Изобретение относится к мобильному устройству для определения параметров состояния и рабочих параметров вибрационных машин в соответствии с определением в п. 1 формулы изобретения, а также к вибрационной машине, оснащенной таким устройством по п. 13 формулы изобретения, и к способу определения рабочих параметров и параметров состояния вибрационных машин по п. 14 формулы изобретения.
Вибрационные машины вышеупомянутого типа известны, например, как вибрационные грохоты, вибрационные конвейеры, вибрационные сушилки и т.п., а также футеровочно-возбуждаемые грохоты, такие как перекидные поточные грохоты. Их используют, в частности, для непрерывной подготовки сыпучих материалов, и они характеризуются режимом работы, в котором конструктивные элементы, необходимые для выполнения функции, подвергаются заданным вибрациям, причем требуемый технологический результат достигается за счет их воздействия на сыпучий материал. Например, обкладки вибрационных грохотов приводят в непрерывное колебательное движение, что индуцирует и усиливает операцию просеивания. В перекидных грохотах операцию просеивания осуществляют путем попеременного сжатия и натяжения обкладки грохота. Применяя направленное колебательное движение, можно транспортировать сыпучие грузы с одновременным просеиванием или без него. Область применения вибрационных машин простирается от просеивания сыпучих зернистых материалов до транспортировки и просеивания руд, угля, благородных металлов и неблагородных металлов. Последние требуют соответственно больших и надежных конструкций машин.
Благодаря своему динамическому режиму работы вибрационные машины подвергаются непрерывной вибрационной нагрузке, которая идет рука об руку с повышенным износом и соответственно сокращает сроки службы деталей машин и узлов машин. При этом особенно страдают компоненты, которые вступают в непосредственный контакт с сыпучим материалом, а также их несущие и приводные компоненты. Для предотвращения полного выхода из строя вибрационной машины в результате отказа компонентов и, следовательно, прерывания производственного процесса, вибрационные машины тщательно контролируют во время работы. Задача состоит в том, чтобы обнаружить и оценить параметры состояния и рабочие параметры вибрационной машины в заранее определенные промежутки времени, чтобы иметь возможность обнаружить на ранней стадии существующий отказ компонентов и/или деталей и, при необходимости, своевременно принять ответные меры.
Проверенное устройство в этой связи известно из документа WO 2015/117750 A1. В нем описана вибрационная машина, содержащая гибко поддерживаемое вибрирующее тело и возбудитель, действующий на вибрирующее тело. Для отслеживания вибрационного поведения вибрационной машины предусмотрено устройство, имеющее инерционный датчик для определения ускорения возбудителя, как в пространственных осях, так и вокруг пространственных осей. Предполагая, что вибрационную машину следует рассматривать как твердое тело, выводы, касающиеся частоты вибрации, амплитуды вибрации и формы вибрации, получают из измеренных значений с помощью вычислительного блока, на основе которых делают заключение о состоянии вибрационной машины.
На этом фоне цель изобретения заключается в получении предпочтительно дополнительной индикации состояния вибрационной машины путем дифференцированного детектирования вибрационного поведения вибрационных машин. Другая цель заключается в упрощении и сокращении времени проведения измерений.
Эти цели достигают посредством устройства, обладающего признаками п. 1 формулы изобретения, вибрационной машины, обладающей признаками п. 13, и способа, обладающего признаками п. 14 формулы изобретения.
Выгодные конкретные варианты осуществления получают из формулы изобретения.
В отличие от известного уровня техники, который основан на поведении твердого тела вибрирующей машины при анализе вибрационного поведения, основная идея изобретения заключается в локально дифференцированном детектировании вибрационного поведения во всех соответствующих областях всей вибрационной машины. Для этого, по меньшей мере четыре блока датчиков, образующих сеть датчиков, закреплены в соответствующих местах на вибрационной машине и соединены с вычислительным блоком по радио. Во время выполнения операции измерения параметры состояния и рабочие параметры измеряют в каждом блоке датчиков относительно локальной системы координат X1, Y1, Z1, определяемой конкретным блоком датчиков или его датчиками ускорения, передают в вычислительный блок и преобразуют там в однородную систему координат более высокого уровня X0, Y0, Z0. Информацию об ориентации отдельных блоков датчиков в пространстве, необходимую для преобразования, получают из положения вибрирующей плоскости, которое устанавливают во время работы машины, и из измерений наклона гравитационных датчиков блоков датчиков. Затем выполняют оценку на основе преобразованных данных измерений, из которых выводят параметры состояния и рабочие параметры, такие как частота вибрации, амплитуда вибрации и угол вибрации. Это, во-первых, дает преимущество в том, что блоки датчиков могут быть расположены на вибрационной машине в любой ориентации в пространстве и в любом положении относительно вибрационной машины во время установки мобильного устройства в соответствии с изобретением. Поэтому поверхности на вибрационной машине, пригодные для крепления блоков датчиков, могут быть выбраны с максимально возможной свободой, и нет необходимости ориентировать блоки датчиков в заданном положении во время сборки. Это значительно упрощает монтаж, а также сокращает время монтажа. Это преимущество имеет место, в частности, в больших вибрационных машинах, которые используют, например, в тяжелой промышленности, так как там установлено большое количество блоков датчиков, распределенных по всей вибрационной машине, и в мобильных устройствах, которые необходимо перемещать от одной вибрационной машины к другой каждый раз при их использовании, что влечет за собой соответствующую сложность монтажа.
