Настоящее изобретение относится к симулятору подъемного крана, строительной машины или вилочного погрузчика, включающему кабину управления, по меньшей мере, со средствами ввода команд управления, графический модуль симуляции для расчета виртуального отображения окружающей технику среды и/или видимых из кабины управления компонентов техники, например стрелы или грузового крюка, а также устройство визуализации для отображения рассчитанной виртуальной картинки, причем установлен модуль симуляции движения для определения движения и/или деформации машинных компонентов в зависимости от введенных команд управления, согласно которым графический модуль симуляции рассчитывает виртуальное изображение.
Подъемные краны и другая крупноразмерная техника, например буронабивные установки, карьерные комбайны или башенные экскаваторы, очень сложны в обслуживании, управлении и в обучении управлению, так что обычных учебных материалов, например фотографий, схем или фильмов не достаточно для возможности истинно наглядного отображения и обучения обслуживанию и управлению. При этом проблемой является не только большое количество функций управления и их взаимосвязь и связанный с этим довольно сложный комплекс средств ввода команд, например джойстики, ножные педали и переключатели управления, но и часто непривычная, характерная для машинного оборудования реакция машинной структуры на движения сервоприводов. Подъемные краны, например башенные поворотные краны или телескопические краны с подъемной стрелой, а также портовые и плавучие краны имеют длинные, узкие детали конструкции, например стрелу или башенную конструкцию, легко скручиваемые и относительно пластичные, за счет чего процессы ускорения или торможения сервоприводов вызывают структурные деформации и маятниковые эффекты, затрудняющие надежное управление и для опытных крановщиков после перехода на новый тип крана. Например, у поворотных башенных кранов в отличие от компактной техники часто происходит деформация башенной структуры и системы стрелы при поднятии груза или груз при повороте вокруг вертикальной оси начинает раскачиваться, а стрела совершает соответственно вращательные колебания. Подобное случается у башенных экскаваторов или буронабивных установок, что приводит крановщика или машиниста в замешательство при применении хорошо заученных в теории приемов управления и получении соответствующей реакции на них подъемного крана.
Для того, чтобы приблизить обучение и тренировку к реальности, уже было предложено применение крановых симуляторов, в которых тренирующийся крановщик может в приблизительно реалистичной кабине управления, соответствующей, например, кабине машиниста соответствующего типа подъемного крана, задавать команды управления посредством установленных средств ввода команд управления, например джойстиков, педалей, переключателей управления или сенсорных экранов, чтобы максимально реалистично почувствовать реакцию подъемного крана на эти команды управления. Для этого на устройстве индикации, включающем, как правило, несколько экранов, установленных в поле зрения кабины управления, отображают виртуальную картину окружающей кран среды, а также видимые из кабины управления компоненты подъемного крана, например стрелу и грузовой крюк, причем виртуальную картину окружающей кран среды и компонентов крана рассчитывают посредством графического модуля симулятора в зависимости от введенных команд управления.
Например, при повороте подъемного крана вокруг вертикальной оси или при вводе соответствующей команды управления графический модуль симуляции рассчитывает картину окружающей подъемный кран среды таким образом, чтобы она перемещалась на экране справа налево или наоборот и показанная на устройстве индикации виртуальная картина окружающей подъемный кран среды проходила мимо крановщика аналогично его «естественному» нахождению в кабине подъемного крана при повороте подъемного крана. Если вводится команда, например, на опускание грузового крюка и/или опускание стрелы, графический модуль симулятора изменяет виртуальную картину таким образом, чтобы крюк подъемного крана перемещался на устройстве индикации вниз или чтобы стрела опускалась. За счет такой реалистичной симуляции работы подъемного крана крановщик легче понимает реакцию подъемного крана на задействование средств ввода команд управления в кабине управления.
Такой крановый симулятор известен, например, из документа DE 10 2013 011 818 A1. Здесь в качестве кабины управления предложена кабина крановщика с соответствующими средствами ввода команд, причем окна или остекление симулирующей кабины крановщика заменены мониторами, на которых отображается виртуальная картина окружающей кран среды. При этом технический модуль симуляции воспроизводит динамику компонентов управления и приводов и учитывает ее при отображении на мониторе, отображая при этом в первую очередь движения установки компонентов подъемного крана при определенных движениях подъемного крана, например движении подъемного механизма.
Однако у этого известного кранового симулятора реалистичность виртуальной картины пока еще недостаточна. С одной стороны, комплексные процессы расчета, необходимые для определения динамики, вызывают задержку отклика или задержку виртуального отображения реакции подъемного крана по сравнению с реальной по времени реакцией подъемного крана, в частности, при необходимости одновременной виртуальной реализации нескольких установочных движений. С другой стороны, индивидуальное прочувствование реакций подъемного крана на определенные команды управления ограничено отображаемой на мониторах виртуальной картиной окружающей подъемный кран среды.
Исходя из этого, задачей настоящего изобретения является предложить усовершенствованный симулятор указанного типа, у которого отсутствуют недостатки существующего уровня техники, а последний предпочтительно усовершенствован. В частности, обеспечена реалистичная симуляция работы подъемного крана или техники, повышающая эффективность процесса тренировки и обеспечивающая лучшее понимание и возможность более легкого обучения реальной работе подъемного крана или техники.
Согласно изобретению указанную задачу решают посредством симулятора по пункту 1 формулы изобретения. Предметом зависимых пунктов формулы являются предпочтительные варианты осуществления изобретения.
