Область техники, к которой относится изобретение
Настоящее изобретение относится к металлургической промышленности, а более конкретно – к способу определения параметров движения машины для скачивания шлака.
Уровень техники
В настоящее время основным техническим средством определения угла вращения, угла тангажа, высоты подъема, переднего и заднего телескопического расстояния машины для скачивания шлака является непосредственное измерение датчиком, установленным на корпусе машины для скачивания шлака, что включает в себя, помимо прочего, установку кодирующего устройства на оси вращения, установку датчика наклона на шлаковом плече и датчика положения в гидроцилиндре. Машины для скачивания шлака обычно устанавливаются в суровых условиях с высокими температурами и высоким содержанием металлической пыли; машины для скачивания шлака часто перемещаются и сильно вибрируют во время работы, что неблагоприятно влияет на точность обнаружения, стабильность и надежность датчиков. Кроме того, если датчик, установленный в гидроцилиндре, выходит из строя, его очень сложно отремонтировать.
Сущность изобретения
Учитывая технические дефекты и недостатки, присущие предшествующему уровню техники, вариант осуществления настоящего изобретения предлагает способ определения параметров движения машины для скачивания шлака, который преодолевает или, по меньшей мере, частично решает вышеуказанные проблемы, конкретное решение заключается в следующем:
Способ определения параметров движения машины для скачивания шлака, который включает в себя:
шаг 1: установку маркеров в качестве контрольных объектов на машине для скачивания шлака, установку верхних и боковых камер на машине для скачивания шлака и получение с помощью камер изображения текущего положения движения машины для скачивания шлака;
шаг 2: расчет и анализ изображений в режиме реального времени для определения угла вращения, угла тангажа, высоты подъема, переднего и заднего телескопического расстояния машины для скачивания шлака;
при этом определение угла вращения машины для скачивания шлака включает в себя следующие этапы:
шаг 2.11 – поворот машины для скачивания шлака в положение 0° и удержание ее в неподвижном положении; получение изображения, снятого верхней камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии M вдоль направления машины для скачивания шлака на изображении, снятом верхней камерой машины для скачивания шлака, при этом вспомогательная линия М совпадает с осью шлакового плеча машины для скачивания шлака, то есть проходит через геометрический центр маркера, используемого для определения угла вращения машины для скачивания шлака, и центр оси вращения машины для скачивания шлака; измерение физического расстояния Lsw от геометрического центра маркера, используемого для расчета угла вращения, до центра оси вращения машины для скачивания шлака на изображении, снятом верхней камерой машины для скачивания шлака; проведение на изображении, снятом верхней камерой машины для скачивания шлака, вспомогательной линии N на хвостовой части машины для скачивания шлака и определение соотношения объекта и изображения ka:  , где длина вспомогательной линии N на изображении равна la, а соответствующая фактическая физическая длина равна La; выбор двух точек P(x1, y1) и P(x2, y2) на вспомогательной линии M и определение линейного уравнения вспомогательной линии M на изображении:
, где длина вспомогательной линии N на изображении равна la, а соответствующая фактическая физическая длина равна La; выбор двух точек P(x1, y1) и P(x2, y2) на вспомогательной линии M и определение линейного уравнения вспомогательной линии M на изображении:  , где As = y2 – y1; Bs = x1 – x2; Cs = x2 · y1 – x1 · y2;
, где As = y2 – y1; Bs = x1 – x2; Cs = x2 · y1 – x1 · y2;
шаг 2.12 – получение изображения машины для скачивания шлака в режиме реального времени при перемещении машины в произвольное положение с помощью верхней камеры машины для скачивания шлака; получение информации о текущем положении маркера на изображении и координат Ps(x0, y0) геометрического центра маркера на изображении; определение фактического физического расстояния Lp от Ps(x0, y0) до вспомогательной линии M:  ; определение угла вращения
; определение угла вращения  машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:
машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:  ; коррекция угла вращения машины для скачивания шлака с помощью угла тангажа
; коррекция угла вращения машины для скачивания шлака с помощью угла тангажа  , в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения, и определение угла вращения машины для скачивания шлака:
, в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения, и определение угла вращения машины для скачивания шлака:  ; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Ps(x0, y0) и вспомогательной линии М на изображении, после определения угла вращения машины для скачивания шлака;
; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Ps(x0, y0) и вспомогательной линии М на изображении, после определения угла вращения машины для скачивания шлака;
при этом определение угла тангажа машины для скачивания шлака включает в себя следующие этапы:
шаг 2.21 – осуществление наклона машины для скачивания шлака в горизонтальное положение и удержание в неподвижном положении машины для скачивания шлака; получение изображения, снятого боковой камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии J вдоль направления машины для скачивания шлака на изображении, снятом боковой камерой машины для скачивания шлака, при этом вспомогательная линия J совпадает с осью шлакового плеча машины для скачивания шлака, то есть проходит через геометрический центр маркера, используемого для определения угла тангажа машины для скачивания шлака, и центр оси тангажа машины для скачивания шлака; измерение физического расстояния от геометрического центра маркера, используемого для расчета угла тангажа, до центра оси тангажа машины для скачивания шлака на изображении, снятом боковой камерой машины для скачивания шлака; проведение вспомогательной линии K на изображении, снятом боковой камерой машины для скачивания шлака, и определение соотношения объекта и изображения kb:  ; где длина вспомогательной линии K на изображении равна lb, а соответствующая фактическая физическая длина равна Lb; выбор двух точек P(x3, y3) и P(x4, y4) на вспомогательной линии J и определение линейного уравнения вспомогательной линии J на изображении: At · x + Bt · y + Ct = 0, где At = y4 – y3, Bt = x3 – x4, Ct = x4 · y3 – x3 · y4;