В связи с этим оказалось особенно выгодным оборудовать блоки датчиков магнитными зажимами в качестве крепежных средств, что облегчает их легкое и быстрое крепление путем размещения их на вибрационной машине без каких-либо дополнительных мер.
За счет исключения необходимости ориентировать блоки датчиков в пространстве в заданном положении для процесса измерения становится очевидным еще одно преимущество. Установка блоков датчиков с недостаточной тщательностью оказалась скрытой причиной погрешностей измерений, поскольку неадекватно ориентированные блоки датчиков ухудшают качество результатов измерений. Этот источник риска устраняют с помощью устройства в соответствии с изобретением, так что результаты измерений, полученные с помощью устройства в соответствии с изобретением, отличаются одинаково высокой точностью.
Поскольку измеренные значения для конкретных местоположений определяют с помощью каждого блока датчиков, то с помощью устройства в соответствии с изобретением не только определяют вибрационное поведение вибрационной машины в целом, но и дифференцируют в зависимости от конкретного места установки блоков датчиков. Выбирая места установки соответствующим образом, можно определить специфическое вибрационное поведение отдельных компонентов машины, таких как обкладка грохота, рама грохота, возбудитель, изоляционная рама и т.п.
В связи с этим подходящие места установки предпочтительно представляют собой четыре угла рамы грохота, в каждом из которых может быть размещен один датчик. Если используется больше блоков датчиков, то два датчика могут быть дополнительно расположены, например, в центре продольных сторон рамы грохота, и/или два блока датчиков могут быть расположены в торцевых областях поперечины возбудителя. Однако в принципе оператор устройства в соответствии с изобретением имеет возможность свободно выбирать количество и расположение блоков датчиков.
В одном особенно предпочтительном конкретном варианте осуществления изобретения предусмотрено синхронное по времени измерение во всех блоках датчиков. Для синхронизации измерительных операций генерируют стартовые сигналы и передают их одновременно на все блоки датчиков. Это предпочтительно происходит в пределах временного окна 0,1 мс, наиболее предпочтительно в пределах временного окна 0,05 мс. В одном предпочтительном уточнении изобретения стартовый сигнал для этого передают по радио от модуля связи/шлюза, подключенного между вычислительным блоком и блоками датчиков, предпочтительно в соответствии со стандартом IEEE 802.15.4.
Синхронизация процессов измерения открывает возможность сравнивать во время оценки измеренные значения локально разнесенных блоков датчиков с учетом фазовой корреляции. Таким образом определяют не только, насколько совпадают частота вибрации, амплитуда вибрации и угол вибрации, но также определяют, имеет ли место фазовый сдвиг вибрации левой и/или передней части вибрационной машины по отношению к правой и/или задней части. В результате получают индикацию о собственных деформациях вибрационной машины и о возникновении собственных колебаний в процессе работы машины.
В соответствии с одним предпочтительным конкретным вариантом осуществления изобретения, данные измерений, полученные в отдельных блоках датчиков, временно сохраняют в запоминающих устройствах, расположенных в них, и передают в вычислительный блок в конце выполнения измерения. Преимущество этого заключается в том, что данные измерений могут быть проверены на достоверность и полноту до их передачи, т.е. в вычислительный блок попадают только записи данных, признанные корректными.
Для обмена данными между вычислительным блоком и сетью датчиков предпочтительным конкретным вариантом осуществления изобретения является маршрутизатор, который устанавливает совместимость между сетью датчиков и вычислительным блоком. Таким образом, в качестве вычислительного блока можно использовать коммерческие компьютеры, ноутбуки или планшетные компьютеры, которые осуществляют связь в соответствии со стандартом IEEE 802.11. В случае если блоки датчиков используют стандарт передачи данных, отличный от стандарта, используемого вычислительным блоком, в коммуникационную цепочку вставляют преобразователь протокола. Маршрутизатор и/или преобразователь протокола может быть интегрирован в модуль связи/шлюз, что дополнительно повышает компактность и мобильность устройства.
В одном специфическом варианте осуществления изобретения преобразованные и/или оцененные данные могут быть выведены буквенно-цифровым способом в виде вычисленных значений. Однако, в отличие от этого, предпочтительна визуализация, например, на каркасной модели вибрационной машины, которую выводят на монитор или дисплей вычислительного блока. Таким образом, отклоняющееся вибрационное поведение вибрационной машины может быть немедленно обнаружено, локализовано и проанализировано.
