Рециркуляционные нагревательные установки (РНУ) широко применяются в промышленности для процессов термообработки различных материалов в газовой и, в частности, воздушной среде. Принцип действия РНУ основан на использовании аэродинамических потерь, т. е. преобразовании кинетической энергии молекул газопотока, циркулирующего в рабочем пространстве, в тепловую энергию, аккумулируемую элементами конструкции рабочей камеры. Поэтому в технике применяется и другое, возможно более явно отражающее принцип действия, название - печь аэродинамических потерь (ПАП), а также, - агрегаты рециркуляционного нагрева (АРН).
Масштабирование ПАП позволяет получать различные уровни температур и температурных градиентов в рабочих камерах печей, обеспечивая им применения в различных технологических процессах (ТП). Однако, существуют процессы, требующие высокоточного выхода на заданную температуру, значение которой может изменяться в широком диапазоне от одного процесса к другому. В такой постановке актуальной становится реализация ПАП, конструктив и система управления которых обеспечивают широкие возможности к их перенастройке и управлению качеством технологического процесса: время регулирования, установившееся значение, перерегулирование, возможность обеспечения нескольких технологических «полок» в технологическом цикле, нагрев и остывание печи по различным законам.
Для достижения перечисленных требований в установке должен быть реализован орган управления и система управления, обеспечивающая программное управление установкой.
Спецификой ПАП является их высокая инерционность, обусловленная необходимостью доведения больших газовых объемов до заданной кондиции при условии распределения процесса нагрева печи по всему объему рабочего пространства.
Общим недостатком РНУ является малая производительность, обусловленная низкой интенсивностью теплообмена между греющим газом (воздухом) и нагреваемыми изделиями. В качестве способа решения указанных проблем предлагается очень сложная аэродинамическая оптимизация элементов рабочей камеры, обеспечивающих рециркуляцию газопотока. При всей важности предлагаемых авторами оптимизирующих решений очевидна их узкая направленность и необходимость последующей адаптации к новым технологическим процессам, в результате чего заказчик становится заложником формулы: новый технологический процесс - новая оптимизированная под него установка.
В изобретении RU 2267724 С2 20.02.2005 в качестве способа управления тепловым режимом установки АРН предлагается частотное управление двигателем роторного нагревателя в фиксированном диапазоне частот, однако не дано четкого описания способа, пригодного к исполнению, а метод частотного управления двигателем описан в учебниках по электроприводу.
Наиболее близким к настоящему изобретению является изобретение RU 2168128 С1 27.05.2001, где упоминается жалюзийная заслонка, установленная перед роторным нагревателем, однако, недостатком является то, что не говорится о каком-либо способе управления заслонкой.
Задачей изобретения является представление способа управления рециркуляционным нагревом печи аэродинамических потерь, сочетающего частотное управление электроприводами роторного нагревателя и управление углом поворота дроссельной жалюзийной заслонки в соответствии с алгоритмом, обеспечивающим ускорение нагрева печи и гибкое управление параметрами технологического процесса.
Поставленная задача решается тем, что в способе управления рециркуляционным нагревом печи аэродинамических потерь синтезируют матрицы прямых и обратных связей; дискретную модель, преобразуют к вертикальной сопровождающей канонической форме и затем к канонической форме управляемости; записывают уравнение замкнутой по состоянию системы; вычисляют полюсы системы для непрерывной модели и задают желаемые полюсы и затем вычисляют их дискретное представление; задают матрицу желаемой динамики дискретной модели в диагональной форме и преобразуют ее с помощью алгоритма Д.К. Фаддеева к форме Фробениуса; формируют в соответствии с теоремой Гамильтона-Кэли характеристический полином исходной дискретной модели в каноническую форму управляемости и по формуле Аккермана вычисляют матрицу обратных связей для канонической формы управляемости; вычисляют обратным преобразованием матрицу обратных связей для исходной дискретной модели; вычисляют общий коэффициент передачи системы для дискретной и непрерывной моделей; вычисляют коэффициент прямой связи; записывают численные значения матрицы прямой связи и обратных связей в память контроллера; далее разогревают печь аэродинамических потерь с помощью роторного нагревателя и управляют качеством процесса нагрева с помощью отклонения дроссельной жалюзийной заслонки, которая программно регулируется контроллером.
