Изобретение относится к области вибрационной техники и может быть использовано при проектировании и усовершенствовании вибрационных технологических машин.
Динамическое состояние рабочих органов технологических машин создается вибровозбудителями различной природы, что представляет собой, как правило, формирование в некоторой точке рабочего органа вибрационной силы. Такая сила приводит в движение систему и предопределяет соответствующую форму распределения амплитуд колебаний точек рабочего органа по его длине.
Условия возбуждения вибраций рабочего органа достаточно разнообразны, зависят от многих факторов, что стимулирует поиск и разработку новых способов и средств оценки, контроля и управления динамическими состояниями технологических вибрационных машин [1-3].
Среди рациональных способов и средств возбуждения вибрационных полей, коррекции динамических состояний распространение получили варианты с установкой одного вибрационного возбудителя; определенную известность приобрели подходы, ориентированные на введение дополнительных связей, что достаточно подробно описано в научной литературе [1-3].
Вместе с тем ряд направлений поисков рациональных решений еще не получил должной степени детализации представлений о действии силовых факторов, что связано с нетрадиционными приемами перемещения источника внешнего возбуждения.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
1. Известно изобретение [Скрипка Д.О. «Вибрационная установка», 95574 U1, МПК В22С 15/00, приоритет 10.07.2010], представляющее собой вибрационную установку для обеспечения спецэффекта колебаний - «имитация землетрясения» за счет передачи крутящего момента от вала с измененным центром тяжести рабочей машины через опоры к пластине из
железа, установленной на основании рамы-каркаса. Технический результат от использования данного технического решения достигается за счет того, что вибрационная установка состоит из рамы выполненного в виде металлического блока-каркаса, в форме параллелепипеда, обшитого стальным тонколистовым прокатом, сверху по его краям укладывают резиновую прокладку (для смягчения вибрации). Затем на последнюю укладывают пластину из железа, под которой предварительно смонтированы вибровозбудитель колебаний в виде рабочей машины с электродвигателем с жесткозакрепленными опорами при этом, рабочая машина имеет вал с измененным центром тяжести, который через муфту связан с электродвигателем. Необходимо отметить, что вал с измененным центром тяжести установлен на подшипниках скольжения (последние на чертеже не указаны).
Недостатками данного изобретения являются отсутствие регулирования динамического состояния, а также отсутствие математического описания режимов работы устройства.