Итак, предложена эмуляция данных с использованием аппаратных компонентов, выполняющих фактические установочные движения и воспроизводящие, тем самым, «реальные» установочные движения, чтобы обеспечить быстрое и с меньшим объемом вычислений предоставление данных движения, что обеспечивает возможность реалистичной симуляции в реальном или почти в реальном времени. При этом симулятор определяет необходимые для симуляции движения динамические параметры не полностью посредством симулирующей ЭВМ, а, по меньшей мере, частично путем эмуляции данных с использованием реально движущихся аппаратных компонентов, являющихся составной частью симулятора. Такой модуль эмуляции данных симулятора включает, в частности, компоненты сервоприводов и/или компоненты силовой электроники, фактически выполняющие установочные движения, воспроизводящие реальные движения подъемного крана или техники и обеспечивающие отличительные данные этих движений, например, в виде сигналов датчиков, отражающих установочные движения указанных приводных компонентов. Такая эмуляция данных обеспечивает возможность предоставления динамических и/или позиционных параметров, используемых далее для симуляции движений, значительно быстрее и с меньшим объемом вычислений, что обеспечивает реалистичную симуляцию в реальном или почти в реальном времени.
Чтобы обеспечить особенно быстрое определение движений машинных компонентов в зависимости от введенных в кабине управления команд управления, в другой вариант указанного модуля симуляции движений выполнен в виде гибридного устройства или гибридного модуля, включающего, с одной стороны, ЭВМ для симуляции динамических или позиционных параметров и, с другой стороны, по меньшей мере, подобные реальным сервоприводам подъемного крана или техники аппаратные компоненты, например приводные блоки, датчики вращения или инверторы, воспроизводящие установочные движения и определяющие динамические и/или позиционные параметры. В частности, применяют «реальные» аппаратные компоненты, устанавливаемые в симулированных кранах или в симулированной технике в качестве сервоприводов и/или деталей устройств управления.
В частности, модуль симуляции движения включает электрощит или, по меньшей мере, часть электрощита и его компонентов, которые устанавливают в симулированной технике как часть системы машинного управления. В частности, применяют силовую электронику и/или, по меньшей мере, часть силовой электроники, например инверторы, чтобы воспроизводить установочные движения, инициируемые вводом команд управления из кабины управления.
Кроме этого в усовершенствованном варианте осуществления применяют блоки сервоприводов, например, в виде сервомоторов, предназначенные для эмуляции движения сервомоторов симулированной техники или машинных компонентов. Предпочтительно для соответствующей оси сервомотора используют приводной блок, например, в виде блока сервопривода, управляемого, в частности через указанный инвертор, в соответствии с командой управления и состыкованного предпочтительно с дополнительным приводным блоком, например, в виде блока сервопривода, обеспечивающего противодействующий момент и/или противовес для симуляции реальных нагрузок, сопротивлений или инерции. Например, указанный второй приводной блок симулирует нагрузку, противодействующую подъемному механизму, или момент, противодействующий поворотному приводу.
Выполняемое в отдельных случаях с учетом приложенного противодействующего момента установочное движение указанного приводного блока фиксирует соответствующее детекторное устройство, причем соответствующий сигнал детекции отображает реально выполненное установочное движение и его используют в качестве сигнала датчика в дальнейшей симуляции, в частности, для определения указанным способом движений и/или положения и/или деформации структурных деталей и/или для виртуального отображения окружающей технику среды и/или видимых в ней машинных компонентов.
Предпочтительно применяют несколько таких приводных блоков или несколько таких пар приводных блоков, состоящих из привода и противопривода, а также из соответственно выделенного детекторного устройства, чтобы обеспечить возможность определения различных осей установочных движений симулированной работы техники.
Показания датчиков приводных блоков осей установочных движений задействованных и приводимых в зависимости от введенных в кабине управления команд управления в другом варианте симулируют или рассчитывают не посредством ЭВМ, а на основе аппаратных компонентов, максимально аналогичных реальным компонентам сервоприводов симулированной техники, эмулированных или воспроизведенных и выдаваемых в качестве реальных показаний датчиков.
Такая система эмуляции данных обеспечивает модулю симуляции движения намного более быстрое и с наименьшим объемом расчетов определение движений и/или положений машинных компонентов, что обеспечивает возможность добиться намного более быстрого и реалистичного виртуального отображения окружающей технику среды и/или машинных компонентов, а также связанных с ними установочных движений машинного стенда. Кроме этого обеспечена возможность индикации в кабине управления генерированных сигналов датчиков и/или их дальнейшего использования для мероприятий мониторинга, например для контроля грузоподъемности, или для ограничения рабочей сферы, которые в кабине управления индицируют и/или симулируют.
При использовании кранового симулятора для симуляции поворотного башенного крана и его работы указанные пары приводных блоков выполнения соответствующих установочных движений и обеспечения соответствующего противодействующего момента или противовеса соответствуют, в частности, поворотному механизму башни или, в случае верхнеповоротного башенного крана, поворотному механизму стрелы, подъемному механизму и ездовой грузовой тележке.
В другом варианте модуль симуляции движения выполнен таком образом, чтобы крановая или машинная структура была не неподвижной, так сказать бесконечно жесткой структурой, а эластично деформируемой и/или податливой и/или относительно пластичной структурой, допускающей, дополнительно к осям установочных движений машины, например оси наклона стрелы или оси вращения башни, возможность движений и/или изменения положения за счет деформирования деталей структуры. Учет подвижности машинной структуры вследствие структурных деформаций под воздействием груза или динамических нагрузок имеет значение в первую очередь для вытянутых, узких и заведомо, с учетом необходимой безопасности, подверженных статическим и динамическим пограничным условиям структур, например, кранов, так как дополнительно значительная доля движений приходится, например, на кабину крановщика, а деформирование структурных элементов изменяет положение грузового крюка. Чтобы в таких условиях обеспечить фактически реалистичное обучение или близкую к реальности тренировку, модуль симуляции движения учитывает такие деформации машинной структуры под воздействием статических и динамических нагрузок.
В частности, устройство идентификации для определения таких структурных деформаций включает ЭВМ для расчета этих структурных деформаций на основе занесенной в память модели расчетов в зависимости от введенных в кабине управления команд управления. Такая модель построена аналогично модели конечных элементов или является моделью конечных элементов, причем, однако, предпочтительно используют значительно более простую модель, чем модель конечных элементов, определяемую, например, империческим путем регистрации структурных деформаций от определенных команд управления и/или нагрузочных условий на реальном кране или реальной машине. Такая модель расчетов работает, например, с таблицами, в которых с определенными командами управления соотнесены определенные деформации, причем промежуточные параметры команд управления пересчитывает посредством устройства интерполяции в соответствующие деформации.