; где длина вспомогательной линии K на изображении равна lb, а соответствующая фактическая физическая длина равна Lb; выбор двух точек P(x3, y3) и P(x4, y4) на вспомогательной линии J и определение линейного уравнения вспомогательной линии J на изображении: At · x + Bt · y + Ct = 0, где At = y4 – y3, Bt = x3 – x4, Ct = x4 · y3 – x3 · y4;
шаг 2.22 – получение изображения машины для скачивания шлака в режиме реального времени с помощью боковой камеры машины для скачивания шлака при перемещении машины в произвольное положение; получение информации о текущем положении маркера на изображении и координат Pt(x0, y0) геометрического центра маркера на изображении; определение фактического физического расстояния Lq от Pt(x0, y0) до вспомогательной линии J:  ; определение угла тангажа
; определение угла тангажа  машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:
машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:  ; коррекция угла тангажа машины для скачивания шлака с помощью угла вращения в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения, следующим образом:
; коррекция угла тангажа машины для скачивания шлака с помощью угла вращения в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения, следующим образом:  ; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Pt(x0, y0) и вспомогательной линии J на изображении, после определения угла тангажа машины для скачивания шлака;
; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Pt(x0, y0) и вспомогательной линии J на изображении, после определения угла тангажа машины для скачивания шлака;
при этом определение высоты подъема машины для скачивания шлака включает в себя следующие этапы:
шаг 2.31 – перевод машины для скачивания шлака в крайнее нижнее положение и удержание в неподвижном положении машины для скачивания шлака; получение изображения, снятого боковой камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии S на изображении, снятом боковой камерой машины для скачивания шлака, по основанию машины для скачивания шлака параллельно фундаменту пола; измерение физического расстояния от геометрического центра маркера до вспомогательной линии S на изображении, снятом боковой камерой машины для скачивания шлака; проведение вспомогательной линии T на изображении, снятом боковой камерой машины для скачивания шлака и определение соотношения объекта и изображения kc:  , где длина вспомогательной линии T на изображении равна lc, а соответствующая фактическая физическая длина равна Lc; выбор двух точек P(x5, y5) и P(x6, y6) на вспомогательной линии S и определение линейного уравнения вспомогательной линии S на изображении: Ah · x + Bh · y + Ch = 0, где Ah = y6 – y5, Bh = x5 – x6, Ch = x6 · y5 – x5 · y6;
, где длина вспомогательной линии T на изображении равна lc, а соответствующая фактическая физическая длина равна Lc; выбор двух точек P(x5, y5) и P(x6, y6) на вспомогательной линии S и определение линейного уравнения вспомогательной линии S на изображении: Ah · x + Bh · y + Ch = 0, где Ah = y6 – y5, Bh = x5 – x6, Ch = x6 · y5 – x5 · y6;
шаг 2.32 – получение изображения машины для скачивания шлака в режиме реального времени с помощью боковой камеры машины для скачивания шлака при перемещении машины для скачивания шлака в произвольное положение; получение информации о текущем положении маркера на изображении и координат Ph(xh, yh) геометрического центра маркера на изображении; определение фактической высоты подъема H машины для скачивания шлака:  ;
;
при этом определение переднего и заднего телескопического расстояния машины для скачивания шлака включает в себя следующие этапы:
шаг 2.41 – размещение машины для скачивания шлака в конечном положении; поворот машины для скачивания шлака в положение 0°; наклон машины для скачивания шлака в горизонтальное положение и удержание машины для скачивания шлака в неподвижном состоянии; получение изображения, снятого боковой камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии W, перпендикулярной основанию пола, на заднем конце машины для скачивания шлака на изображении, снятом боковой камерой машины для скачивания шлака; измерение физического расстояния Lrd от геометрического центра маркера до вспомогательной линии W на изображении, снятом боковой камерой машины для скачивания шлака; проведение вспомогательной линии V на изображении, снятом боковой камерой машины для скачивания шлака, и определение соотношения объекта и изображения kd:  , где длина вспомогательной линии V на изображении равна ld, а соответствующая фактическая физическая длина равна Ld; выбор двух точек P(x7, y7) и P(x8, y8) на вспомогательной линии W и определение линейного уравнения вспомогательной линии W на изображении: Ad · x + Bd · y + Cd = 0, где Ad = y8 – y7; Bd = x7 – x8; Cd = x8 · y7 – x7 · y8;
, где длина вспомогательной линии V на изображении равна ld, а соответствующая фактическая физическая длина равна Ld; выбор двух точек P(x7, y7) и P(x8, y8) на вспомогательной линии W и определение линейного уравнения вспомогательной линии W на изображении: Ad · x + Bd · y + Cd = 0, где Ad = y8 – y7; Bd = x7 – x8; Cd = x8 · y7 – x7 · y8;
шаг 2.42 – получение изображения машины для скачивания шлака в режиме реального времени с помощью боковой камеры машины для скачивания шлака при перемещении машины в произвольное положение; получение информации о текущем положении маркера на изображении и координат Pd(xd, yd) геометрического центра маркера на изображении; определение фактического переднего и заднего телескопического расстояния D машины для скачивания шлака следующим образом:  .
.
Усовершенствование: вышеупомянутый способ также включает в себя:
видеосъемку движения машины для скачивания шлака с помощью камеры; извлечение изображений из видеосъемки движения машины для скачивания шлака через равные промежутки времени; указание для каждого изображения оси тангажа, оси вращения и маркеров машины для скачивания шлака на изображении; получение из каждого кадра получают информации о параметрах движения машины для скачивания шлака на изображении; создание набора данных на основе информации о параметрах движения, при этом информация о параметрах движения включает в себя: угол вращения, угол тангажа, высоту подъема, переднее и заднее телескопическое расстояние и положение маркера машины для скачивания шлака; обучение моделей нейронных сетей для распознавания и отслеживания объектов с помощью вышеупомянутого набора данных.
Усовершенствование: способ включает применение маркеров в качестве контрольных объектов по отдельности при расчете угла вращения, угла тангажа, высоты подъема, а также переднего и заднего телескопического расстояния, при этом геометрический центр маркера, используемого для расчета угла тангажа и угла вращения машины для скачивания шлака, расположен на центральной оси шлакового плеча машины для скачивания шлака.