2. Известно устройство для гашения колебаний [Елисеев С.В., Ермошенко Ю.В., Московских А.О., Большаков Р.С. «Устройство для гашения колебаний», патент №2498126 C2, МПК F16F 7/112, F16F 15/027 приоритет 10.11.2013], содержащее упругие элементы и систему динамического гашения колебаний в виде упруго присоединенной массы. Объект защиты содержит настраиваемую систему динамического гашения колебаний. Система динамического гашения содержит пневмобаллон с клапаном, компрессор с трубопроводом и систему управления с датчиками. Пневмобаллон закреплен на опорной плите, перемещающейся в соединении типа «ласточкин хвост» при помощи самотормозящегося винтового устройства. Датчики установлены на объекте защиты и на динамическом гасителе колебаний и передают информацию о состоянии объекта защиты и динамического гасителя в блок обработки информации для принятия
решения о включении компрессора и винтового устройства. Достигается динамическое гашение колебаний по двум координатам.
Рассмотренное изобретение имеет ряд недостатков, к числу которых можно отнести сложность конструкции и отсутствие возможности формирования устойчивых динамических режимов работы.
3. Известно изобретение [Каварма И.И., Кальницкий A.M., Кондратенко В.Ф., Горбачев Ю.Г.[UA] «Вибрационная транспортирующая машина», патент №2028264 С1, МПК В6527/20, приоритет 09.02.1995], представляющее собой вибрационный привод, содержащий вибратор, в корпусе которого на подшипниках установлен дебалансный вал, соединенный посредством упругой муфты с электродвигателем. Корпус закреплен в центре тяжести рабочего органа вибромашины, установленного посредством упругих опор на неподвижной раме, где также смонтирован электродвигатель. Муфта имеет ведущую полумуфту, закрепленную на валу двигателя, и ведомую полумуфту, закрепленную на дебалансном валу. Между собой полумуфты связаны упругими элементами, выполненными, например, в виде лепестков из конвейерной ленты. На полумуфте дополнительный дебаланс закреплен синфазно с дебалансным валом при зарезонансной настройке машины или противофазно при ее дорезонансной настройке.
Недостатками представленного аналога являются отсутствие регулирования динамического состояния и отсутствие математического описания режимов работы устройства.
4. За прототип взят способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления [Елисеев С.В., Елисеев А.В., Каимов Е.В., Нгуен Д.Х., Выонг К.Ч. «Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления», патент №2624757 С1, МПК F16F 15/02, приоритет
06.07.2017], состоящий из рабочего органа в виде твердого тела на упругих элементах, имеющего инерционный вибровозбудитель, действующий в определенной точке, отличающийся введением в конструктивно-техническую схему системы устройства для преобразования движения в виде несамотормозящегося винтового механизма с гайкой-маховиком с перемещением вдоль рабочего органа точки приложения усилия, возникающего при работе элементов винтовой пары, генерирующей дополнительные стабилизирующие движения рабочего органа таким образом, чтобы вибрационное поле имело однородную структуру и обеспечивало возможности регулирования и настройки вибрационной системы для реализации необходимых параметров технологического