Текст описания приведен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВЫМ АГРЕГАТОМ | 2017 |
|
RU2660679C1 |
| КОНТРОЛЛЕР | 2005 |
|
RU2373560C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2015 |
|
RU2614050C1 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВИГАТЕЛЯ | 2017 |
|
RU2683344C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ДИЗЕЛЬНОГО ДВИГАТЕЛЯ С ТУРБОНАДДУВОМ | 2011 |
|
RU2563441C1 |
| ОПРЕДЕЛЕНИЕ ОБЪЕМА КОЛЛЕКТОРА НА ОСНОВЕ ЧАСТОТЫ ПОМПАЖА | 2016 |
|
RU2703587C2 |
| Аппарат для испытаний двигателей (варианты) | 2016 |
|
RU2713811C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИГАТЕЛЕМ ВНУТРЕННЕГО СГОРАНИЯ И СПОСОБ УПРАВЛЕНИЯ | 2014 |
|
RU2618146C1 |
| КОНТРОЛЛЕР ДЛЯ ГИБРИДНОЙ СИСТЕМЫ | 2020 |
|
RU2754594C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СИЛОВОЙ УСТАНОВКОЙ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА МОДУЛЯЦИИ | 2005 |
|
RU2372639C2 |
Изобретение относится к двигателестроению, в частности к системам управления для силовой установки и двигателя внутреннего сгорания. Технический результат - система управления для силовой установки и двигателя внутреннего сгорания обеспечивает возможность повышения управляемости и точности управления в случае регулирования множества управляющих величин при одновременном устранении взаимосвязи, существующей между множеством входных сигналов управления и управляющих величин. Система управления для силовой установки, в которой между множеством входных сигналов управления и множеством управляющих величин существует взаимосвязь, содержит средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки в виде модели системы с дискретным временем. Определенный алгоритм управления включает в себя комбинацию определенного алгоритма управления с назначением отклика и определенного алгоритма автономного управления. В формуле раскрыты три варианта системы управления для силовой установки. 4 н. и 18 з.п. ф-лы, 39 ил.
1. Система управления для силовой установки, в которой между множеством входных сигналов управления и множеством управляющих величин существует взаимосвязь, содержащая:
средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки в виде модели системы с дискретным временем, причем определенный алгоритм управления включает в себя комбинацию определенного алгоритма управления с назначением отклика и определенного алгоритма автономного управления.
2. Система управления по п.1, отличающаяся тем, что модель силовой установки включает в себя множество невзаимосвязанных параметров для определения зависимостей между входными сигналами управления и управляющими величинами, указанное средство вычисления невзаимосвязанных входных сигналов вычисляет соответствующие невзаимосвязанные входные сигналы с помощью определенного алгоритма управления в соответствии, по меньшей мере, с одним из: невзаимосвязанных параметров и управляющих величин, и система управления дополнительно содержит средство идентификации для последовательной идентификации невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки.
3. Система управления по п.2, отличающаяся тем, что указанное средство идентификации вычисляет опорные значения невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки, вычисляет множество величин коррекции с помощью определенного алгоритма последовательной идентификации в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки и идентифицирует невзаимосвязанные параметры путем коррекции опорных значений невзаимосвязанных параметров с помощью соответствующих величин коррекции.
4. Система управления для силовой установки, в которой между множеством входных сигналов управления и множеством управляющих величин существует взаимосвязь, содержащая:
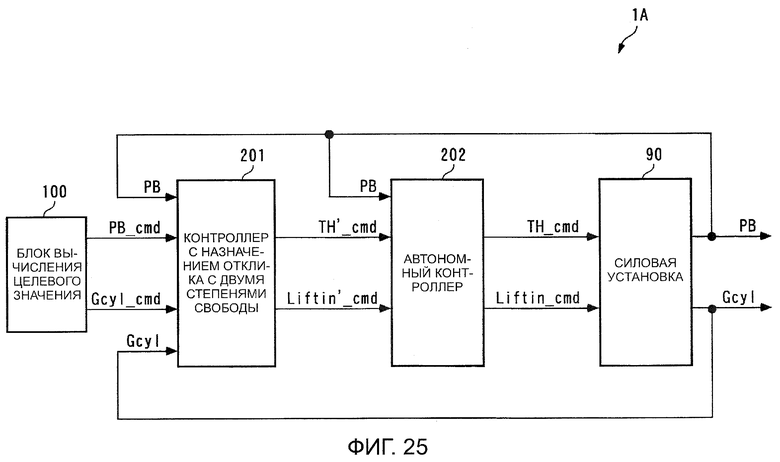
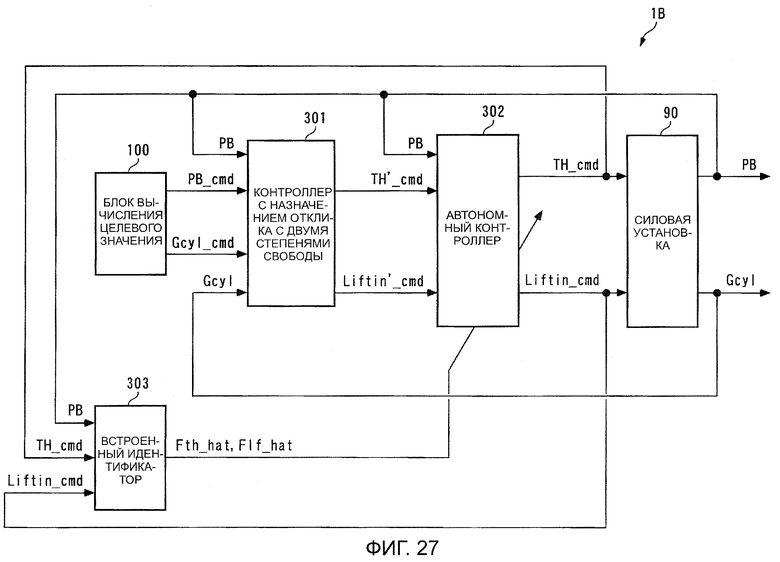
средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки, включающего в себя комбинацию определенного алгоритма управления с двумя степенями свободы и определенного алгоритма автономного управления, причем определенный алгоритм управления с двумя степенями свободы представляет собой алгоритм, сформированный путем объединения определенного алгоритма фильтра целевого значения и определенного алгоритма управления с обратной связью.
5. Система управления по п.4, отличающаяся тем, что определенный алгоритм управления с обратной связью представляет собой определенный алгоритм управления с назначением отклика.
6. Система управления по п.4, отличающаяся тем, что модель силовой установки включает в себя множество невзаимосвязанных параметров для определения зависимости между входными сигналами управления и управляющими величинами, указанное средство вычисления невзаимосвязанных входных сигналов вычисляет соответствующие невзаимосвязанные входные сигналы с помощью определенного алгоритма управления в соответствии, по меньшей мере, с одним из: невзаимосвязанных параметров и управляющих величин, и система управления дополнительно содержит средство идентификации для последовательной идентификации невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки.
7. Система управления по п.6, отличающаяся тем, что указанное средство идентификации вычисляет опорные значения невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки, вычисляет множество величин коррекции с помощью определенного алгоритма последовательной идентификации в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки и идентифицирует невзаимосвязанные параметры путем коррекции опорных значений невзаимосвязанных параметров с помощью соответствующих величин коррекции.