Настоящее изобретение имеет следующие полезные эффекты:
В настоящем изобретении используются верхние и боковые камеры, установленные на машине для скачивания шлака, для получения изображений текущего положения машины для скачивания шлака при движении, а также выполняется расчет и анализ изображений в режиме реального времени для получения таких параметров, как угол вращения, угол тангажа, высота подъема и переднее и заднее телескопическое расстояние. Настоящее изобретение не требует установки датчика на машине для скачивания шлака, таким образом решается проблема сложности обслуживания датчика и влияния на точность обнаружения, стабильности и надежности датчика частых перемещений и вибраций машины для скачивания шлака во время работы.
Описание прилагаемых изображений
Фиг. 1 представляет собой технологическую схему метода измерения и расчета параметров положения четырехмерного движения машины для скачивания шлака, предусмотренного вариантом осуществления настоящего изобретения;
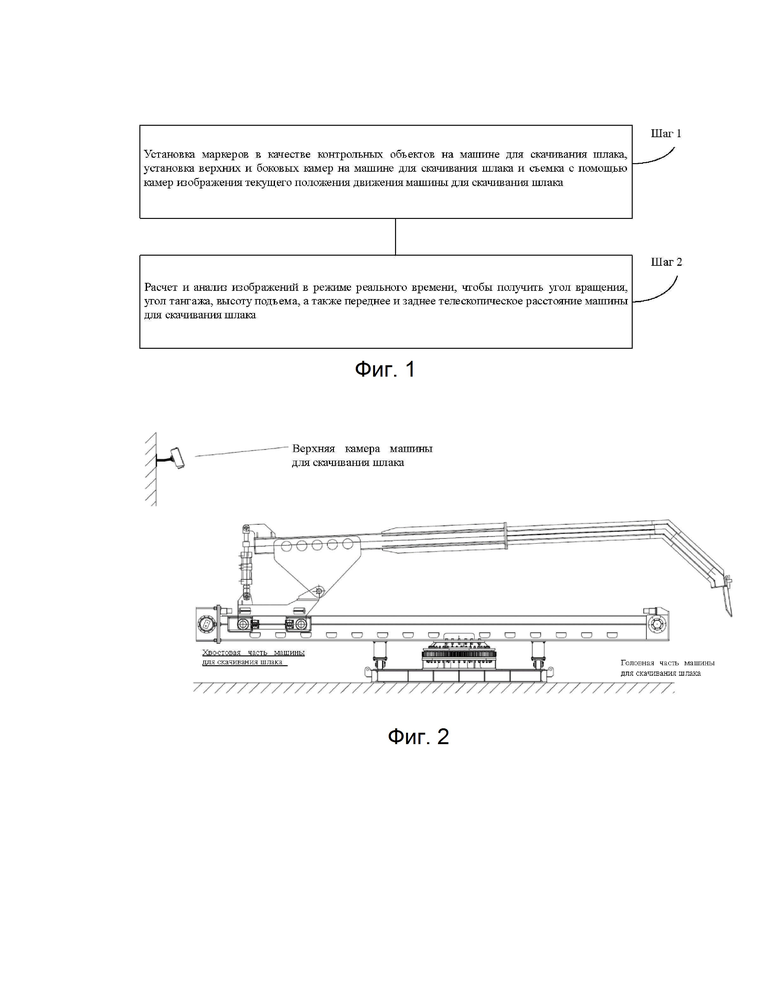
Фиг. 2 представляет собой монтажную схему верхней камеры машины для скачивания шлака, предусмотренной вариантом осуществления настоящего изобретения;
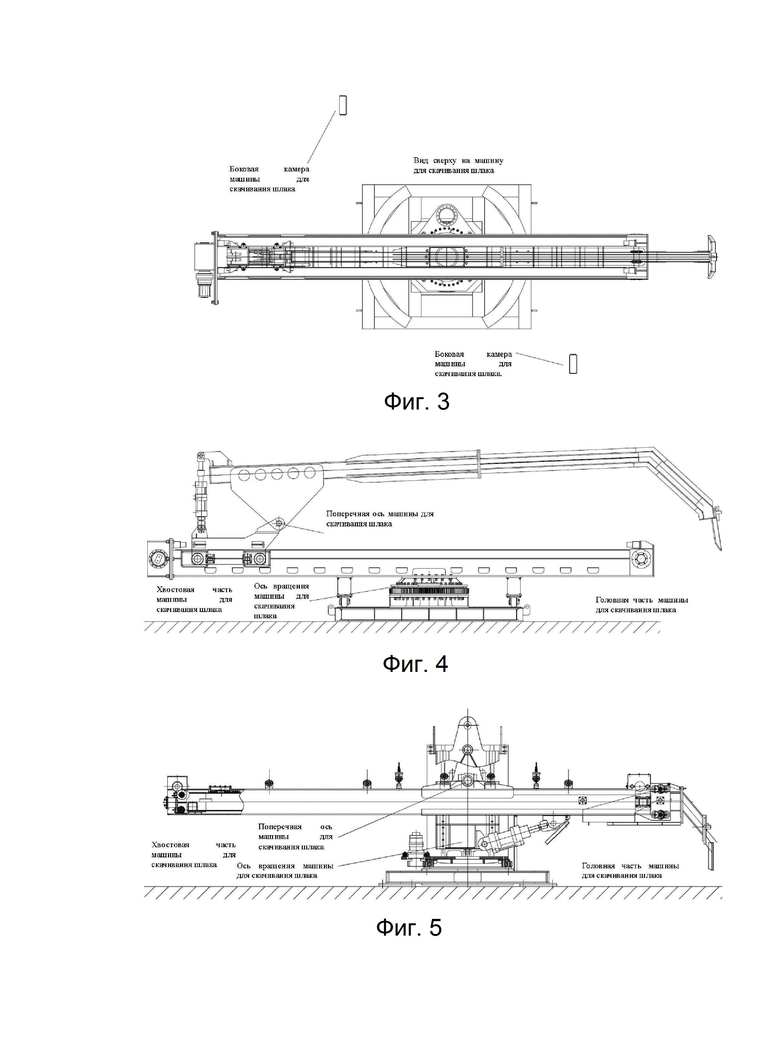
Фиг. 3 представляет собой монтажную схему боковой камеры машины для скачивания шлака, предусмотренной вариантом осуществления настоящего изобретения;
Фиг. 4 представляет собой схему модели машины для скачивания шлака, предусмотренной вариантом осуществления настоящего изобретения, хвостовая часть которой не выполняет наклонное движение;
Фиг. 5 представляет собой схему модели машины для скачивания шлака, предусмотренной вариантом осуществления настоящего изобретения, хвостовая часть которой выполняет как вращательное, так и наклонное движение;
Конкретные методы осуществления
Технические решения в вариантах осуществления настоящего изобретения четко и полностью описаны ниже с использованием прилагаемых изображений в вариантах осуществления настоящего изобретения; очевидно, что описанные варианты осуществления являются лишь некоторыми, а не всеми вариантами осуществления настоящего изобретения. Все другие варианты осуществления, основанные на вариантах осуществления настоящего изобретения и полученные специалистами в данной области техники без творческих усилий, входят в объем защиты настоящего изобретения.