Способ управления рециркуляционным нагревом предлагается рассмотреть на примере типовых печей аэродинамических потерь ПАП-3/ПАП-4, выпускаемых в ПАО «Электромеханика», г. Ржева, Тверской обл. РФ.
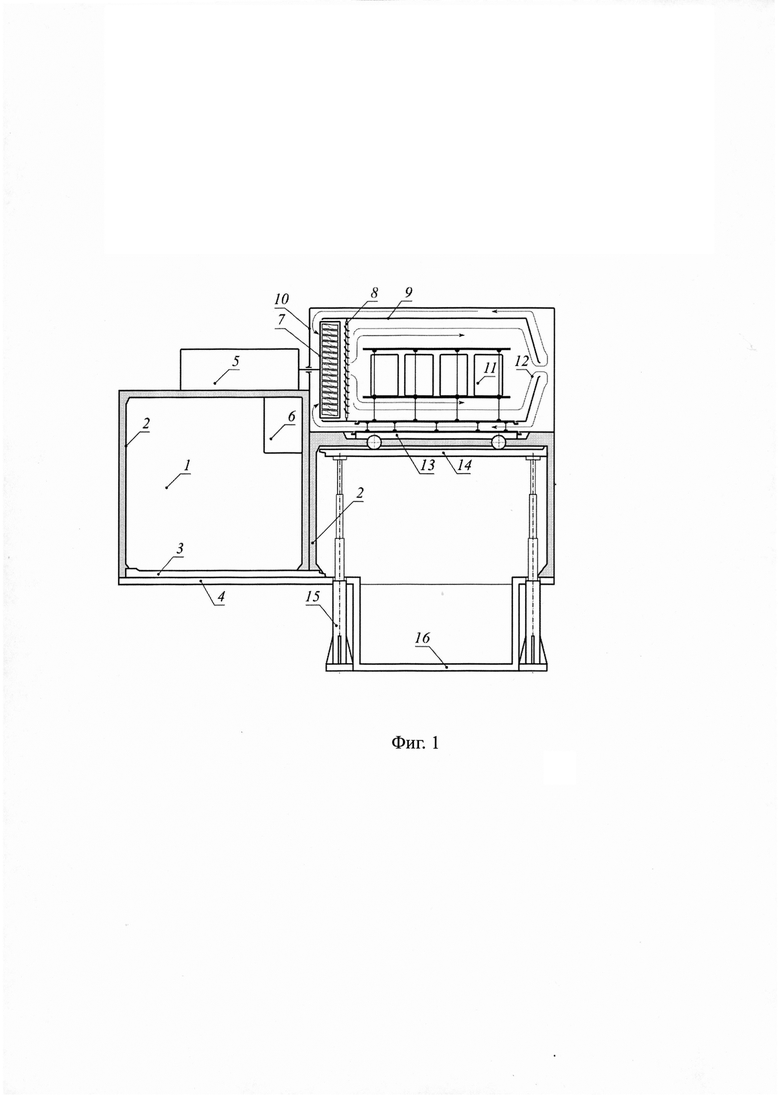
Функциональная схема ПАП представлена на фиг. 1, где принята следующая система обозначений:
1 загрузочный портал;
2 рама;
3 рельсовый путь неподвижный;
4 основание;
5 привод роторного нагревателя;
6 привод погружения садки в закалочную ванну;
7 роторный нагреватель (РН);
8 дроссельная жалюзийная заслонка с приводом (ДЗ);
9 формирователь газопотока;
10 рабочая камера;
11 садка;
12 рециркуляционный газопоток;
13 под-тележка;
14 рельсовый путь подвижный;
15 механизм подъема пода-тележки;
16 закалочная ванна.