Применение такой упрощенной по сравнению с моделью конечных элементов модели расчетов обеспечивает возможность более быстрого идентифицирования структурных деформаций и, тем самым, более реалистичной симуляции машинных движений в реальном времени или в почти реальном времени с меньшим объемом расчетов.
Учитываемые модулем симуляции движения структурные деформации учитывают, с одной стороны, при подаче команд на приводное устройство для движения кабины управления, чтобы кабина управления имитировала движения кабины, вызванные структурными деформациями. Альтернативно или дополнительно учитывают при расчете виртуального отображения окружающей машинное оборудование среды и/или видимых в ней машинных компонентов, например для того, чтобы виртуально отображать прогибание стрелы или сдвигать горизонт вокруг крана чуть-чуть вверх для имитации легкого «кивка» кабины крановщика вперед, например, из-за деформации башенной конструкции.
В другом варианте предложено передавать реакции подъемного крана или техники на введенные в кабине управления команды, например, в виде движений и/или деформаций крана не только в виде виртуального отображения на устройстве индикации, а преобразовывать их в связанные с реакцией подъемного крана или техники фактические движения кабины управления, чтобы более реалистично передать пользователю симулятора динамические реакции техники и дать их почувствовать. Кабину управления, включающую, например, рабочее кресло, больше не устанавливают для этого статически неподвижно в помещении или на полу, а с возможностью совершения движений посредством приводного устройства.
В частности, кабину управления устанавливают подвижно с возможностью приведения ее в движение в зависимости от движений и/или деформаций машинных компонентов, определяемых модулем симуляции движения. Если модуль симуляции движения определяет отклонения машинных компонентов, например башни подъемного крана, за счет установочных движений или деформаций, которые в реальности сказались бы на положении кабины крановщика, приводное устройство получает от устройства управления приводом соответствующие команды для имитации движения кабины крановщика и соответствующего движения кабины управления. Например, при вводе в кабине управления команды на поворот подъемного крана вокруг вертикальной оси приводное устройство поворачивает кабину управления соответственно вокруг вертикальной оси. Если в кабине управления вводят, например, команду на подъем тяжелого груза, что в реальности приводит к легкому наклону вперед крановой структуры с небольшим скручиванием башни, то приводное устройство сдвигает кабину управления слегка вперед и/или слегка наклоняет ее вперед.
Чтобы обеспечить возможность максимально реалистичной имитации движения кабины управления в реальном рабочем режиме, приводное устройство выполняют с возможностью совершения движения вокруг нескольких осей и/или совершения вращательных и поступательных движений. В частности, кабину управления устанавливают с многоосевой подвижностью, а приводное устройство выполняют, по меньшей мере, с одной вертикальной осью вращения и, по меньшей мере, с одной горизонтальной осью качания и/или с двумя горизонтальными осями поступательного движения. Для обеспечения комплексной имитации движения кабины управления приводное устройство имеет три оси вращения или качания или выполнено с возможностью работы по трем осям вращения и трем осям поступательного движения, что обеспечивает кабине управления возможность поворота или наклона по всем трем пространственным осям и возможность поступательного движения по всем трем пространственным осям. В зависимости от симулируемого типа крана или техники возможно также более простое выполнение приводного устройства с меньшим количеством осей движения.
Для дальнейшего улучшения восприятия реальности пользователем симулятора в другом варианте предложено наложение на устройстве индикации на обеспеченное графическим модулем симуляции виртуальное отображение симуляции живых картин из кабины управления, показывающих, например, движения пользователя симулятором. В частности, на устройстве индикации одновременно и с наложением отображают, с одной стороны, генерированное графическим модулем симуляции виртуальное отображение окружающей технику среды и/или видимые в ней машинные компоненты, а, с другой стороны, снятое камерой в кабине управления реальной изображение. Такое наложение изображений симуляции и реальности дает пользователю симулятором особенно сильное ощущение реальности.
Предпочтительно в качестве устройства индикации при этом применяют носимое на голове устройство индикации, в частности, выполненное в виде очков виртуальной реальности и также камеру, предпочтительно носимую на голове, выполненную, например, в виде нашлемной камеры или встроенную в указанные очки виртуальной реальности, обеспечивающую указанное реальное изображение, отображаемое вместе с искусственно генерированным, виртуальным изображением на устройстве индикации, в частности в очках виртуальной реальности.
Указанная камера для обеспечения реального изображения является предпочтительно стереоскопической камерой, предоставляющей стереоизображение, совпадающее предпочтительно, по меньшей мере, с направлением взгляда пользователя и встраиваемое в соответствующее место на устройстве индикации, в частности в очки виртуальной реальности. Это обеспечивает особенно реалистичное пользовательское восприятие.
Принципиально существует возможность наложения симулированного изображения и указанного реального изображения на обычном мониторе, причем камера реальности установлена, например, на голове пользователя и обеспечивает изображение, по меньшей мере, в направлении взгляда пользователя, за счет чего на устройство индикации, например в виде нескольких мониторов, высвечивается реально заснятая рука пользователя или реальное изображение кабины управления. Однако наиболее реалистичную и, тем самым, более впечатляющую симуляцию обеспечивают очки виртуальной реальности.