Как показано на изображении 1, вариант осуществления настоящего изобретения предлагает метод измерения и расчета параметров положения четырехмерного движения машины для скачивания шлака, который что включает в себя:
Шаг 1: установка маркеров в качестве контрольных объектов на машине для скачивания шлака, установка верхних и боковых камер на машине для скачивания шлака и съемка с помощью камер изображения текущего положения движения машины для скачивания шлака;
Шаг 2: расчет и анализ изображений в режиме реального времени, чтобы получить угол вращения, угол тангажа, высоту подъема, а также переднее и заднее телескопическое расстояние машины для скачивания шлака.
В настоящем изобретении используются верхние и боковые камеры, установленные на машине для скачивания шлака, для получения изображений текущего положения машины для скачивания шлака при движении, а также выполняется расчет и анализ изображений в режиме реального времени для получения таких параметров, как угол вращения, угол тангажа, высота подъема и переднее и заднее телескопическое расстояние. В зависимости от условий на площадке можно использовать камеру видимого света, инфракрасную камеру или камеру дальнего инфракрасного диапазона. Помимо установки камер на площадке также необходимо оборудовать один или несколько серверов машинного зрения для обработки изображений, анализа и расчета результатов, кроме того, сервер машинного зрения не является необходимым, метод измерения и расчета, описанный в настоящем изобретении, также может быть непосредственно интегрирован в камеры и выполняться с помощью собственного программного обеспечения камеры, тем самым непосредственно выполняя обработку изображений, расчет и выдачу результатов.
Настоящее изобретение требует выбора подходящих маркеров на корпусе машины для скачивания шлака для анализа изображений. Если на корпусе машины для скачивания шлака нет подходящих маркеров, специальные маркеры можно изготовить и установить на машину для скачивания шлака, маркеры должны легко идентифицироваться и отличаться от фона, при этом геометрический центр маркера, используемого для расчета угла тангажа и угла вращения машины для скачивания шлака, должен находиться на центральной оси шлакового плеча.
Конкретное осуществление настоящего изобретения можно разделить на два этапа:
Обнаружение и отслеживание положения маркеров, которое конкретно выполняется следующим образом:
(1) Установите маркеры на машины для скачивания шлака (при необходимости).
(2) Установите верхние и боковые камеры на машине для скачивания шлака, исходное положение камер показано на фиг. 2 и 3; следует отметить, что количество и расположение камер корректируется в соответствии с реальными условиями на площадке, прилагаемые изображения предназначены только для иллюстрации.
(3) Используйте камеру, чтобы снять видео движения машины для скачивания шлака с заданной продолжительностью;
(4) Из видеосъемки движения машины для скачивания шлака извлекается заданное количество изображений, для каждого изображения отмечаются маркеры, используемые для расчета угла вращения, угла тангажа, высоты подъема, а также переднего и заднего телескопического расстояния, отмечается ось тангажа, ось вращения и другие объекты машины для скачивания шлака, создается набор данных;
(5) Используйте набор данных, полученный на шаге (4), для обучения нейронной сети и получения модели распознавания и отслеживания объектов.
Следует отметить, что при практическом применении модель распознавания и отслеживания объектов не обязательно использует технологию нейронных сетей, использование других технических решений для получения модели распознавания и отслеживания объектов и достижение тех же результатов не выходит за рамки принципов и объема настоящего запатентованного технического решения.