Изобретение более подробно объясняется ниже на основе одного примера осуществления, проиллюстрированного на чертежах, при этом становятся очевидными дополнительные признаки и преимущества изобретения. Пример осуществления относится к вибрационной машине в виде вибрационного грохота, однако не ограничен им. Последующие варианты осуществления применяют соответственно к другим вибрационным машинам, таким как вибрационные конвейеры, вибрационные сушилки, перекидные поточные грохоты и т.п. На чертежах:
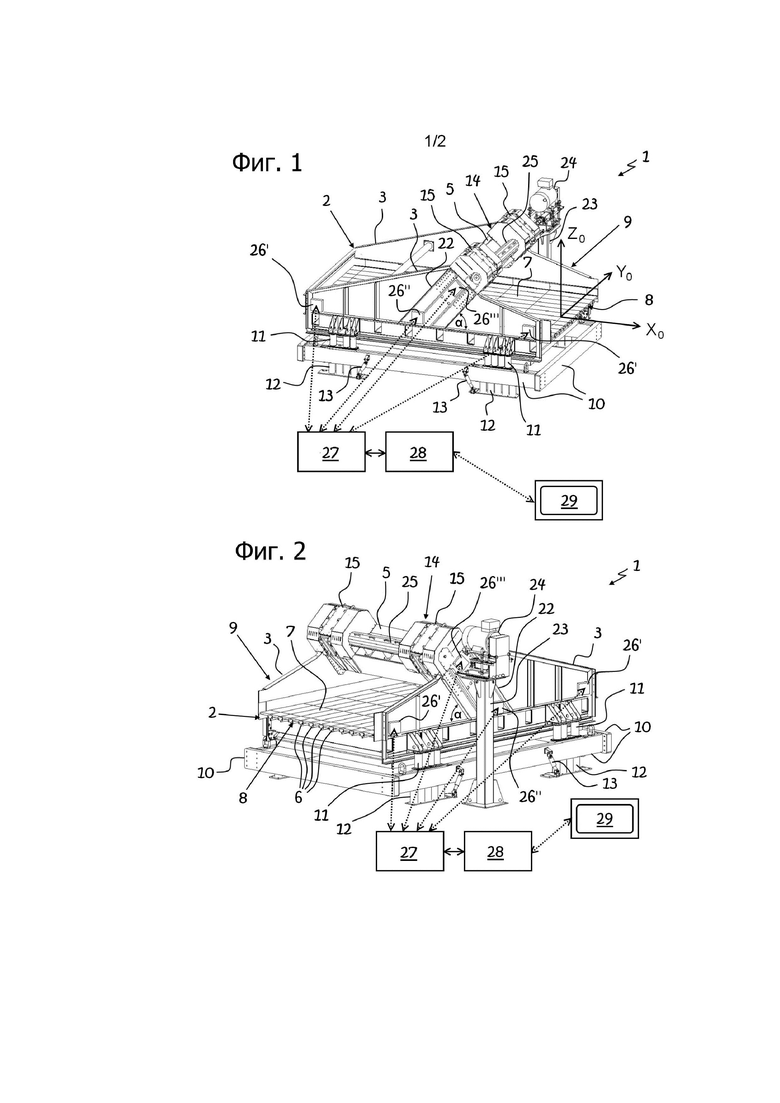
на фиг. 1 приведена косая проекция вибрационной машины в соответствии с изобретением на первую ее продольную сторону;
на фиг. 2 показана косая проекция вибрационной машины, изображенной на фиг. 1, на ее вторую продольную сторону, противоположную первой стороне;
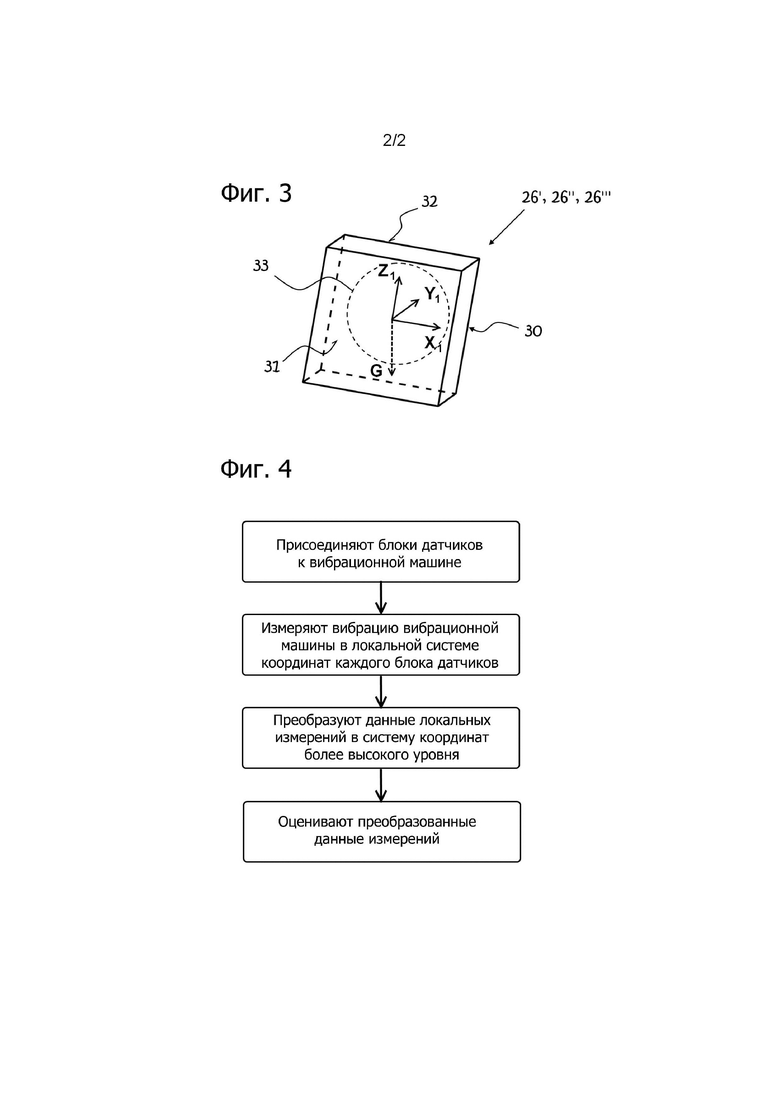
на фиг. 3 приведена косая проекция блока датчиков устройства, изображенного на фиг. 1 и 2; и
на фиг. 4 приведена блок-схема способа в соответствии с изобретением для определения рабочих параметров и параметров состояния вибрационной машины, показанной на фиг. 1 и 2.