Устройство наложения реального изображения камеры на виртуальное изображение графического модуля симуляции выполнено предпочтительно по принципу т.н. техники зеленого экрана, причем устройство наложения распознает в реальном изображении плоскости заданного цвета и заменяет их виртуальным изображением из модуля симуляции. Для этого в кабине управления выполнены предпочтительно стенки кабины крановщика, в которой зоны окон, например, окон реальной кабины крановщика, окрашены в основной цвет, максимально явно отличающийся от цвета остальных компонентов в зоне видимости камеры, например цвета оконных рамок, цвета средств ввода команд, цвета рабочей одежды и цвета кожи пользователя, чтобы реальное изображение в кабине управления отображало указанные окрашенные площади в определенной цветопередаче, а остальные площади изображения в другом цвете. Окрашенные в указанный основной цвет, например зеленый, площади или части площади реального изображения заменяют затем виртуальным изображением окружающей технику среды и/или видимых в ней машинных компонентов, чтобы наложенное изображение или наложенное отображение показывало, с одной стороны, кабину управления симулятора, ее компоненты и части тела пользователя, находящиеся в поле видимости камеры реальности, как реальную картинку и, с другой стороны, записанное камерой реальности изображение оконных зон стенок кабины крановщика с виртуальным отображением окружающей технику среды и видимых в ней машинных компонентов.
Указанное виртуальное отображение окружающей технику среды графический модуль симуляции предпочтительно изменяет и адаптирует для разных сценариев в зависимости от различных блоков данных, загружаемых через интерфейс в модуль симуляции. В частности, отображают проектные данные, например данные САПР, строящегося объекта и/или фактологию стройплощадки, которые заносят в память модуля симуляции через соответствующий интерфейс в зависимости от прогресса в процессе строительства фактическое состояние строящегося объекта или здания, а модуль симуляции использует их для генерирования виртуального отображения окружающей технику среды в соответствии с введенным в память блоком данных, в частности, в зависимости от введенных проектных данных и/или фактологии стройплощадки или приводит их во взаимное соответствие.
Привязка графического модуля симуляции к информации о стройплощадке или строящемся объекте обеспечивает возможность использования симулятора для тренировки работ, выполняемых на определенном стройобъекте или определенной стройплощадке. Если, например, необходимо выполнить сложное подъемное движение крана с проводкой груза между различными препятствиями и опусканием его в невидимой зоне стройобъекта, то это также можно многократно тренировать на симуляторе.