Нагревательным модулем установки является роторный нагреватель с частотным приводом. Органом управления является дроссельная жалюзийная заслонка, с изменяемым углом отклонения жалюзи. При неуправляемом нагреве жалюзи полностью открыты (угол отклонения жалюзи равен 0 град.) и не оказывают заметного влияния на циркулирующие воздушные потоки в рабочей камере. При управляемом нагреве жалюзи прикрываются (угол отклонения жалюзи > 0 град.), в результате чего вокруг центробежного вентилятора создается область повышенной плотности воздушных потоков. Вероятность столкновения молекул газовой среды значительно возрастает, что ведет к возрастанию скорости нагрева всего рабочего пространства камеры печи. Того же результата можно было бы добиться общим повышением давления в рабочей камере, однако это достигалось бы гораздо более ресурсоемкими и опасными способами. Сама по себе установка должна была бы проектироваться в рамках обеспечения безопасности сосудов под давлением.
Алгоритм синтеза регулятора привода дроссельной жалюзийной заслонки 8 основан на корневых методах оценки качества динамических систем. Система рециркуляционного нагрева рассматривается в концепции пространства состояний при условии что вектор состояний x(t) представляется температурой Т, ее первой  и второй
и второй  производными по времени:
производными по времени:

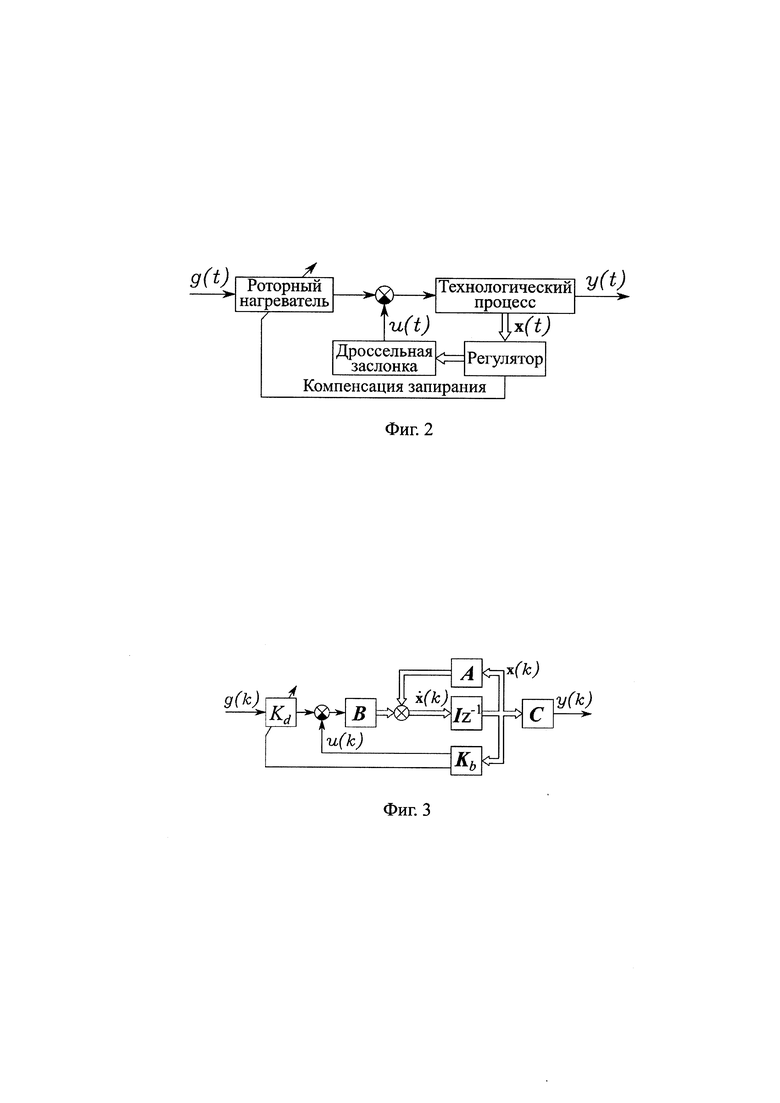
На фиг. 2 представлена структурная схема управления ПАП, которая имеет два модуля воздействия на технологический процесс по прямой и по обратной связям (ПС-РН и ОС-ДЗ); g(t) - задающее воздействие, определяющее требуемую температуру нагрева печи, которое может быть константой или функцией времени; у(t) - выходная переменная; u(t) - управление, осуществляемое по обратной связи, которая замкнута по вектору состояния х(t).
