Настоящее изобретение относится к способу контроля шин на линии по производству шин, в частности, посредством получения изображений внутренней и наружной поверхностей шины и их последующей обработки, например, для определения возможного наличия обнаруживаемых дефектов на поверхности шины.
«Контроль» понимается как выполнение контроля качества шины.
Термин «шина», как правило, означает готовую шину, то есть шину после этапов сборки, формования в пресс-форме и вулканизации, но, возможно, также невулканизированную шину после этапа сборки и перед этапами формования в пресс-форме и/или вулканизации.
Шина, как правило, имеет конструкцию, которая является по существу тороидальной относительно оси вращения шины во время эксплуатации, и она имеет осевую среднюю плоскость, перпендикулярную к оси вращения, при этом указанная плоскость, как правило, представляет собой (по существу) геометрическую плоскость симметрии (например, если исключить возможные незначительные асимметрии, такие как в рисунке протектора и/или внутренней структуре).
Шина, как правило, содержит слой каркаса, имеющий концевые клапаны, которые противоположны друг другу и введены в контактное взаимодействие с соответствующими кольцевыми удерживающими конструктивными элементами, встроенными в круговых концевых частях шины, радиально внутренних и по существу перпендикулярных к оси вращения и называемых термином «борта». Один или более слоев брекера, имеющих тканевые или металлические армирующие корды, могут быть соединены со слоем каркаса в месте, радиально наружном по отношению к нему. Протекторный браслет наложен в радиальном направлении снаружи по отношению к слоям брекера. Соответствующие боковые вставки, выполненные из эластомерного материала, также наложены в аксиальном направлении снаружи на боковые поверхности слоя каркаса, при этом каждая боковая поверхность проходит от одного из краев круговых концов протекторного браслета до соответствующего кольцевого удерживающего конструктивного элемента в бортах.
Термин «корона» понимается как означающий одну, как правило, квазицилиндрическую часть шины, содержащую протекторный браслет, слои брекера и, по меньшей мере, соответствующие части слоя/слоев каркаса и герметизирующего слоя (в шинах без воздушной камеры или «бескамерных» шинах), которые являются радиально внутренними по отношению к ним.
«Боковина» понимается как одна из двух частей шины, которые расположены напротив друг друга и которые проходят по существу в радиальном направлении от противоположных сторон короны до бортов. Следовательно, каждая боковина содержит, по меньшей мере, одну соответствующую часть слоя/слоев каркаса и указанную боковую вставку.
«Плечевая зона» понимается как каждая соединяющая часть шины между короной и соответствующей боковиной (другими словами, две плечевые зоны находятся в двух круговых «угловых зонах» шины, которые являются наружным в радиальном и аксиальном направлениях). Каждая плечевая зона имеет протяженность по окружности и проходит по существу перпендикулярно к оси вращения.
Наружная или внутренняя поверхность шины понимается соответственно как поверхность, которая остается видимой после соединения шины с соответствующим ей, монтажным ободом, и как поверхность, которая больше не является видимой после указанного соединения.
«Внутреннее пространство шины» понимается как множество точек, посредством которых прямая линия, проходящая через рассматриваемую точку и параллельная оси шины, пересекает шину в двух секциях, расположенных с противоположных сторон по отношению к рассматриваемой точке.
Термины «нижний», «верхний», «под», «над» и аналогичные им используются для указания относительного положения элемента, включая, например, компонент шины, шину, устройство, приспособление и т.д., относительно грунта или положения одного из указанных элементов относительно другого элемента.
Выражение «по существу перпендикулярные» по отношению к геометрическим элементам (включая прямые линии, плоскости, поверхности и т.д.) используется для указания того, что данные элементы образуют угол, находящийся в диапазоне между приблизительно 75° и приблизительно 105°, предпочтительно в диапазоне от приблизительно 80° до приблизительно 100°.
Выражение «по существу параллельные» по отношению к вышеупомянутым геометрическим элементам используется для указания того, что данные элементы образуют угол, находящийся в диапазоне между приблизительно -15° и приблизительно +15°, предпочтительно в диапазоне от приблизительно -10° до +10°.
По отношению к станции контроля «продольный размер» понимается как размер в направлении, параллельном направлению перемещения шин, подлежащих контролю, и «поперечный размер» понимается как размер в направлении, перпендикулярном к направлению перемещения. «Длина» понимается как протяженность в продольном направлении, и «ширина» понимается как протяженность в поперечном направлении.
«Направленное световое излучение или направленный свет», падающее/падающий в точке поверхности, понимается как световое излучение, для которого имеется телесный угол, при этом телесный угол имеет данную точку в качестве вершины и величину, которая меньше или равна π/8 стерадиан, в пределах которой находится, по меньшей мере, 75% от всей силы света, предпочтительно, по меньшей мере, 90% и более предпочтительно вся сила света.
«Рассеянное световое излучение или рассеянный свет» понимается как ненаправленное световое излучение.
«Световое излучение или свет, падающее/падающий под скользящим углом», падающее/падающий в точке поверхности, понимается как световое излучение, при котором световой луч, соответствующий, по меньшей мере, 75% от всей силы света светового излучения, падающего в данной точке поверхности, образует с плоскостью, касательной к поверхности в указанной каждой точке, угол падения, который меньше или равен 60°.
«Цифровое изображение» или эквивалентно «изображение» обычно понимается как набор данных, как правило, содержащихся в компьютерном файле, в котором каждый кортеж из n координат (как правило, каждая пара координат) из конечной совокупности (как правило, двумерной и матричной, то есть N строк × М столбцов) кортежей из n пространственных координат (при этом каждый кортеж из n элементов соответствует «пикселю») связан с соответствующим набором числовых значений (которые могут характеризовать величины разных типов). Например, в монохромных изображениях (таких как изображения с уровнями серого или изображения в «шкале серого») данный набор значений состоит из одного значения на конечной шкале (как правило, с 256 уровнями или тонами), при этом данное значение характеризует, например, уровень светлоты (или интенсивности) соответствующего кортежа из n пространственных координат при отображении. Дополнительным примером являются цветные изображения, в которых набор значений характеризует уровень светлоты множества цветов или каналов, как правило, основных цветов (например, красного, зеленого и синего в кодировке RGB и голубого, пурпурного, желтого и черного в кодировке CMYK). Термин «изображение» необязательно означает его реальное отображение.
Все ссылки на конкретное «цифровое изображение» (например, на цифровое изображение, первоначально полученное на шине) охватывают в более общем смысле любое цифровое изображение, которое может быть получено посредством одного или более процессов цифровой обработки указанного конкретного цифрового изображения (включая, например, фильтрацию, выравнивание, сглаживание, бинаризацию, сравнение с порогом, морфологические преобразования (открытие и т.д.), вычисление производных или интегралов и т.д.).
Термин «двумерное изображение» или ʺ2D-изображениеʺ означает цифровое изображение, каждому пикселю которого соответствуют данные, характеризующие отражательную/рассеивающую способность и/или цвет поверхности, включая изображения, регистрируемые обычными камерами или цифровыми камерами (например, на ПЗС).
Термин «трехмерное изображение» или «3D-изображение» означает цифровое изображение, каждому пикселю которого соответствуют данные о высоте поверхности.
В области процессов производства и сборки шин для колес транспортных средств существует потребность в выполнении операций контроля качества реализуемых изделий с целью предотвращения попадания дефектных шин или шин, которые в любом случае не отвечают техническим требованиям, на рынок и/или с целью последовательного регулирования используемых устройств и оборудования для улучшения и оптимизации выполнения операций, выполняемых в производственном процессе.
Данные операции контроля качества включают, например, операции контроля, выполняемые операторами, которые тратят заранее установленное количество времени на визуальную и тактильную проверку; если с учетом его собственного опыта и чувственного восприятия оператор заподозрит, что шина не соответствует определенным стандартам качества, шина подвергается дополнительным проверкам посредством более детальной проверки, выполняемой человеком, и/или посредством соответствующего оборудования для выполнения более глубокой оценки возможных недостатков, связанных с конструкцией и/или качеством.
В публикации WO 2015/122295 А1 раскрыто устройство для получения трехмерных изображений внутренней поверхности шины, содержащее источник света, зеркало и камеру и выполненное с такой конфигурацией, что зеркало вращается вокруг оси вращения после его вставки в полость шины.