На фиг. 1 и 2 показана вибрационная машина 1 в соответствии с изобретением в виде вибрационного грохота. Существенным элементом вибрационной машины 1 является рама 2 грохота, включающая в себя две приблизительно треугольные боковые пластины 3, расположенные параллельно на расстоянии друг от друга, которые жестко соединены между собой вдоль своего основания через ряд поперечин 4 и через поперечину 5 возбудителя в верхней области напротив основания. Поперечины 4 образуют своей верхней стороной опору для деки 8 грохота, собранной из большого количества продольных направляющих 6 с размещенной на них обкладкой 7 грохота. Рама 2 грохота с декой 8 грохота дает жесткий ситовой корпус 9, который принимает сыпучий материал и подвергает его процессу разделения во время работы, одновременно линейно перемещая его.
Для установки ситового корпуса 9 виброгасящим способом на некотором расстоянии под рамой 2 грохота предусмотрена прямоугольная изолирующая рама 10, на которую опирается рама 2 грохота посредством нескольких групп первых пружинных элементов 11. Изолирующая рама 10, в свою очередь, жестко закреплена на подложке с помощью вторых пружинных элементов 12 и виброгасителей 13.
Для создания вибрационного движения ситового корпуса 9 вибрационная машина 1 оснащена возбудителем 14, который установлен с возможностью вращения на подшипниках 15 на концах поперечины возбудителя 5. Возбудитель 1 [14] имеет вал, ось которого параллельна поперечине 5 возбудителя, в области подшипника 15, зубчатое колесо и неуравновешенную массу, лежащую на выступах с обеих его сторон, а также соответствующий второй вал с зубчатым колесом и неуравновешенной массой. Два зубчатых колеса находятся в рабочем зацеплении друг с другом и, таким образом, обеспечивают противоположное вращение двух валов с одинаковой скоростью вращения. Неуравновешенные массы опираются на валы таким образом, что при взаимодействии они генерируют вибрационный импульс, вектор которого последовательно охватывает угол α относительно горизонтальной плоскости, при этом ситовой корпус 9 совершает линейное колебательное движение под углом α относительно горизонтальной плоскости. Для придания жесткости ситовому корпусу 9 армирующие профили 22, расположенные в направлении колебательного движения, проходят между поперечиной возбудителя 5 и основанием боковых пластин 3.
Со стороны ситового корпуса 9 и изолирующей рамы 10 выполнен привод вращения 24, который расположен на колонне 23 и неподвижно упирается с возможностью вращения в первый вал через карданный вал. Промежуточный вал 25, в свою очередь, соединяет два первых вала возбудителя 5.
В процессе работы вибрационная машина 1 подвергается непрерывной динамической нагрузке, что делает тщательный контроль параметров состояния и рабочих параметров необходимым для минимизации риска отказа. Мобильное устройство, пригодное для этой цели, содержит по меньшей мере четыре блока 26', 26", 26"' датчиков, по меньшей мере восемь в настоящем примере осуществления, модуль связи/шлюз 27, маршрутизатор 28, а также вычислительный блок 29, которые обмениваются данными друг с другом. Для транспортировки к месту использования эти компоненты могут быть размещены вместе в комплекте инструментов, который может содержать дополнительные периферийные устройства, такие как зарядная станция, аккумуляторная батарея, блок питания и тому подобное.
Один из блоков 26', 26", 26"' датчиков представлен на фиг. 3 в упрощенном виде. Блок 26', 26", 26"' датчиков имеет корпус 30 в форме куба с передней стороной 31 и задней стороной 32. На задней стороне 32 расположен магнит 33, предназначенный для крепления блока 26 датчиков к вибрационной машине 1 с возможностью отсоединения. На корпусе 30 также предусмотрены зарядные контакты, несколько светодиодов для отображения состояния, а также переключатель включения/выключения – которые не показаны.