8. Система управления для силовой установки, в которой между множеством входных сигналов управления и множеством управляющих величин существует связь, содержащая:
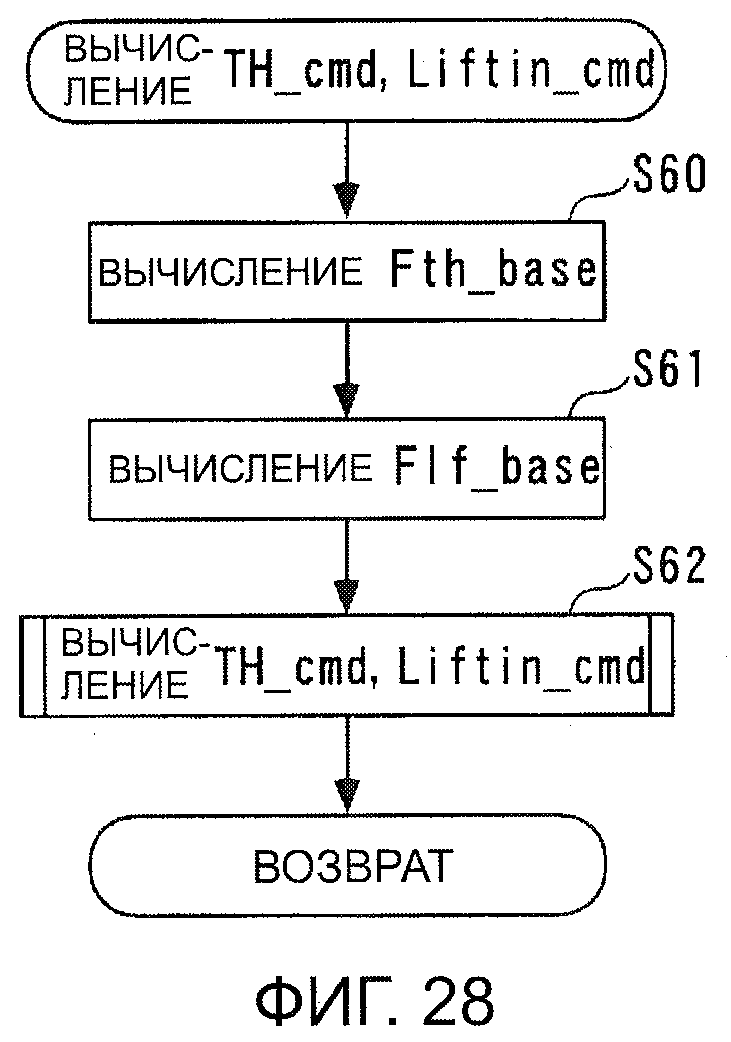
средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, с помощью определенного алгоритма управления, основанного на модели силовой установки, сформированной путем моделирования силовой установки, включающего в себя определенный алгоритм автономного управления, причем модель силовой установки включает в себя множество невзаимосвязанных параметров для определения зависимости между входными сигналами управления и управляющими величинами,
указанное средство вычисления невзаимосвязанных входных сигналов вычисляет соответствующие невзаимосвязанные входные сигналы с помощью определенного алгоритма управления в соответствии, по меньшей мере, с одним из: невзаимосвязанных параметров и управляющих величин, и система управления дополнительно содержит средство идентификации для последовательной идентификации невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки.
9. Система управления по п.8, отличающаяся тем, что указанное средство идентификации вычисляет опорные значения невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки, вычисляет множество величин коррекции с помощью определенного алгоритма последовательной идентификации