процесса. Устройство, реализующее способ, представляющее собой конструктивно-технический блок, состоящий из винтового несамотормозящегося механизма с массивной гайкой-маховиком, на торцевой части которой может быть создан момент сил путем прижатия тормозной колодки специальным приводом, что генерирует управляющее воздействие в определенной точке рабочего органа вибростенда; устройство для преобразования движения также отличается тем, что точка приложения усилия на рабочий орган может изменяться в результате перемещения конструктивного блока вдоль рабочего органа с помощью синхронно работающих двух электроприводов, обеспечивающих перемещение верхней и нижней частей конструктивно-технического блока с помощью ходовых винтов, управляемого специальным программным блоком, в который для расчетов по заложенной математической модели поступает информация с датчиков, контролирующих вибрационное состояние и системы.
Основным недостаткам прототипа является отсутствие режима совместной работы крайних точек вибрационной машины, а также наличие в системе элемента, создающего дополнительную силу.
Задачей изобретения является управление динамическим состоянием вибрационной технологической машины при помощи изменения положения вибровозбудителя.
Устройство управления динамическим состоянием вибрационной технологической машины, содержит твердое тело на упругих опорах, вибровозбудитель, датчики, сервоприводы с ходовыми винтами, отличается тем, что ходовые винты и сервоприводы дополнительно установлены сверху рабочего органа на всем его протяжении для перемещения вдоль него размещенного в центре вибровозбудителя.
Суть изобретения поясняется чертежами.
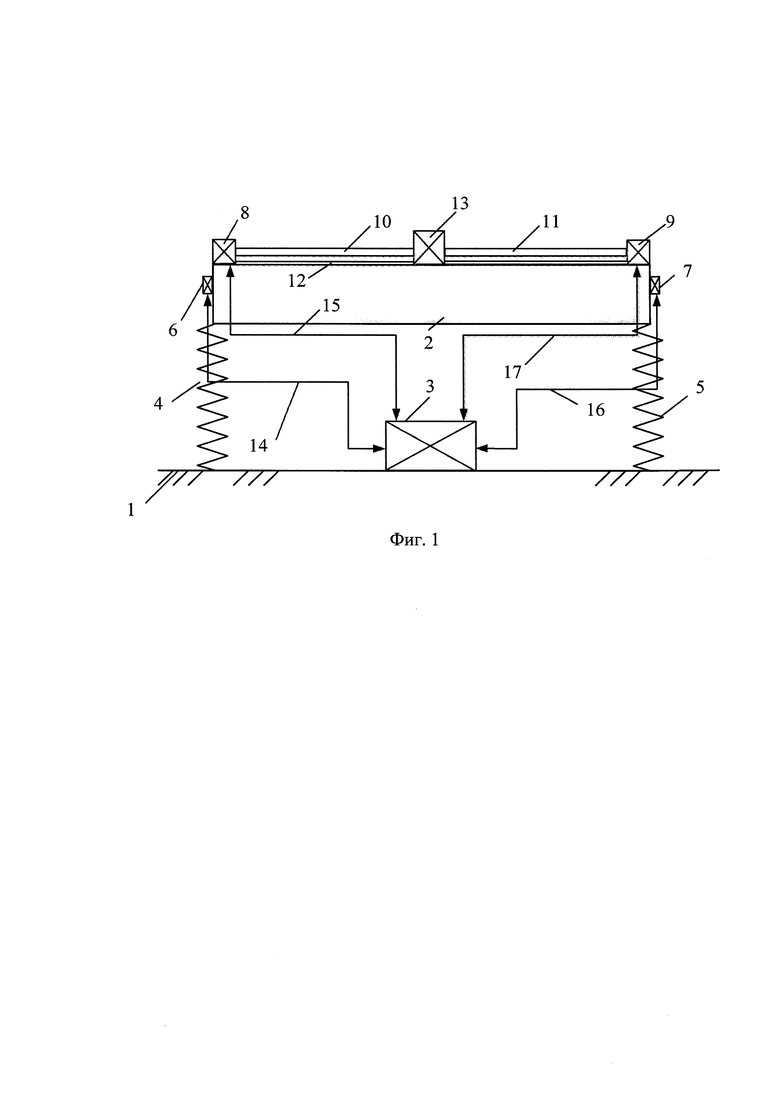
На фиг. 1 показана принципиальная схема вибрационной технологической машины с устройствами настройки динамического состояния, содержащая опорную поверхность 1, рабочий орган 2, блок управления 3, упругие элементы 4, 5, датчики 6, 7, электрические сервоприводы 8, 9, ходовые винты 10, 11, направляющие 12, вибровозбудитель 13, коммуникационные связи 14, 15, 16, 17.
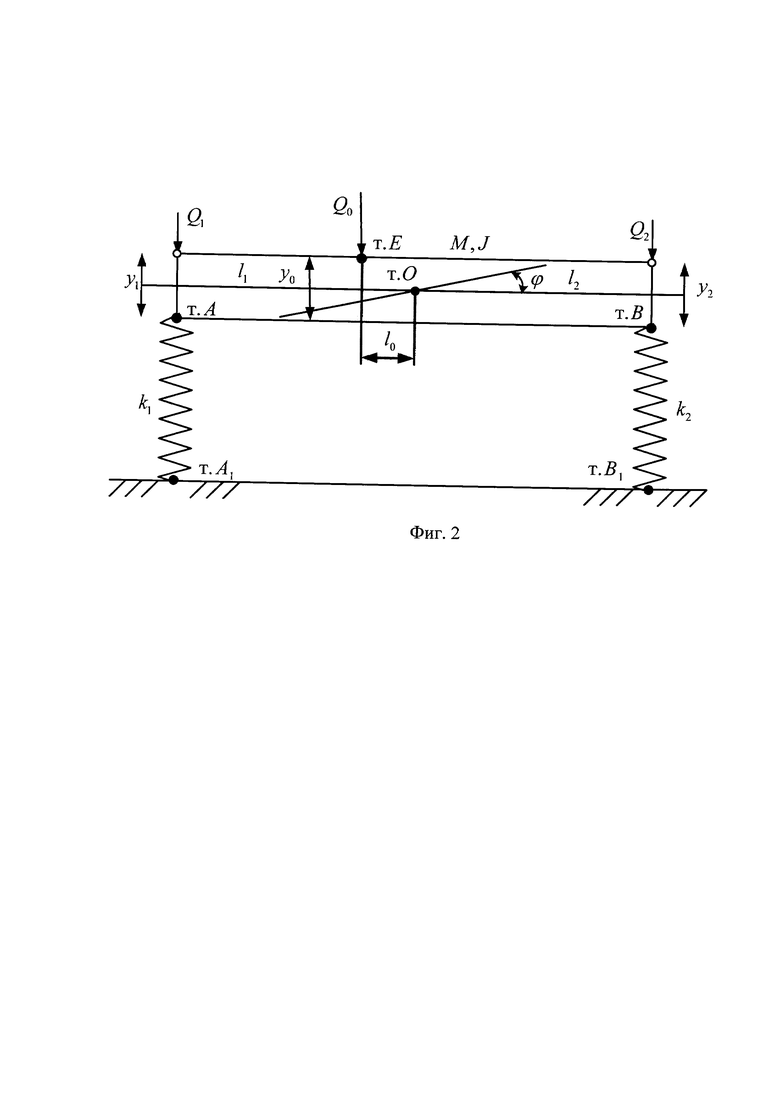
На фиг. 2 показана расчетная схема системы по фиг. 1.
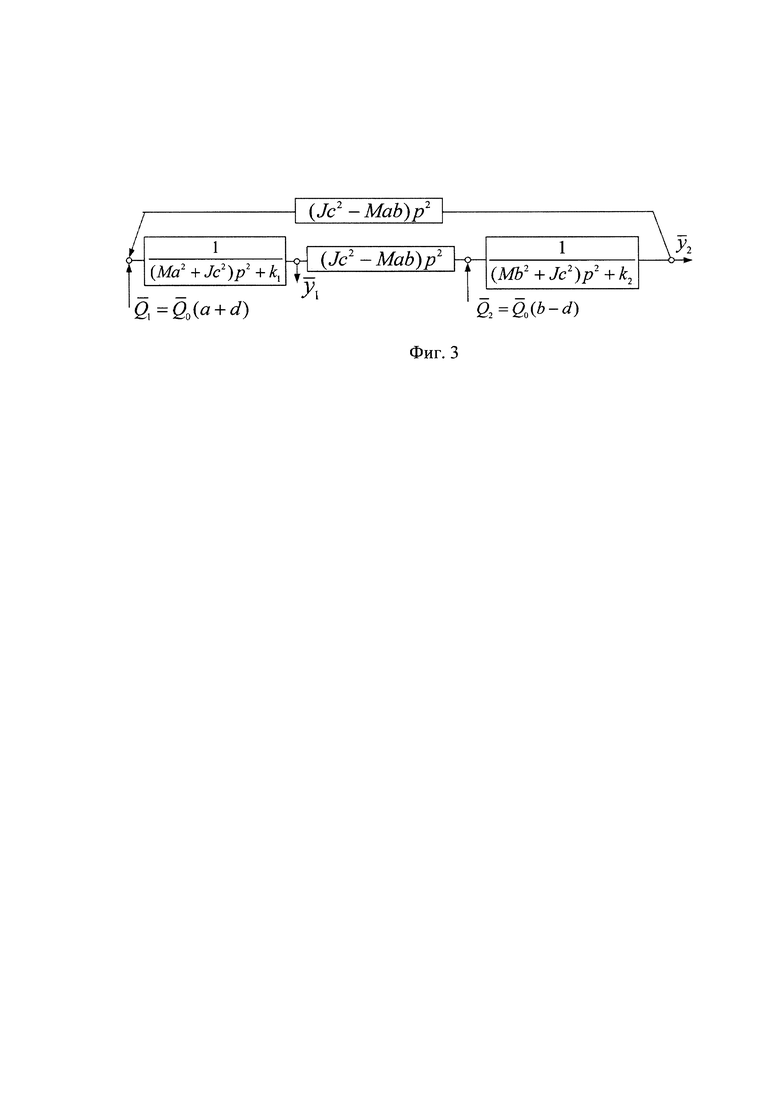
На фиг. 3 показана структурная математическая модель (структурная схема) исходной системы технологической вибрационной машины по фиг. 2.
На фиг. 4 представлена диаграмма расположения узла колебаний при 
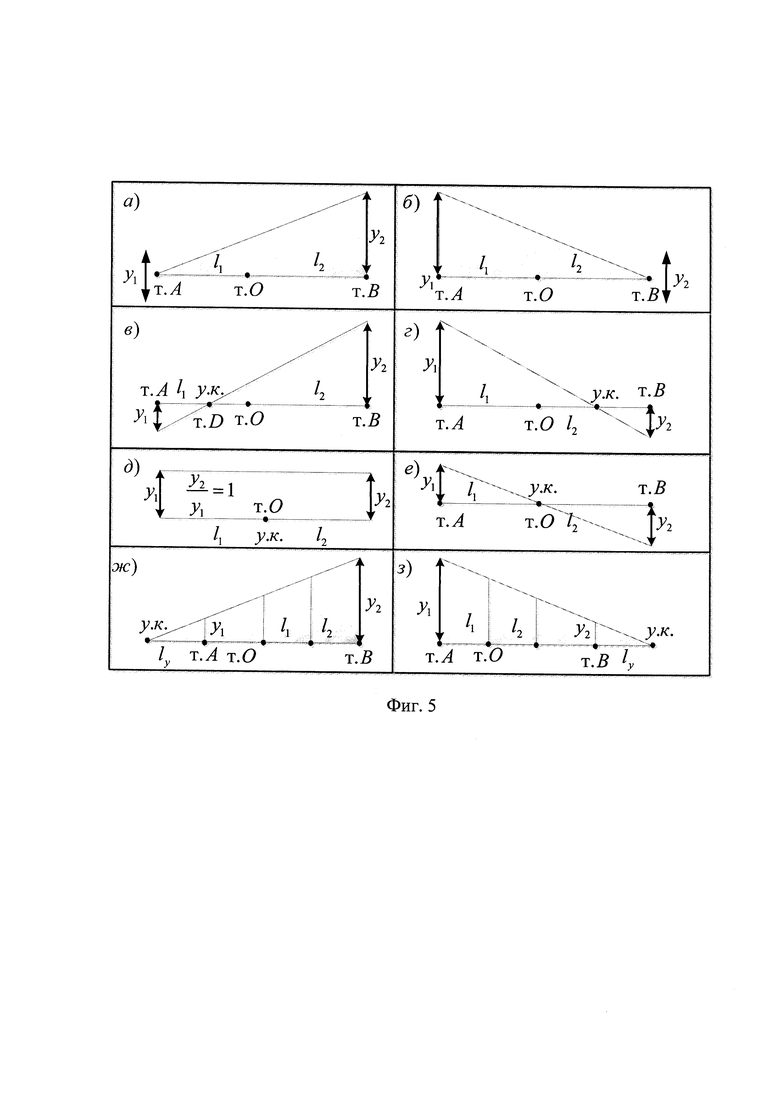
На фиг. 5 приведены варианты взаимного расположения смещений по координатам  и
и  в стационарном режиме при
в стационарном режиме при  : а) случай
: а) случай  ,
,  ; б) случай
; б) случай  ,
,  ; в) случай
; в) случай  ,
,  , узел колебаний - т. D,
, узел колебаний - т. D,  ; г) случай
; г) случай  ,
,  , узел колебаний - т. D,
, узел колебаний - т. D,  ; д) случай
; д) случай  - узел колебаний бесконечно удален,
- узел колебаний бесконечно удален,  ; е) случай