Названная информация о стройплощадке или стройобъекте является, как указано, данными САПР или другими геометрическим данными объекта или стройплощадки, причем в отдельных случаях используют и оцифрованные изображения фактического стройобъекта и прогресса в его возведении. Такие изображения вводят через указанный интерфейс САПР или соответствующий графический интерфейс в графический модуль симуляции, адаптирующий их затем к полученным данным САПР и/или к полученным графическим данным.
Моделирование запроектированной или уже существующей стройплощадки и соответствующее генерирование виртуального отображения окружающей технику среды посредством графического модуля симуляции является, в частности, важным вспомогательным средством для обеспечения на стройплощадке логистики и для возможности симулирования и тренировки критических процессов до начала строительства.
В модернизированным варианте изобретения предложена возможность использования симулятора в качестве устройства дистанционного управления «реальными» краном, строительной машиной или вилочным погрузчиком, причем между краном, стройтехникой и/или вилочным погрузчиком, с одной стороны, и симулятором, с другой стороны, устанавливают коммуникационную связь с возможностью передачи вводимых в кабине управления симулятора команд управления на устройство управления крана, стройтехники и/или вилочного погрузчика. «Реальный» кран или соответствующее дистанционно управляемое «реальное» оборудование выполняет введенные в кабине управления симулятора команды управления, одновременно генерированная симулятором виртуальная картина отображает окружающую подъемный кран среду, видимые в ней компоненты крана и выполнение подъемным краном команд управления. При этом существует возможность запоминания симулятором зафиксированных реальным краном динамических параметров и сигналов датчиков и использования их для генерирования виртуального отображения окружающей кран среды, чтобы обеспечить фактическое соответствие окружающей кран среды и положения крана изображению на устройстве индикации симулятора.
Независимо от указанной опции использования симулятора для дистанционного управления изобретение далее подробно раскрыто на примере предпочтительного варианта его осуществления с привлечением соответствующих чертежей, на которых представлено следующее:
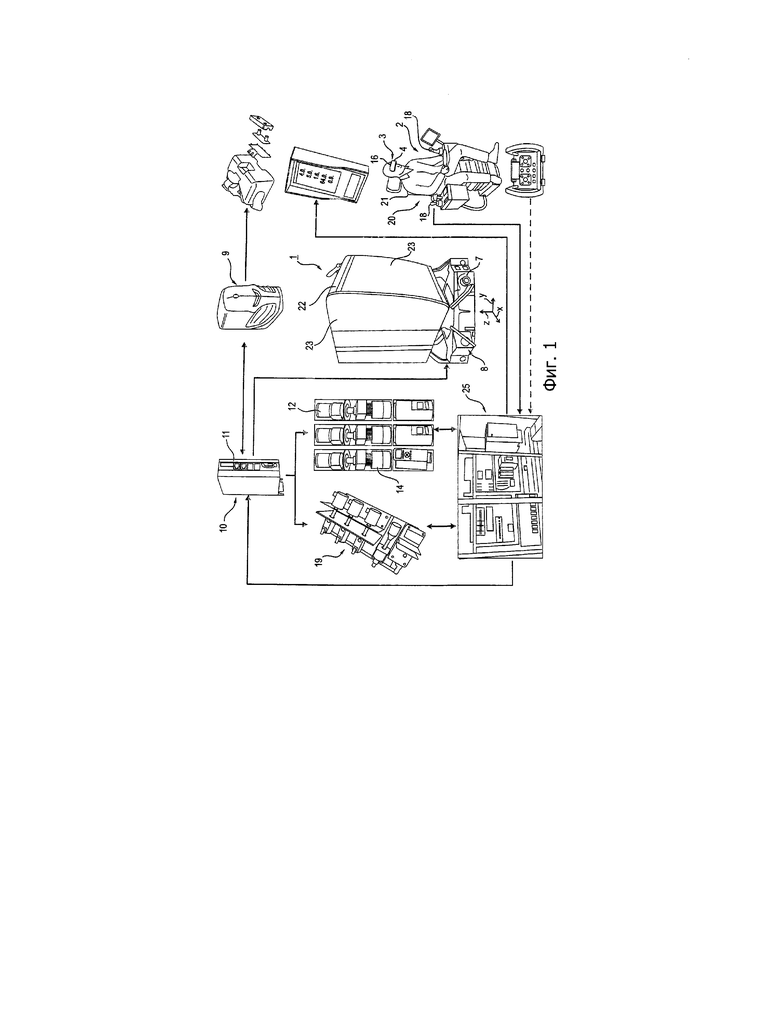
фиг.1: схема компонентов кранового симулятора согласно предпочтительному варианту осуществления изобретения,
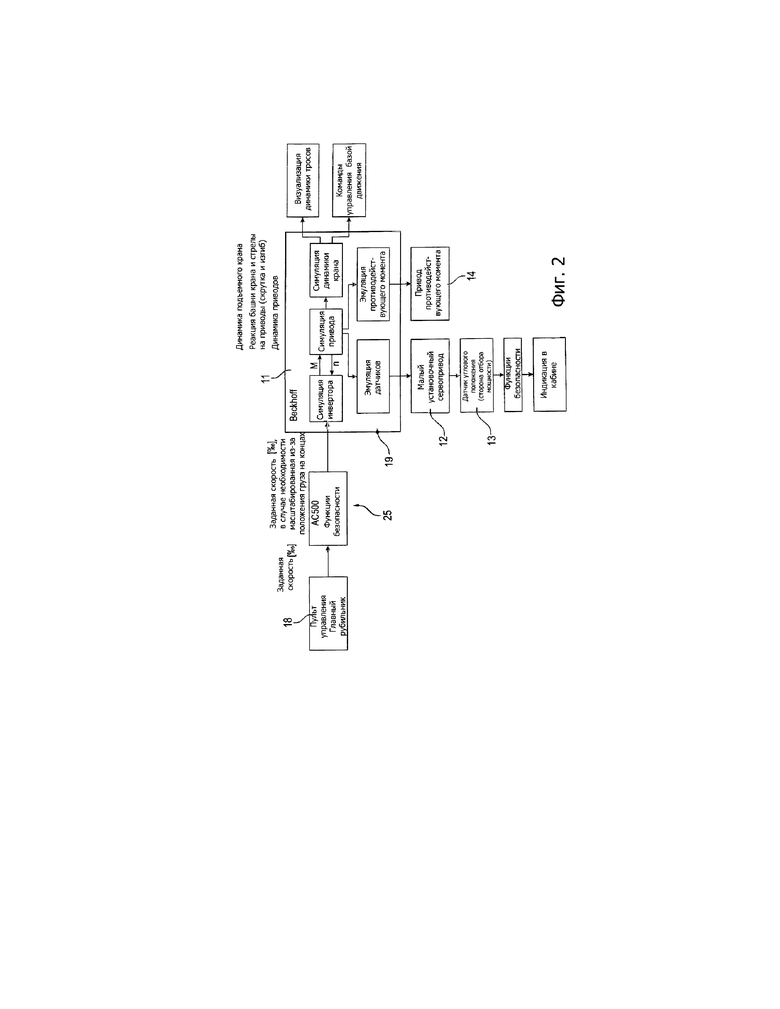
фиг.2: схема аппаратных компонентов для симуляции данных модуля симуляции движения,
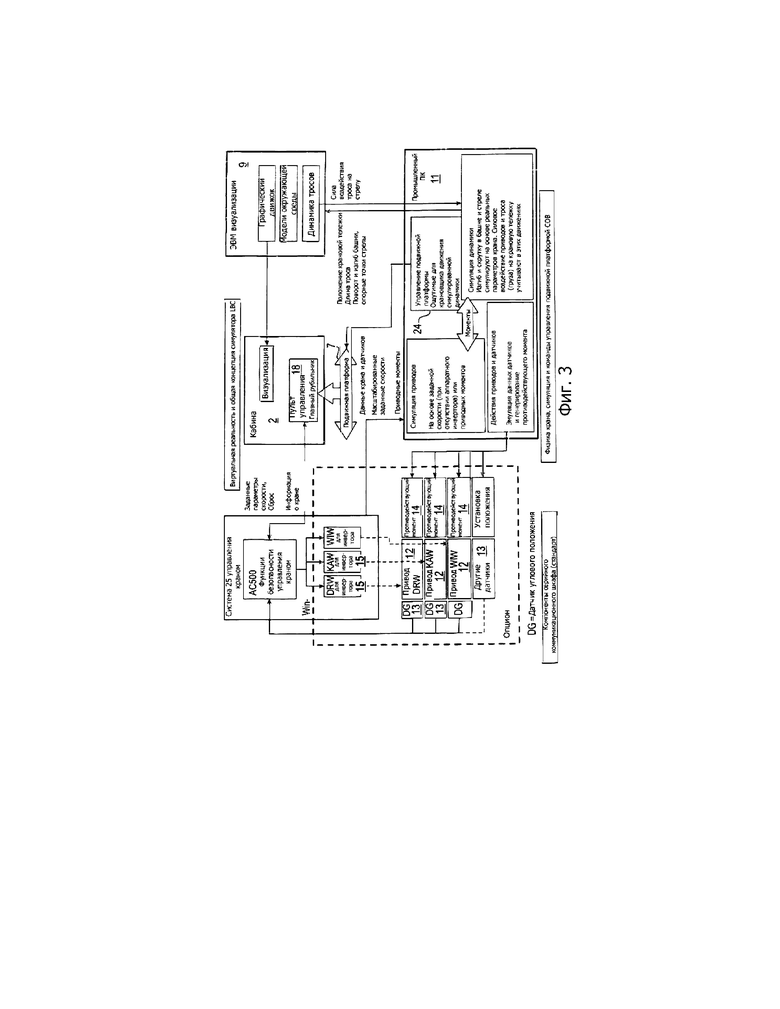
фиг.3: фрагментарная схема общей концепции симулятора по фигурам 1 и 2 и функциональной взаимосвязи его компонентов.
Как показано на фиг.1, симулятор 1 может быть выполнен в виде кранового симулятора, включающего кабину 2 управления в виде кабины крановщика, используемой, главным образом, например, на поворотном башенном, портовом или плавучем кране или на кране с телескопической стрелой.