в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и внутренней переменной силовой установки, и идентифицирует невзаимосвязанные параметры путем коррекции опорных значений невзаимосвязанных параметров с помощью соответствующих величин коррекции.
10. Система управления для двигателя внутреннего сгорания для регулирования множества управляющих величин в нем с помощью множества соответствующих входных сигналов управления, в которой между управляющими величинами и входными сигналами управления существует взаимосвязь, содержащая:
средство задания целевых значений для задания множества целевых значений, которые являются заданными значениями соответствующих управляющих величин; и средство вычисления невзаимосвязанных входных сигналов для вычисления входных сигналов управления в качестве соответствующих невзаимосвязанных входных сигналов, устраняющих взаимосвязь, для обеспечения слежения управляющих величин за соответствующими целевыми значениями с помощью определенного алгоритма управления, включающего в себя определенный алгоритм автономного управления.
11. Система управления по п.10, отличающаяся тем, что указанное средство вычисления невзаимосвязанных входных сигналов вычисляет соответствующие невзаимосвязанные входные сигналы с помощью определенного алгоритма управления в соответствии, по меньшей мере, с одной из управляющих величин и, по меньшей мере, с одним из: входных сигналов управления и параметра рабочего состояния, характеризующего рабочее состояние двигателя.
12. Система управления по п.11, отличающаяся тем, что определенный алгоритм автономного управления представляет собой алгоритм, основанный на модели силовой установки, определяющей зависимости между управляющими величинами и входными сигналами управления, модель силовой установки включает в себя множество невзаимосвязанных параметров для определения зависимостей между входными сигналами управления и управляющими величинами, указанное средство вычисления невзаимосвязанных входных сигналов вычисляет соответствующие невзаимосвязанные входные сигналы с помощью определенного алгоритма управления и, кроме того, в соответствии с невзаимосвязанными параметрами, и система управления дополнительно содержит средство идентификации для последовательной идентификации невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и параметра рабочего состояния.
13. Система управления по п.12, отличающаяся тем, что указанное средство идентификации вычисляет опорные значения невзаимосвязанных параметров в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и параметра рабочего состояния, вычисляет множество величин коррекции с помощью определенного алгоритма последовательной идентификации в соответствии, по меньшей мере, с одним из: невзаимосвязанных входных