; е) случай  узел колебаний - т. D; ж) случай выноса узла колебаний т. А за пределы твердого тела; з) случай выноса узла колебаний за пределы т. В твердого тела.
узел колебаний - т. D; ж) случай выноса узла колебаний т. А за пределы твердого тела; з) случай выноса узла колебаний за пределы т. В твердого тела.
Принцип функционирования устройства реализуется следующим образом.
Предлагаемое изобретение реализует способ настройки динамического состояния вибрационной технологической машины, осуществляющийся механической колебательной системой, состоящей из рабочего органа 2 (твердое тела массой М и моментом инерции J). Рабочий орган 2 через упругие элементы 4 и 5 с соответствующими жесткостями k1 и k2 опирается на неподвижную поверхность 1, а также имеет установленный сверху вибровозбудитель 13, приводимый в движение при помощи сервоприводов 8, 9 и ходовых винтов 10, 11 по направляющим 12.
Управление работой системы производится в автоматическом режиме блоком управления 3, установленном на неподвижной опорной поверхности 1. Блок управления связан с датчиками 6 и 7, фиксирующими амплитуды колебаний рабочего органа по координатам y1 и y2, через коммуникационные связи 15, 17. Сервоприводы 8, 9 также имеют коммуникационные связи 14, 16 с блоком управления 3.
Блок управления 3 содержит микропроцессор, отрабатывающий алгоритм управления движением вибровозбудителя по направляющим, что создает возможности изменения силовых факторов по координатам y1 и y2 и позволяет получать различные динамические режимы работы вибрационной технологической машины, в том числе формирование соотношения между координатами, равного единице.
Теоретическое обоснование устройства управления динамическим состоянием технологической вибрационной машины
Практика оценки, контроля и управления формированием динамических состояний технологических вибрационных машин, определение динамических реакций в соединениях элементов системы и прочностные расчеты ориентированы на возможности представления технических объектов в виде механических колебательных систем с несколькими степенями свободы (чаще всего не более трех). Предполагается, что технические объекты совершают малые колебания и обладают линейными свойствами. С учетом таких подходов расчетная схема технологической вибрационной машины, приведенной на фиг. 1, может быть представлена в виде механической колебательной системы балочного типа с двумя степенями свободы. Рабочий орган машины в этом случае рассматривается в виде протяженного твердого тела (массой М и моментом инерции J), расположенного на опорной поверхности на упругих линейных пружинах с жесткостями k1 и k2. Вибрации объекта вызываются внешней гармонической силой Q0 (фиг. 2), которая приложена в т. Е, отстоящей от центра масс (т. О) твердого тела на расстояние l0. Центр масс, в свою очередь, расположен на расстояниях l1 и l2 от тт. А и В рабочего органа. Движение системы может быть описано в системах координат y1, y2 или y0, ϕ; между которыми имеются соотношения