Расчет угла вращения  , угла тангажа
, угла тангажа  , высоты подъема H и переднего и заднего телескопического расстояния D машины для скачивания шлака. Для машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, угол вращения , угол тангажа могут быть измерены и рассчитаны с помощью метода, предусмотренного настоящим патентом; для машины для скачивания шлака, хвостовая часть которой выполняет как вращательное, так и наклонное движение, угол вращения и угол тангажа не являются независимыми, и один из параметров необходимо получить другим методом. Два различных типа машин для скачивания шлака показаны на изображениях 4 и 5;
, высоты подъема H и переднего и заднего телескопического расстояния D машины для скачивания шлака. Для машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, угол вращения , угол тангажа могут быть измерены и рассчитаны с помощью метода, предусмотренного настоящим патентом; для машины для скачивания шлака, хвостовая часть которой выполняет как вращательное, так и наклонное движение, угол вращения и угол тангажа не являются независимыми, и один из параметров необходимо получить другим методом. Два различных типа машин для скачивания шлака показаны на изображениях 4 и 5;
При этом расчет угла вращения машины для скачивания шлака производится следующим образом:
(1) Поверните машину для скачивания шлака в положение 0° и держите неподвижно, проведите вспомогательную линию M вдоль направления машины для скачивания шлака (т.е. в направлении длины плеча) на изображении, снятом верхней камерой машины для скачивания шлака, вспомогательная линия М совпадает с осью шлакового плеча машины для скачивания шлака, то есть проходит через геометрический центр маркера, используемого для определения угла вращения машины для скачивания шлака, и центр оси вращения машины для скачивания шлака;
(2) Измерьте физическое расстояние Lsw от геометрического центра маркера, используемого для расчета угла вращения, до центра оси вращения машины для скачивания шлака;
(3) На изображении, снятом верхней камерой машины для скачивания шлака, проведите еще одну вспомогательную линию N на хвостовой части машины для скачивания шлака. Вспомогательная линия N может быть ориентирована в любом направлении, длина вспомогательной линии N на изображении равна la, а соответствующая фактическая физическая длина равна La, и тогда можно вычислить соотношение объекта и изображения kb;
;
(4) Произвольно выберите две точки P(x1, y1) и P(x2, y2) на вспомогательной линии M, чтобы получить линейное уравнение вспомогательной линии M на изображении:
;
где, As = y2 – y1; Bs = x1 – x2; Cs = x2 · y1 – x1 · y2;
(5) Вышеуказанные шаги (1) ~ (4) являются подготовительными; когда машина для скачивания шлака перемещается в произвольное положение, верхняя камера машины для скачивания шлака получает изображение машины для скачивания шлака в режиме реального времени, изображение сначала проходит расчет модели распознавания и отслеживания объекта, обученной на этапе 1, для получения информации о текущем положении маркера, а затем может дополнительно вычислить координаты Ps(x0, y0) геометрического центра маркера на изображение;
(6) Используйте следующую формулу для расчета фактического физического расстояния Lp от Ps(x0, y0) до вспомогательной линии M;
;
(7) Для машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, рассчитайте угол вращения машины для скачивания шлака следующим образом:
;
(8) Для машины для скачивания шлака, хвостовая часть которой выполняет как вращательное, так и наклонное движение, угол вращения машины для скачивания шлака корректируется с помощью угла тангажа , а угол вращения машины для скачивания шлака равен:
;
После расчета угла вращения машины для скачивания шлака откорректируйте положительные и отрицательные знаки угла вращения машины для скачивания шлака исходя из взаимного положения Ps(x0, y0) и вспомогательной линии М на изображении.
При этом расчет угла тангажа машины для скачивания шлака производится следующим образом:
(1) Наклоните машину для скачивания шлака в горизонтальное положение (в это время угол тангажа считается равным 0 ) и держите неподвижно. Проведите вспомогательную линию J вдоль направления машины для скачивания шлака на изображении, снятом боковой камерой машины для скачивания шлака, вспомогательная линия J совпадает с осью шлакового плеча машины для скачивания шлака, то есть проходит через геометрический центр маркера, используемого для определения угла тангажа машины для скачивания шлака, и центр оси тангажа машины для скачивания шлака;
(2) Измерьте физическое расстояние Ltilt от геометрического центра маркера, используемого для расчета угла тангажа, до центра оси тангажа машины для скачивания шлака;
(3) На изображении, снятом боковой камерой машины для скачивания шлака, проведите еще одну вспомогательную линию K на машине для скачивания шлака. длина вспомогательной линии K на изображении равна lb, а соответствующая фактическая физическая длина равна Lb, и тогда можно вычислить соотношение объекта и изображения kb;
;
(4) Произвольно выбрав две точки P(x3, y3)и P(x4, y4) на вспомогательной линии J, можно получить линейное уравнение вспомогательной линии J на изображении:
At · x + Bt · y + Ct = 0;
где, At = y4 – y3, Bt = x3 – x4, Ct = x4 · y3 – x3 · y4;
(5) Вышеуказанные шаги (1) ~ (4) являются подготовительными. Когда машина для скачивания шлака перемещается в произвольное положение, получите изображение с помощью боковой камеры машины для скачивания шлака в режиме реального времени. Изображение сначала проходит расчет модели распознавания и отслеживания объекта, обученной на этапе 1, для получения информации о текущем положении маркера, а затем может дополнительно вычислить координаты Pt(x0, y0) геометрического центра маркера на изображение;
(6) Используйте следующую формулу для расчета фактического физического расстояния Lq от Pt(x0, y0) до вспомогательной линии J;
;
(7) Для машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, рассчитайте угол тангажа машины для скачивания шлака следующим образом:
(8) Для машины для скачивания шлака, хвостовая часть которой выполняет как вращательное, так и наклонное движение, угол тангажа машины для скачивания шлака корректируется с помощью угла вращения следующим образом:
;
После расчета угла тангажа машины для скачивания шлака откорректируйте положительные и отрицательные знаки угла вращения машины для скачивания шлака исходя из взаимного положения Pt(x0, y0) и вспомогательной линии J на изображении.
При этом расчет высоты подъема H машины для скачивания шлака производится следующим образом:
(1) Опустите машину для скачивания шлака в крайнее нижнее положение и держите неподвижно. На изображении, снятом боковой камерой машины для скачивания шлака, проведите вспомогательную линию S по основанию машины для скачивания шлака параллельно фундаменту пола;
(2) Измерьте физическое расстояние Lrh от геометрического центра маркера, используемого для расчета высоты подъема, до вспомогательной линии S;
(3) На изображении, снятом боковой камерой машины для скачивания шлака, проведите еще одну вспомогательную линию T на машине для скачивания шлака. Длина вспомогательной линии T на изображении равна lc, а соответствующая фактическая физическая длина равна Lc, и тогда можно вычислить соотношение объекта и изображения kc;
;
(4) Произвольно выбрав две точки P(x5, y5) и P(x6, y6) на вспомогательной линии S, можно получить линейное уравнение вспомогательной линии S на изображении:
Ah · x + Bh · y + Ch = 0;
где, Ah = y6 – y5, Bh = x5 – x6, Ch = x6 · y5 – x5 · y6;
(5) Вышеуказанные шаги (1) ~ (4) являются подготовительными. Когда машина для скачивания шлака перемещается в произвольное положение, боковая камера получает изображение машины для скачивания шлака в режиме реального времени. Изображение сначала проходит расчет модели распознавания и отслеживания объекта, обученной на этапе 1, для получения информации о текущем положении маркера, используемого для расчета высоты подъема, а затем может дополнительно вычислить координаты Ph(xh, yh) геометрического центра маркера на изображение;
(6) Используйте следующую формулу для расчета фактической высоты подъема H машины для скачивания шлака;
.