Указанная кабина 2 управления включает при этом, главным образом, сиденье 21 оператора, например в виде кресла 20 оператора, вокруг которого установлены различные средства 18 ввода команд управления. Эти средства 18 ввода включают, например, джойстики, сенсорный экран, рычаг управления, клавиатуру и переключатели, ползунки и т.п.
Сиденье оператора окружено стенками 22 кабины машиниста, соответствующими корпусу кабины с оконными зонами 23, которые в реальной кабине крановщика застеклены, но в данном случае окрашены в определенный цвет, например, покрыты зеленой краской, для высвечивания на них по технике зеленого экрана виртуальной окружающей технику среды, как будет описано ниже.
Кабина 2 управления установлена на подвижной платформе 7 с возможностью движения по нескольким осям, в частности с возможностью качания или вращения вокруг всех трех пространственных осей x, y и z и с возможностью поступательного движения вдоль этих осей.
С осями движения x, y и z подвижной платформы 7 сопряжены исполнительные механизмы приводного устройства 8, выполненные, например, в виде электромоторов и/или гидроцилиндров и/или гидродвигателей для обеспечения возможности движения кабины 2 управления вокруг или вдоль указанных осей.
Приводным устройством 8 управляют при этом посредством устройства 24 управления движением, выполненным, например, в виде промышленного ПК.
Это устройство 24 управления движением является при этом частью модуля 10 симуляции движения, посредством которого определяют движения крана и/или положение крана и/или направленность компонентов крана, например стрелы или башни, а также скручивание структурных элементов, например стрелы или башни, в зависимости от соответственно введенных в кабине 2 управления команд управления.
Указанный модуль 10 симуляции движения определяет эффект воздействия введенных команд управления на симулированный подъемный кран, т.е. то, какие движения, положения, направленности и скручивания воспримет симулированный подъемный кран, и выдает соответствующие этим параметрам специфические сигналы движения.
Указанный модуль 10 симуляции движения при этом не определяет или не полностью определяет параметры движения путем расчета на основе модели расчетов, а использует реальные аппаратные компоненты в виде приводных и управляющих компонентов, предназначенных для выполнения реальных движений и имитирующих соответствующие аппаратные компоненты реального подъемного крана.
Как крупномасштабно показано на фиг.2 и фиг.3, модуль 10 симуляции движения включает, по меньшей мере, важнейшие компоненты системы 25 управления подъемным краном, аналогично выполненным в коммутационном шкафу подъемного крана. В частности, эта система 25 управления подъемным краном включает инверторы 15 различных приводов подъемного крана, например поворотного механизма, ездовой грузовой тележки и подъемного механизма. Эта система 25 управления краном в отдельных случаях включает дополнительные элементы управления и/или силовой электроники, в частности компоненты мониторинга груза, компоненты ограничения рабочей зоны и т.д.
Система 25 управления подъемным краном коммуникационно соединена с кабиной 2 управления и ее элементами 18 ввода и за счет этого может осуществлять дальнейшую обработку введенных команд управления, причем, в частности, инверторы 15 подают в зависимости от введенных команд управления команды управления на приводные блоки 12, выполненные, например, в виде сервоприводов. Таким образом, введенные в кабине 2 управления команды управления преобразуют в реальные движения или приводные моменты и усилия приводных блоков 12.
Указанные приводные блоки 12 выполнены с возможности состыковки с противодействующими приводными блоками 14, предназначенными для заведения на приводные блоки 12 двигательного противодействия, для имитации реального противодействия, например поднимаемого груза, силы ветра, инерции или динамических нагрузок. Этими противодействующими приводными блоками 14 управляют посредством указанного ранее промышленного ПК, реализующего также функцию устройства 24 управления движением. Команды управления для противодействующих приводных блоков 14 реализуют при этом на основе различных заданных условий или программ, например на основе заданных поднимаемых грузов, задаваемых программ ветровой нагрузки или на основе заданных функций или таблиц, например, динамических реакций при торможении ездовой грузовой тележки или при движениях поворота. Для этого в накопительный блок устройства управления противодействующими приводными блоками 14 заносят соответствующие модели, таблицы или функции
Как показано на фиг.2 и фиг.3, с приводными блоками 12 сопряжены устройства 13 фиксации, например в виде датчиков углового положения или в виде иных датчиков положения и/или движения, посредством которых обеспечивают сигналы движения или установочные сигналы, специфицирующие установочные движения приводных блоков 12. Таким образом, модуль 10 симуляции движения обеспечивает реальные сигналы датчиков в качестве параметров движения, которые, с одной стороны, индицируют в кабине 2 управления и, с другой стороны, используют для дальнейшего функционирования симуляции. В частности, в зависимости от указанных сигналов движения, обеспечиваемых датчиками углового положения, на основе модели расчетов определяют структурное скручивание, например изгиб башни и стрелы, а также аналогичные деформации и подают команды управления на приводное устройство 8 подвижной платформы 7 для движения кабины 2 управления, а также генерируют виртуальное отображение окружающей подъемный кран среды, каждый раз в зависимости от указанных, реально генерированных сигналов датчиков.
Как показано на фиг.3, модуль 10 симуляции движения включает ЭВМ 11 в виде указанного промышленного ПК, посредством которой в зависимости от введенных в кабине 2 управления команд управления и/или в зависимости от эмулированных данных, генерированных сигналами датчиков устройства 19 эмуляции данных или сопряженного с приводными блоками 12 устройства 13 фиксации, определяют структурное скручивание, в частности изгиб и скрутку башни подъемного крана и стрелы подъемного крана, причем в ЭВМ 11 применяют, как указано выше, модель расчетов, учитывающую жесткость структуры.
На основе этих эмулированных данных движения, а также определенных на их основе данных деформации устройство 24 управления движением подает команды управления на приводное устройство 8 подвижной платформы 7, чтобы обеспечить движение кабины 2 управления и имитировать реальные движения кабины крановщика при введении соответствующих команд управления на реальном кране.