В области операций контроля качества шин Заявитель поставил проблему контроля внутренней и наружной поверхностей шины посредством оптического получения цифровых изображений шины и их последующей обработки, например, для обнаружения возможных дефектов на или вблизи поверхности. Дефекты, которые должны рассматриваться, могут включать, например, неровность поверхности или на поверхности шины (невулканизированную смесь, изменения формы и т.д.), неоднородность структуры, разрезы, наличие посторонних предметов на поверхности и т.д.
Заявитель отметил, что для использования процесса контроля в едином масштабе времени в установке для производства шин процесс контроля должен выполняться за меньшее время и со сниженными затратами и уменьшенными размерами.
Заявитель осознал, что в способах контроля качества шин посредством оптического получения изображений внутренней и наружной поверхностей шины предпочтительно, чтобы на одной станции имелись одновременно, по меньшей мере, два разных устройства, каждое из которых служит опорой для, по меньшей мере, одной системы получения изображений, и чтобы они работали, по меньшей мере частично, одновременно для уменьшения времени получения изображений, занимаемой производственной площади и занимаемого объема.
Заявитель также осознал, что одновременное наличие двух разных устройств, выполняющих операции одновременно на одной и той же шине, создает риск столкновения между устройствами или ограничения при их перемещении, которые могут вызвать замедление или усложнение процесса получения изображений, в частности, получения изображений обширных окружных периферийных участков поверхности шины.
Таким образом, Заявитель поставил задачу получения совокупности изображений окружных периферийных участков поверхности шины, а именно как внутренней, так и наружной поверхностей, за ограниченное количество времени и при ограниченном числе станций контроля и/или устройств получения изображений при одновременном предотвращении столкновений между устройствами, одновременно выполняющими операции на одной и той же шине, или предотвращении ситуации, когда одно устройство блокирует другое, а также уменьшения недостатков, обусловленных площадью, занимаемой станциями контроля.
После обработки большого объема данных с использованием программного обеспечения для трехмерного моделирования, испытаний на прототипах и последующих регулировок Заявитель установил, что геометрия станции контроля, размещение в ней устройств получения изображений и определенная последовательность операций, выполняемых ими, играют ключевую роль в решении проблемы, описанной выше.
Более конкретно, Заявитель обнаружил, что на станции контроля благодаря определенной схеме расположения элементов, предназначенных для обеспечения перемещения устройств получения изображений, относительно направления перемещения шин при определенной геометрии горизонтальной проекции станции и определенном режиме работы систем получения изображений можно осуществить процесс контроля шин, в котором изображения больших окружных периферийных участков внутренней и наружной поверхностей получают быстро при предпочтительном использовании доступного пространства.
Согласно одному аспекту изобретение относится к способу контроля шин на линии по производству шин.
Для каждой шины предпочтительно контролируют, по меньшей мере, одну часть наружной поверхности и, по меньшей мере, одну часть внутренней поверхности.
Предпочтительно предусмотрен ввод указанной шины на, по меньшей мере, первую станцию контроля вдоль направления перемещения.
Указанная, по меньшей мере, первая станция предпочтительно содержит первое устройство для получения изображений поверхности шины и второе устройство для получения изображений поверхности шины, при этом каждое из указанных первого устройства и второго устройства смонтировано на соответствующем элементе для обеспечения перемещения.
Каждый элемент для обеспечения перемещения предпочтительно содержит соответствующее неподвижное основание и соответствующую подвижную руку, на свободном конце которой смонтировано соответствующее устройство из указанного первого устройства и указанного второго устройства.
Указанная, по меньшей мере, первая станция предпочтительно содержит неподвижную опорную конструкцию, которая определяет границы зоны, занимаемой ею, при этом указанные основания элементов для обеспечения перемещения прикреплены к верхней части указанной опорной конструкции.
Указанная занимаемая зона предпочтительно имеет максимальную длину вдоль указанного направления перемещения и максимальную ширину вдоль направления, перпендикулярного к указанному направлению перемещения, при этом отношение размеров указанной занимаемой зоны, определяемое как отношение указанной максимальной длины к указанной максимальной ширине, составляет менее 0,85.
Указанные основания предпочтительно расположены таким образом, что их вертикальные проекции расположены с противоположных сторон по отношению к линии, параллельной направлению перемещения и пересекающей направление указанной максимальной ширины.
Предпочтительно предусмотрено выполнение, по меньшей мере, двух операций получения изображений в то время, когда шина остается на указанной, по меньшей мере, первой станции, для контроля указанной, по меньшей мере, одной части внутренней поверхности и указанной, по меньшей мере, одной части наружной поверхности.
На каждой операции получения изображений каждое из указанного первого устройства и указанного второго устройства предпочтительно получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины.
На каждой операции получения изображений указанное первое устройство и указанное второе устройство предпочтительно получают соответствующие изображения по существу одновременно.
Предпочтительно ни на одной из указанных двух операций получения изображений указанное первое устройство и указанное второе устройство не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности.
На, по меньшей мере, одной из указанных двух операций получения изображений указанное первое устройство предпочтительно получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, и указанное второе устройство получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности.
Заявитель полагает, что последовательность операций получения изображений, - при которой на каждой операции получения изображений два изображения окружных периферийных участков поверхности получают по существу одновременно посредством соответствующих двух устройств так, что два устройства не получают изображений внутренней поверхности в одно и то же время, и так, что на, по меньшей мере, одной операции получения изображений два устройства получают изображения соответственно внутренней и наружной поверхностей, в сочетании с тем, что вышеупомянутое отношение размеров занимаемой зоны составляет менее 0,85, и тем, что два основания подвижных рук расположены с противоположных сторон по отношению к линии, которая разделяет ширину пополам, - обеспечивает возможность получения изображений обширных окружных периферийных участков внутренней и наружной поверхностей за малое количество времени при очень ограниченном риске столкновения между двумя устройствами или между двумя подвижными руками, в то время как габаритные размеры станции вдоль направления перемещения сохраняются в уменьшенных пределах.
Действительно, вышеупомянутое расположение оснований подвижных рук позволяет размещать их на расстоянии друг от друга при использовании в полной мере размера горизонтальной проекции станции, который имеет бóльшую величину, то есть размера в направлении, перпендикулярном к направлению перемещения. Следовательно, две руки могут перемещаться в пространстве быстро без столкновений друг с другом и блокирования друг друга.
Кроме того, при условии что «длина» занимаемой зоны короче «ширины», станция будет иметь ограниченную занимаемую зону вдоль направления перемещения. С учетом того, что более одной станции, как правило, расположено последовательно вдоль направления перемещения, и того, что они имеют одинаковые размеры занимаемых зон, длины станций суммируются вместе. То обстоятельство, что длина каждой станции ограничена, уменьшает эффект суммирования длин, что в еще большей степени ограничивает общую длину множества станций. Действительно, по мнению Заявителя, большой общий размер по длине по отношению к размеру по ширине, который не «подвергается» суммированию, описанному выше, оказывается в значительно большей степени нерациональным.
В завершение, Заявитель удостоверился в том, что избежание одновременного получения изображений окружных периферийных участков внутренней поверхности предпочтительно вследствие того, что данная ситуация создавала бы риск столкновения между устройствами или подвижными руками или приводила бы к ситуации, вызывающей серьезные препятствия, в результате чего замедляются операции размещения устройств в заданных положениях или процесс фактического получения изображений.
В соответствии с настоящим изобретением могут быть предложены один или более из нижеприведенных предпочтительных отличительных признаков.
Предпочтительно предусмотрен ввод указанной шины на вторую станцию контроля вдоль указанного направления перемещения, при этом вторая станция содержит третье устройство для получения изображений поверхности шины и четвертое устройство для получения изображений поверхности шины, при этом каждое из указанного третьего устройства и указанного четвертого устройства смонтировано на соответствующем элементе для обеспечения перемещения.
Каждый элемент для обеспечения перемещения предпочтительно содержит соответствующее неподвижное основание и соответствующую подвижную руку, на свободном конце которой смонтировано соответствующее устройство из указанного третьего устройства и указанного четвертого устройства.
Предпочтительно предусмотрен ввод указанной шины на третью станцию контроля вдоль указанного направления перемещения, при этом третья станция содержит пятое устройство для получения изображений поверхности шины и шестое устройство для получения изображений поверхности шины, при этом каждое из указанного пятого устройства и указанного шестого устройства смонтировано на соответствующем элементе для обеспечения перемещения.