При этом переднее и заднее телескопическое расстояние D машины для скачивания шлака
(1) Втяните машину для скачивания шлака в конечное положение и поверните в положение 0°, наклоните в горизонтальное положение и держите неподвижно, на изображении, снятом боковой камерой машины для скачивания шлака, проведите вспомогательную линию W, перпендикулярную основанию пола на заднем конце машины для скачивания шлака;
(2) Измерьте физическое расстояние Lrd от геометрического центра маркера, используемого для расчета переднего и заднего телескопического расстояния, до вспомогательной линии W;
(3) На изображении, снятом боковой камерой машины для скачивания шлака, проведите еще одну вспомогательную линию V на машине для скачивания шлака, длина вспомогательной линии V на изображении равна ld, а соответствующая фактическая физическая длина равна Ld, и тогда можно вычислить соотношение объекта и изображения kd;
;
(4) Произвольно выбрав две точки P(x7, y7) и P(x8, y8) на вспомогательной линии W, можно получить линейное уравнение вспомогательной линии W на изображении:
Ad · x + Bd · y + Cd = 0;
где, Ad = y8 – y7; Bd = x7 – x8; Cd = x8 · y7 – x7 · y8;
(5) Вышеуказанные шаги (1) ~ (4) являются подготовительными. Когда машина для скачивания шлака перемещается в произвольное положение, боковая камера получает изображение машины для скачивания шлака в режиме реального времени. Изображение сначала проходит расчет модели распознавания и отслеживания объекта, обученной на этапе 1, для получения информации о текущем положении маркера, используемого для расчета переднего и заднего телескопического расстояния, а затем может дополнительно вычислить координаты Pd(xd, yd) геометрического центра маркера на изображение;
(6) Используйте следующую формулу для расчета переднего и заднего телескопического расстояния D машины для скачивания шлака;
.
Следует отметить, что пункт (3) метода расчета угла вращения, угла тангажа, высоты подъема и переднего и заднего телескопического расстояния машины для скачивания шлака является методом получения соотношения объекта и изображения, использование других методов получения соотношения объекта и изображения и его применение его в последующем процессе расчета по-прежнему не выходит за рамки принципов и объема настоящего запатентованного технического решения.
Вышеупомянутые методы являются лишь предпочтительными вариантами осуществления настоящего изобретения и не предназначены для ограничения настоящего изобретения, любые модификации, эквивалентные замены, улучшения и т.д., сделанные в рамках сущности и принципов настоящего изобретения, должны быть включены в объем защиты настоящего изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ комплексной калибровки пеленгатора - корреляционного интерферометра на мобильном носителе | 2016 |
|
RU2640354C1 |
| Способ определения собственных координат по трем визирным светоизлучающим маркерам | 2024 |
|
RU2838123C1 |
| Система посадки летательного аппарата на корабль с применением цифровых технологий | 2020 |
|
RU2734173C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И КОРРЕКЦИИ УГЛОВЫХ ОТКЛОНЕНИЙ СТОМАТОЛОГИЧЕСКОГО ИНСТРУМЕНТА | 2012 |
|
RU2532886C2 |
| СПОСОБ КАЛИБРОВКИ ВИДЕОГРАММЕТРИЧЕСКИХ СИСТЕМ И КОНТРОЛЬНОЕ ПРИСПОСОБЛЕНИЕ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2645432C1 |
| Способ измерений координат точек объекта в пространстве | 2020 |
|
RU2749654C1 |
| СПОСОБ УПРАВЛЕНИЯ АВТОМАТИЧЕСКОЙ ДОБЫЧЕЙ ПОЛЕЗНЫХ ИСКОПАЕМЫХ КАРЬЕРНЫМ ЭЛЕКТРИЧЕСКИМ ЭКСКАВАТОРОМ НА ОСНОВЕ ВСПОМОГАТЕЛЬНОГО ЗРЕНИЯ | 2023 |
|
RU2836991C2 |
| СПОСОБ ПОЛУЧЕНИЯ ТРЕХМЕРНОГО РАДИОЛОКАЦИОННОГО ИЗОБРАЖЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КУРСУ, ТАНГАЖУ И КРЕНУ ОБЪЕКТА ПРИ МНОГОЧАСТОТНОМ ИМПУЛЬСНОМ ЗОНДИРОВАНИИ | 2006 |
|
RU2327190C1 |
| СИСТЕМА КОНТРОЛЯ ГОЛОЛЁДНЫХ НАГРУЗОК НА ПРОВОДА ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧИ | 2017 |
|
RU2658344C1 |
| СПОСОБ ТЕПЛОВОГО НЕРАЗРУШАЮЩЕГО КОНТРОЛЯ ТЕПЛОТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК МНОГОСЛОЙНЫХ КОНСТРУКЦИЙ В НЕСТАЦИОНАРНЫХ УСЛОВИЯХ ТЕПЛОПЕРЕДАЧИ | 2009 |
|
RU2403562C1 |
Изобретение относится к металлургической промышленности, а именно к методу определения параметров положения машины для скачивания шлака. Предлагаемый способ определения параметров положения машины для скачивания шлака включает в себя: установку маркеров в качестве контрольных объектов на машине для скачивания шлака, установку верхних и боковых камер на машине для скачивания шлака и съемку с помощью камер изображения текущего положения движения машины; анализ изображений в режиме реального времени для определения угла вращения, угла тангажа, высоты подъема, а также переднего и заднего телескопического расстояния машины для скачивания шлака. Техническим результатом заявленного изобретения является упрощение обслуживания машины для скачивания шлака, а также повышение надёжности работы её датчиков. 2 з.п. ф-лы, 5 ил.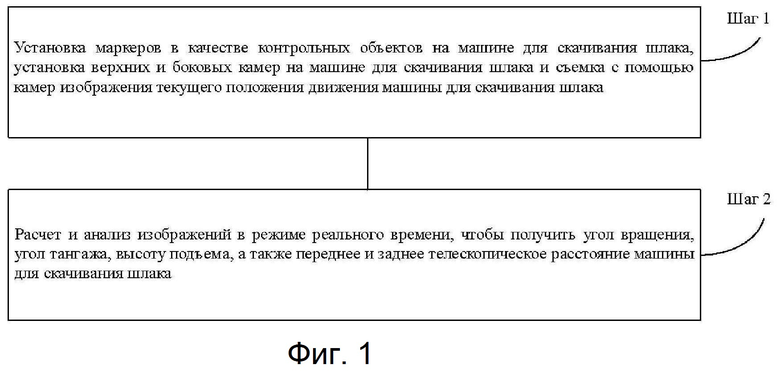
1. Способ определения параметров движения машины для скачивания шлака, отличающийся тем, что включает в себя:
шаг 1: установку маркеров в качестве контрольных объектов на машине для скачивания шлака, установку верхних и боковых камер на машине для скачивания шлака и получение с помощью камер изображения текущего положения движения машины для скачивания шлака;
шаг 2: расчет и анализ изображений в режиме реального времени для определения угла вращения, угла тангажа, высоты подъема, переднего и заднего телескопического расстояния машины для скачивания шлака;
при этом определение угла вращения машины для скачивания шлака включает в себя следующие этапы:
шаг 2.11 – поворот машины для скачивания шлака в положение 0° и удержание ее в неподвижном положении; получение изображения, снятого верхней камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии M вдоль направления машины для скачивания шлака на изображении, снятом верхней камерой машины для скачивания шлака, при этом вспомогательная линия М совпадает с осью шлакового плеча машины для скачивания шлака, то есть проходит через геометрический центр маркера, используемого для определения угла вращения машины для скачивания шлака, и центр оси вращения машины для скачивания шлака; измерение физического расстояния Lsw от геометрического центра маркера до центра оси вращения машины для скачивания шлака на изображении, снятом верхней камерой машины для скачивания шлака; проведение на изображении, снятом верхней камерой машины для скачивания шлака, вспомогательной линии N на хвостовой части машины для скачивания шлака и определение соотношения объекта и изображения ka:  , где длина вспомогательной линии N на изображении равна la, а соответствующая фактическая физическая длина равна La; выбор двух точек P(x1, y1) и P(x2, y2) на вспомогательной линии M и определение линейного уравнения вспомогательной линии M на изображении:
, где длина вспомогательной линии N на изображении равна la, а соответствующая фактическая физическая длина равна La; выбор двух точек P(x1, y1) и P(x2, y2) на вспомогательной линии M и определение линейного уравнения вспомогательной линии M на изображении:  , где As = y2 – y1; Bs = x1 – x2; Cs = x2 ⋅ y1 – x1 ⋅ y2;
, где As = y2 – y1; Bs = x1 – x2; Cs = x2 ⋅ y1 – x1 ⋅ y2;
шаг 2.12 – получение изображения машины для скачивания шлака в режиме реального времени при перемещении машины в произвольное положение с помощью верхней камеры машины для скачивания шлака; получение информации о текущем положении маркера на изображении и координат геометрического центра маркера на изображении Ps(x0, y0); определение фактического физического расстояния Lp от Ps(x0, y0) до вспомогательной линии M:  ; определение угла вращения
; определение угла вращения  машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:
машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:  ; коррекция угла вращения машины для скачивания шлака с помощью угла тангажа
; коррекция угла вращения машины для скачивания шлака с помощью угла тангажа  в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения и определение угла вращения машины для скачивания шлака:
в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения и определение угла вращения машины для скачивания шлака:  ; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Ps(x0, y0) и вспомогательной линии М на изображении, после определения угла вращения машины для скачивания шлака;
; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Ps(x0, y0) и вспомогательной линии М на изображении, после определения угла вращения машины для скачивания шлака;
при этом определение угла тангажа машины для скачивания шлака включает в себя следующие этапы:
шаг 2.21 – осуществление наклона машины для скачивания шлака в горизонтальное положение и удержание в неподвижном положении машины для скачивания шлака; получение изображения, снятого боковой камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии J вдоль направления машины для скачивания шлака на изображении, снятом боковой камерой машины для скачивания шлака, при этом вспомогательная линия J совпадает с осью шлакового плеча машины для скачивания шлака, то есть проходит через геометрический центр маркера, используемого для определения угла тангажа машины для скачивания шлака, и центр оси тангажа машины для скачивания шлака; измерение физического расстояния от геометрического центра маркера до центра оси тангажа машины для скачивания шлака на изображении, снятом боковой камерой машины для скачивания шлака; проведение вспомогательной линии K на изображении, снятом боковой камерой машины для скачивания шлака, и определение соотношения объекта и изображения kb:  , где длина вспомогательной линии K на изображении равна lb, а соответствующая фактическая физическая длина равна Lb; выбор двух точек P(x3, y3) и P(x4, y4) на вспомогательной линии J и определение линейного уравнения вспомогательной линии J на изображении: At ⋅ x + Bt ⋅ y + Ct = 0, где At = y4 – y3, Bt = x3 – x4, Ct = x4 ⋅ y3 – x3 ⋅ y4;
, где длина вспомогательной линии K на изображении равна lb, а соответствующая фактическая физическая длина равна Lb; выбор двух точек P(x3, y3) и P(x4, y4) на вспомогательной линии J и определение линейного уравнения вспомогательной линии J на изображении: At ⋅ x + Bt ⋅ y + Ct = 0, где At = y4 – y3, Bt = x3 – x4, Ct = x4 ⋅ y3 – x3 ⋅ y4;
шаг 2.22 – получение изображения машины для скачивания шлака в режиме реального времени с помощью боковой камеры машины для скачивания шлака при перемещении машины в произвольное положение; получение информации о текущем положении маркера на изображении и координат геометрического центра маркера на изображении Pt(x0, y0); определение фактического физического расстояния Lq от Pt(x0, y0) до вспомогательной линии J:  ; определение угла тангажа
; определение угла тангажа  машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:
машины для скачивания шлака, хвостовая часть которой не выполняет наклонное движение, следующим образом:  ; коррекция угла тангажа машины для скачивания шлака с помощью угла вращения в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения, следующим образом:
; коррекция угла тангажа машины для скачивания шлака с помощью угла вращения в случае осуществления хвостовой частью машины как вращательного, так и наклонного движения, следующим образом:  ; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Pt(x0, y0) и вспомогательной линии J на изображении, после определения угла тангажа машины для скачивания шлака;