Управляемый нагрев с прикрытыми жалюзи дроссельной жалюзийной заслонки создает дополнительное сопротивление рециркуляционному газопотоку печи, поэтому он должен сопровождаться увеличением скорости вращения центробежного вентилятора роторного нагревателя, что достигается перенастройкой скорости вращения роторного наревателя, обеспечивающей компенсацию запирания дроссельной жалюзийной заслонки.
Управление нагревом ПАП выполняется контроллером, поэтому синтез регулятора необходимо вести в концепции дискретного времени. Структура замкнутой дискретной модели системы с регулятором приведена на фиг 3, где z-1 - элемент задержки на один шаг дискретизации h.
Дискретная модель ПАП, соответствующая структуре (фиг. 3), имеет вид:

где А - матрица коэффициентов объекта управления (ОУ); В - матрица коэффициентов входа; С - матрица-строка коэффициентов выхода, определяемая составом и свойствами датчиков системы управления; k - номер шага дискретизации h.
Матрицы коэффициентов дискретной модели могут быть вычислены различными способами, например, путем приближения матричной экспоненты степенным рядом.
Способ управления рециркуляционным нагревом ПАП реализуют в следующей последовательности.
1. Синтезируют матрицы прямых и обратных связей в соответствии с приведенным ниже алгоритмом.
1.1 Дискретную модель, имеющую матрицы коэффициентов плотной структуры, преобразуют к вертикальной сопровождающей канонической форме:

где в качестве матрицы линейного преобразования используется матрица управляемости (Controllability matrix) дискретной модели:

Структура матриц вертикальной сопровождающей канонической формы имеет вид:

где  - коэффициенты характеристического полинома дискретной модели, которые позволяют построить верхнетреугольную ганкелеву матрицу:
- коэффициенты характеристического полинома дискретной модели, которые позволяют построить верхнетреугольную ганкелеву матрицу:
1.2. Дальнейшей структуризацией с помощью ганкелевой матрицы Н приводят дискретную модель к канонической форме управляемости (КФУ):

Матрица управляемости для КФУ равна обратной ганкелевой матрице H:

1.3. С учетом системы (1) записывают уравнение системы, замкнутой обратной связи по состоянию:

где Q=А-BKb - матрица желаемой динамики дискретной модели ПАП.
1.4 Вычисляют полюсы системы для непрерывной модели:

1.5. Задают полюсы желаемой системы для непрерывного описания:

1.6. Вычисляют их дискретное представление:
λQ=ехр(λQh).
1.7. Задают матрицу желаемой динамики дискретной модели в диагональной форме:
1.8. Преобразуют ее с помощью алгоритма Д.К. Фаддеева (или по формулам Виета) к форме Фробениуса, которая соответствует КФУ:
1.9. В соответствии с теоремой Гамильтона-Кэли формируют характеристический полином исходной дискретной модели в КФУ:

однако, при замене коэффициентов характеристического полинома матрицы AC на коэффициенты характеристического полинома матрицы QC, получают:

1.10. Вводят в рассмотрение матрицу-строку η=(1 0 0)H-1, которая для КФУ имеет следующую структуру: ηC=(0 0 1) и по формуле Аккермана вычисляют матрицу обратной связи для КФУ:

1.11. Матрицу обратной связи для исходной дискретной модели (1) вычисляют обратным преобразованием: 
1.12. Вычисляют общий коэффициент передачи системы для дискретной и непрерывной моделей:

1.13. Вычисляют коэффициент прямой связи Kd (direct):
2 Записывают численные значения матрицы обратной связи Kb и коэффициент прямой связи Kd в память контроллера, управляющего нагревом ПАП.