Каждый элемент для обеспечения перемещения предпочтительно содержит соответствующее неподвижное основание и соответствующую подвижную руку, на свободном конце которой смонтировано соответствующее устройство из указанного пятого устройства и указанного шестого устройства.
Вторая станция предпочтительно содержит соответствующую неподвижную опорную конструкцию, которая определяет границы соответствующей зоны, занимаемой второй станцией, при этом указанные соответствующие основания элементов для обеспечения перемещения прикреплены к верхней части указанной соответствующей опорной конструкции.
Третья станция предпочтительно содержит соответствующую неподвижную опорную конструкцию, которая определяет границы соответствующей зоны, занимаемой третьей станцией, при этом указанные соответствующие основания элементов для обеспечения перемещения прикреплены к верхней части указанной соответствующей опорной конструкции.
Указанная соответствующая занимаемая зона предпочтительно имеет соответствующую максимальную длину и соответствующую максимальную ширину, при этом соответствующее отношение размеров указанной соответствующей занимаемой зоны составляет менее 0,85, и более предпочтительно, если оно меньше или равно 0,80.
Указанные соответствующие основания предпочтительно расположены так, что их вертикальные проекции расположены с противоположных сторон по отношению к линии, параллельной направлению перемещения и пересекающей направление указанной соответствующей максимальной ширины.
Предпочтительно предусмотрено выполнение, по меньшей мере, двух соответствующих операций получения изображений в то время, когда шина остается на указанной второй станции, для контроля указанной, по меньшей мере, одной части внутренней поверхности и указанной, по меньшей мере, одной части наружной поверхности, при этом на каждой операции получения изображений каждое из указанного третьего устройства и указанного четвертого устройства получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины.
На каждой операции получения изображений указанное третье устройство и указанное четвертое устройство предпочтительно получают соответствующие изображения по существу одновременно.
Предпочтительно ни на одной из указанных двух операций получения изображений указанное третье устройство и указанное четвертое устройство не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности.
На, по меньшей мере, одной из указанных двух операций получения изображений указанное третье устройство предпочтительно получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, и указанное четвертое устройство получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности.
Предпочтительно предусмотрено выполнение, по меньшей мере, двух соответствующих операций получения изображений в то время, когда шина остается на указанной третьей станции, для контроля указанной, по меньшей мере, одной части внутренней поверхности и указанной, по меньшей мере, одной части наружной поверхности, при этом на каждой операции получения изображений каждое из указанного пятого устройства и указанного шестого устройства получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины.
На каждой операции получения изображений указанное пятое устройство и указанное шестое устройство предпочтительно получают соответствующие изображения по существу одновременно.
Предпочтительно ни на одной из указанных двух операций получения изображений указанное пятое устройство и указанное шестое устройство не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности.
На, по меньшей мере, одной из указанных двух операций получения изображений указанное пятое устройство предпочтительно получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, и указанное шестое устройство получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности.
Порядковые номера/числительные, такие как первый, второй, третий и т.д., обозначающие элементы и/или операции, необязательно отражают последовательность в пространстве и/или во времени, с которой соответствующие элементы и/или операции расположены, используются и/или выполняются в настоящем изобретении. Например, третья станция может быть расположена между первой станцией и второй станцией, и, что касается времени, соответствующие операции получения изображений могут выполняться между операциями получения изображений на первой станции и второй станции. В качестве дополнительного примера настоящее изобретение предусматривает любое число и/или любую комбинацию вышеупомянутых пронумерованных элементов и/или операций, например, комбинацию только из первой и третьей станций.
Кроме того, в некоторых вариантах осуществления настоящего изобретения выражение «первая станция» охватывает станцию контроля, имеющую технические характеристики (включая устройства получения изображений) и/или операции (включая операции получения изображений), раскрытые в данном документе со ссылкой на вторую станцию и/или третью станцию. Следовательно, например, выражение «первое устройство» может охватывать устройство, имеющее технические характеристики и/или операции, раскрытые в данном документе со ссылкой на третье и/или пятое устройства.
По мнению Заявителя, комбинация из, по меньшей мере, двух станций (предпочтительно из всех трех станций), выбранных из первой станции, второй станции и третьей станции, на каждой из которых выполняются вышеупомянутые операции получения изображений, обеспечивает возможность получения совокупности изображений, согласующейся с точки зрения типа и полученной протяженности поверхности, за ограниченный суммарный промежуток времени при ограниченной длительности цикла, определяемой как величина, обратная числу шин, проверенных за единицу времени, и при ограниченной потребности в занимаемом пространстве, в особенности по длине.
Предпочтительно, по меньшей мере, две, более предпочтительно все три станции, включая первую станцию, вторую станцию и третью станцию, расположены рядом друг с другом вдоль направления перемещения и, более предпочтительно, таким образом, что выход станции совпадает с входом последующей соседней станции. Таким образом, общая длина будет ограничена, общее время прохождения уменьшается, и/или потребность в опорных элементах и/или элементах для обеспечения перемещения между одной станцией и следующей станцией будет ограничена.
Указанное отношение размеров одной или более станций, то есть первой станции, второй станции и третьей станции, предпочтительно больше или равно 0,5 и более предпочтительно больше или равно 0,6. Таким образом, занимаемая зона оптимизируется, что обеспечивает ограничение занимаемого пространства в направлении, перпендикулярном к направлению перемещения.
Направление перемещения предпочтительно является горизонтальным.
Расстояние между двумя соответствующими основаниями вдоль соответствующего поперечного направления предпочтительно больше или равно 1,25 м, более предпочтительно больше или равно 1,4 м. Указанное расстояние измерено при использовании соответствующих осей указанных элементов для обеспечения перемещения, ближайших к соответствующим основаниям, как точки отсчета. Таким образом, пространственное непредусмотренное взаимодействие между элементами для обеспечения перемещения предпочтительно уменьшается за счет того, что при использовании две подвижные руки имеют достаточное пространство, доступное для быстрого перемещения без столкновения друг с другом и/или блокировки друг друга.
Зона, занимаемая каждой станцией, может иметь любую форму. Занимаемая зона предпочтительно имеет форму прямоугольника.
Занимаемая зона предпочтительно имеет более короткие стороны, параллельные указанному направлению перемещения. Таким образом, опорная конструкция оказывается особенно рациональной и устойчивой/прочной, и имеющиеся пространства в основном используются.
Предпочтительно, по меньшей мере, одна станция контроля (более предпочтительно все станции контроля) содержит ленточный конвейер, который обеспечивает опору для указанной шины в то время, когда указанная шина остается на указанной, по меньшей мере, одной станции контроля, и который выполнен с возможностью перемещения указанной шины, по меньшей мере, вдоль направления подачи.
Во время указанной операции получения указанного, по меньшей мере, одного соответствующего изображения каждым из указанных устройств соответствующий ленточный конвейер предпочтительно поворачивается вокруг оси, совпадающей с осью вращения шины, более предпочтительно, вертикальной оси. Таким образом, ленточный конвейер имеет функцию поворотной опоры, а также функцию содействия перемещению шины, поступающей на станцию контроля и выходящей из нее.
Указанный соответствующий ленточный конвейер предпочтительно имеет прямоугольную горизонтальную проекцию, при этом диагональ указанной горизонтальной проекции соответствующего ленточного конвейера имеет длину, которая меньше указанной максимальной длины зоны, занимаемой соответствующей станцией контроля, и больше или равна 0,9 от указанной максимальной длины зоны, занимаемой соответствующей станцией контроля.
Отношение размеров горизонтальной проекции соответствующего ленточного конвейера, определяемое как отношение длины короткой стороны к длине длинной стороны указанной горизонтальной проекции, предпочтительно больше или равно 0,7.
Указанное направление подачи предпочтительно параллельно длинной стороне ленточного конвейера.
Ленточный конвейер предпочтительно выполнен с возможностью обеспечения перемещения указанной шины также вдоль направления, которое перпендикулярно к направлению подачи. Таким образом, он выполняет функцию центрирования шины.
Предпочтительно во время указанного процесса ввода шины на соответствующую станцию контроля указанный соответствующий ленточный конвейер обеспечивает перемещение шины вдоль указанного направления подачи, параллельного указанному направлению перемещения. Таким образом, благодаря вышеупомянутой геометрии горизонтальной проекции ленточного конвейера обеспечивается возможность поворота ленточного конвейера, и одновременно ленточный конвейер может осуществлять перемещение шины, поступающей на станцию и выходящей из станции, обеспечивая опору для нее вплоть до мест, находящихся вблизи места ее входа на станции и места ее выхода из станции. Таким образом, в свою очередь, устраняется или уменьшается до минимума потребность в дополнительных опорных элементах для шины на входе на станцию и на выходе из станции.