; коррекция положительных и отрицательных углов вращения машины для скачивания шлака, исходя из взаимного положения Pt(x0, y0) и вспомогательной линии J на изображении, после определения угла тангажа машины для скачивания шлака;
при этом определение высоты подъема машины для скачивания шлака включает в себя следующие этапы:
шаг 2.31 – перевод машины для скачивания шлака в крайнее нижнее положение и удержание в неподвижном положении машины для скачивания шлака; получение изображения, снятого боковой камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии S на изображении, снятом боковой камерой машины для скачивания шлака, по основанию машины для скачивания шлака параллельно фундаменту пола; измерение физического расстояния от геометрического центра маркера до вспомогательной линии S на изображении, снятом боковой камерой машины для скачивания шлака; проведение вспомогательной линии T на изображении, снятом боковой камерой машины для скачивания шлака, и определение соотношения объекта и изображения kc:  , где длина вспомогательной линии T на изображении равна lc, а соответствующая фактическая физическая длина равна Lc; выбор двух точек P(x5, y5) и P(x6, y6) на вспомогательной линии S и определение линейного уравнения вспомогательной линии S на изображении: Ah ⋅ x + Bh ⋅ y + Ch = 0, где Ah = y6 – y5, Bh = x5 – x6, Ch = x6 ⋅ y5 – x5 ⋅ y6;
, где длина вспомогательной линии T на изображении равна lc, а соответствующая фактическая физическая длина равна Lc; выбор двух точек P(x5, y5) и P(x6, y6) на вспомогательной линии S и определение линейного уравнения вспомогательной линии S на изображении: Ah ⋅ x + Bh ⋅ y + Ch = 0, где Ah = y6 – y5, Bh = x5 – x6, Ch = x6 ⋅ y5 – x5 ⋅ y6;
шаг 2.32 – получение изображения машины для скачивания шлака в режиме реального времени с помощью боковой камеры машины для скачивания шлака при перемещении машины в произвольное положение; получение информации о текущем положении маркера на изображении и координат геометрического центра маркера на изображении Ph(xh, yh); определение фактической высоты подъема H машины для скачивания шлака:  ;
;
при этом определение переднего и заднего телескопического расстояния машины для скачивания шлака включает в себя следующие этапы:
шаг 2.41 – размещение машины для скачивания шлака в конечном положении; поворот машины для скачивания шлака в положение 0°; наклон машины для скачивания шлака в горизонтальное положение и удержание машины для скачивания шлака в неподвижном состоянии; получение изображения, снятого боковой камерой машины для скачивания шлака в этот момент; проведение вспомогательной линии W, перпендикулярной основанию пола, на заднем конце машины для скачивания шлака на изображении, снятом боковой камерой машины для скачивания шлака; измерение физического расстояния Lrd от геометрического центра маркера до вспомогательной линии W на изображении, снятом боковой камерой машины для скачивания шлака; проведение вспомогательной линии V на изображении, снятом боковой камерой машины для скачивания шлака, и определение соотношения объекта и изображения kd:  , где длина вспомогательной линии V на изображении равна ld, а соответствующая фактическая физическая длина равна Ld; выбор двух точек P(x7, y7) и P(x8, y8) на вспомогательной линии W и определение линейного уравнения вспомогательной линии W на изображении: Ad ⋅ x + Bd ⋅ y + Cd = 0, где Ad = y8 – y7; Bd = x7 – x8; Cd = x8 ⋅ y7 – x7 ⋅ y8;
, где длина вспомогательной линии V на изображении равна ld, а соответствующая фактическая физическая длина равна Ld; выбор двух точек P(x7, y7) и P(x8, y8) на вспомогательной линии W и определение линейного уравнения вспомогательной линии W на изображении: Ad ⋅ x + Bd ⋅ y + Cd = 0, где Ad = y8 – y7; Bd = x7 – x8; Cd = x8 ⋅ y7 – x7 ⋅ y8;
шаг 2.42 – получение изображения машины для скачивания шлака в режиме реального времени с помощью боковой камеры машины для скачивания шлака при перемещении машины в произвольное положение; получение информации о текущем положении маркера на изображении и координат геометрического центра маркера на изображении Pd(xd, yd); определение фактического переднего и заднего телескопического расстояния D машины для скачивания шлака следующим образом:  .
.
2. Способ по п. 1, отличающийся тем, что способ также включает в себя: видеосъемку движения машины для скачивания шлака с помощью камеры; извлечение изображений из видеосъемки движения машины для скачивания шлака через равные промежутки времени; указание для каждого изображения оси тангажа, оси вращения и маркеров машины для скачивания шлака на изображении; получение из каждого кадра информации о параметрах движения машины для скачивания шлака на изображении; создание набора данных на основе информации о параметрах движения, при этом информация о параметрах движения включает в себя: угол вращения, угол тангажа, высоту подъема, переднее и заднее телескопическое расстояние и положение маркера машины для скачивания шлака; обучение моделей нейронных сетей для распознавания и отслеживания объектов с помощью вышеупомянутого набора данных.
3. Способ по п. 1, отличающийся тем, что включает применение маркеров в качестве контрольных объектов по отдельности при расчете угла вращения, угла тангажа, высоты подъема, а также переднего и заднего телескопического расстояния, при этом геометрический центр маркера, используемого для расчета угла тангажа и угла вращения машины для скачивания шлака, расположен на центральной оси шлакового плеча машины для скачивания шлака.
| CN 112093075 A, 18.12.2020: описание - с.2, абз.0005; с.5, абз.0049 | |||
| CN 103323229 B, 03.02.2016 | |||
| CN 112432612 A, 02.03.2021 | |||
| УСТАНОВКА ДЛЯ ПОЛУЧЕНИЯ СТАЛИ | 2010 |
|
RU2550975C2 |