3. Выполняют загрузку садки в рабочую камеру.
3.1. Под-тележку 13 устанавливают в загрузочный портал 1 на рельсовый путь неподвижный 3, смонтированный на основании 4. На раме 2 загрузочного портала 1 расположены привод роторного нагревателя 5 и привод погружения 6 садки 11 в закалочную ванну 16. Механизм подъема пода-тележки 15 фиксирует рельсовый путь подвижный 14 в нижнем положении на уровне основания 4.
3.2. После загрузки и фиксации садки 11 в под-тележку 13 под-тележку перемещают с рельсового пути неподвижного 3 на рельсовый путь подвижный 14 и фиксируют на нем от дальнейших перемещений.
3.3. Рельсовый путь подвижный 14 расфиксируют в нижнем положении и механизма подъема пода-тележки 15 перемещают его вместе с загруженным подом-тележкой 13 до стыкования с герметичным проемом в нижней части рабочей камеры 10.
3.4. Под-тележку 13 герметично фиксируют в нижнем проеме рабочей камеры 10, образуя с ней единое целое, а садка 11 оказывается размещенной внутри рабочей камеры.
4. Проводят подготовку управляемого нагрева.
4.1. Разгоняют частотно управляемый привод 5 роторного нагревателя 7, и в рабочей камере 10 создается рециркуляционный газопоток 12, структура которого определяется формирователем газопотока 9. Аэродинамические потери, обусловленные взаимодействием газопотока с неподвижными частями конструкции рабочей камеры 10 и садкой 11, приводят к постепенному нагреванию газопотока и внутреннего содержимого рабочей камеры 10, включая садку 11. Дроссельная жалюзийная заслонка 8 находится в раскрытом положении (угол отклонения жалюзи равен нулю) и не оказывает существенного влияния на процесс нагрева газопотока.
5. Проводят управляемый программный нагрев.
5.1. Далее посредством программно управляемого отклонения жалюзи дроссельной жалюзийной заслонки 8 начинают существенно увеличивать скорость нагрева, однако, вместе с тем, подзапирается и газопоток. Таким образом, отклонение жалюзи дроссельной заслонки увеличивает скорость нагрева, но запирание газопотока снижает уровень достижимой температуры.
5.2. С целью компенсации запирания газопотока привод 5 роторного нагревателя дополнительно разгоняют для достижения заданного уровня температуры.
5.3. Ведут управляемый программный нагрев с компенсацией запирания газопотока и гарантированно прогнозируемым достижимым уровнем температуры.