где 
Предполагается, что система совершает малые колебания относительно положения статического равновесия при практическом отсутствии сил сопротивления движению.
1. В соответствии с [4] сила Q0, приложенная в т. Е может быть трансформирована в систему двух сил, приложенных в тт. А и В:

Система дифференциальных уравнений движения по рис. 1 может быть представлена в операторной форме на основе использования известных подходов [2, 5]:


где  - комплексная переменная, значок
- комплексная переменная, значок  над переменной означает ее изображение по Лапласу при нулевых начальных условиях.
над переменной означает ее изображение по Лапласу при нулевых начальных условиях.
2. Используя (4), (5), можно ввести в рассмотрение структурную математическую модель исходной системы (фиг. 2) в виде структурной схемы (фиг. 3) эквивалентной в динамическом отношении системы автоматического управления [2].
Структурная математическая модель имеет два парциальных блока, связанных инерционной связью.
3. Передаточные функции системы при одновременном действии двух силовых факторов  и
и  определяются по координатам
определяются по координатам  и
и  выражениями
выражениями


где  - является характеристическим частотным уравнением системы.
- является характеристическим частотным уравнением системы.
Из выражений (6), (7) могут быть найдены соответствующие частоты динамического гашения колебаний:
по координате  -
-

по координате  -
-

В выражениях (9), (10) принято, что
В данном случае α является, по своей сути, коэффициентом связности между внешними воздействиями  и
и  , когда выполняется условие
, когда выполняется условие