Внутри корпуса 30 расположено три датчика ускорения, которые выполнены в виде микроэлектромеханических компонентов (МЭМС). Датчики ускорения расположены перпендикулярно друг к другу, так что их измерительные оси задают локальную систему координат с пространственными осями X1, Y1 и Z1. По меньшей мере один из датчиков ускорения одновременно обладает функциональностью датчика силы тяжести для обнаружения вектора силы тяжести G в локальной системе координат X1, Y1 и Z1. Дополнительными функциональными блоками блока 26', 26", 26"' датчиков являются память для временного хранения измерительных данных от датчиков ускорения, радиомодуль для обмена данными, по меньшей мере одна интегральная схема для локальной обработки данных, а также модуль хранения электрической энергии.
Как видно из фиг. 1 и 2, в каждой из угловых областей рамы 2 грохота расположен блок 26' датчиков. В данном случае он находится с внешней стороны торцов боковых пластин 3 непосредственно над расположенными там поперечинами 4. Кроме того, еще один блок 26" датчиков расположен примерно посередине между торцами рамы 2 грохота, также непосредственно над поперечинами 4 с внешней стороны боковых пластин 3. Кроме того, в каждом случае блок 26"' датчиков размещен на продолжении поперечины 5 возбудителя с внешней стороны боковых пластин 3.
Разъемное крепление блока 26', 26", 26"' датчиков к вибрационной машине 1 осуществляют с помощью магнитов 33 на задней стороне блоков 26', 26", 26"' датчиков. При этом нет необходимости учитывать особую ориентацию блоков 26', 26", 26"' датчиков в пространстве, что упрощает монтаж и сокращает время монтажа.
Модуль связи/ шлюз 27 управляет потоком данных от блоков 26', 26", 26"' датчиков и к ним и выполняет функцию контроллера/маршрутизатора. Радиосвязь между модулем связи/шлюзом 27 и блоком 26 датчиков осуществляют в соответствии со стандартом IEEE 802.15.4 в диапазоне частот от 868 МГц до 870 МГц и/или от 2,4 ГГц до 2,483 ГГц (=ZigBee).
Передачу данных в вычислительный блок 29 осуществляют через маршрутизатор 28, который взаимодействует с вычислительным блоком 29 в соответствии со стандартом IEEE 802.11 в диапазоне частот 2,4 ГГц и/или 5 ГГц (=WLAN).
Для достижения совместимости между двумя стандартами модуль связи/шлюз 27 дополнительно обладает функциональностью преобразователя протоколов; таким образом, в каждом случае модуль связи/шлюз 27 преобразует входящие данные в другой стандарт. Модуль связи/шлюз 27 и маршрутизатор 28 соединены между собой кабелем передачи данных для обмена данными.
Вычислительный блок 29 по существу состоит из мобильной электронной системы обработки данных, например ноутбука или планшетного компьютера. Вычислительный блок 29 включает в себя модуль ввода данных, например для ввода команд управления, модуль памяти, в котором хранят опорные данные, предельные значения, данные измерений от блоков датчиков и т.п., вычислительный модуль для запроса, обработки и вывода данных и модуль вывода данных, например, дисплей для визуализации подготовленных данных или интерфейс для пересылки подготовленных данных на принтер или другой компьютер, который подключен к вычислительному блоку 29, например через Интернет.
Мобильное устройство в соответствии с изобретением пригодно для проведения резонансного анализа, а также для проведения вибрационного анализа. Целью резонансного анализа является установление собственных частот вибрационной машины 1 для определения подходящих рабочих частот. Вибрационный анализ используют для определения характерного вибрационного поведения вибрационной машины во время работы.
Как видно из фиг. 4, операция измерения в обоих случаях начинается с приведения мобильного устройства в состояние готовности к измерению. Для этого необходимо обеспечить, чтобы все электрические и электронные компоненты снабжались достаточным количеством электрической энергии для процесса измерения. Компоненты устройства также должны быть включены, соединены друг с другом и активированы в сети.
Блоки 26', 26", 26"' датчиков впоследствии крепят к значимым местам на вибрационной машине 1. В настоящем примере осуществления один блок 26' датчиков расположен в каждом из четырех углов рамы 2 грохота, предпочтительно на высоте обкладки 7 грохота, чтобы иметь возможность определять вибрационное поведение в области подачи материала и выгрузки материала, дифференцированное в соответствии с левой стороной грохота и правой стороной грохота. Для индикации вибрационного поведения в середине грохота, дополнительные блоки 26" датчиков могут быть расположены примерно посередине между блоками 26' датчиков на одной стороне машины. Другими подходящими местами являются концевые участки поперечины 5 возбудителя, где в данном случае закреплен блок 26"' датчиков.
Съемное крепление блоков 26', 26", 26"' датчиков к вибрационной машине 1 осуществляют с помощью магнитов 33, прикрепленных к стальной конструкции. Особенно подходят для этой цели плоские поверхности на раме 2 грохота, например, на наружных сторонах боковых пластин 3 и/или на поперечных элементах 4. Ориентация блока 26', 26", 26"' датчиков в пространстве или в плоскости крепежной поверхности произвольна, так как наклон блока 26', 26", 26"' датчиков относительно вертикали известен с помощью гравитационного датчика. Вектор силы тяжести G вместе с вектором ускорения определяет плоскость вибрации вибрационной машины 1, из которой можно установить точную пространственную ориентацию локальной системы координат X1, Y1 и Z1.
