РИО в пространстве на интервале наблюдения, проверяя справедливость гипотезы о равномерном и прямолинейном движении РИО, при этом устройством, реализующим способ, является угломерно-разностно-доплеровская радиолокационная система, выполненная определенным образом. 2 н. и 1 з.п. ф-лы, 4 ил.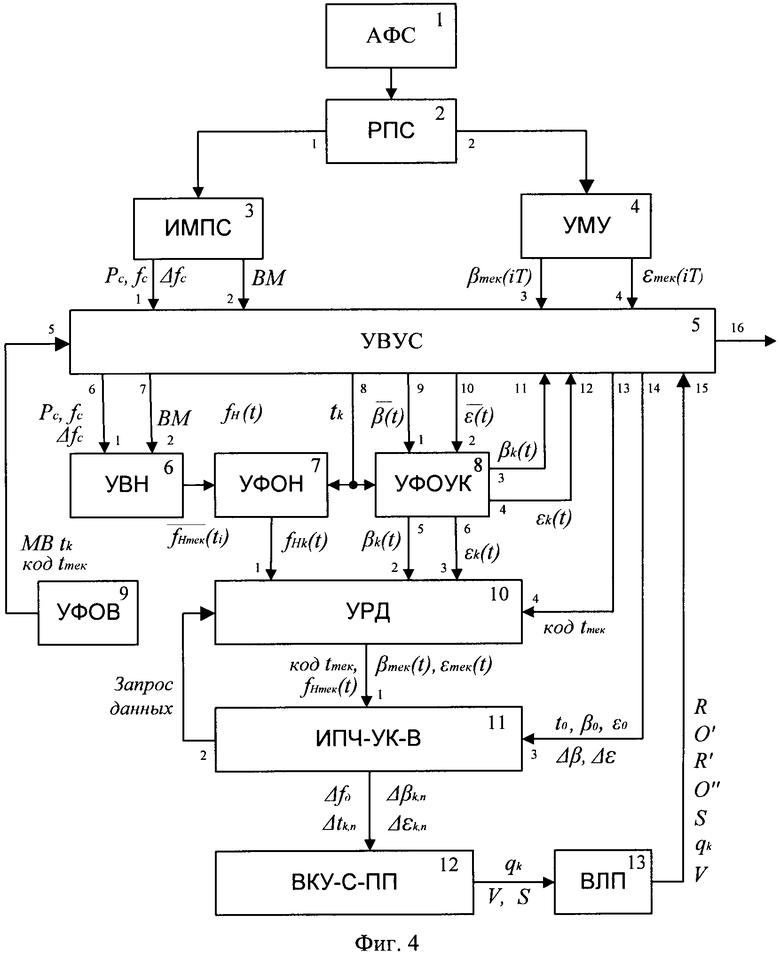
1. Способ пассивной однопозиционной угломерно-разностно-доплеровской локации перемещающегося в пространстве радиоизлучающего объекта, при котором принимают радиосигналы, констатируют обнаружение сигнала радиоизлучающего объекта и определяют его параметры - ширину спектра, среднюю частоту спектра сигнала и вид модуляции, осуществляют автосопровождение объекта по угловым координатам, измеряют в моменты времени ti=iT, где i=0, 1, 2, 3, … - номера измерений, Т - интервал времени между измерениями, и запоминают значения отсчетов угловых координат (азимута β и угла места ε), а также текущего времени, соответствующего этим отсчетам, представляют результаты измерений в виде зависимостей βтек(iT) и εтек(iT), фильтруют полученные зависимости для уменьшения ошибок измерений, получая усредненные зависимости  ,
,  , и используют эти зависимости в качестве первичных параметров при совместной обработке измерений, отличающийся тем, что восстанавливают, зная вид модуляции, несущую частоту
, и используют эти зависимости в качестве первичных параметров при совместной обработке измерений, отличающийся тем, что восстанавливают, зная вид модуляции, несущую частоту  принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов, представляют результаты в виде зависимости
принятого сигнала, формируют в моменты времени ti и запоминают значения ее отсчетов, представляют результаты в виде зависимости  , фильтруют полученную зависимость для уменьшения ошибок измерений, получая усредненную зависимость
, фильтруют полученную зависимость для уменьшения ошибок измерений, получая усредненную зависимость  , выбирают из зависимости и фиксируют в заданные моменты времени ti значения несущей частоты сигнала, равные
, выбирают из зависимости и фиксируют в заданные моменты времени ti значения несущей частоты сигнала, равные

где  - значение несущей частоты излучаемого сигнала;
- значение несущей частоты излучаемого сигнала;
 - доплеровские сдвиги частоты несущей в моменты времени ti;
- доплеровские сдвиги частоты несущей в моменты времени ti;
Vri - значения радиальной скорости объекта в те же моменты времени;
V - значения вектора скорости;
qi - значения курсового угла объекта;
λ - длина волны сигнала радиоизлучающего объекта;
с - скорость света,
интерполируют усредненные угловые зависимости и, получая непрерывные функции β(t) и ε(t), извлекают из зависимости β(t), начиная с момента времени t0 и начального значения азимута β0, несколько значений азимута βk=β0+kΔβ, где  - номера выбранных значений азимута, Δβ - постоянная величина, и запоминают их совместно с соответствующими значениями единого времени t0, t1, t2, …, tk, фиксируют, начиная со значения β0, значения азимута βn=β0+nΔβ, где
- номера выбранных значений азимута, Δβ - постоянная величина, и запоминают их совместно с соответствующими значениями единого времени t0, t1, t2, …, tk, фиксируют, начиная со значения β0, значения азимута βn=β0+nΔβ, где  - число приращений азимута, используемых при разностных вычислениях, вычисляют интервалы времени прохождения объектом азимутальных секторов
- число приращений азимута, используемых при разностных вычислениях, вычисляют интервалы времени прохождения объектом азимутальных секторов  , равные Δk,n=tk-tn, интерполируют усредненную частотную зависимость , получая непрерывную функцию
, равные Δk,n=tk-tn, интерполируют усредненную частотную зависимость , получая непрерывную функцию  , вычисляют приращения доплеровских сдвигов частоты принимаемых сигналов