Предпочтительно, по меньшей мере, одна станция контроля (более предпочтительно все три станции) содержит соответствующую пару валиков, расположенных соответственно на входе и выходе, по меньшей мере, одной станции контроля, при этом указанные валики имеют оси, проходящие в поперечном направлении.
Указанные валики предпочтительно снабжены приводом. Таким образом, валики могут обеспечивать опору для шины и, возможно, содействовать перемещению шины, входящей на станцию и выходящей из станции.
Для каждой пары соседних станций из указанной первой станции, указанной второй станции и указанной третьей станции валик на выходе одной из станций из данной пары станций предпочтительно совпадает с валиком на входе другой станции из станций, образующих данную пару станций. Таким образом, число элементов для обеспечения перемещения и опоры дополнительно уменьшается, как и время, необходимое для прохождения шины через станцию контроля.
Предпочтительно для, по меньшей мере, одной из указанных первой, второй и третьей станций предусмотрены, по меньшей мере, три операции получения изображений, выполняемые последовательно во времени в то время, когда шина остается на соответствующей станции, при этом на каждой операции получения изображений каждое из указанных соответствующих устройств соответствующей станции получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины, и при этом указанные соответствующие устройства соответствующей станции получают соответствующие изображения по существу одновременно.
Предпочтительно ни на одной из указанных трех операций получения изображений указанные соответствующие устройства не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности. Предпочтительно на каждой из указанных трех операций получения изображений одно из указанных соответствующих устройств соответствующей станции получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, и другое из указанных соответствующих устройств соответствующей станции получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности. Таким образом, в то время, когда шина остается на одной станции, по меньшей мере, шесть изображений окружных периферийных участков, предпочтительно три изображения внутренней поверхности и три изображения наружной поверхности, могут быть получены в быстрой последовательности.
Предпочтительно для, по меньшей мере, одной из указанных первой, второй и третьей станций предусмотрены четыре операции получения изображений, выполняемые последовательно во времени в то время, когда шина остается на соответствующей станции, при этом на каждой операции получения изображений каждое из указанных соответствующих устройств соответствующей станции получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины, и при этом указанные соответствующие устройства соответствующей станции получают соответствующие изображения по существу одновременно.
Предпочтительно ни на одной из указанных четырех операций получения изображений указанные соответствующие устройства соответствующей станции не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности.
Предпочтительно на каждой из указанных четырех операций получения изображений на второй станции указанное третье устройство получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, и указанное четвертое устройство получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности.
Таким образом, в то время, когда шина остается на одной станции, по меньшей мере, восемь изображений окружных периферийных участков могут быть получены в быстрой последовательности, предпочтительно четыре изображения внутренней поверхности и четыре изображения наружной поверхности на второй станции.
На каждой из указанных соответствующих операций получения изображений указанное первое устройство и/или указанное третье устройство предпочтительно получает (-ют), по меньшей мере, одно двумерное изображение указанного соответствующего окружного периферийного участка поверхности. Более предпочтительно, если указанное первое устройство и/или указанное третье устройство также получает (-ют) одновременно с указанным двумерным изображением, по меньшей мере, одно трехмерное изображение указанного соответствующего окружного периферийного участка поверхности. Таким образом, первое и/или третье устройство (-а) одновременно получает (-ют) изображения двух разных типов для одного и того же участка поверхности. Например, 3D-технология (в частности, 3D-технология с высоким разрешением, например, с разрешением, которое меньше или равно 10 микронам) используется для обнаружения вмятин или выступов материала на поверхности шин, как правило, углублений или пузырьков, в то время как 2D-технология используется для обнаружения дефектных состояний, которые не видны в 3D, таких как разрезы и пятна.
На указанной первой станции указанное первое устройство предпочтительно получает (более предпочтительно на указанных четырех операциях получения изображений) двумерные и трехмерные изображения соответствующих окружных периферийных участков наружной поверхности первой части боковины, наружной поверхности плечевой зоны, внутренней поверхности первой части и второй части короны указанной шины.
Предпочтительно (более предпочтительно на одной из указанных четырех операций получения изображений, предшествующей по времени по отношению к остальным операциям получения изображений из указанных четырех операций получения изображений), если указанное второе устройство получает трехмерное изображение окружного периферийного участка внутренней поверхности короны указанной шины, более предпочтительно с низким разрешением (например, с разрешением, превышающим 10 микрон). Таким образом, получают информацию о внутренней форме шины, полезную для принятия решения в отношении того, продолжать ли операции контроля посредством последующего ввода дополнительных устройств во внутреннее пространство шины.
Предпочтительно (более предпочтительно на указанных других операциях получения изображений из указанных четырех операций получения изображений), если указанное второе устройство получает, используя освещение светом, падающим под скользящим углом, двумерные изображения окружного периферийного участка наружной поверхности соответственно борта, первой части и второй части протектора указанной шины.
Таким образом, предпочтительно получают изображения, полезные для обнаружения разрезов на наружном борте и слоев каркаса, появляющихся на протекторе.
На указанной второй станции указанное третье устройство предпочтительно получает (на указанных соответствующих операциях получения изображений) двумерные и трехмерные изображения соответствующих окружных периферийных участков наружной поверхности борта, второй части боковины, первой части и второй части короны указанной шины.
На указанной второй станции указанное четвертое устройство предпочтительно получает (на указанных соответствующих операциях получения изображений) трехмерные изображения соответствующих окружных периферийных участков внутренней поверхности борта, первой части и второй части боковины и плечевой зоны указанной шины.
Каждое из вышеупомянутых трехмерных изображений предпочтительно получают посредством триангуляции на двумерном матричном изображении поверхности, освещаемой линией излучения лазера.
На указанной третьей станции указанное пятое устройство предпочтительно получает (на указанных соответствующих операциях получения изображений) двумерные изображения соответствующих окружных периферийных участков наружной поверхности борта, боковины и плечевой зоны указанной шины.
На указанной третьей станции указанное шестое устройство предпочтительно получает (на указанных соответствующих операциях получения изображений) двумерные изображения соответствующих окружных периферийных участков внутренней поверхности плечевой зоны, борта, первой части и второй части боковины указанной шины.
По мнению Заявителя, вышеупомянутые операции получения изображений обеспечивают совокупность двумерных и трехмерных изображений, достаточную для обнаружения дефектов, имеющихся в шинах, посредством последующей цифровой обработки данных.
Каждая из указанной второй станции и/или третьей станции предпочтительно имеет одну или более из технических характеристик, описанных для первой станции.
Предпочтительно предусмотрено выполнение одной или более из операций, описанных для первой станции, на каждой из указанных второй станции и/или третьей станции.
Указанные окружные периферийные участки предпочтительно представляют собой часть верхней определяемой в аксиальном направлении, первой половины указанной шины. Таким образом, устройства также посредством их вставки сверху во внутреннее пространство шины могут получить изображения всей внутренней и наружной поверхности верхней половины шины, которая после ее переворачивания на противоположную сторону должна затем быть подвергнута такой же последовательности операций получения изображений для противоположной половины.