сигналов, управляющих величин и параметра рабочего состояния, и идентифицирует невзаимосвязанные параметры путем коррекции опорных значений невзаимосвязанных параметров с помощью соответствующих величин коррекции.
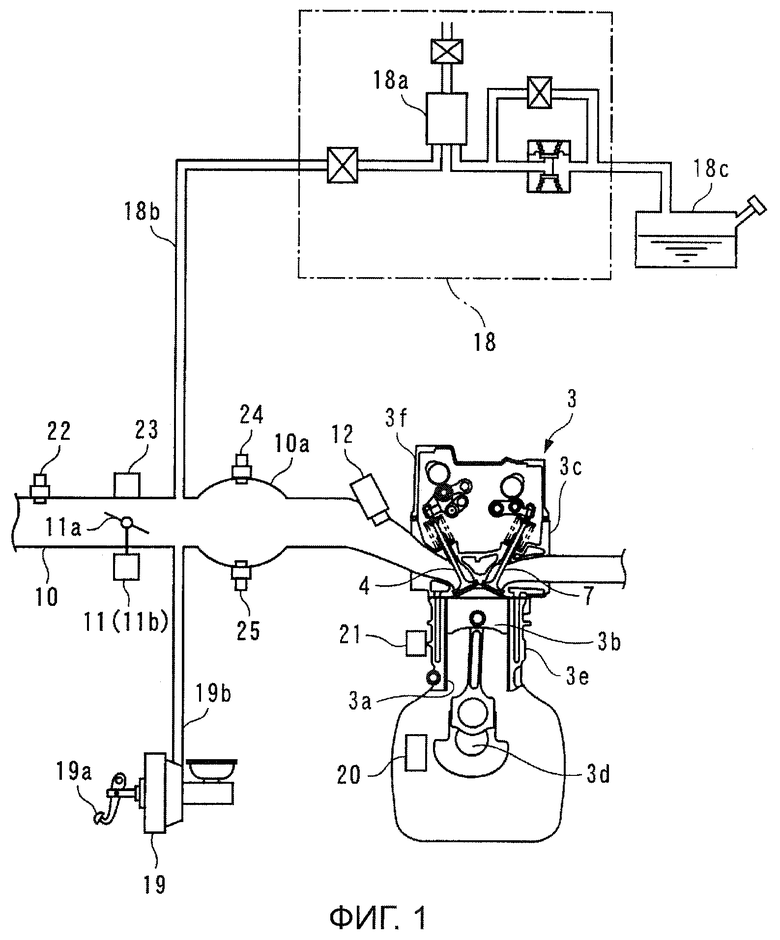
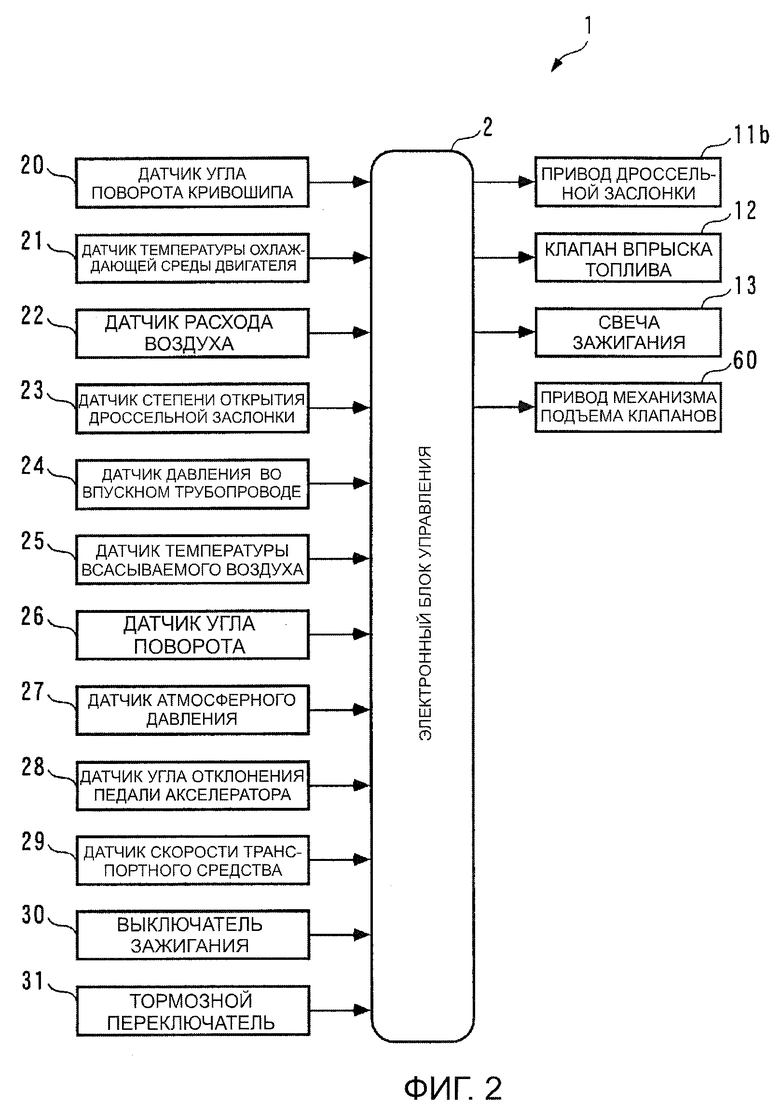
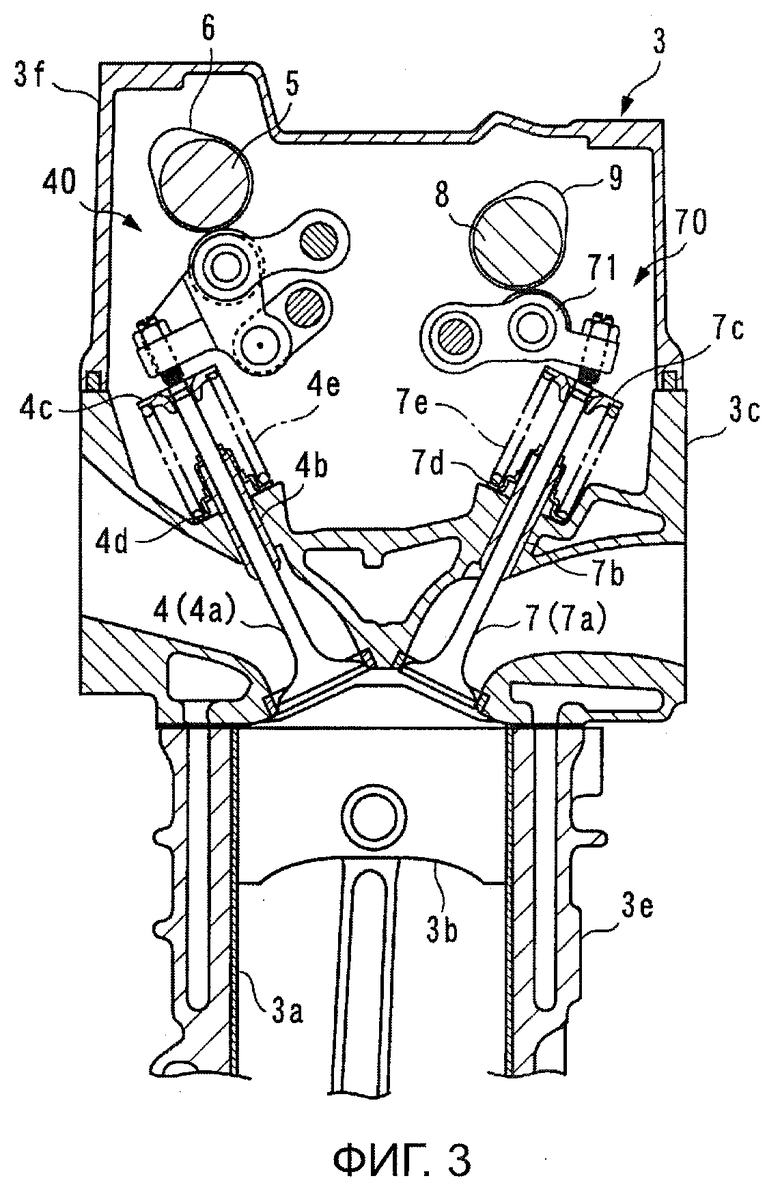
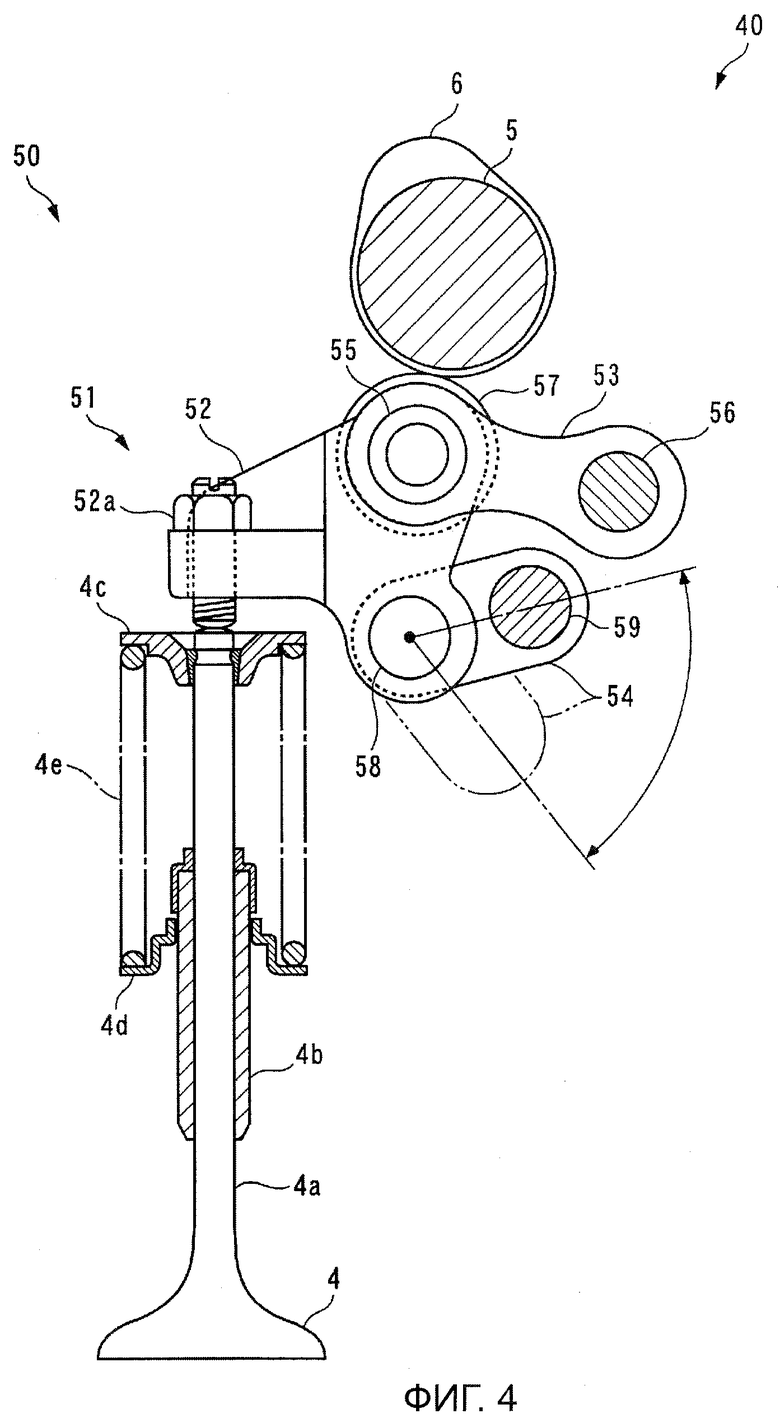
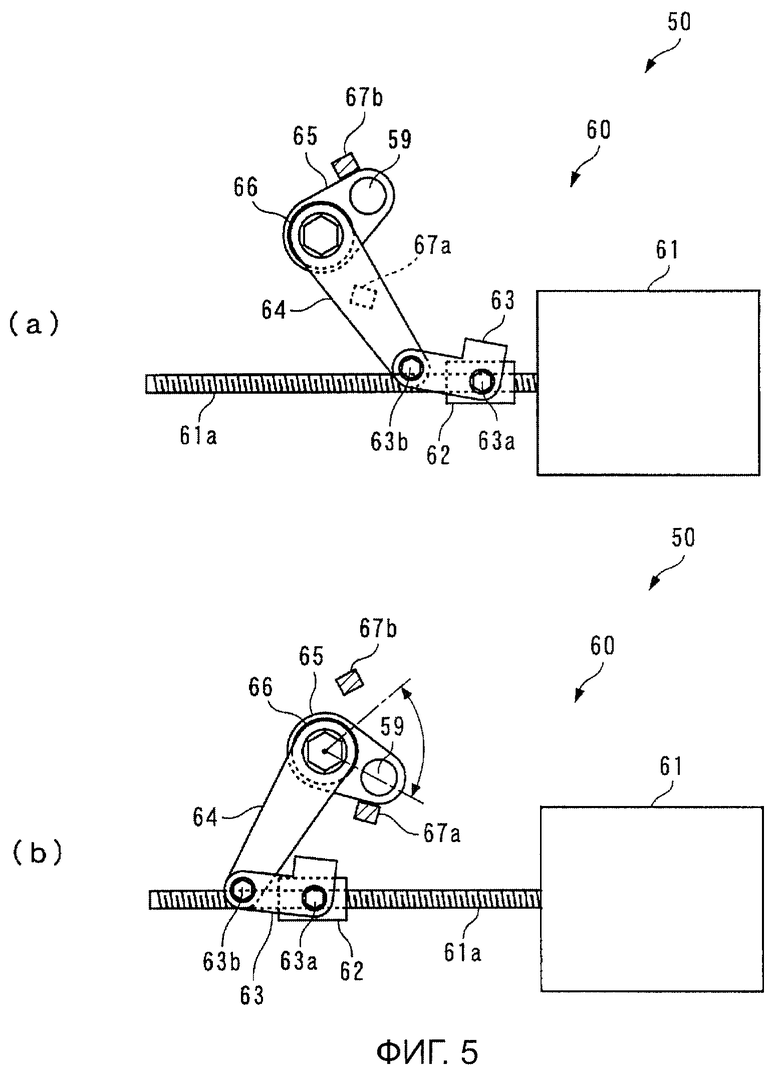
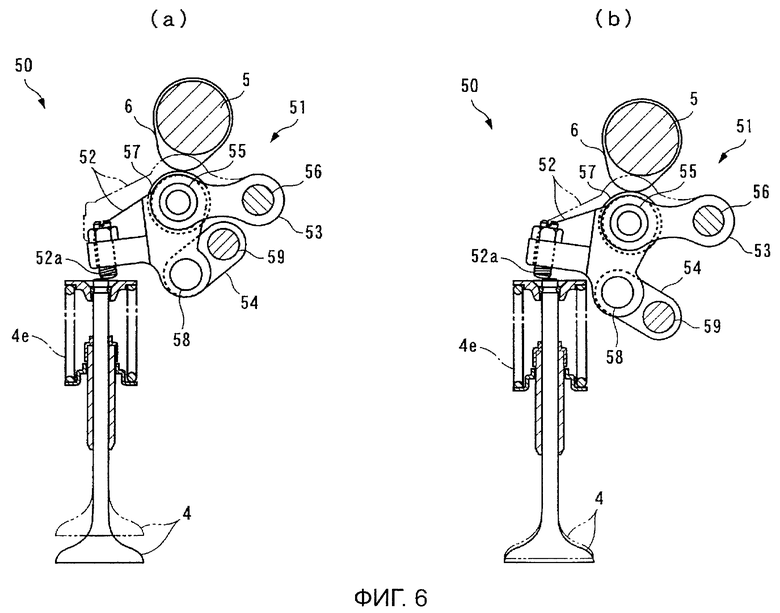
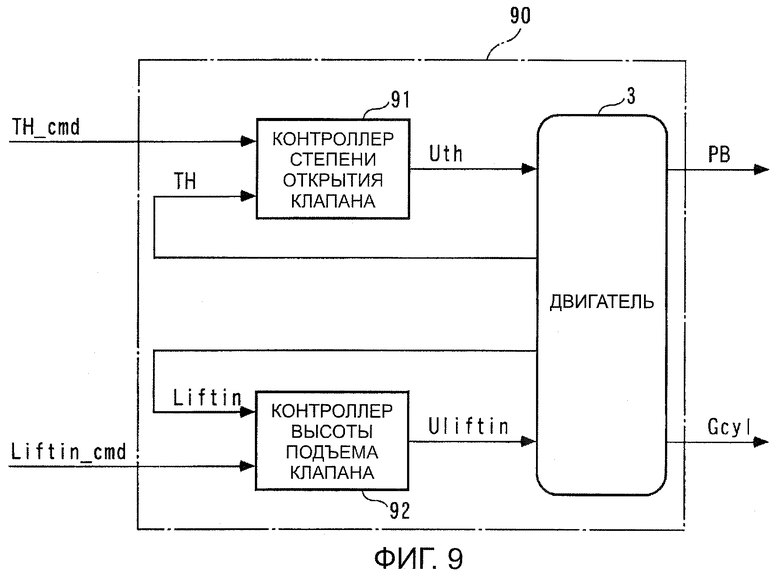
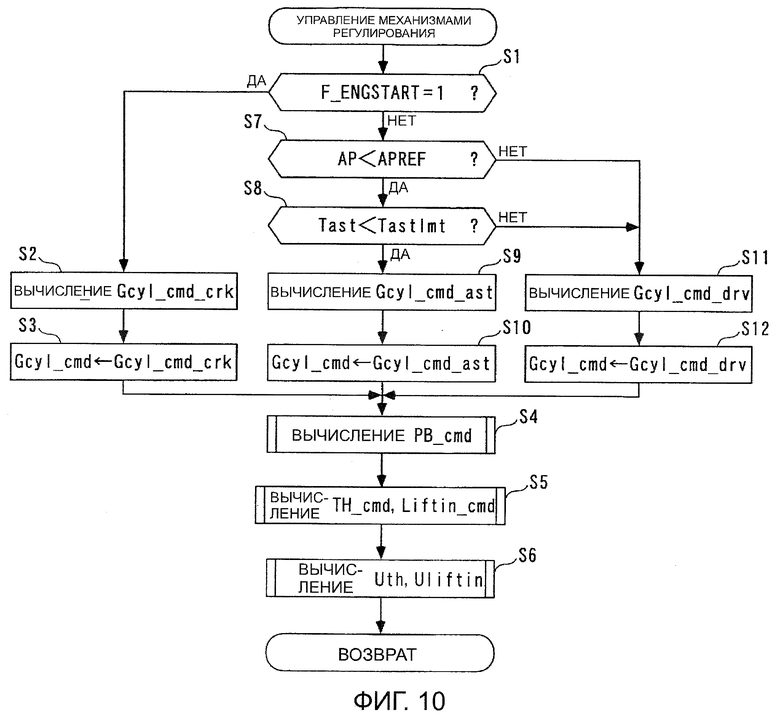
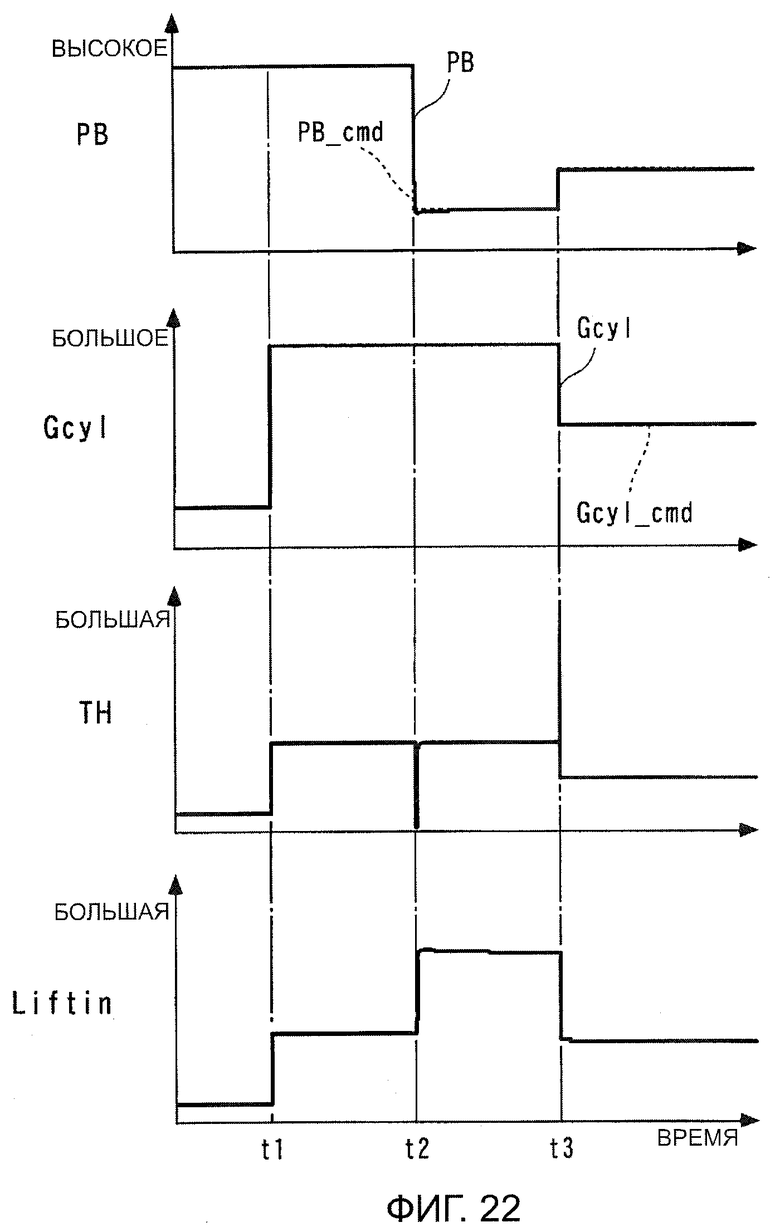
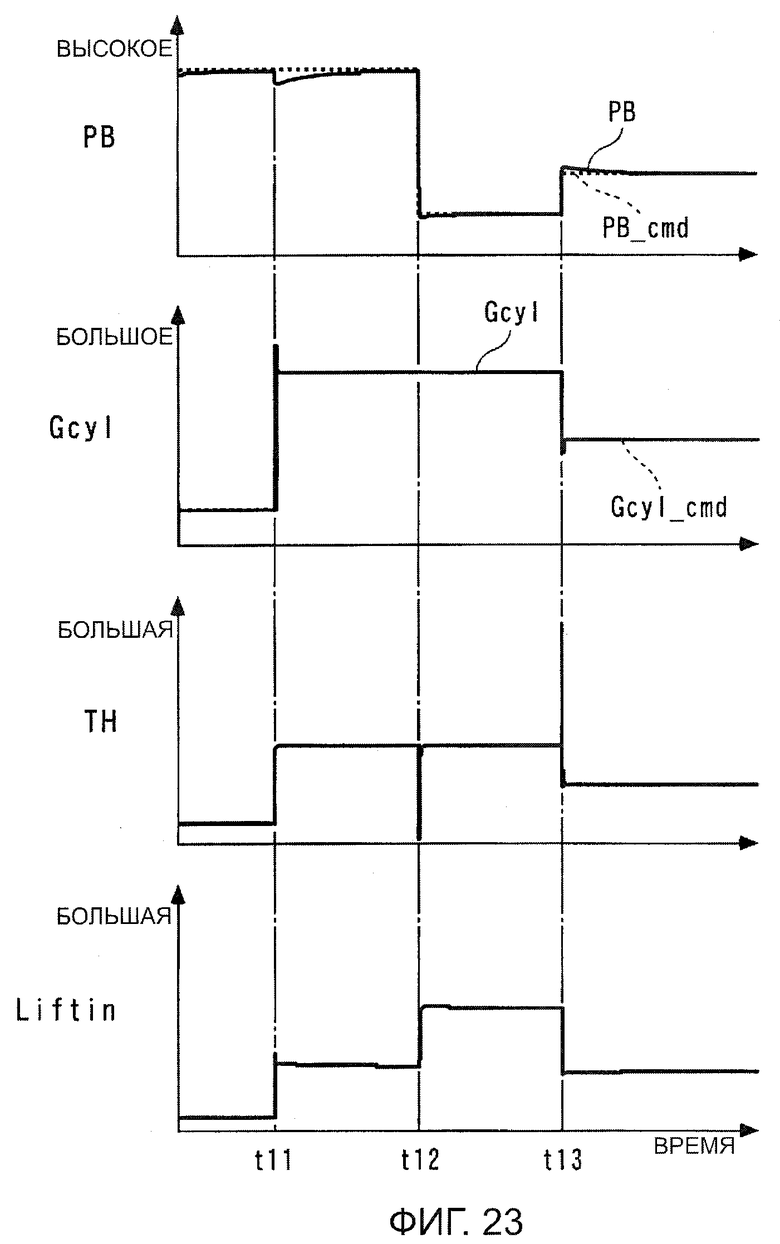
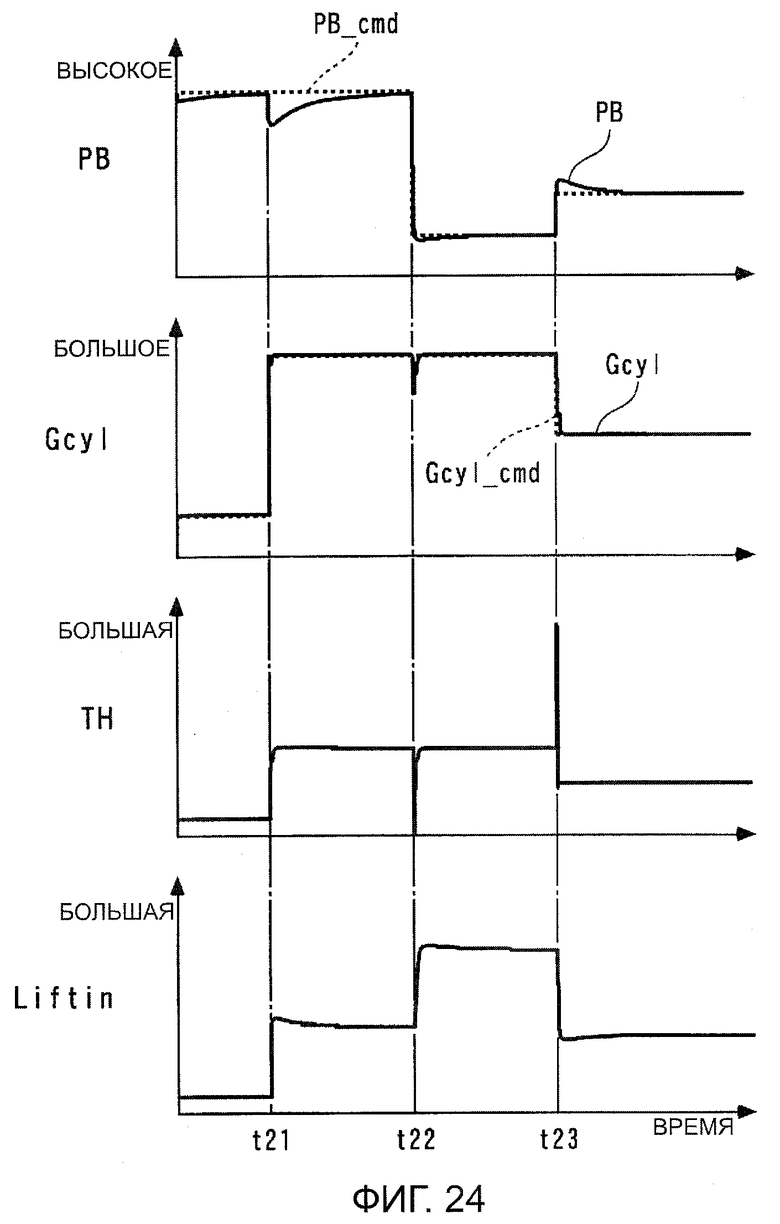
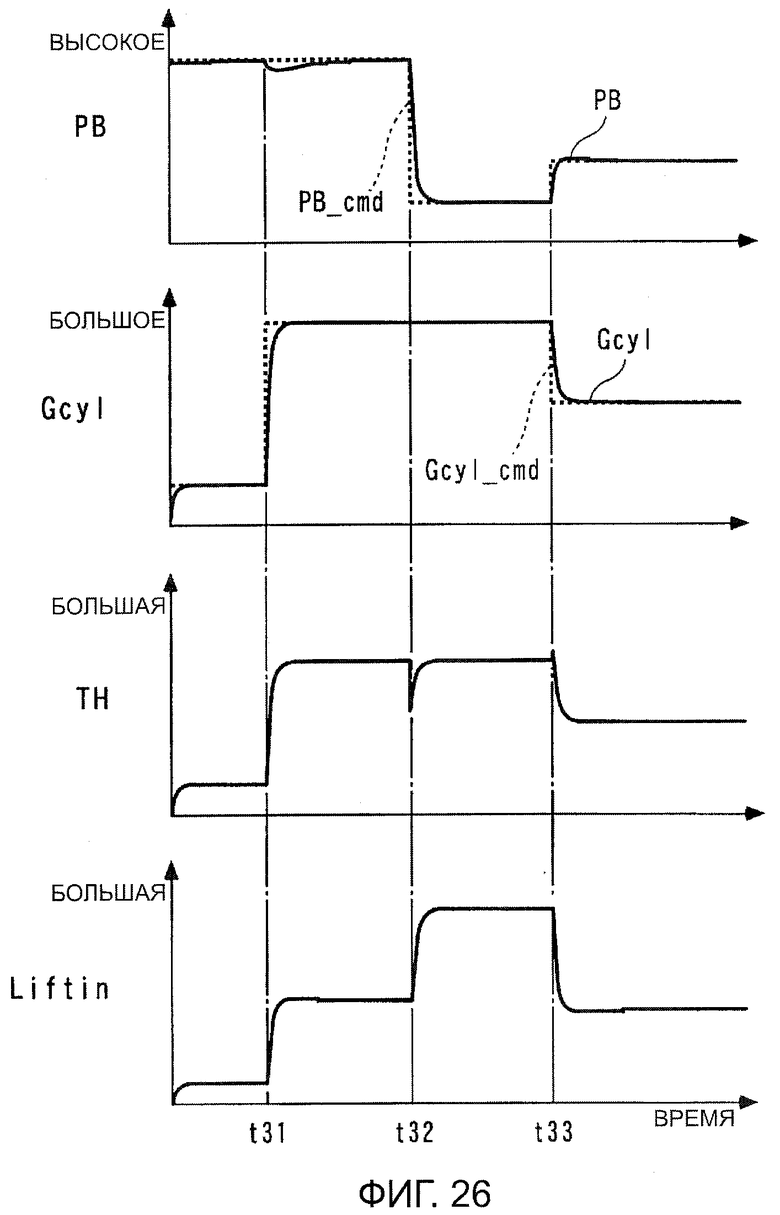
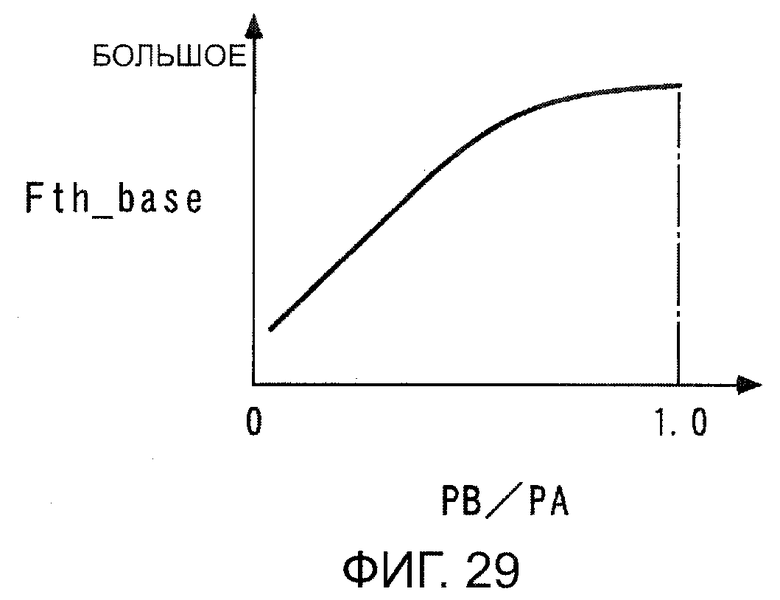
14. Система управления по п.10, отличающаяся тем, что двигатель включает в себя механизм дроссельной заслонки для изменения степени открытия дроссельной заслонки и механизм регулирования высоты подъема клапанов для изменения высоты подъема впускного клапана, управляющие величины представляют собой давление во впускном канале двигателя и количество всасываемого воздуха, а входные сигналы управления представляют собой контрольное значение степени открытия для регулирования степени открытия дроссельной заслонки и контрольное значение высоты подъема для регулирования высоты подъема впускного клапана.