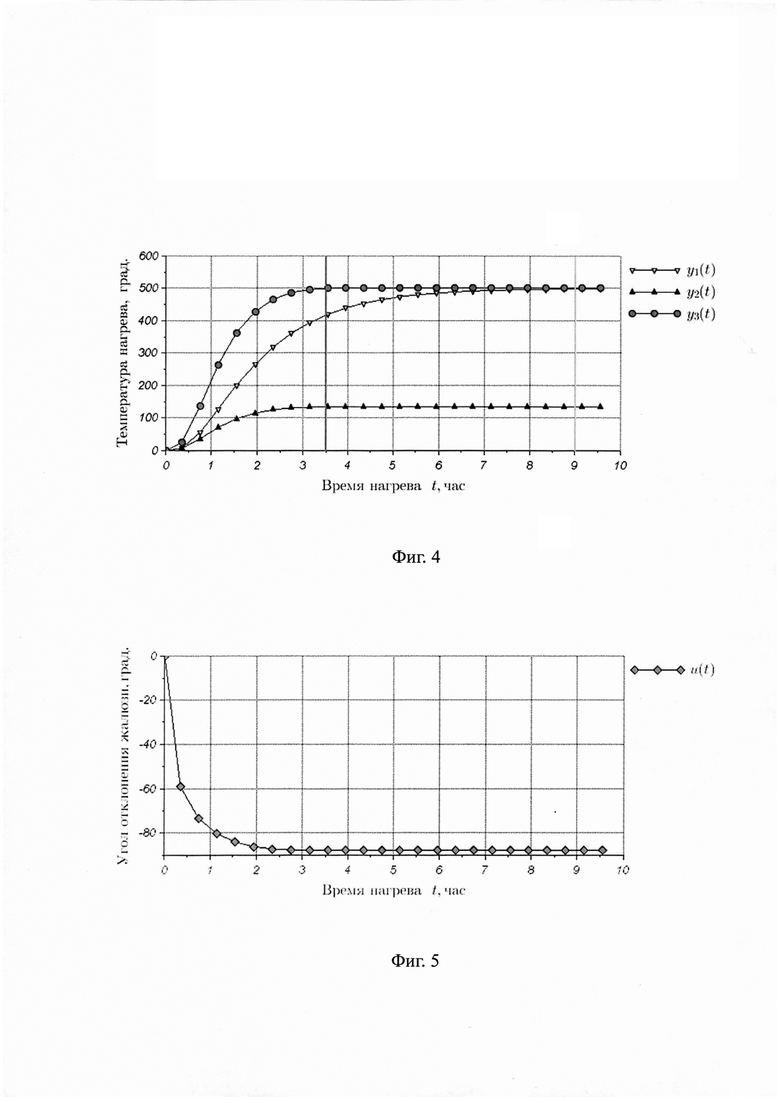
Синтез матриц прямых и обратных связей по приведенному алгоритму можно проводить в любом CAD, поддерживающем матричную алгебру. Процессы нагрева ПАП показаны на фиг. 4. Процесс y1(t) отображает неуправляемый нагрев ПАП с роторным нагревателем (собственное движение динамической системы без обратной связи). Процесс у2(t) отображает управляемый нагрев ПАП с помощью роторного нагревателя при наличии управления u(t) (фиг. 5) (вынужденное движение, обеспеченное ОС посредством программно осуществляемого запирания жалюзи дроссельной заслонки). Процесс у3(t) (фиг. 4) отображает управляемый нагрев ПАП с компенсацией запирания жалюзи дроссельной заслонки посредством коррекции прямой связи. Достигнутый в результате эффект, заключается в почти 3-х кратном ускорении процесса рециркуляционного нагрева.
Первым преимуществом предлагаемого в настоящем изобретении способе рециркуляционного нагрева является прогнозируемый и управляемый процесс нагрева печи аэродинамических потерь. Нагрев ПАП производится приводом 5 роторного нагревателя до заданных температур (500…600°С) приблизительно за 8 часов. Управляемый нагрев до тех же температур достигается приблизительно за 3,5 часа, т.е. длительность нагрева сокращается более, чем в 2 раза, причем, полученные результаты не являются принципиальным пределом возможностей способа. Принципиальным является способ воздействия на процесс нагрева, который обеспечивает широкие возможности управления технологическим процессом при очень низких температурных градиентах по рабочему объему печи (3…5°С).
Отклонение жалюзи с помощью цифрового электропривода обеспечивает не только ускорение нагрева печи, но и является инструментом гибкого управления параметрами технологического процесса, который может подчиняться заданной технологом программе нагрева.
Вторым преимуществом является мобильная система загрузки садки в печь, реализованная с помощью нижнего пода-тележки 13, доставляющего садку 11 в рабочую камеру 10 по рельсовому пути подвижному 14, поднимаемому механизмом подъема 15 пода-тележки 13.