С другой стороны, указанные данные движения и, в отдельных случаях, указанные данные деформации используют для учета реакции подъемного крана в виртуальном отображении, генерируемом модулем 9 симуляции и индицируемом на устройстве 3 индикации. Это виртуальное отображение показывает при этом, в частности, окружающую кран среду, а также видимые в ней компоненты подъемного крана, например стрелу подъемного крана и грузовой крюк, и соответствует, главным образом, картине, видимой крановщику из его кабины. Это виртуальное отображение соответствует по форме цифровому фото- или видеоизображению, например пиксельному многоцветному изображении. Альтернативно предусмотрено упрощенное графическое изображение, хотя более предпочтительно максимально реалистичное фото- или видеоизображение.
Предпочтительно при этом на указанное виртуальное отображение окружающей кран среды и видимых в ней компонентов подъемного крана наложено живое изображение реальных компонентов кабины 2 управления, в частности видимых от головы пользователя симулятором в направлении его взгляда деталей, например средств 18 ввода, кистей и предплечий пользователя и других компонентов в поле зрения.
Для этого используют предпочтительно камеру 16 в виде носимой на голове пользователя камеры с соответствующим крепежом и/или средствами удержания для закрепления на голове, например в виде нашлемной камеры. Если устройство 3 индикации выполнено предпочтительно в виде очков 4 виртуальной реальности, носимых пользователем, то камеру 16 встраивают в эти очки виртуальной реальности.
Предпочтительно камера 16 выполнена при этом в виде стереоскопической камеры для обеспечения стереоскопического изображения соответственно осям зрения обоих глаз пользователя.
Устройство 17 наложения генерированного графическим модулем 9 симуляции виртуального отображения окружающей кран среды и реальной картинки из камеры 16 включает, в частности, модуль 26 обработки цветного изображения, работающий по принципу техники т.н. зеленого экрана. В частности, этот модуль 26 обработки цветного изображения распознает в реальном изображении от камеры 16 зоны с особым, отличающимся от всех остальных площадей изображения цветом и замещает их виртуальным отображением из модуля 9 симуляции.
Для этого кабина 2 управления предпочтительно включает стенки 27 кабины крановщика с оконными зонами 23, закрашенными, например, аналогично окнам реальной кабины крановщика, основным цветом, максимально явно отличающимся от цвета остальных компонентов в поле зрения камеры, например от цвета оконных рамок, средств 18 ввода, от цвета рабочей одежды и цвета кожи пользователя, чтобы на записанной в кабине 2 управления реальной картинке указанные закрашенные зоны отображались с определенной цветопередачей, а все остальные площади или части площади изображения отображались в другом цвете. Окрашенные в указанный основной цвет, например зеленый, площади или части площади живой картинки замещают виртуальным отображением окружающей технику среды и/или видимых в ней машинных компонентов, генерированным графическим модулем 9 симуляции, чтобы наложенная картинка или наложенное изображение отображало, с одной стороны, реальное изображении кабины 2 управления симулятора с ее компонентами и находящимися в поле зрения камеры реальности частями тела пользователя и, с другой стороны, виртуальное отображение окружающей технику среды и видимых в ней машинных компонентов в записанных камерой 16 реальности оконных зонах 23 стенок 22 кабины крановщика.
Это виртуальное отображение окружающей технику среды графический модуль 9 симуляции предпочтительно изменяет и адаптирует его к различным, сценариям в зависимости от разных блоков данных, вводимых в модуль симуляции. В частности, в графический модуль 9 симуляции через соответствующий интерфейс данных, например интерфейс данных САПР или соответствующий графический интерфейс вводят проектные данные, например данные САПР, строящегося объекта и/или фактическое состояние стройплощадки и/или визуальные данные, отображающие фактическое состояние стройплощадки в зависимости от прогресса строительного процесса, а модуль 9 симуляции использует их для генерирования виртуального отображения или для адаптации виртуального отображения окружающей технику среды к введенным блокам данных, в частности, в зависимости от введенных проектных данных и/или от фактического состояния стройплощадки.
Предложен симулятор подъемного крана, строительной машины или вилочного погрузчика с кабиной управления, включающей средства (18) ввода команд управления, графический модуль (9) симуляции для расчета виртуального отображения окружающей строительную машину среды и/или видимых из кабины управления машинных компонентов, а также с устройством (3) индикации рассчитанного виртуального отображения. Модуль (10) симуляции движения предназначен для определения движений и/или деформации машинных компонентов, например стрелы крана или грузового крюка, в зависимости от введенных команд управления, а графический модуль (9) симуляции выполнен для расчета виртуального отображения в зависимости от определенных движений и/или деформации. Модуль (10) симуляции движений включает устройство (19) эмуляции данных для эмуляции данных движения симулированной техники. Устройство (19) эмуляции данных включает компонент сервопривода для выполнения установочного движения привода в зависимости от введенной в кабине управления команды управления. Графическое устройство симуляции выполнено для генерирования виртуального отображения с учетом выполненного установочного движения привода. Предложены также применение симулятора в качестве устройства дистанционного управления подъемным краном, строительной машиной или вилочным погрузчиком, а также система, содержащая симулятор, а также подъемный кран, строительную машину или вилочный погрузчик. Достигается реалистичная симуляция работы подъемного крана или техники, повышающая эффективность процесса тренировки и обеспечивающая лучшее понимание и возможность более легкого обучения реальной работе подъемного крана или техники. 3 н. и 16 з.п. ф-лы, 3 ил.