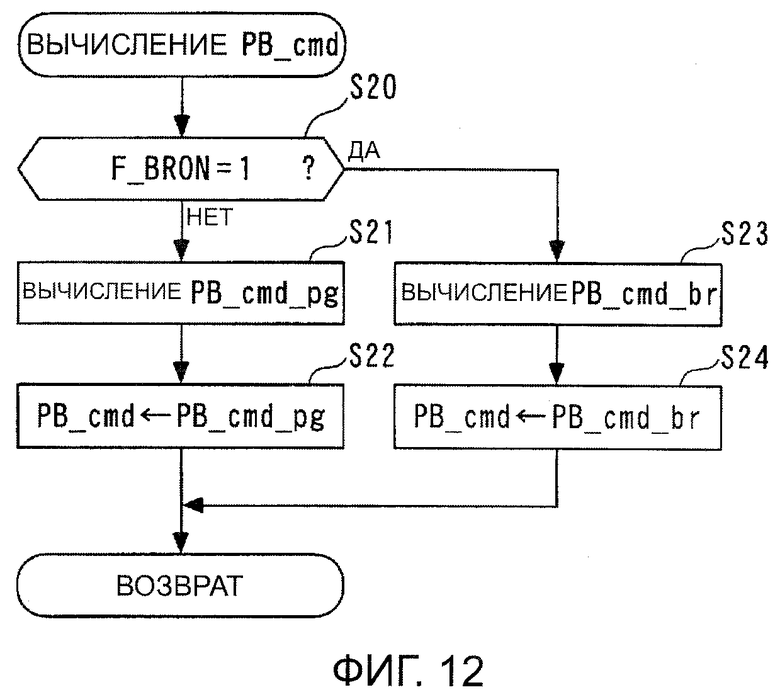
15. Система управления по п.14, отличающаяся тем, что двигатель дополнительно включает в себя систему обработки паров топлива для временного поглощения паров топлива, образовавшихся внутри камеры сгорания, и подачи поглощенных паров топлива во впускной канал под действием давления во впускном канале, а указанное средство задания целевых значений задает целевое значение давления во впускном канале в период до истечения определенного промежутка времени после запуска двигателя равным более низкому значению, чем по истечении этого определенного промежутка времени.
16. Система управления по п.14, отличающаяся тем, что двигатель дополнительно включает в себя:
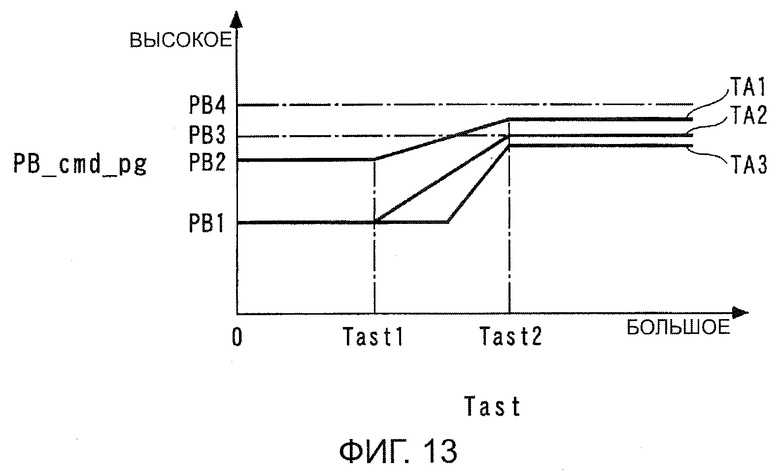
систему обработки паров топлива для временного поглощения паров топлива, образовавшихся внутри камеры сгорания, и подачи поглощенных паров топлива во впускной канал под действием давления во впускном канале, и средство измерения параметра скорости образования для измерения параметра скорости образования, характеризующего скорость образования паров топлива внутри камеры сгорания двигателя, а указанное средство задания целевых значений задает целевое значение давления во впускном канале равным тем более низкому значению, чем больше скорость образования паров топлива, характеризуемая измеренным параметром скорости образования.