В случае резонансного анализа, если вибрационная машина 1 находится в состоянии покоя, то операцию измерения запускают синхронно во всех блоках 26', 26", 26"' датчиков в рамках временного окна 0,05 мс посредством соответствующего входа на вычислительном блоке 29, и затем вибрационную машину 1 приводят в состояние вибрации путем подачи одноразового импульса возбудителя, например, посредством удара молотом.
Датчики ускорения каждого блока 26', 26", 26"' датчиков впоследствии определяют амплитуду ускорения в зависимости от частоты вибрации вибрационной машины 1 относительно локальной системы координат X1, Y1 и Z1, определяемой датчиками ускорения, и сохраняют данные измерений в локальной памяти данных на время выполнения операции измерения.
В случае вибрационного анализа вибрационную машину 1 запускают до выполнения операции измерения. Вибрационная машина 1, таким образом, работает во время измерения и вибрирует на рабочей частоте, заданной возбудителем 14. Датчики ускорения блоков 26', 26", 26"' датчиков определяют амплитуду ускорения в осях локальной системы координат X1, Y1 и Z1 и сохраняют данные измерений в локальной памяти данных на время выполнения операции измерения.
После завершения операции измерения локальные данные измерений датчика силы тяжести и датчиков ускорения отдельных блоков 26', 26", 26"' датчиков передают в соответствии со стандартом IEEE 802.15.4 на модуль связи/шлюз 27, где их преобразуют в соответствии со стандартом IEEE 802.11 и передают в вычислительный блок 29 через маршрутизатор 28.
Записи данных отдельных блоков 26', 26", 26"' датчиков преобразуют в вычислительном блоке 29 в главную однородную систему координат X0, Y0, Z0. Главная система координат X0, Y0, Z0 может представлять собой, например, орбитальную систему координат, в которой ось Z0 соответствует вертикали, ось X0 соответствует горизонтали, обращенной в направлении транспортировки вибрационной машины 1, а ось Y0 соответствует поперечному перпендикуляру к двум другим осям, который, таким образом, направлен перпендикулярно направлению транспортировки. Аналогично, главная система координат X0, Y0, Z0 может быть предопределена колебательным движением вибрационной машины 1, в котором ось Z0 задана результирующим концом направления вибрации, при котором она проходит плоскопараллельно, ось X0 находится в плоскости вибрации, перпендикулярной оси Z0, а ось Y0, в свою очередь, перпендикулярна двум другим осям.
Преобразование данных измерений происходит на основе наклона локальной системы координат X1, Y1, Z1 в плоскости вибрации, определяемого в каждом случае в блоках 26', 26", 26"' датчиков с помощью датчика силы тяжести. После того как преобразование было выполнено, для каждого блока 26', 26", 26"' датчиков получены синхронные по времени данные ускорения, относящиеся к единой системе координат и, следовательно, являющиеся сопоставимыми, и они могут быть преобразованы в данные о скорости путем однократного интегрирования и в данные о траектории путем двойного интегрирования.
Из этих данных может быть получена информация о некоторых параметрах состояния и рабочих параметрах вибрационной машины 1, таких как частота вибрации, амплитуда вибрации, угол вибрации, синфазности вибрационного поведения в различных местах вибрационной машины 1, а также можно оценить возникновение самодеформаций во время работы машины и собственные колебания вибрационной машины 1 в состоянии покоя и во время работы машины.
После того как эти данные подготовлены в вычислительном блоке 29, спектры частот, например, с собственными и рабочими частотами, или вибрационное поведение вибрационной машины 1, включая самодеформации и собственные колебания, могут быть явно представлены на каркасной модели на дисплее или мониторе. Индивидуальные данные измерений могут быть сопоставлены с предельными значениями, и, если они превышены, может быть выдан оптический или акустический сигнал предупреждения и многое другое.