Дополнительные признаки и преимущества станут более очевидными из подробного описания некоторых иллюстративных, но не эксклюзивных вариантов осуществления способа контроля шин согласно настоящему изобретению. Данное описание приведено ниже в данном документе со ссылкой на приложенные чертежи, которые представлены только в качестве приблизительных и, следовательно, неограничивающих примеров и на которых:
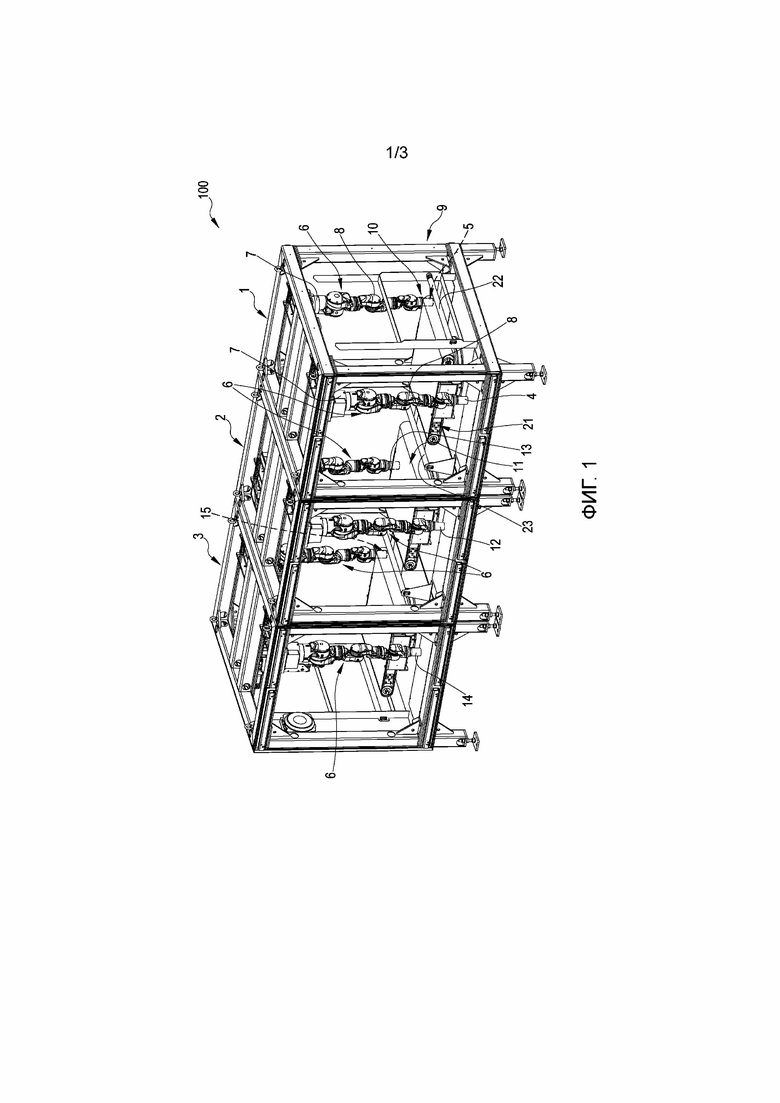
фиг.1 - частичный схематический вид в перспективе установки для контроля шин в соответствии со способом по настоящему изобретению;
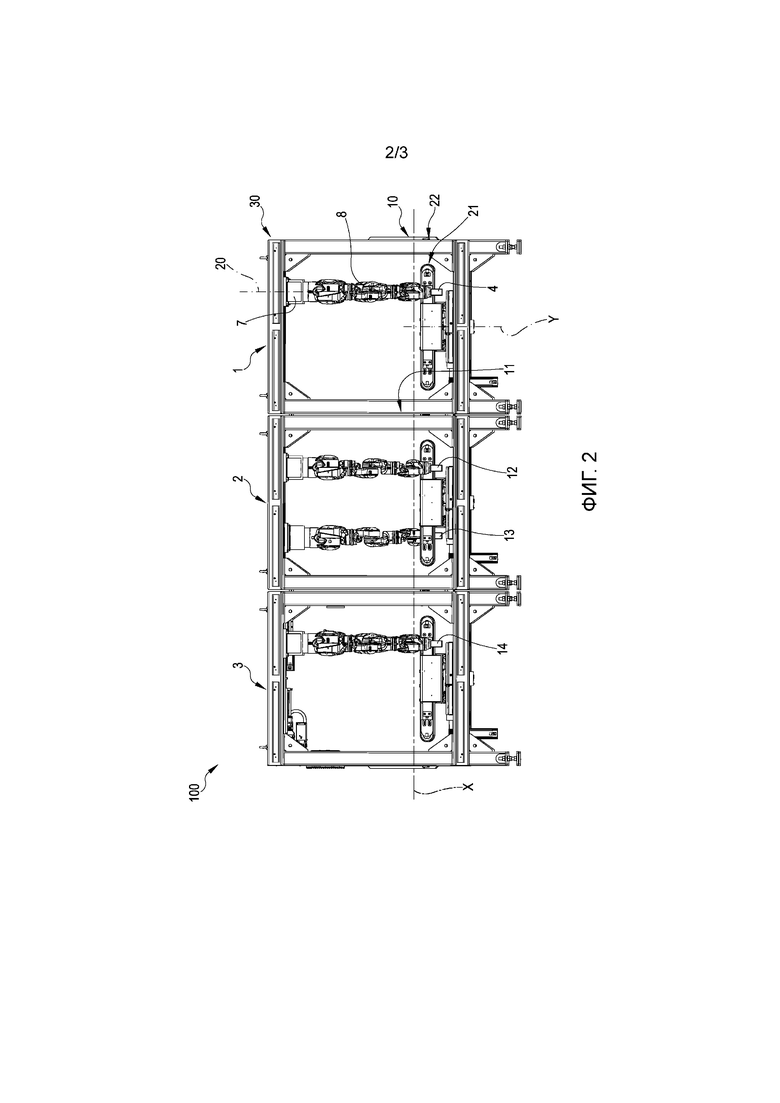
Фиг.2 - частичный схематический вид сбоку установки с фиг.1; и
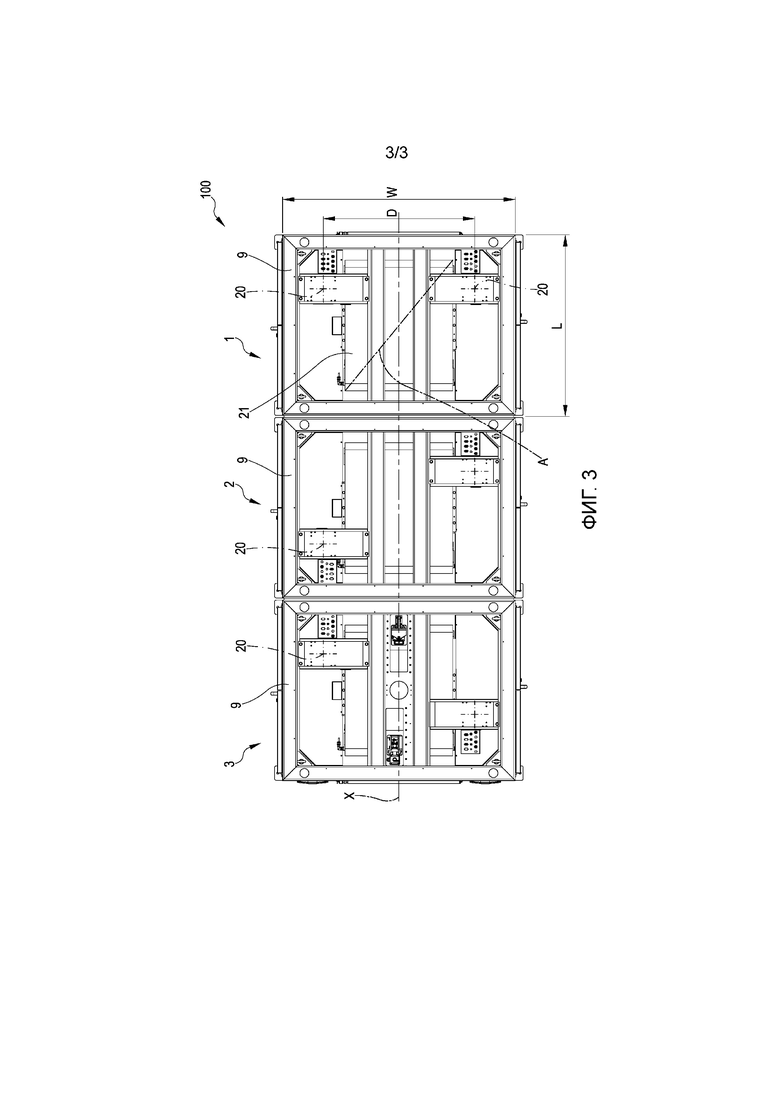
Фиг.3 - частичный схематический вид сверху установки с фиг.1.
Установка для контроля шин в соответствии со способом по настоящему изобретению обозначена ссылочной позицией 100.
В качестве примера установка 100 содержит три станции контроля: первую станцию 1, вторую станцию 2 и третью станцию 3.
Первая станция 1 предпочтительно содержит вход 10 и выход 11 для обеспечения входа и выхода контролируемой/проверяемой шины (непроиллюстрированной). Направление Х перемещения задано для шины, поступающей на первую станцию 1 и выходящей из нее.
Первая станция 1 предпочтительно содержит первое устройство 4 и второе устройство 5 для получения изображений поверхности шины. Устройства получения изображений показаны только схематически.