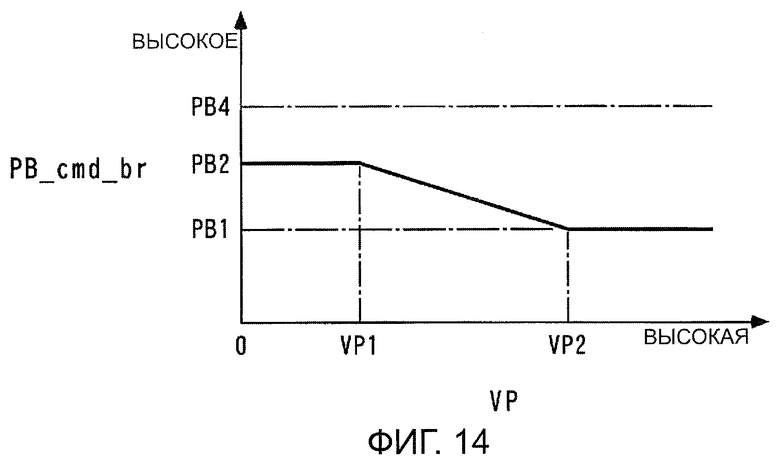
17. Система управления по п.14, отличающаяся тем, что двигатель используется в качестве источника движущей силы транспортного средства, с впускным каналом двигателя в качестве источника вспомогательной силы соединено устройство развития вспомогательной силы для компенсации тормозного усилия транспортного средства, а указанное средство задания целевых значений при выполнении условий подачи разрежения в устройство развития вспомогательной силы задает целевое значение давления во впускном канале равным более низкому значению, чем при невыполнении этих условий.
18. Система управления по п.17, отличающаяся тем, что указанное средство задания целевых значений при выполнении условий подачи разрежения в устройство развития вспомогательной силы задает целевое значение давления во впускном канале равным тем более низкому значению, чем выше скорость транспортного средства.
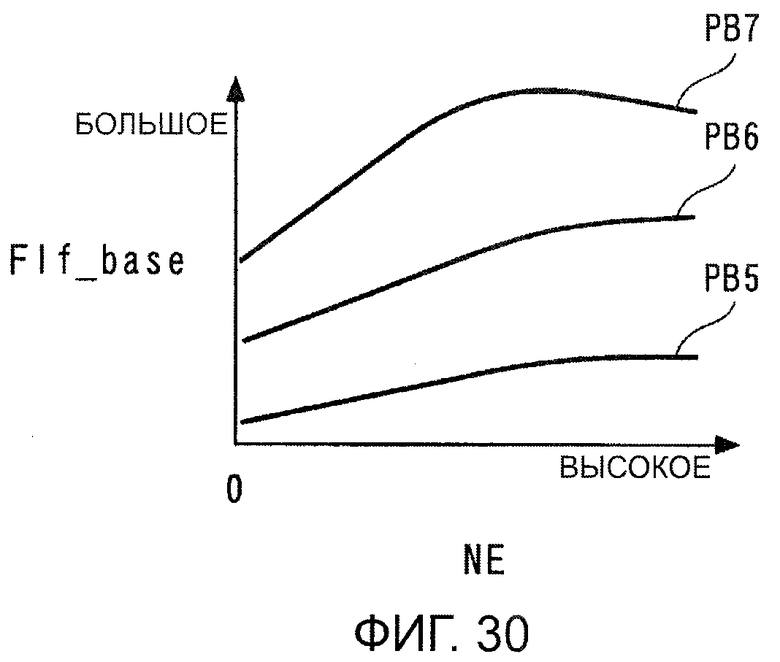
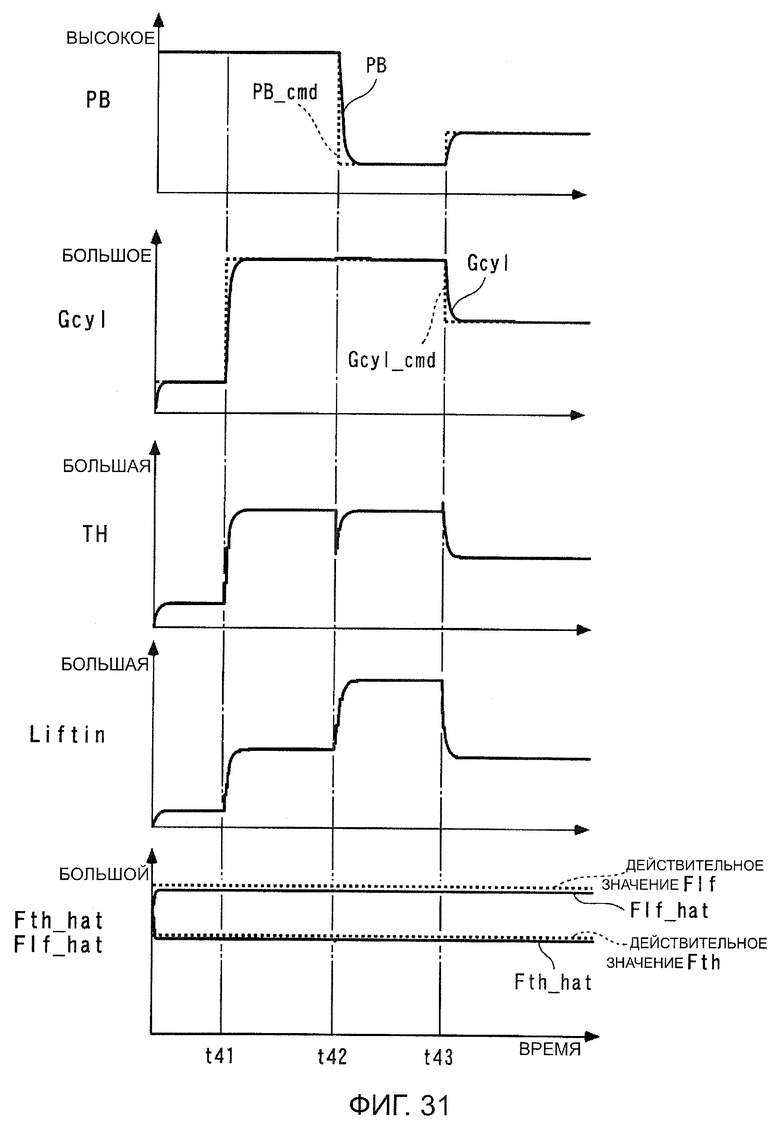
19. Система управления по п.11, отличающаяся тем, что двигатель включает в себя механизм дроссельной заслонки для изменения степени открытия дроссельной заслонки и механизм регулирования высоты подъема клапанов для изменения высоты подъема впускного клапана, управляющие величины представляют собой давление во впускном канале двигателя и количество всасываемого воздуха, входные сигналы управления представляют собой контрольное значение степени открытия для регулирования степени открытия дроссельной заслонки и контрольное значение высоты подъема для регулирования высоты подъема впускного клапана, параметр рабочего состояния представляет собой число оборотов вала двигателя, а указанное средство вычисления невзаимосвязанных входных сигналов вычисляет невзаимосвязанные входные сигналы в соответствии с числом оборотов вала двигателя и, по меньшей мере, с одним из: управляющих величин и входных сигналов управления.