Список ссылочных позиций
1 вибрационная машина
2 рама грохота
3 боковые пластины
4 поперечина
5 поперечина возбудителя
6 продольная направляющая
7 обкладка грохота
8 дека грохота
9 ситовой корпус
10 изолирующая рама
11 первые пружинные элементы
12 вторые пружинные элементы
13 виброгаситель
14 возбудитель
15 подшипник
22 армирующий профиль
23 колонна
24 привод вращения
25 промежуточный вал
26 блок датчиков 26', 26", 26"'
27 модуль связи/шлюз
28 маршрутизатор
29 вычислительный блок
30 корпус
31 передняя сторона
32 задняя сторона
33 магнит
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО КОРРЕКЦИИ КООРДИНАТ В ГИДРОАКУСТИЧЕСКОЙ СИСТЕМЕ НАВИГАЦИИ | 1994 |
|
RU2106657C1 |
| ОПРЕДЕЛЕНИЕ ПОЗИЦИИ УСТРОЙСТВА В ТРАНСПОРТНОМ СРЕДСТВЕ | 2015 |
|
RU2700281C2 |
| СПОСОБ ДИНАМИЧЕСКОГО ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ МОБИЛЬНЫХ ОБЪЕКТОВ | 2016 |
|
RU2624790C1 |
| СИСТЕМА ОБСЛЕДОВАНИЯ ШАХТНОГО СТВОЛА С СИНХРОНИЗАЦИЕЙ ДВИЖЕНИЯ И СПОСОБ УПРАВЛЕНИЯ ЕЮ С СИНХРОНИЗАЦИЕЙ ДВИЖЕНИЯ | 2019 |
|
RU2752055C1 |
| Способ определения координат цели в системе запрос-ответ | 2021 |
|
RU2778019C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ МАШИНЫ ДЛЯ СКАЧИВАНИЯ ШЛАКА | 2021 |
|
RU2832218C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| УСТРОЙСТВО ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ПРОБОЯ ГЕРМООБОЛОЧКИ НЕПИЛОТИРУЕМОГО КОСМИЧЕСКОГО ОБЪЕКТА КОСМИЧЕСКИМИ ЧАСТИЦАМИ И СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТА ПРОБОЯ | 2008 |
|
RU2387965C1 |
| ОПТИЧЕСКОЕ ТРЕХКООРДИНАТНОЕ УСТРОЙСТВО КОНТРОЛЯ ВИБРОСМЕЩЕНИЙ | 1996 |
|
RU2137097C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
Группа изобретений относится к измерительной технике и может быть использована при вибродиагностике оборудования. Устройство содержит блоки (26', 26", 26"') датчиков, данные измерений с которых можно посредством беспроводной связи передать на вычислительный блок (29). Каждый блок датчиков оснащен по меньшей мере тремя датчиками ускорения, задающими локальную систему координат, датчиком силы тяжести для детектирования ориентации/направления локальной системы координат в пространстве и интегральной схемой для обработки данных измерений, полученных блоками датчиков. Блоки датчиков можно прикреплять к вибрационной машине (1) с возможностью отсоединения и на расстоянии друг от друга в произвольной ориентации/направлении. Вибрационной машиной может являться вибрационный грохот, вибрационный конвейер, вибрационная сушилка или футеровочно-возбуждаемый грохот. Способ содержит следующие этапы: прикрепляют по меньшей мере четыре блока датчиков к вибрационной машине; измеряют ускорение вибрационной машины относительно пространственных осей локальной системы координат в каждом блоке датчиков; преобразуют локальные данные измерений блоков датчиков в главную однородную систему координат; оценивают преобразованные данные измерений. 3 н. и 16 з.п. ф-лы, 4 ил.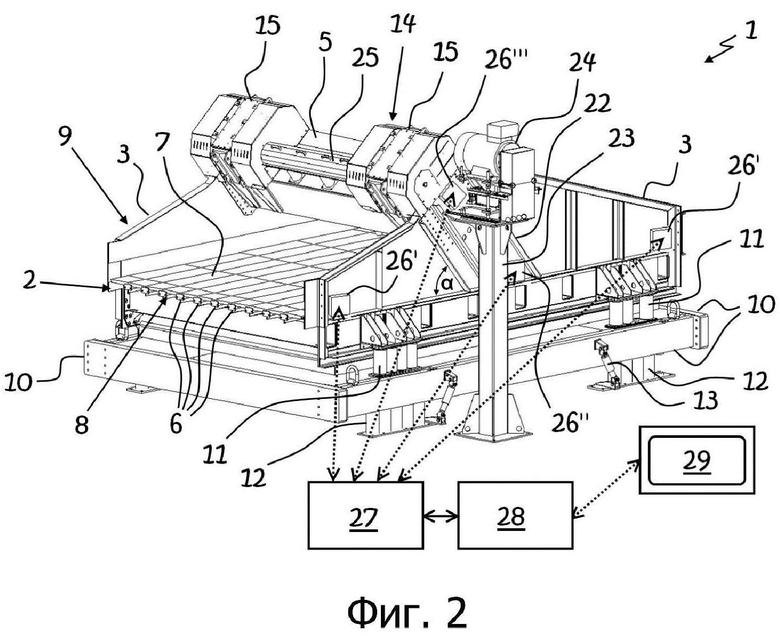
1. Мобильное устройство для обнаружения параметров состояния и рабочих параметров вибрационных машин (1), содержащее блоки (26', 26", 26"') датчиков и вычислительный блок (29), подключенный к блокам (26', 26", 26"') датчиков, причем данные измерений, полученные блоками (26', 26", 26"') датчиков, можно посредством беспроводной связи передать на вычислительный блок (29), и каждый блок (26', 26", 26"') датчиков оснащен по меньшей мере тремя датчиками ускорения, сориентированными перпендикулярно друг к другу, и интегральной схемой для обработки данных измерений, полученных блоками (26', 26", 26"') датчиков,
отличающееся тем, что
- по меньшей мере четыре блока (26', 26", 26"') датчиков образуют сеть датчиков, причем блоки (26', 26", 26"') датчиков можно прикреплять к вибрационной машине (1) с возможностью отсоединения на расстоянии друг от друга в произвольной ориентации/направлении; и
- по меньшей мере три датчика ускорения блока (26', 26", 26"') датчиков задают локальную систему координат X1, Y1, Z1,
- локальные данные измерений, полученные в блоке (26', 26", 26"') датчиков, относятся к его локальным пространственным осям; и
- каждый блок (26', 26", 26"') датчиков включает в себя датчик силы тяжести для детектирования ориентации/направления локальной системы координат X1, Y1, Z1 в пространстве; и
- вычислительный блок (29) включает в себя устройство для преобразования локальных данных измерений в главную однородную систему координат X0, Y0, Z0 с учетом данных измерений датчика силы тяжести.