Первая станция 1 предпочтительно содержит для каждого устройства получения изображений соответствующий элемент 6 для обеспечения перемещения. Каждый элемент 6 для обеспечения перемещения предпочтительно представляет собой антропоморфную роботизированную руку, имеющую, по меньшей мере, шесть степеней подвижности, в качестве примера - семь степеней подвижности.
Каждый элемент 6 для обеспечения перемещения предпочтительно содержит соответствующее неподвижное основание 7 и соответствующую подвижную руку 8, на свободном конце которой смонтировано соответствующее устройство 4, 5.
Первая станция 1 предпочтительно содержит неподвижную опорную конструкцию 9, которая определяет границы зоны (проиллюстрированной на фиг.3), занимаемой первой станцией.
Основания 7 предпочтительно прикреплены к верхней части 30 опорной конструкции 9.
Занимаемая зона предпочтительно имеет максимальную длину L вдоль направления перемещения и максимальную ширину W вдоль поперечного направления, при этом отношение размеров занимаемой зоны, определенное как отношение максимальной длины к максимальной ширине, в качестве примера равно 0,75.
Неподвижные основания 7 предпочтительно расположены таким образом, что их вертикальные проекции расположены с противоположных сторон по отношению к линии (совпадающей на фиг.3 с направлением Х перемещения), параллельной направлению Х перемещения и пересекающейся с направлением максимальной ширины W.
В качестве примера расстояние D между указанными двумя неподвижными основаниями 7, определяемое вдоль поперечного направления, равно 1,25 м. Расстояние D измерено (фиг.3) при использовании оси 20 каждого элемента для обеспечения перемещения, ближайшего к соответствующему неподвижному основанию, в качестве точки отсчета, при этом данная ось 20 представляет собой, например, ось поворота.
Занимаемая зона предпочтительно имеет форму прямоугольника с более короткими сторонами, параллельными направлению перемещения.
Первая станция 1 контроля предпочтительно содержит соответствующий ленточный конвейер 21, который обеспечивает опору для шины в то время, когда шина остается на станции. Ленточный конвейер 21 предпочтительно выполнен с возможностью обеспечения перемещения шины вдоль направления подачи (совпадающего на чертежах с направлением Х перемещения), параллельного одной его стороне, и вдоль направления, перпендикулярного к вышеупомянутому направлению подачи, и он выполнен с возможностью поворота вокруг вертикальной оси Y.
Ленточный конвейер 21 предпочтительно имеет прямоугольную горизонтальную проекцию (фиг.3), при этом диагональ А горизонтальной проекции ленточного конвейера имеет длину, которая немного меньше длины L зоны, занимаемой станцией; например, она равна приблизительно 0,92 от длины L зоны, занимаемой станцией. В качестве примера отношение длины короткой стороны к длине длинной стороны горизонтальной проекции ленточного конвейера 21 равно приблизительно 0,8. Таким образом, обеспечивается достаточное основание для опирания шины.
Первая станция 1 предпочтительно содержит два валика 22, 23, снабженных приводом, расположенных соответственно на входе 35 и выходе 36 и имеющих оси, проходящие горизонтально и проходящие в поперечном направлении.
Первая станция 1, вторая станция 2 и третья станция 3 предпочтительно расположены рядом друг с другом или «близко друг к другу» последовательно вдоль направления Х перемещения таким образом, что выход 11 первой станции совпадает с входом второй станции, и выход второй станции совпадает с входом третьей станции.
Предпочтительно, как можно видеть на фигуре, один валик 23 расположен между первой станцией и второй станцией на выходе 11 первой станции 1 и на входе второй станции 2. Аналогичным образом, один валик расположен между второй станцией и третьей станцией.
Вторая станция 2 предпочтительно содержит третье устройство 12 для получения изображений поверхности шины и четвертое устройство 13 для получения изображений поверхности шины, при этом каждое из указанного третьего устройства 12 и указанного четвертого устройства 13 смонтировано на соответствующем элементе 6 для обеспечения перемещения.
Третья станция 3 предпочтительно содержит пятое устройство 14 для получения изображений поверхности шины и шестое устройство 15 для получения изображений поверхности шины, при этом каждое из указанного пятого устройства 14 и указанного шестого устройства 15 смонтировано на соответствующем элементе 6 для обеспечения перемещения.
В качестве примера в том, что касается опорной конструкции, занимаемой зоны, элементов для обеспечения перемещения, соответствующего ленточного конвейера и валиков, вторая станция 2 и третья станция 3 имеют такие же характеристики, как описанные выше для первой станции 1, как показано на фиг.1, 2 и 3.
При использовании можно реализовать способ контроля шин на линии по производству шин в соответствии с настоящим изобретением.
Предпочтительно предусмотрен ввод шины (непроиллюстрированной) через вход 10 на первую станцию 1 контроля вдоль направления Х перемещения. Для этого как валик 22, так и ленточный конвейер 21 приводятся в действие для обеспечения опоры для шины и перемещения шины, опирающейся ее боковиной.
Во время ввода шины на станцию соответствующий ленточный конвейер 21 предпочтительно не поворачивается вокруг оси Y, и он расположен так, чтобы направление подачи было параллельно направлению Х перемещения для перемещения шины вдоль данного направления.
Когда шина будет размещена так, что ее ось вращения будет совпадать с осью Y поворота ленточного конвейера, ленточный конвейер прекращает выполнять функцию перемещения, и вместо этого включается поворот ленточного конвейера вокруг оси Y.
Роботизированные руки приводятся в действие для размещения соответствующих устройств получения изображений в заданных положениях вблизи соответствующего участка поверхности шины.
При обеспечении поворота ленточного конвейера вокруг вертикальной оси Y и при удерживании роботизированных рук в неподвижном состоянии переходят к первой операции получения изображений, на которой первое устройство 4 и второе устройство 5 по существу одновременно получают, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины.
В качестве примера на первой операции получения изображений первое устройство 4 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка наружной поверхности, которая соответствует первой половинной части верхней боковины шины.
В качестве примера на первой операции получения изображений второе устройство 5 получает с низким разрешением трехмерное изображение окружного периферийного участка внутренней поверхности, которая соответствует всей верхней половинной части короны шины.
После завершения первой операции получения изображений положения роботизированных рук изменяют так, чтобы соответствующие устройства могли получить изображения других участков поверхности.
После этого при обеспечении поворота ленточного конвейера вокруг вертикальной оси Y и при удерживании роботизированных рук в неподвижном состоянии переходят ко второй операции получения изображений.
В качестве примера на второй операции получения изображений первое устройство 4 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка наружной поверхности верхней плечевой зоны шины, и второе устройство 5 одновременно с первым устройством получает двумерное изображение окружного периферийного участка наружной поверхности, соответствующей всему верхнему борту, используя освещение светом, падающим под скользящим углом.
После завершения второй операции получения изображений, аналогично тому, что описано выше, переходят к выполнению третьей операции получения изображений, на которой первое устройство 4 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка внутренней поверхности, которая соответствует первой верхней части короны, и второе устройство 5 одновременно с первым устройством получает двумерное изображение окружного периферийного участка наружной поверхности, которая соответствует первой верхней части короны, используя освещение светом, падающим под скользящим углом.
После завершения третьей операции получения изображений, аналогично тому, что описано выше, переходят к выполнению четвертой и последней операции получения изображений, на которой первое устройство 4 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка внутренней поверхности, которая соответствует второй верхней части короны, и второе устройство 5 одновременно с первым устройством получает двумерное изображение окружного периферийного участка наружной поверхности, которая соответствует второй верхней части короны, используя освещение светом, падающим под скользящим углом.
После завершения четвертой операции получения изображений поворот ленточного конвейера 21 вокруг оси Y прекращается, и ленточный конвейер 21 и валик 23 после этого приводятся в движение в режиме для перемещения шины для удаления шины из первой станции 1 и ее ввода на вторую станцию 2 через выход 11 первой станции 1, который является общим с входом второй станции 2, вдоль направления Х перемещения.
Как описано для первой станции 1, четыре дополнительные операции получения изображений, а именно пятую - восьмую операции получения изображений, выполняют на второй станции 2.
В качестве примера на пятой операции получения изображений третье устройство 12 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка наружной поверхности, которая соответствует верхнему борту шины, и четвертое устройство 13 одновременно с третьим устройством получает трехмерное изображение окружного периферийного участка внутренней поверхности, соответствующей верхнему борту.