В работе [5] частично рассмотрены особенности динамических состояний различных технических объектов, в рамках научной гипотезы о возможности практической реализации коэффициента связности внешних сил в форме α. В данном случае связность внешних воздействий в конструктивно-техническом виде реализуется за счет возможного перемещения точки Е рабочего органа. В соответствии с (12) коэффициентом связности α может принимать положительные и отрицательные значения, а также принимать при изменениях l0 и экстремальные значения.
4. Из выражений (9), (10) следует, частоты динамического гашения колебаний зависят от выше введенного коэффициента α. В обычных подходах, когда внешнее воздействие является одиночным и приложено по
одной из координат, то есть либо в т. А, либо в т. В, то частота динамического гашения определяется так называемыми парциальными частотами

В обычных ситуациях, когда на систему действует одна сила, приложенная по координате  или
или  , частоты динамического гашения колебаний совпадают с парциальными частотами, определяемыми (13), (14).
, частоты динамического гашения колебаний совпадают с парциальными частотами, определяемыми (13), (14).
Введем в рассмотрение передаточную функцию межпарциальных связей коэффициент связности внешних сил α:

Физический смысл передаточной функции (15) заключается в том, что она дает представление о закономерностях распределения амплитуд колебаний рабочего органа по его длине. Преобразуем (15) к виду

Выражение (16) можно переписать в виде

Где 
Используя выражения (15), (16), можно детализировать представления о коэффициенте связности амплитуд колебаний по координатам  и
и  , признав, что
, признав, что

тогда из (16), (17) получим выражение для α

5. Зная параметры системы М, Jc2, а, b, i и задавшись частотой ω2, можно найти соответствующее значение α. В свою очередь, из (19) можно также найти частоту  , на которой при заданных М, Jc2, а, b и i выражение примет вид
, на которой при заданных М, Jc2, а, b и i выражение примет вид

Из (19) следует, что при заданных α, i, М, Jc2, a, b, k1 и k2 можно найти частоту, на которой реализуется необходимое распределение амплитуд колебаний точек твердого тела (или рабочего органа).
Параметр α, то есть коэффициент связности внешних воздействий определяется через параметры a, b, α, что позволяет получить

Поскольку  , то при известных l1 и l2 определяется и расположение точки приложения силы
, то при известных l1 и l2 определяется и расположение точки приложения силы  . При настройке параметров вибрационного поля таким образом, что при известных параметрах системы, может быть реализован итеративный процесс получения необходимых настроечных данных для технологической машины. Обычно такие данные определяются при разработке технологического процесса.
. При настройке параметров вибрационного поля таким образом, что при известных параметрах системы, может быть реализован итеративный процесс получения необходимых настроечных данных для технологической машины. Обычно такие данные определяются при разработке технологического процесса.
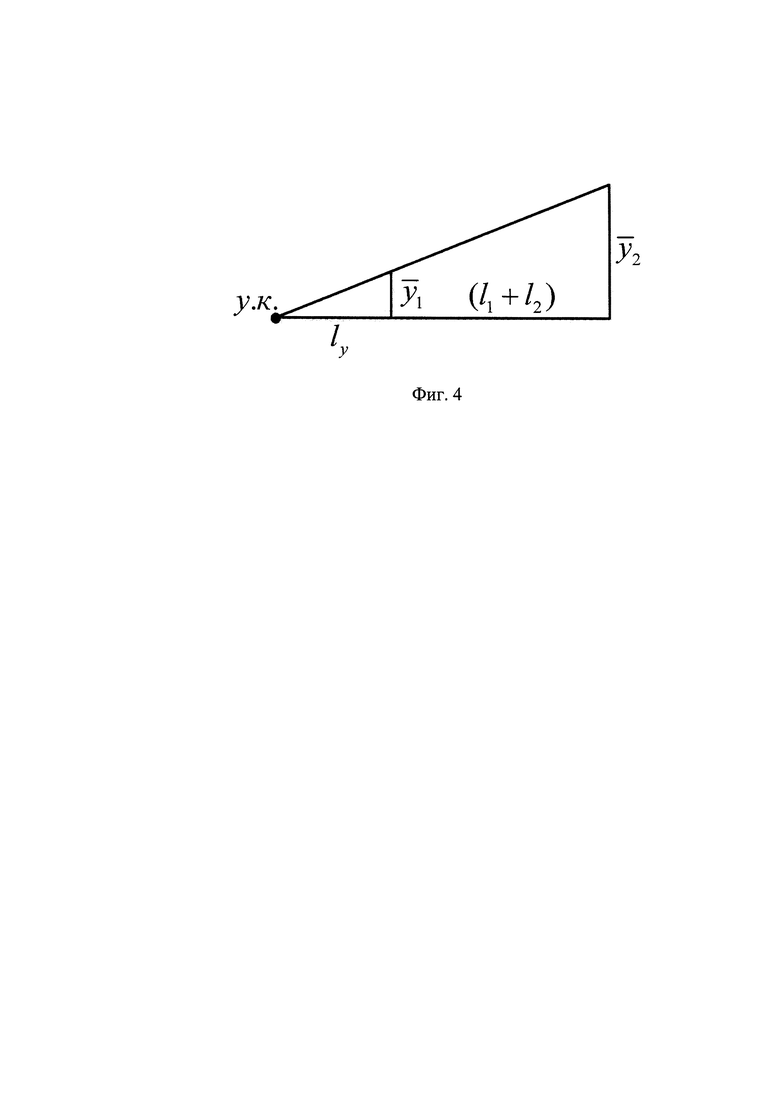
6. Если будет известна величина i, то, используя условия подобия, можно найти закономерности распределения амплитуд колебаний точек рабочего органа по его длине. Если известно значение α, то при заданных i, a, b, d можно найти положение узла колебаний. Вариант распределения амплитуд колебаний  приводится на диаграмме (фиг. 4).
приводится на диаграмме (фиг. 4).
Из подобия треугольников найдем, что