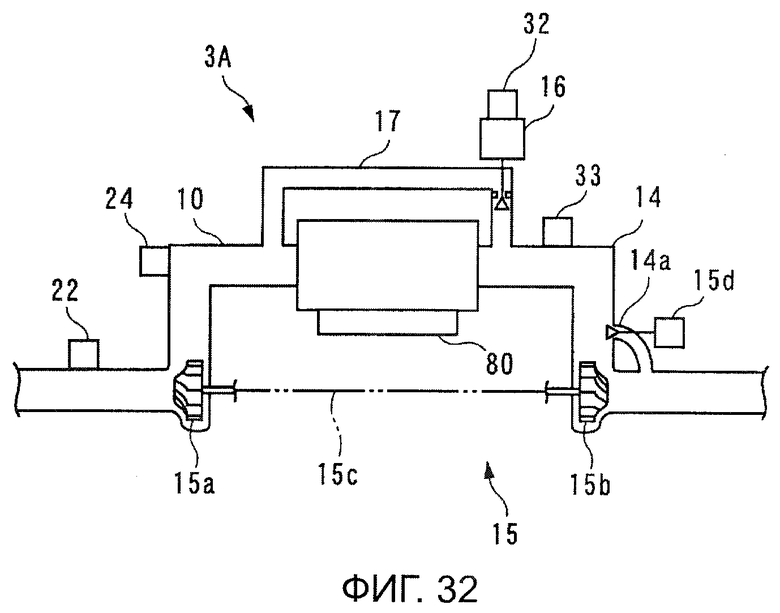
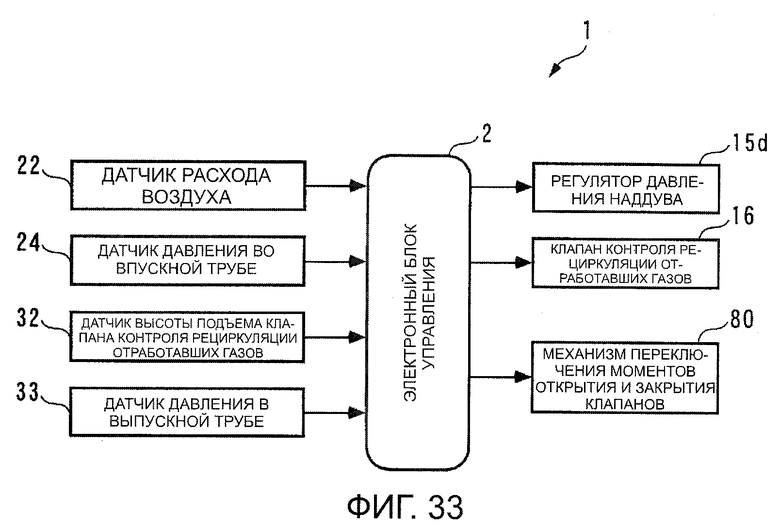
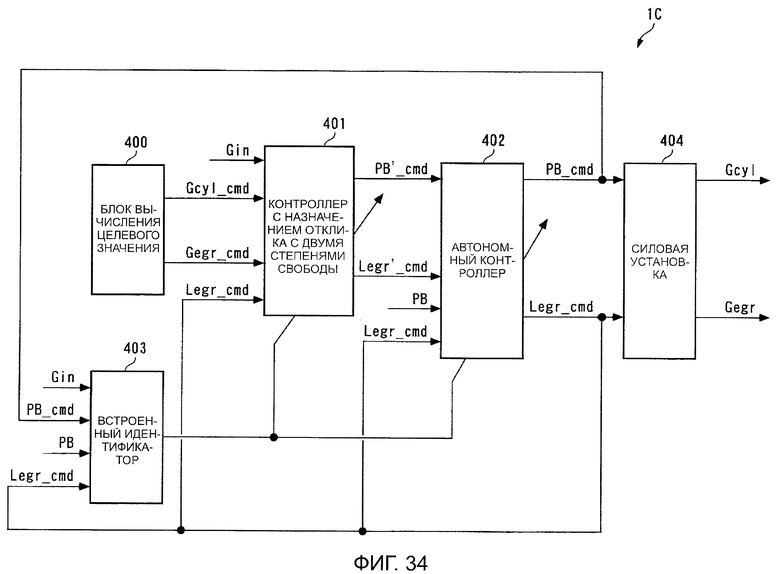
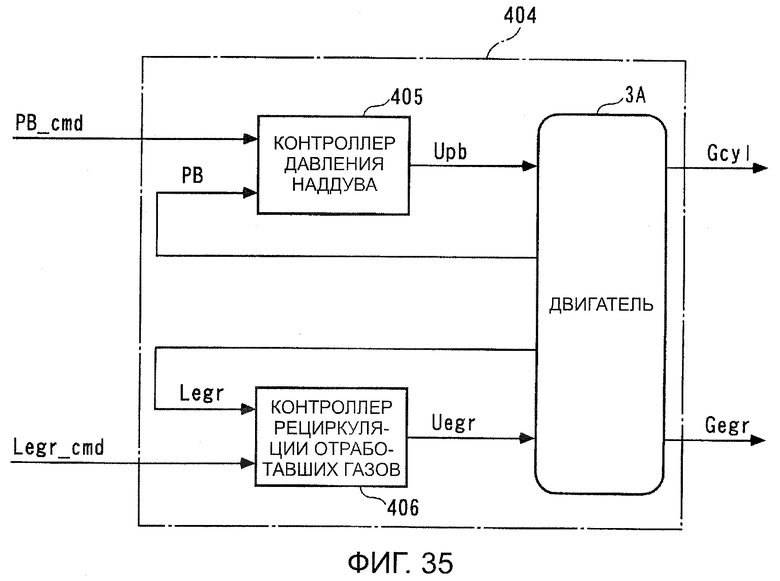
20. Система управления по п.10, отличающаяся тем, что двигатель включает в себя устройство рециркуляции отработавших газов для изменения количества рециркулируемых отработавших газов и нагнетатель для изменения давления наддува, управляющие величины представляют собой количество рециркулируемых отработавших газов и давление наддува, а входные сигналы управления представляют собой контрольное значение количества рециркулируемых отработавших газов для регулирования количества рециркулируемых отработавших газов с помощью устройства рециркуляции отработавших газов и контрольное значение давления наддува для регулирования давления наддува с помощью нагнетателя.
21. Система управления по п.11, отличающаяся тем, что двигатель включает в себя систему турбонагнетателя для изменения давления наддува, одна из управляющих величин представляет собой давление наддува, один из входных сигналов управления представляет собой контрольное значение давления наддува для регулирования давления наддува с помощью система турбонагнетателя, параметр рабочего состояния представляет собой давление в выпускном канале двигателя, а указанное средство вычисления невзаимосвязанных входных сигналов вычисляет контрольное значение давления наддува в качестве одного из невзаимосвязанных входных сигналов в соответствии с давлением в выпускном канале двигателя и, по меньшей мере, с одним из: управляющих величин и входных сигналов управления.
22. Система управления по п.11, отличающаяся тем, что двигатель включает в себя нагнетатель для изменения давления наддува и механизм регулирования момента открытия или закрытия клапана для изменения момента открытия или закрытия впускного клапана, одна из управляющих величин представляет собой давление наддува, один из входных сигналов управления представляет собой контрольное значение давления наддува для регулирования давления наддува с помощью нагнетателя, параметр рабочего состояния представляет собой момент открытия или закрытия впускного клапана, а указанное средство вычисления невзаимосвязанных входных сигналов вычисляет контрольное значение давления наддува в качестве одного из невзаимосвязанных входных сигналов в соответствии с моментом открытия или закрытия впускного клапана и, по меньшей мере, с одним из: управляющих величин и входных сигналов управления.
Приоритет по пунктам:
02.11.2004 - по пп.1-9;
05.11.2004 - по пп.10-22.
| JP 2000110656 A, 18.04.2000 | |||
| Устройство для удаления деталей из рабочей зоны пресса | 1982 |
|
SU1031602A1 |
| JP 5181504 A, 23.07.1993 | |||
| JP 2003195907 A, 11.07.2003 | |||
| JP 2003254100 A, 10.09.2003 | |||
| JP 200349673 A, 21.02.2003 | |||
| JP 11166434 A, 22.06.2002 | |||
| JP 200238982 A, 06.02.2002 | |||
| JP 11297012 A, 29.10.1999 | |||
| JP 2001227396 A, 24.08.2001 | |||
| Пила для поперечной распиловки дерева | 1930 |
|
SU24579A1 |
| RU 2070649 C1, 20.12.1996. | |||