1. Симулятор подъемного крана, строительной машины или вилочного погрузчика с кабиной (2) управления, включающей средства (18) ввода команд управления, графический модуль (9) симуляции для расчета виртуального отображения окружающей строительную машину среды и/или видимых из кабины (2) управления машинных компонентов, а также с устройством (3) индикации рассчитанного виртуального отображения, причем модуль (10) симуляции движения предназначен для определения движений и/или деформации машинных компонентов, например стрелы крана или грузового крюка, в зависимости от введенных команд управления, а графический модуль (9) симуляции выполнен для расчета виртуального отображения в зависимости от определенных движений и/или деформации, отличающийся тем, что модуль (10) симуляции движений включает устройство (19) эмуляции данных для эмуляции данных движения симулированной техники, причем это устройство (19) эмуляции данных включает, по меньшей мере, компонент сервопривода для выполнения установочного движения привода в зависимости от введенной в кабине (2) управления команды управления, а графическое устройство симуляции выполнено для генерирования виртуального отображения с учетом выполненного установочного движения привода.
2. Симулятор по п. 1, в котором устройство (19) эмуляции данных включает, по меньшей мере, приводной блок (12) для выполнения установочного движения привода в зависимости от введенной в кабине (2) команды управления и устройство (13) фиксации движений приводного блока (12) и для генерирования сигнала движения и/или позиционного сигнала.
3. Симулятор по п. 2, в котором модуль (10) симуляции движений включает, по меньшей мере, дополнительный приводной блок (14) для обеспечения противодействующего момента и/или противовеса, выполненный с возможностью состыковки с указанным приводным модулем (12).
4. Симулятор по п. 2 или 3, в котором модуль (10) симуляции движений включает, по меньшей мере, силовой компонент управления, в частности, в виде инвертора (15) для подачи команд управления, по меньшей мере, на один приводной блок (12).
5. Симулятор по п. 4, в котором модуль (10) симуляции движений включает коммутационный шкаф и/или блок управления, соответствующий коммутационному шкафу симулированной техники или выполненный по его образцу.
6. Симулятор по любому из пп. 1-5, в котором кабина (2) управления установлена подвижно, а приводное устройство (8) предназначено для обеспечения движения кабины (2) управления в зависимости от движений и/или деформаций, определенных модулем (10) симуляции движений.
7. Симулятор по п. 6, в котором кабина (2) управления установлена с многоосевой подвижностью, а приводное устройство (8) имеет несколько осей (x, y, z) движения, включающих предпочтительно несколько осей поворотного движения и/или несколько осей поступательного движения, которые задействованы в зависимости от введенных в кабине (2) управления команд управления.
8. Симулятор по п. 6 или 7, в котором кабина (2) управления установлена на подвижной платформе (7), в которую встроено приводное устройство (8).
9. Симулятор по любому из пп. 1-8, причем модуль (10) симуляции движений включает устройство идентификации для определения деформаций структурных элементов симулированной техники в зависимости от введенных в кабине (2) управления команд управления, причем это устройство идентификации включает ЭВМ (11) для расчета деформаций на основе записанной в память модели деформирования структурных элементов.
10. Симулятор по п. 9, в котором графический модуль (9) симуляции предназначен для генерирования виртуального отображения в зависимости от рассчитанных деформаций структурных элементов и/или установлено устройство управления для подачи команд на приводное устройство (8) в зависимости от рассчитанных деформаций структурных элементов.
11. Симулятор по любому из пп. 1-10, в котором установлена, по меньшей мере, камера (16) для фиксирования реального изображения кабины (2) управления и, по меньшей мере, с устройством индикации (3) сопряжено устройство (17) наложения, предназначенное для наложения в устройстве (3) индикации генерированного графическим модулем (9) симуляции виртуального отображения на предоставленную камерой (16) живую картинку.
12. Симулятор по п. 11, в котором камера (16) имеет головной держатель для ношения камеры на голове пользователя симулятором и/или выполнена в виде головной и/или нашлемной камеры.
13. Симулятор по п. 11 или 12, в котором камера (16) выполнена в виде стереоскопической камеры для обеспечения стереоскопического изображения, по меньшей мере, в основном, в направлении взгляда пользователя симулятором.
14. Симулятор по любому из пп. 1-13, в котором, по меньшей мере, устройство (3) индикации имеет головной держатель для ношения на голове пользователя симулятором и/или выполнено в виде очков виртуальной реальности со встроенной камерой (16).
15. Симулятор по любому из пп. 1-14, в котором кабина (2) управления включает стенки кабины крановщика с выполненными в них обзорными окнами, причем графический модуль (9) симуляции и/или устройство (17) наложения имеет цветочувствительный блок наложения для наложения виртуального отображения на окрашенные в указанный определенный цвет площади изображения предоставленной камерой (16) живой картинки.
16. Симулятор по любому из пп. 1-15, причем графический модуль (9) симуляции включает интерфейс данных для введения данных о строящемся объекте и/или о стройплощадке и устройство обработки изображений для генерирования и/или адаптации виртуального отображения окружающей технику среды в зависимости от введенных данных о строящемся объекте и/или о стройплощадке.
17. Симулятор по п. 16, причем указанный интерфейс данных является интерфейсом данных САПР, а устройство обработки изображений предназначено для генерирования или адаптации виртуального отображения окружающей технику среды в зависимости от введенных через САПР-интерфейс данных САПР, и/или является графическим интерфейсом, а устройство обработки изображений предназначено для генерирования или адаптации виртуального отображения окружающей технику среды в зависимости от введенных через графический интерфейс цифровых графических данных.
18. Применение симулятора по любому из пп. 1-17 в качестве устройства дистанционного управления подъемным краном, строительной машиной или вилочным погрузчиком.
19. Система, содержащая симулятор (1), выполненный по любому из пп. 1-17, а также подъемный кран, строительную машину или вилочный погрузчик, причем между подъемным краном, строительной машиной и/или вилочным погрузчиком, с одной стороны, и симулятором (1), с другой стороны, выполнена коммуникационная связь, обеспечивающая возможность передачи введенных в кабине (2) управления команд управления на устройство управления подъемного крана, строительной машины и/или вилочного погрузчика.
| СПОСОБ И СИСТЕМА ДЛЯ РАБОЧЕЙ МАШИНЫ СО СТРЕЛОЙ | 2009 |
|
RU2524737C2 |
| DE 102013011818 A1, 15.01.2015 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |

