со
СП
СО
Изобретение относится к области систем .автоматического управления, а именно к адапт ивным системам управления.
Цель изобретения - расширение функциональных возможностей системы идентификации, заключающееся в рас ширении области изменения входных и выходных сигналов объекта, в кото- рой обеспечивается требуемая точность решения задачи идентификации.
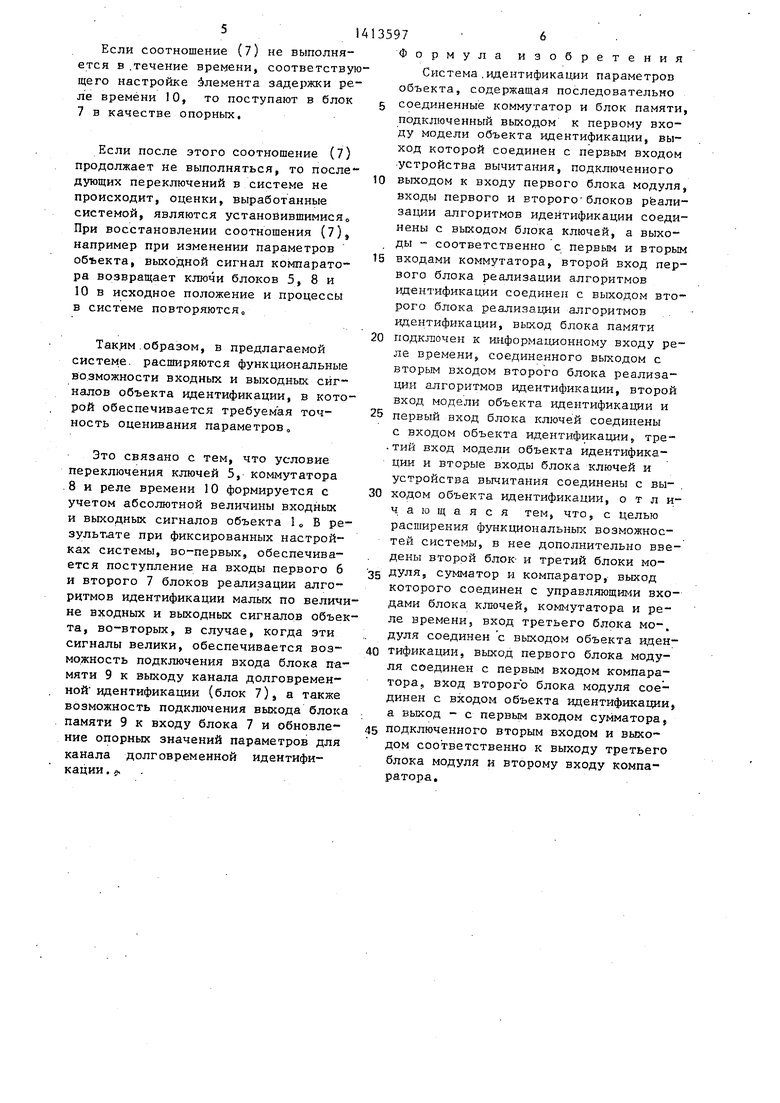
На чертеже приведена функциональная схема предлагаемой системы идентификации,
Система содержит объект идентификации 1; модель объекта идентификации 2, устройство вычитания 3, первый блок модуля 4, блок ключей 5, электронные ключи, первый блок 6 реализа- ции алгоритмов идентификации мик- роЭВМ, второй блок 7 реализации алгоритмов идентификации, коммутатор 8, блок памяти 9, реле времени 10, втот рой 11 и третий 12 блоки модуля; сумматор 13, компаратор 14
Система работает следующим образом.
Структура объекта идентификации 1 задана в виде
X АХ + Ви,(1 ).
где X (Х,, Xj,,...,X) - вектор фазовых координат;
и (и, ,и,о.о ,и) г. вектор управления;
X (Х, ,Х,..о Дп) - вектор фазовых SCKO- ростей; А, В - матрицы
параметров
объекта, в которых неизвестны, к примеру, только последние строки
Пусть
об ,,, о.,)
|Ь .(Р,5|Зг.....Ре)
где oi, PI - неизвестные строки матриц А и В соответственнОо
Сигналы Xj и Х являются для объекта выходными.
Процесс оценивания параметров разделен в системе по двум каналам.
Первый блок реализации алгоритмов идентификации 6 образует канал оперативной идентификации и вырабатьтает оценки параметров объекта по ограни
5
0 5
0
5
Q
5
0
5
J
ченной выборке его входных и выходных сигналов. Второй блок реализации алгоритмов идентификации 7 представляет собой канал долговременной идентификации и оперирует выборками входных и выходных сигналов объекта большего объема
Б каяодом канале могут использоваться различные алгоритмы параметрической идентификации - поисковые и беспоисковые о Рассмотрим работу системы в случае, когда оба канала реализуют метод наименьших квадратов,
Согласно методу оценки параметров объекта в виде расширенного вектора
е/ДЛ ,
K.oijjo.. ,6in,fb,,/J,... ,е являются решением системы линейных алгебраических уравнений, которая в векторно-матричной форме записьшает- ся в виде
СР г,(2)
)(п4е) П1-В где Рек, и reR - матрица
и вектор, вычисленные на основании S измерений входных и выходньк сигналов объекта в моменты времени t; (J 1,S).
р |:z((ti) .
.г X((t; ) , (3) j
Z (X, ,X2 , о о о ,X ,U, jU,,,,Ug } .
Вне зависимости от способа, получения оценок параметров и объема выборок задачи идентификации будет иметь неединственное решение, если процессы на входе - .выходе обтЬекта недостаточно информативны
Общее решение линейного уравнения (2) можно получить из решения экст-- ремальной задачи
||С - . (4)
на уравнении связи (2)„ Это решение имеет вид
С гР + СО(Е - ), (5)
где + - символ псевдообращения;
Е - единичная матрица;
Ср - вектор опорных значений
оценок параметров (вектор притяжения)о
Расчетные формулы (З), (5) программно реализуются в микроЭВМ каналов оперативной и долговременной идентификации Массивы Р формируются по выборкам, состоящим из S последних введенных в микроЭВМ резуль3.1413597
татов измерений входных и выходньЬ
сигналов объекта Для канала долго- временной идентификации параметров S значительно (в 2,10 раз) больше, чем для канала оперативной идентификации.
В качестве исходного вектора при- TH feHHH используются априорные оценки параметров объекта, вводимые в память микроэвм до начала работы системы идентификации. При отсутствии априорной информации исходный вектор притяжения может быть принят нулевым
8процессе работы системы опорные оценки корректируются следующим образом. В канале оперативной иденти фикации (блок 6) в качестве опорных
значений оценок параметров используются текущие оценки, вырабатываемые каналом долговременной идентификации (блок 7Jо В канале долговременной идентификации в качестве опорных используются находящиеся в блоке памяти 9 оценки параметров, уже вьфа- ботанные системой идентификации,Оценки параметров вносятся в блок памяти
9с выходов блоков 6 или 7 в зависимости от положения ключей коммутатора 8„
Уравнение модели о бъекта иденти- 2 имеет вид
X,
ai, X, + oCjXg +
-ы„Х„ +
(6)
+,и, + .и + 00. + |ig Uf ,
где Xf,- - выходной сигнал модели
(оценка фазовой скорости Х„)оI
Устройство вычитания 3 формирует разность поступающих на его входы сигналов фазовой скорости Х объекта вдентификации 1 и ее оценки л„, вьфа- батьтаемой моделью 2 Устройство выделения абсолютной величины 4 формирует модуль этой разности
Г
- V V - I П П I
Этот сигнал поступает rfa вход компаратора 14„ На другой его вход пос-. тупает формируемый сумматором 13 сигнал пропорциональный взвешенной сумме модулей входных сигналов объекта 1 и его фазовых координат
;.OP.Z:KU. 1и;1 -bllK Х;| .
г 1Г(
где Кц. , К. - постоянные коэффи-. диентыо
Сигналы
и )Х;{ формируются
,
|
25
I
блоками модуля 11 и 12 по поступающим на их входы входным сигналам объекта и фазовым координатам объек- та X;.
Для объекта 1, в частности, имеем простое выражение
,Q Ц KJ XI + KjUl,
Выходной сигнал компаратора 14 поступает на управляющие входы блока ключей 5, коммутатора 8 и реле времени 10о Указанный сигнал зависит J5 от вЬтолнения неравенства.
Ьор (7)
Если оНо выполняется, то ключи блока 5 замкнуты и пропускают на входы блоков 6 и 7 выборки входных
20 и выходных сигналов объекта, эти выборки вводятся аналого-цифровыми преобразователями в микроЭВМ, входы блока памяти 9 через коммутатор 8 соединены с выходом блока 6, ключи реле времени 10 разомкнуты,
В этом случае в модель 2 вводят- ся оценки, вырабатьшаемые каналом оперативной идентификации, а оценки, вырабатьшаемые каналом оперативной
30 идентификации, каналом долговременной идентификации, используются только в качестве опорных в первом канале о
Каковы бы ни были условия иденти35 фикации, в том числе и при вырожденности задачи, оперативные оценки параметров, вырабатьшаемые блоком 6, минимизируют невязку . Использование в блоке 6-оценок, вырабатьшаемых
40 каналом долговременной идентификации, в качестве опорных повьшает точность оперативных оценоко
Величина невязки становится меньше пороговой величины пор t
45 компаратор J4 вырабатывает сигнал, приводящий к пере слюченин) блока 5 и коммутатора 8,
Входы, блоков 6 и 7 отключаются при этом от входа и выхода объекта
идентификации 1, после чего перестают вырабатываться новые оценки параметров в этих блокахо Ключи коммутатора переключаются в положение, при котором входы блока памяти 9 подклю55 чены к выходам второго блока реализации алгоритмов идентификации 7, в модель 2 поступают оценки, выработанные этим блоком.