Третьим (опциональным) преимуществом является мобильная система закалки садки в закалочной ванне, обеспеченная приводом погружения садки в закалочную ванну 6 и системой управления процессом закалки.
Технический результат настоящего изобретения заключается в конструктивном, аппаратном и алгоритмическом обеспечении управляемого в широких пределах процесса рециркуляционного нагрева ПАП, который синтезируется в строгом соответствии с требованиями технологического процесса. Представленный аналитический способ синтеза ПАП позволяет достигать прогнозируемых с высокой точностью результатов, ускоряя процесс ввода оборудования в эксплуатацию и увеличивая срок его эксплуатации за счет сокращения эмпирических подгонок к заданным параметрам функционирования.
Описанный способ рециркуляционного нагрева установок типа ПАП и АРН аппаратно и программно реализован и испытан с положительным результатом в ПАО «Электромеханика», г. Ржева, Тверской обл. РФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТАНОВКА ДЛЯ АЭРОДИНАМИЧЕСКОГО НАГРЕВА ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2000 |
|
RU2168128C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕГУЛЯТОРА | 2019 |
|
RU2714567C1 |
| Аэродинамический теплогенератор | 1990 |
|
SU1733868A1 |
| Устройство для термообработки полых изделий | 1973 |
|
SU549479A1 |
| СПОСОБ ТЕПЛОВОЙ ОБРАБОТКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ВЫПЕЧКИ, И УСТАНОВКА ДЛЯ ТЕПЛОВОЙ ОБРАБОТКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ВЫПЕЧКИ | 1996 |
|
RU2123260C1 |
| НАГРЕВАТЕЛЬНАЯ УСТАНОВКА ДЛЯ ОБРАБОТКИ МАТЕРИАЛОВ | 1997 |
|
RU2131934C1 |
| АЭРОДИНАМИЧЕСКАЯ ЛЕСОСУШИЛЬНАЯ КАМЕРА | 1993 |
|
RU2045719C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДЛЯ СИЛОВОЙ УСТАНОВКИ И ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2406851C2 |
| ВАКУУМНАЯ ИНДУКЦИОННАЯ УСТАНОВКА С ПЕЧЬЮ ПОДОГРЕВА ФОРМ | 2005 |
|
RU2297583C2 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235042C1 |
Изобретение относится к способам рециркуляционного нагрева в печах аэродинамических потерь. Предложен способ управления рециркуляционным нагревом печи аэродинамических потерь. Способ содержит этапы, на которых синтезируют матрицы прямых и обратных связей. Дискретную модель преобразуют к вертикальной сопровождающей канонической форме и затем к канонической форме управляемости. Записывают уравнение замкнутой по состоянию системы. Вычисляют полюсы системы для непрерывной модели и задают желаемые полюсы и затем вычисляют их дискретное представление. Задают матрицу желаемой динамики дискретной модели в диагональной форме и преобразуют ее с помощью алгоритма Д.К. Фаддеева к форме Фробениуса. Формируют в соответствии с теоремой Гамильтона-Кэли характеристический полином исходной дискретной модели в каноническую форму управляемости и по формуле Аккермана вычисляют матрицу обратных связей для канонической формы управляемости. Вычисляют обратным преобразованием матрицу обратных связей для исходной дискретной модели. Вычисляют общий коэффициент передачи системы для дискретной и непрерывной моделей. Вычисляют коэффициент прямой связи. Записывают численные значения матрицы прямой связи и обратных связей в память контроллера. Далее разогревают печь аэродинамических потерь с помощью роторного нагревателя и управляют качеством процесса нагрева с помощью отклонения дроссельной жалюзийной заслонки, которая программно регулируется контроллером. Преимуществом изобретения является достижение прогнозируемых с высокой точностью результатов, ускорение процесса ввода оборудования в эксплуатацию и увеличение срока его эксплуатации. 5 ил.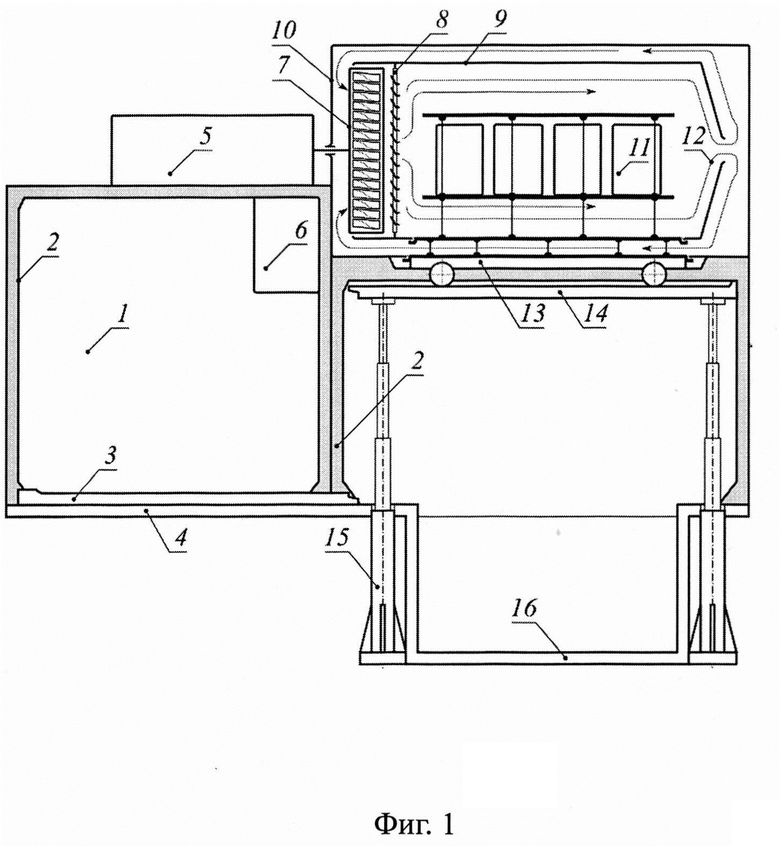
Способ управления рециркуляционным нагревом печи аэродинамических потерь, содержащий этапы, на которых синтезируют матрицы прямых и обратных связей; дискретную модель преобразуют к вертикальной сопровождающей канонической форме и затем к канонической форме управляемости; записывают уравнение замкнутой по состоянию системы; вычисляют полюсы системы для непрерывной модели и задают желаемые полюсы и затем вычисляют их дискретное представление; задают матрицу желаемой динамики дискретной модели в диагональной форме и преобразуют ее с помощью алгоритма Д.К. Фаддеева к форме Фробениуса; формируют в соответствии с теоремой Гамильтона-Кэли характеристический полином исходной дискретной модели в каноническую форму управляемости и по формуле Аккермана вычисляют матрицу обратных связей для канонической формы управляемости; вычисляют обратным преобразованием матрицу обратных связей для исходной дискретной модели; вычисляют общий коэффициент передачи системы для дискретной и непрерывной моделей; вычисляют коэффициент прямой связи; записывают численные значения матрицы прямой связи и обратных связей в память контроллера; далее разогревают печь аэродинамических потерь с помощью роторного нагревателя и управляют качеством процесса нагрева с помощью отклонения дроссельной жалюзийной заслонки, которая программно регулируется контроллером.
| УСТАНОВКА ДЛЯ АЭРОДИНАМИЧЕСКОГО НАГРЕВА ДЛИННОМЕРНЫХ ИЗДЕЛИЙ | 2000 |
|
RU2168128C1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕПЛОВЫМ РЕЖИМОМ УСТАНОВКИ АЭРОДИНАМИЧЕСКОГО НАГРЕВА | 2002 |
|
RU2267724C2 |
| Устройство для термообработки полых изделий | 1973 |
|
SU549479A1 |
| Система идентификации параметров объекта | 1986 |
|
SU1413597A1 |