тогда

Таким образом, предлагаемый подход позволяет создать условия для определения необходимых данных о структуре вибрационного поля или распределении амплитуд колебаний точек рабочего органа.
7. Выражение (17) можно преобразовать к виду

Из (19) при параметрах системы, определяемых выражениями (17'), (17''), можно найти частоту возбуждения рабочего органа, обеспечивающую необходимое значение параметра i.
8. Сопоставим варианты формирования распределений амплитуд точек рабочего органа, полагая, что длина AB (рис. 1) определяется соотношением

Общая схема взаимного отношения амплитуд колебаний точек твердого тела может быть представлена диаграммами, приведенными на фиг. 5. Рассмотрение диаграмм на фиг. 5 дает представление о
закономерностях распределения амплитуд колебаний точек рабочего органа. Так, для случаев, приведенных на фиг. 5 по координате  реализуется режим динамического гашения колебаний; по фиг. 5, б - режим колебаний по координате
реализуется режим динамического гашения колебаний; по фиг. 5, б - режим колебаний по координате  . На фиг. 5, в и г, приведены режимы колебаний, когда узел колебаний (т. D) находится между тт. А и В, что предполагает возможности угловых колебаний совместно с поступательными движениями. При выполнении условия
. На фиг. 5, в и г, приведены режимы колебаний, когда узел колебаний (т. D) находится между тт. А и В, что предполагает возможности угловых колебаний совместно с поступательными движениями. При выполнении условия  узел колебаний (т. D) находится посередине твердого тела. Если узел колебаний и центр масс совпадают, то твердое тело теряет возможность поступательных движений и совершает только угловые колебания. При
узел колебаний (т. D) находится посередине твердого тела. Если узел колебаний и центр масс совпадают, то твердое тело теряет возможность поступательных движений и совершает только угловые колебания. При  твердое тело может совершать только вертикальные прямолинейные колебания при отсутствии угловых. Из (17) следует, что коэффициент связности амплитуд колебаний i реализуется на определенной частоте
твердое тело может совершать только вертикальные прямолинейные колебания при отсутствии угловых. Из (17) следует, что коэффициент связности амплитуд колебаний i реализуется на определенной частоте
Используя (23), можно оценить возможные виды распределения амплитуд на каждой из частот внешнего возмущения с учетом параметров систем. Коэффициент связности а учитывается в структуре выражения (9) через коэффициенты А и В (выражения (17'), (17'')). Если принять, что

то параметр i будет зависеть от частоты внешнего воздействия; при заданном i и параметрах системы частота определится выражением (24).
9. Управление динамическим состоянием вибрационного рабочего органа можно реализовать с помощью установки только одного вибровозбудителя, который генерирует сосредоточенную силу. Теоретические исследования показывают, что сосредоточенная сила, приложенная в некоторой точке рабочего органа (в данном случае т. Е)
может быть заменена эквивалентной в динамическом отношении системой из двух сил, которые будут разнесены по координатам y1 (А1) и y2 (В1). В рассматриваемом случае эквивалентных преобразований полученная система двух связанных сил. Коэффициент связности этих сил определяется формулой  . Используя значения α, а также значения i как коэффициент межпарциальной связности координат, можно определить положение характерных точек и частот колебаний, которые определяют особенности динамических состояний вибрационного органа, представленных на фиг. 5, а также режим отсутствия угловых колебаний:
. Используя значения α, а также значения i как коэффициент межпарциальной связности координат, можно определить положение характерных точек и частот колебаний, которые определяют особенности динамических состояний вибрационного органа, представленных на фиг. 5, а также режим отсутствия угловых колебаний:

Заключение. Предлагаемый способ управления динамическим состоянием вибрационной технологической машины отличается простотой реализации, поскольку необходимое распределение амплитуд колебаний точек рабочего органа определяется параметрами конструктивно-технического исполнения машины, доступными для оценки. Коэффициенты связности координат движения  и
и  вполне доступны при визуальном доступе или могут определяться с помощью обычных вибродатчиков с последующей обработкой информации в блоке управления.
вполне доступны при визуальном доступе или могут определяться с помощью обычных вибродатчиков с последующей обработкой информации в блоке управления.
Предлагается метод, позволяющий построить математические модели на основе технологий структурного математического моделирования. Используемые структурные математические модели обеспечивают получение необходимых передаточных функций и функций межпарциальных связей. Все необходимые данные могут быть получены на основании аналитических расчетов при известных параметрах технологической системы.
Предлагаемая методологическая основа дает возможность не только обеспечить получение данных о выборе места приложения вибровозбудителя, но и оценить возможности масштаба изменения динамического состояния рабочего органа, в том числе и через частотное характеристическое уравнение, а также определять расположение узлов
колебаний рабочих органов с выделением параметров, неблагоприятно влияющих на устойчивость работы системы.
Список литературы
1. Копылов Ю.Р. Динамика процессов виброударного упрочнения: монография / Воронеж: ИПЦ «Научная книга», 2011. - 569 с.
2. Елисеев С.В., Артюнин А.И. Прикладная теория колебаний в задачах динамики линейных механических систем / С. В. Елисеев, А.И. Артюнин. - Новосибирск: Наука, 2016. - 459 с.
3. Елисеев А.В., Сельвинский В.В., Елисеев С.В. Динамика вибрационных взаимодействий элементов технологических систем с учетом неудерживающих связей. - Новосибирск: Наука, 2015. - 332 с.
4. Лойцянский, А.И. Лурье. Курс теоретической механики. В 2 т. Л.Г. - Т. 2.: Динамика. М.: Дрофа, 2006. - 7-е изд., испр. и доп. - 719 с.
5. Елисеев С.В. Прикладной системный анализ и структурное математическое моделирование (динамика транспортных и технологических машин: связность движений, вибрационные взаимодействия, рычажные связи): монография - Иркутск: ИрГУПС, 2018. - 692 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
Изобретение относится к области машиностроения. Устройство управления динамическим состоянием вибрационной технологической машины содержит твердое тело на упругих опорах, вибровозбудитель, датчики, сервоприводы с ходовыми винтами. Ходовые винты и сервоприводы дополнительно установлены сверху рабочего органа на всем его протяжении для перемещения вдоль него размещенного в центре вибровозбудителя. Достигается возможность управления динамическим состоянием вибрационной технологической машины при помощи изменения положения вибровозбудителя. 5 ил.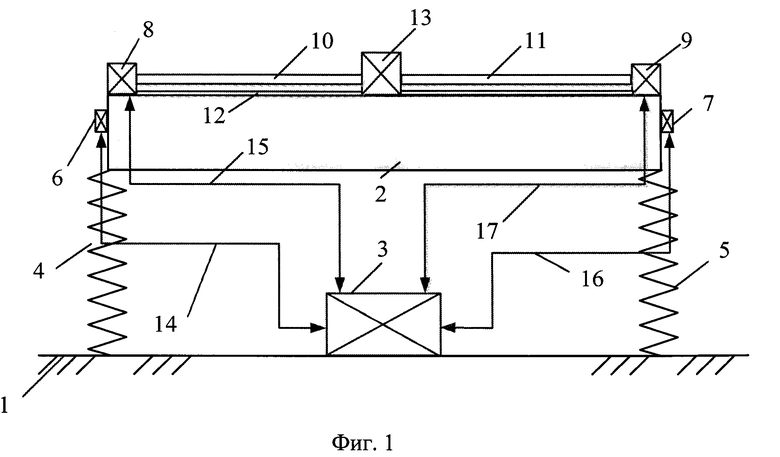
Устройство управления динамическим состоянием вибрационной технологической машины, содержащее твердое тело на упругих опорах, вибровозбудитель, датчики, сервоприводы с ходовыми винтами, отличающееся тем, что ходовые винты и сервоприводы дополнительно установлены сверху рабочего органа на всем его протяжении для перемещения вдоль него размещенного в центре вибровозбудителя.
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Колосоуборка | 1923 |
|
SU2009A1 |
| Дисковый питатель погрузчика | 1960 |
|
SU136112A1 |