В качестве примера на шестой операции получения изображений третье устройство 12 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка наружной поверхности, которая соответствует второй половинной части верхней боковины, и четвертое устройство 13 одновременно с третьим устройством получает трехмерное изображение окружного периферийного участка внутренней поверхности, которая соответствует первой половинной части верхней боковины.
В качестве примера на седьмой операции получения изображений третье устройство 12 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка наружной поверхности, которая соответствует первой части верхней половины короны, и четвертое устройство 13 одновременно с третьим устройством получает трехмерное изображение окружного периферийного участка внутренней поверхности, которая соответствует второй половинной части верхней боковины.
В качестве примера на восьмой операции получения изображений третье устройство 12 получает двумерное изображение и одновременно трехмерное изображение одного и того же окружного периферийного участка наружной поверхности, которая соответствует второй части верхней половины короны, и четвертое устройство 13 одновременно с третьим устройством получает трехмерное изображение окружного периферийного участка внутренней поверхности, которая соответствует верхней плечевой зоне.
После завершения восьмой операции получения изображений поворот соответствующего ленточного конвейера вокруг оси Y прекращается, и соответствующий ленточный конвейер и соответствующий валик, расположенный между второй станцией и третьей станцией, приводятся в движение в режиме перемещения для удаления шины из второй станции 2 и ее ввода на третью станцию 3 через выход второй станции 2, который является общим с входом третьей станции 3, вдоль направления Х перемещения.
Как описано для первой станции 1, четыре дополнительные операции получения изображений, а именно девятую - двенадцатую операции получения изображений, выполняют на третьей станции 3.
В качестве примера на девятой операции получения изображений пятое устройство 14 получает двумерное изображение окружного периферийного участка наружной поверхности, которая соответствует верхней боковине шины, и шестое устройство 15 одновременно с пятым устройством получает двумерное изображение окружного периферийного участка внутренней поверхности, которая соответствует верхней плечевой зоне. Во время девятой операции получения изображений верхнюю плечевую зону предпочтительно сдавливают сверху вниз вблизи зоны получения изображения поверхности для улучшения обнаружения дефектов некоторых типов (таких как разрезы или сдвиг каркаса).
В качестве примера на десятой операции получения изображений пятое устройство 14 получает двумерное изображение окружного периферийного участка наружной поверхности, соответствующей верхнему борту шины, и шестое устройство 15 одновременно с пятым устройством получает двумерное изображение окружного периферийного участка внутренней поверхности, соответствующей верхнему борту.
В качестве примера на одиннадцатой операции получения изображений функционирует только шестое устройство 15, и оно получает двумерное изображение окружного периферийного участка внутренней поверхности, которая соответствует первой части верхней боковины, при этом верхнюю боковину предпочтительно удерживают сдавленной сверху вниз вблизи зоны получения изображения поверхности во время получения изображения.
В качестве примера на двенадцатой операции получения изображений пятое устройство 14 получает двумерное изображение окружного периферийного участка наружной поверхности, которая соответствует верхней плечевой зоне шины, и шестое устройство 15 одновременно с пятым устройством получает двумерное изображение окружного периферийного участка внутренней поверхности, которая соответствует второй части верхней боковины. Во время двенадцатой операции получения изображений верхнюю боковину предпочтительно сдавливают сверху вниз вблизи зоны получения изображения поверхности.
Впоследствии шину перемещают для ее удаления из третьей станции через соответствующий выход, переворачивают вокруг средней плоскости по существу осевой симметрии и подвергают дополнительной последовательности из двенадцати операций получения изображений, описанной выше, для получения изображений всей внутренней и наружной поверхности другой половины шины.
Эта дополнительная последовательность из двенадцати операций получения изображений может быть выполнена на тех же трех станциях 1, 2 и 3, которые описаны выше, или предпочтительно на трех дополнительных станциях, которые полностью идентичны трем станциям, описанным выше, и расположены по ходу за ними.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И СТАНЦИЯ КОНТРОЛЯ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2737564C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ НАЛОЖЕНИЯ ШУМОПОНИЖАЮЩИХ ЭЛЕМЕНТОВ НА ШИНЫ ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2018 |
|
RU2768903C2 |
| УСТРОЙСТВО И СПОСОБ АНАЛИЗА ШИН | 2016 |
|
RU2726725C2 |
| СПОСОБ И ЛИНИЯ ДЛЯ КОНТРОЛЯ ШИН КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2017 |
|
RU2729453C2 |
| СПОСОБ УПРАВЛЕНИЯ НАЛОЖЕНИЕМ ШУМОПОНИЖАЮЩИХ ЭЛЕМЕНТОВ НА ШИНЫ ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ И РАБОЧАЯ СТАНЦИЯ ДЛЯ ЭТОГО | 2019 |
|
RU2752622C1 |
| СПОСОБ И ЛИНИЯ КОНТРОЛЯ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2678224C1 |
| СПОСОБ И УСТРОЙСТВО ОБНАРУЖЕНИЯ ДЕФЕКТОВ НА ПОВЕРХНОСТИ ШИН | 2016 |
|
RU2657648C1 |
| УСТРОЙСТВО И СПОСОБ АНАЛИЗА ШИН | 2016 |
|
RU2721050C2 |
| УСТРОЙСТВО И СПОСОБ КОНТРОЛЯ ШИН | 2017 |
|
RU2728848C2 |
| УСТРОЙСТВО И СПОСОБ СБОРКИ ШИН ДЛЯ КОЛЕС ТРАНСПОРТНЫХ СРЕДСТВ | 2015 |
|
RU2693161C2 |
Изобретение относится к способу контроля шин на линии по производству шин, в частности, посредством получения изображений внутренней и наружной поверхностей шины и их последующей обработки, например, для определения возможного наличия обнаруживаемых дефектов на поверхности шины. Способ контроля шин включает операции получения изображений поверхности шины на станции (1; 2; 3), содержащей первое устройство (4) и второе устройство (5), которые оба смонтированы на соответствующем элементе (6) для обеспечения перемещения, причем на каждой операции получают соответствующее изображение по существу одновременно, при этом первое устройство (4) получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, и второе устройство (5) получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности. Техническим результатом является получение совокупности изображений окружных периферийных участков поверхности шины за ограниченное количество времени, а также уменьшение площади, занимаемой станциями контроля. 15 з.п. ф-лы, 3 ил.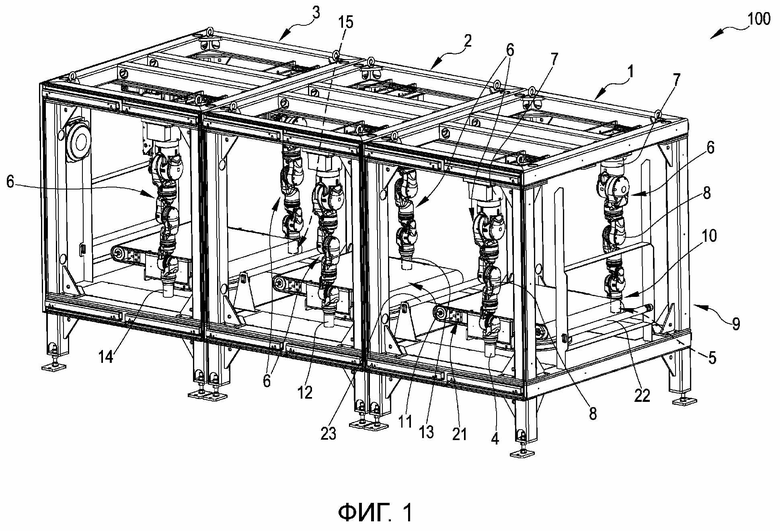
1. Способ контроля шин на линии по производству шин, при котором для каждой шины контролируют, по меньшей мере, одну часть наружной поверхности и, по меньшей мере, одну часть внутренней поверхности, при этом способ включает:
ввод шины на, по меньшей мере, первую станцию (1; 2; 3) контроля вдоль направления (Х) перемещения, причем указанная, по меньшей мере, первая станция (1; 2; 3) содержит первое устройство (4; 12; 14) для получения изображений поверхности шины и второе устройство (5; 13; 15) для получения изображений поверхности шины, при этом каждое из первого устройства (4; 12; 14) и второго устройства (5; 13; 15) смонтировано на соответствующем элементе (6) для обеспечения перемещения, причем каждый элемент (6) для обеспечения перемещения содержит соответствующее закрепленное основание (7) и соответствующую подвижную руку (8), на свободном конце которой смонтировано соответствующее устройство из первого устройства (4; 12; 14) и второго устройства (5; 13; 15), при этом указанная, по меньшей мере, первая станция содержит закрепленную опорную конструкцию (9), которая определяет границы зоны, занимаемой ею, причем основания (7) элементов (6) для обеспечения перемещения прикреплены к верхней части (30) опорной конструкции (9), при этом занимаемая зона имеет максимальную длину (L) вдоль направления (X) перемещения и максимальную ширину (W) вдоль направления, перпендикулярного направлению перемещения, причем отношение размеров занимаемой зоны, определяемое как отношение максимальной длины (L) к максимальной ширине (W), составляет менее 0,85, при этом основания (7) расположены таким образом, что их вертикальные проекции расположены с противоположных сторон по отношению к линии, параллельной направлению (Х) перемещения и пересекающей максимальную ширину (W);
выполнение, по меньшей мере, двух операций получения изображений в то время, когда шина остается на указанной, по меньшей мере, первой станции (1; 2; 3), для контроля указанной, по меньшей мере, одной части внутренней поверхности и указанной, по меньшей мере, одной части наружной поверхности,
причем на каждой операции получения изображений каждое из первого устройства (4; 12; 14) и второго устройства (5; 13; 15) получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины,
при этом на каждой операции получения изображений первое устройство (4; 12; 14) и второе устройство (5; 13; 15) получают соответствующие изображения по существу одновременно,
причем ни на одной из указанных двух операций получения изображений первое устройство (4; 12; 14) и второе устройство (5; 13; 15) не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности,
при этом на, по меньшей мере, одной из указанных двух операций получения изображений первое устройство (4; 12; 14) получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, а второе устройство (5; 13; 15) получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности.