2. Мобильное устройство по п. 1, отличающееся тем, что сеть датчиков включает в себя по меньшей мере шесть, предпочтительно по меньшей мере восемь блоков (26', 26", 26"') датчиков.
3. Мобильное устройство по п. 1 или 2, отличающееся тем, что сеть датчиков включает в себя модуль связи/шлюз (27) для направления потока данных от блоков (26', 26", 26"') датчиков и к ним.
4. Мобильное устройство по любому из пп. 1-3, отличающееся тем, что каждый датчик ускорения спроектирован как микроэлектромеханический компонент (MEMS) или пьезоэлектрический компонент.
5. Мобильное устройство по любому из пп. 1-4, отличающееся тем, что устройство включает в себя средство для синхронизации во времени операций измерения в отдельных блоках (26', 26", 26"') датчиков.
6. Мобильное устройство по п. 5, отличающееся тем, что временное окно для операций измерения имеет продолжительность максимум 0,1 мс, предпочтительно максимум 0,05 мс во всех блоках (26', 26", 26"') датчиков.
7. Мобильное устройство по любому из пп. 1-6, отличающееся тем, что каждый блок (26', 26", 26"') датчиков имеет память данных для временного хранения данных измерений.
8. Мобильное устройство по любому из пп. 1-7, отличающееся тем, что каждый блок (26', 26", 26"') датчиков включает в себя радиомодуль для беспроводного обмена данными, при этом радиочастота радиомодуля находится в диапазоне от 400 МГц до 900 МГц или в диапазоне от 2,4 ГГц до 6 ГГц.
9. Мобильное устройство по любому из пп. 1-8, отличающееся тем, что устройство включает в себя маршрутизатор (28), который подключен между сетью датчиков и вычислительным блоком (29), предназначенный для обмена данными между сетью датчиков и вычислительным блоком (29).
10. Мобильное устройство по любому из пп. 1-9, отличающееся тем, что устройство включает в себя дисплей для визуализации преобразованных данных измерений.
11. Мобильное устройство по любому из пп. 1-10, отличающееся тем, что устройство включает в себя модуль хранения энергии для подачи на устройство электрической энергии, предпочтительно перезаряжаемый модуль хранения энергии.
12. Мобильное устройство по любому из пп. 1-11, отличающееся тем, что блоки датчиков включают в себя магниты (33) для крепления к вибрационной машине (1) с возможностью отсоединения.
13. Вибрационная машина, содержащая устройство по любому из пп. 1-12, в частности вибрационный грохот, вибрационный конвейер, вибрационная сушилка или футеровочно-возбуждаемый грохот.
14. Способ обнаружения рабочих параметров и параметров состояния вибрационных машин (1), содержащий следующие этапы:
a) прикрепляют по меньшей мере четыре блока (26', 26", 26"') датчиков, включающих в себя датчик ускорения, в произвольном направлении/ориентации к вибрационной машине (1), причем каждый блок (26', 26", 26"') датчиков посредством своих датчиков ускорения задает локальную систему координат X1, Y1, Z1;
b) измеряют ускорение вибрационной машины (1) относительно пространственных осей локальной системы координат X1, Y1, Z1 в каждом блоке (26', 26", 26"') датчиков;
c) преобразуют локальные данные измерений блоков (26', 26", 26"') датчиков в главную однородную систему координат X0, Y0, Z0;
d) оценивают преобразованные данные измерений.
15. Способ по п. 14, в котором вибрационная машина (1) содержит прямоугольную вибрационную раму (2), которая образована боковыми пластинами (3) и поперечинами (4), соединяющими боковые пластины (3), отличающийся тем, что на этапе a) блок (26', 26", 26"') датчиков прикрепляют по меньшей мере в каждой из четырех угловых областей вибрационной рамы (2), и/или в концевых областях поперечин (5) возбудителя, и/или в концевых областях поперечин (4).
16. Способ по одному из пп. 14-15, отличающийся тем, что этап b) выполняют синхронно во времени во всех блоках (26', 26", 26"') датчиков, предпочтительно в пределах временного окна длительностью 0,1 мс, в частности 0,05 мс.
17. Способ по одному из пп. 14-16, отличающийся тем, что на этапе c) пространственную ориентацию/направление локальной системы координат X1, Y1, Z1 определяют на основе вибрационной плоскости вибрационной машины (1) и датчика силы тяжести.
18. Способ по одному из пп. 14-17, отличающийся тем, что на этапе c) данные измерений, полученные в блоках (26', 26", 26"') датчиков, преобразуют в систему координат X0, Y0, Z0, предопределенную осями вибрации и/или осями вибрационной машины (1).
19. Способ по одному из пп. 14-18, отличающийся тем, что на этапе d) данные измерений визуализируют на каркасной модели вибрационной машины (1).
| W0 2013165346 A1, 07.11.2013 | |||
| DE 102014001515 A1, 13.08.2015 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИИ | 2010 |
|
RU2492441C2 |