, вычисляют приращения доплеровских сдвигов частоты принимаемых сигналов  на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения радиоизлучающего объекта со скоростью V на постоянной высоте Н, когда горизонтальная скорость объекта Vг=V (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk,n), а его положение в сферической системе координат определяется текущими значениями:
на интервалах Δtk,n, достаточно малых для справедливости предположения о равномерности и прямолинейности движения радиоизлучающего объекта со скоростью V на постоянной высоте Н, когда горизонтальная скорость объекта Vг=V (при движении объекта по криволинейной траектории осуществляется ее кусочно-линейная аппроксимация на интервалах Δtm>Δtk,n), а его положение в сферической системе координат определяется текущими значениями:
- наклонной дальности Dтeк, проекцией которой на плоскость горизонта является горизонтальная дальность dтeк;
- азимута βтек, отсчитываемого против часовой стрелки от основного направления, совпадающего с осью Ох, до вектора горизонтальной дальности dтeк;
- угла места εтек между наклонной и горизонтальной дальностями, связанными соотношением Dтек=dтeкcosεтек;
- путевого угла Q, отсчитываемого против часовой стрелки от основного направления до горизонтальной проекции вектора скорости V при постоянном значении высоты Н;
- курсового угла qтeк, отсчитываемого против часовой стрелки от горизонтальной проекции вектора скорости до вектора горизонтальной дальности, причем qтeк=βтек+α, Q+qтeк=βтек+180°, Q=180°-α, где α - угол между вектором скорости Vг и осью 0х; определяют горизонтальные составляющие приращений доплеровских сдвигов частоты как

находят, задавая значения k=2 и 4, n=0 и 2, приращения доплеровских сдвигов частоты на интервалах Δt2,0, Δt4,2, Δt4,0 по формулам



вычисляют величину отношения

находят, решая полученное уравнение, значение tgα и вычисляют величину угла
определяют текущее значение курсового угла qk=βk+α и, используя уравнение для приращения доплеровского сдвига частоты на интервале Δt4,0, модуль горизонтальной скорости  , а затем - расстояние, пройденное радиоизлучающим объектом за интервал времени Δt4,0, в виде
, а затем - расстояние, пройденное радиоизлучающим объектом за интервал времени Δt4,0, в виде

определяют радиус  окружности, проходящей через начало координат, хордой которой является расстояние S4,0, находят центр О' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90°, рассчитывают дальности d0 и d4 из соотношения
окружности, проходящей через начало координат, хордой которой является расстояние S4,0, находят центр О' этой окружности, фиксируя точку на конце луча длиной R, проведенного из начала координат 0 под углом βЦ=β0+q4-90°, рассчитывают дальности d0 и d4 из соотношения  в виде
в виде
определяя координаты радиоизлучающего объекта в моменты времени t0 и t4 как точки пересечения окружности с центром О' и лучей длиной d0 и d4, проведенных из начала координат под углами β0 и β4, вычисляют интерполированные dk=1, 2, 3 и экстраполированные dk≥4 значения дальностей на интервале сохранения гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта на постоянной высоте по формулам
 при k=1, 2, 3 и n=4,
при k=1, 2, 3 и n=4,
 при k≥4 и n=4,
при k≥4 и n=4,
определяют наклонные дальности и высоты как
 и
и 
где  и
и  - значения косинуса и тангенса угла места в моменты времени tk, осуществляют построение траектории движения радиоизлучающего объекта в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение, при этом критерием сохранения гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта является выполнение неравенств
- значения косинуса и тангенса угла места в моменты времени tk, осуществляют построение траектории движения радиоизлучающего объекта в пространстве на начальном интервале кусочно-линейной аппроксимации, а в случае кратковременного пропадания сигнала - ее прогнозируемое значение, при этом критерием сохранения гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта является выполнение неравенств
|α-αi|<Δαi, |V-Vi|<ΔVi, |Н-Нi|<ΔНi,
где Δα, ΔV, ΔН - пороговые значения величин α, V, Н, определяющие размеры участка кусочно-линейной аппроксимации траектории, вычисляют, в случае изменения высоты радиоизлучающего объекта, при |Нk-Нn|≥ΔН значение угла γ пикирования (кабрирования) как  , а расчеты величин α, V, D производят, используя в вышеприведенных формулах значение Vг=Vcosγ, фиксируют в момент, когда перестают выполняться неравенства |α-αi|<Δαi, и |V-Vi|<ΔVi, начало маневра объекта, после чего задают новые начальные значения азимута для следующего участка кусочно-линейной аппроксимации траектории и повторяют расчеты ее параметров α, V, D, Н для построения траектории движения радиоизлучающего объекта в пространстве на интервале наблюдения.
, а расчеты величин α, V, D производят, используя в вышеприведенных формулах значение Vг=Vcosγ, фиксируют в момент, когда перестают выполняться неравенства |α-αi|<Δαi, и |V-Vi|<ΔVi, начало маневра объекта, после чего задают новые начальные значения азимута для следующего участка кусочно-линейной аппроксимации траектории и повторяют расчеты ее параметров α, V, D, Н для построения траектории движения радиоизлучающего объекта в пространстве на интервале наблюдения.
2. Способ пассивной однопозиционной угломерно-разностно-доплеровской локации по п. 1, отличающийся тем, что в случае, если траектория движения радиоизлучающего объекта находится в плоскости наблюдения (вертикальной), т.е. азимут объекта с течением времени не изменяется (βiT=const), после получения непрерывной функции ε(t), извлекают из нее, начиная с момента времени t0, несколько значений угла места εk=ε0+kΔε, где  - номера выбранных значений угла места, отстоящих от начального значения ε0 на величины kΔε, запоминают их совместно с соответствующими значениями единого времени в моменты tk, вычисляют интервал времени прохождения объектом угломестных секторов Δεk,n=4Δε как Δt4,0=t4-t0, для n=0 и 4, фиксируют в моменты времени t0, t4 текущие значения несущей частоты сигнала радиоизлучающего объекта, равные
- номера выбранных значений угла места, отстоящих от начального значения ε0 на величины kΔε, запоминают их совместно с соответствующими значениями единого времени в моменты tk, вычисляют интервал времени прохождения объектом угломестных секторов Δεk,n=4Δε как Δt4,0=t4-t0, для n=0 и 4, фиксируют в моменты времени t0, t4 текущие значения несущей частоты сигнала радиоизлучающего объекта, равные  , где
, где  , вычисляют приращение доплеровского сдвига несущей на интервале Δt4,0 как
, вычисляют приращение доплеровского сдвига несущей на интервале Δt4,0 как  , определяют величину модуля вектора скорости радиоизлучающего объекта на интервале времени Δt4,0 как
, определяют величину модуля вектора скорости радиоизлучающего объекта на интервале времени Δt4,0 как  , а затем расстояние, пройденное радиоизлучающим объектом за интервал Δt4,0, как ΔS=VΔt4,0, а также радиус
, а затем расстояние, пройденное радиоизлучающим объектом за интервал Δt4,0, как ΔS=VΔt4,0, а также радиус  описывающей окружности, проходящей через начало координат, у которой хордой является расстояние ΔS, определяют центр Оʺ этой окружности, фиксируя точку на конце луча длиной R', проведенного из начала координат 0 под углом εЦ=2ε0-90°+4Δε, рассчитывают дальности до объекта из соотношения
описывающей окружности, проходящей через начало координат, у которой хордой является расстояние ΔS, определяют центр Оʺ этой окружности, фиксируя точку на конце луча длиной R', проведенного из начала координат 0 под углом εЦ=2ε0-90°+4Δε, рассчитывают дальности до объекта из соотношения  в виде
в виде 
 , а также высоты Н0(4)=D0(4)sinε0(4), определяя координаты радиоизлучающего объекта как точки пересечения окружности с центром Оʺ и лучей длиной D0 и D4, проведенных из начала координат под углами ε0 и ε4, после чего осуществляют построение траектории движения радиоизлучающего объекта в пространстве, задавая значения угла места из ряда εтeк(ti) и повторяя расчеты значений Δti, Vi, Di, Hi по вышеприведенным формулам, проверяя при этом справедливость гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта.
, а также высоты Н0(4)=D0(4)sinε0(4), определяя координаты радиоизлучающего объекта как точки пересечения окружности с центром Оʺ и лучей длиной D0 и D4, проведенных из начала координат под углами ε0 и ε4, после чего осуществляют построение траектории движения радиоизлучающего объекта в пространстве, задавая значения угла места из ряда εтeк(ti) и повторяя расчеты значений Δti, Vi, Di, Hi по вышеприведенным формулам, проверяя при этом справедливость гипотезы о равномерном и прямолинейном движении радиоизлучающего объекта.
3. Пассивная угломерно-разностно-доплеровская радиолокационная система, содержащая последовательно включенные антенно-фидерную систему и радиоприемную систему, соединенную своим первым выходом со входом измерителя мощности и параметров сигналов, а вторым выходом - со входом угломерного устройства, выходы которых соединены с первым, вторым, третьим и четвертым входами устройства вычисления, управления и синхронизации, отличающаяся тем, что в нее дополнительно введены устройство формирования отсчетов времени, устройство восстановления несущей частоты сигнала, устройство формирования отсчетов несущей, устройство формирования отсчетов угловых координат, устройство регистрации данных, измеритель приращений частоты, угловых координат и времени, вычислитель курсового угла, скорости и приращений положения и вычислитель линий положения, причем выход устройства формирования отсчетов времени подключен к пятому входу устройства вычисления, управления и синхронизации, а шестой и седьмой выходы устройства вычисления, управления и синхронизации соединены с первым и вторым входами устройства восстановления несущей, выход которого подключен к первому входу устройства регистрации данных через устройство формирования отсчетов несущей, второй вход устройства формирования отсчетов несущей подключен к восьмому выходу устройства вычисления, управления и синхронизации, соединенному также с управляющим входом устройства формирования отсчетов угловых координат, к первому и второму сигнальным входам которого подключены девятый и десятый выходы устройства вычисления, управления и синхронизации, при этом третий и четвертый выходы устройства формирования отсчетов угловых координат соединены с одиннадцатым и двенадцатым входами устройства вычисления, управления и синхронизации, а пятый и шестой выходы устройства формирования отсчетов угловых координат - со вторым и третьим входами устройства регистрации данных, выход которого соединен с первым входом измерителя приращений частоты, угловых координат и времени, выход которого подключен ко входу вычислителя курсового угла, скорости и приращений положения, соединенного своим выходом со входом вычислителя линий положения, выход которого соединен с пятнадцатым входом устройства вычисления, управления и синхронизации, причем тринадцатый выход устройства вычисления, управления и синхронизации подключен к четвертому входу устройства регистрации данных, а четырнадцатый выход устройства вычисления, управления и синхронизации - к третьему входу измерителя приращений частоты, угловых координат и времени, второй выход которого соединен со входом данных устройства регистрации данных, а шестнадцатый выход устройства вычисления, управления и синхронизации является выходом системы.
| СПОСОБ ОПРЕДЕЛЕНИЯ НАКЛОННОЙ ДАЛЬНОСТИ ДО ДВИЖУЩЕЙСЯ ЦЕЛИ ПАССИВНЫМ МОНОСТАТИЧЕСКИМ ПЕЛЕНГАТОРОМ | 2014 |
|
RU2557808C1 |
| СПОСОБ ФОРМИРОВАНИЯ МАРШРУТА НОСИТЕЛЯ ПЕЛЕНГАТОРА, ОПРЕДЕЛЯЮЩЕГО МЕСТОПОЛОЖЕНИЕ ИЗЛУЧАТЕЛЯ | 2007 |
|
RU2357266C1 |
| Автомат для нарезания резьбы в соединительных пластинах для электроаппаратуры | 1959 |
|
SU133326A1 |
| JP 2011174875 A, 08.09.2011 | |||
| WO 2011008206 A1, 20.01.2011 | |||
| WO 2015130794 A1, 03.09.2015 | |||
| EP 1902329 B1, 13.02.2013. | |||