51
Если соотношение (7) не выполняется в .течение времени, соответствующего настройке Элемента задержки реле времени 10, то поступают в блок 7 в качестве опорных,
Если после этого соотношение (7) продолжает не выполняться, то последующих переключений в системе не происходит, оценки, выработанные системой, являются установившимися„ При восстановлении соотношения (7), например при изменении параметров объекта, выходной сигнал компаратора возвращает ключи блоков 5, 8 и 10 в исходное положение и процессы в системе повторяются,
Так.им .образом, в предлагаемой системе, расширяются функциональные возможности входных и выходных сигналов объекта идентификации, в которой обеспечивается требуемая точность оценивания параметров.
Это связано с тем, что условие переключения ключей 5, коммутатора .8 и реле времени 10 формируется с учетом абсолютной величины входных и выходных сигналов объекта 1„ В ре- зультлте при фиксированных настрой™ ках системы, во-первых, обеспечивается поступление на входы первого б и второго 7 блоков реализации алгоритмов идентификации малых по величине входных и выходных сигналов объекта, во-вторых, в случае, когда эти сигналы велики, обеспечивается возможность подключения входа блока памяти 9 к выходу канала долговременной идентификации (блок 7)j а также возможность подключения выхода блока памяти 9 к входу блока 7 и обновле кие опорных значений параметров для канала долговременной идентификации . f.
3597 6
Формула изобретения
Система.идентификации параметров объекта, содержащая последовательно
5 соединенные коммутатор и блок памяти, подключенный выходом к первому входу модели объекта идентификации, выход которой соединен с первым входом устройства вычитания, подключенного
0 выходом к входу первого блока модуля, входы первого и второго блоков реализации алгоритмов идентификации соединены с выходом блока ключей, а выходы - соответственно с первым и вторьм
15 входами коммутатора, второй вход первого блока реализации алгоритмов идентификации соединен с выходом второго блока реалияа1 ди алгоритмов идентификации, выход блока памяти
0 подключен к информационному входу реле времени, соединенного выходом с вторым входом второго блока реализации алгоритмов идентификации, второй вход модели объекта идентификации и
25 первы.й вход блока ключей соединены с входом объекта идентификации,, тре- .тин вход модели объекта идентификации и вторые входы блока ключей и устройства вычитания соединены с вы30 ходом объекта идентификации, отличающаяся тем, что, с целью расширения функциональньпс возможностей системы, в нее дополнительно введены второй блок- и третий блоки мо35 дуля, сумматор и компаратор, выход которого соединен с управляющими входами блока ключей, коммутатора и реле времени, вход третьего блока мо-,
дуля соединен с выходом объекта иден40 тификации, выход первого блока модуля соединен с первым входом компаратора,, вход второго блока модуля соединен с входом объекта идентификации, а выход - с первым входом сумматора,
45 подключенного вторым входом и выходом соответственно к выходу третьего блока модуля и второму входу компаратора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система идентификации параметров объекта | 1983 |
|
SU1156001A1 |
| Система идентификации параметров объекта | 1980 |
|
SU949635A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И ЭТАЛОННОЙ МОДЕЛЬЮ | 2001 |
|
RU2191419C1 |
| Система идентификации параметров многомерного нелинейного динамического объекта | 1986 |
|
SU1385122A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ ПРИ ВРЕМЕННЫХ ЗАДЕРЖКАХ ИНФОРМАЦИИ В СИСТЕМЕ УПРАВЛЕНИЯ | 2001 |
|
RU2192031C1 |
| СИСТЕМА ДИСТАНЦИОННОГО РАДИАЦИОННОГО КОНТРОЛЯ СОСТОЯНИЯ ОБЪЕКТА | 1999 |
|
RU2182343C2 |
| АВТОМАТИЗИРОВАННОЕ УСТРОЙСТВО КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ РАДИОЭЛЕКТРОННЫХ ИЗДЕЛИЙ | 1998 |
|
RU2174699C2 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С ДВУХЭТАПНЫМ ИДЕНТИФИКАТОРОМ И НЕЯВНОЙ ЭТАЛОННОЙ МОДЕЛЬЮ | 2002 |
|
RU2231819C2 |
| Устройство для идентификации параметров объекта | 1981 |
|
SU987580A1 |
| Система для моделирования широкополосныхСлучАйНыХ ВибРОпРОцЕССОВ | 1978 |
|
SU805325A1 |
Изобретение относится к адаптивным системам управления. Цель изобретения расширение функциональных возможностей системы (расширение области изменения входных и выходных сигналов объекта идентификации, в которой обеспечивается требуемая точность оценок параметров). Она дости- .гается тем, что сигнал управления коммутирующими элементами системы формируется компаратором, на один из входов которого подается напряжение,, пропорциональное разности выходных сигналов объекта и его модели, а на другой вход - напряжение, пропорциональное -сумме модулей входных и выходных сигналов объекта. В результате не прекращается выработка новых оценок при малых координатах объекта и повьппается точность оценок при больших координатах. 1 ил. i (Л
| Система идентификации параметров объекта | 1980 |
|
SU949635A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