2. Способ по п.1, при котором указанное отношение размеров больше или равно 0,5, причем занимаемая зона имеет форму прямоугольника с более короткими сторонами, параллельными направлению (Х) перемещения.
3. Способ по п. 1 или 2, при котором расстояние (D) между основаниями (7) по поперечному размеру больше или равно 1,25 м.
4. Способ по любому из предшествующих пунктов, при котором указанная, по меньшей мере, первая станция (1; 2; 3) контроля содержит ленточный конвейер (21), который обеспечивает опору для шины в то время, когда шина остается на указанной, по меньшей мере, первой станции, и он выполнен с возможностью обеспечения перемещения шины вдоль направления подачи, при этом во время ввода шины на указанную, по меньшей мере, первую станцию (1; 2; 3) ленточный конвейер (21) обеспечивает перемещение шины вдоль направления подачи, параллельного направлению (Х) перемещения.
5. Способ по п.4, при котором во время операции получения указанного, по меньшей мере, одного соответствующего изображения каждым из первого устройства (4; 12; 14) и второго устройства (5; 13; 15) ленточный конвейер (21) поворачивается вокруг оси (Y), совпадающей с осью вращения шины.
6. Способ по п.4 или 5, при котором ленточный конвейер (21) имеет прямоугольную горизонтальную проекцию, причем диагональ (А) горизонтальной проекции ленточного конвейера имеет длину, которая меньше максимальной длины (L) зоны, занимаемой указанной, по меньшей мере, первой станцией контроля, и больше или равна 0,9 от максимальной длины (L), при этом отношение размеров горизонтальной проекции ленточного конвейера (21), определяемое как отношение длины короткой стороны к длине длинной стороны горизонтальной проекции, больше или равно 0,7, причем направление подачи параллельно длинной стороне.
7. Способ по любому из предшествующих пунктов, при котором указанная, по меньшей мере, первая станция (1; 2; 3) содержит пару валиков (22, 23), расположенных соответственно на входе (10) и выходе (11), при этом валики имеют оси, проходящие в поперечном направлении.
8. Способ по любому из предшествующих пунктов, включающий выполнение, по меньшей мере, трех операций получения изображений последовательно во времени в то время, когда шина остается на указанной, по меньшей мере, первой станции (1; 2; 3), причем на каждой операции получения изображений каждое из первого устройства (4; 12; 14) и второго устройства (5; 13; 15) получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины, при этом первое устройство (4; 12; 14) и второе устройство (5; 13; 15) получают соответствующие изображения по существу одновременно, причем ни на одной из указанных трех операций получения изображений первое устройство (4; 12; 14) и второе устройство (5; 13; 15) не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности, при этом на каждой из указанных трех операций получения изображений либо первое устройство (4; 12; 14), либо второе устройство (5; 13; 15) получает соответствующее изображение соответствующего окружного периферийного участка наружной поверхности, и другое из либо первого устройства (4; 12; 14), либо второго устройства (5; 13; 15) получает соответствующее изображение соответствующего окружного периферийного участка внутренней поверхности.
9. Способ по п.8, включающий выполнение, по меньшей мере, четырех операций получения изображений последовательно во времени в то время, когда шина остается на указанной, по меньшей мере, первой станции (1; 2; 3), причем на каждой операции получения изображений каждое из первого устройства (4; 12; 14) и второго устройства (5; 13; 15) получает, по меньшей мере, одно соответствующее изображение соответствующего окружного периферийного участка поверхности шины, при этом первое устройство (4; 12; 14) и второе устройство (5; 13; 15) получают соответствующие изображения по существу одновременно, причем ни на одной из указанных четырех операций получения изображений первое устройство (4; 12; 14) и второе устройство (5; 13; 15) не получают оба соответствующее изображение окружного периферийного участка внутренней поверхности.
10. Способ по любому из предшествующих пунктов, при котором на каждой из соответствующих операций получения изображений первое устройство (4; 12) получает, по меньшей мере, одно двумерное изображение соответствующего окружного периферийного участка поверхности, а также одновременно с двумерным изображением, по меньшей мере, одно трехмерное изображение соответствующего окружного периферийного участка поверхности.
11. Способ по любому из предшествующих пунктов, при котором первая станция (1), вторая станция (2) и третья станция (3) расположены рядом друг с другом вдоль направления (Х) перемещения таким образом, что выход первой станции (1) совпадает с входом второй станции (2), и выход второй станции (2) совпадает с входом третьей станции (3).
12. Способ по п.11, при котором каждая из второй станции (2) и/или третьей станции (3) имеет технические характеристики, заявленные для первой станции (1), при этом на каждой из второй станции (2) и/или третьей станции (3) предусмотрено выполнение операций, заявленных для первой станции (1).
13. Способ по п.11 или 12, при котором на первой станции (1) первое устройство (4) получает двумерные и трехмерные изображения соответствующих окружных периферийных участков наружной поверхности первой части боковины, наружной поверхности плечевой зоны, внутренней поверхности первой части и второй части короны указанной шины.
14. Способ по п.13, при котором второе устройство (5) получает трехмерное изображение окружного периферийного участка внутренней поверхности короны указанной шины и, используя освещение светом, падающим под скользящим углом, двумерные изображения соответствующего окружного периферийного участка наружной поверхности борта, первой части и второй части протектора указанной шины.
15. Способ по любому из пп.11-14, при котором на второй станции (2) третье устройство (12) для получения изображений поверхности шины получает двумерные и трехмерные изображения соответствующих окружных периферийных участков наружной поверхности борта, второй части боковины, первой части и второй части короны шины, и четвертое устройство (13) для получения изображений поверхности шины получает трехмерные изображения соответствующих окружных периферийных участков внутренней поверхности борта, первой части и второй части боковины и плечевой зоны указанной шины.
16. Способ по любому из пп.11-15, при котором на третьей станции (3) пятое устройство (14) для получения изображений поверхности шины получает двумерные изображения соответствующих окружных периферийных участков наружной поверхности борта, боковины и плечевой зоны указанной шины, и шестое устройство (15) для получения изображений поверхности шины получает двумерные изображения соответствующих окружных периферийных участков внутренней поверхности плечевой зоны, борта, первой части и второй части боковины указанной шины.
| US 7568385 B2, 04.08.2009 | |||
| WO 2015004587 A1, 15.01.2015 | |||
| WO 2014049547 A1, 03.04.2014 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| ПРИБОР ДЛЯ ИЗМЕРЕНИЯ ВЫСОТ И ДЛЯ НИВЕЛЛИРОВАНИЯ | 1926 |
|
SU6405A1 |

