Изобретение относится к области авиационного двигателестроения, в частности к способам управления реверсивным устройством газотурбинного двигателя (ГТД) при торможении самолета в условиях посадки и прерванного взлета.
В настоящее время практически на всех типах пассажирских и транспортных самолетах с ГТД применяются реверсивные устройства, изменяющие направление реактивной струи двигателя на противоположное, создавая обратную тягу, обеспечивающее торможение самолета после его посадки или в случае прерванного взлета.
Известен способ управления реверсивным устройством турбореактивного двухконтурного двигателя типа ПС-90А, заключающийся в том, что после посадки самолета пилот переводит рычаг управления двигателем (далее РУД) на площадку «Малый газ», затем пилот переводит рычаг управления реверсом (далее РУР), шарнирно соединенным с РУД, на площадку «Минимальная обратная тяга», что обеспечивает выдачу воздействий на гидроцилиндр механического замка и гидроцилиндры для перевода реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга». После открытия механического замка и перевода реверсивного устройства в положение «Обратная тяга» с помощью концевых переключателей формируют информационные сигналы «Замок реверса открыт» и «Реверс включен» в кабину экипажа. Далее экипаж переводит РУР в положение «Максимальная обратная тяга», что обеспечивает увеличение расхода топлива в камеру сгорания, и, следовательно, максимальную величину обратной тяги газотурбинного двигателя («Авиационный двигатель ПС-90А» под редакцией Иноземцева А.А., изд. М.: Либра-К, 2007, стр. 101-112).
При прерванном взлете самолета, например, из-за неожиданно возникшей помехи на взлетной полосе или пожара на борту, пилот, согласно руководству по летной эксплуатации, резко переводит РУД из положения максимального (взлетного) режима в положение «Малый газ». Затем без задержки на площадке «Минимальная обратная тяга» и не дожидаясь прохождения информационных сигналов «Замок реверса открыт» и «Реверс включен», пилот резко переводит РУР сразу в положение максимальной обратной тяги (Руководство по летной эксплуатации Ту-204-300. Эксплуатация систем и оборудования - силовая установка. Стр. 8.1.43…8.1.45). В результате происходит высокоскоростное включение реверсивного устройства на режим «Максимальная обратная тяга» и экстренное торможение самолета.
К недостаткам аналога следует отнести:
- повышенные габариты и масса гидромеханической системы управления реверсом, ее относительная сложность так как необходимо использование самолетной гидросистемы подачи давления;
- пониженная надежность включения реверса из-за возможных поломок, перекосов или заеданий элементов применяемой механической системы тросов, тяг и качалок.
Кроме того, данному аналогу, как и другим подобным электронногидромеханическим и гидравлическим системам управления реверсивным устройством RU №2570303 (МПК F02K 1/76, опубл. 10.12.2015), US №2015090810 (МПК F02K 1/56; F02K 1/76, опубл. 02.04.2015), которые используют силовые гидравлические цилиндры для перекладки подвижных элементов реверса присущ недостаток, связанный с тем, что гидроцилиндры, как правило, работают на максимально возможной мощности, на которую они спроектированы, что вызывает преждевременный износ оборудования. Но такими условиями, где требуется максимальная мощность гидроцилиндров и минимальное время включения реверсивного оборудования на максимальную обратную тягу являются главным образом, только прерванный взлет.
Кроме того, применяемые в гидросистемах гидрожидкости типа НГЖ или «Skydrol» токсичны и могут причинить вред здоровью. Так, в частности, пары гидрожидкости типа НГЖ легко проникают через неповрежденную кожу, могут оказать воздействие на нервную систему и органы дыхания технического персонала. Поэтому к гидравлической системе также предъявляются повышенные требования по герметичности, а при ее обслуживании следует строго соблюдать правила по охране труда и меры безопасности.. В целом расходы на эксплуатацию гидромеханических реверсивных устройств носят затратный характер.
Известны способы управления реверсивным устройством турбореактивного двигателя с применением электромеханических систем RU №2502885 (МПК F02K 1/76, опубл. 27.12.2013), RU №2556474 (МПК F02K 1/76, опубл. 10.07.2015), RU №2572730 (МПК F02K 1/76, опубл. 20.01.2016), RU №2142569 (МПК F02K 1/76, опубл. 10.12.1999), RU №2690549 (МПК F02K 1/76, F02K 1/766, опубл. 04.06.2019) в которых снят ряд вышеуказанных недостатков по массе, габаритам, экологичности, эксплуатационным затратам, присущих гидравлическим системам. В указанных аналогах для перемещения подвижных элементов реверсивного устройства применяют электромеханические привода, управление которых осуществляется с помощью электронного регулятора двигателя из состава цифровой электронной системы типа FADEC (Full Authority Digital Engine Control system) или иного электронного блока управления.
Общим недостатком данных электромеханических систем является то, что как в случае штатной посадки самолета и стандартного включения реверсивного устройства, так и в случае прерванного взлета, электромеханический привод работает одинаково и с максимальным вращательным моментом, что также негативно влияет на надежность и эксплуатационный ресурс применяемого электрического двигателя. В конечном итоге возникает повышенный риск выхода из строя силового электромеханического оборудования и не включение реверсивного устройства двигателя.
Известен способ управления включением реверсора тяги RU №2392474 (МПК F02K 1/76, опубл. 20.06.2010), в котором вышеупомянутый недостаток частично преодолен. В указанном аналоге для перемещения подвижных элементов реверсивного устройства применяют электромеханический привод, управляемый с помощью электронного регулятора двигателя из состава цифровой системы типа FADEC, при этом дополнительно анализируют по меньшей мере один параметр, характеризующий работу турбореактивного двигателя, и выполняют последовательность операций, в которой рабочие параметры электрического двигателя приводят в соответствие с рабочей ситуацией. Из описания формулы патента следует, что в качестве анализируемого параметра для оценки рабочей ситуации используют частоту вращения ротора низкого давления турбореактивного двигателя, а выполняемую последовательность операций выбирают из по меньшей мере двух предварительно заданных последовательностей. В частности, при низком значении частоты вращения вентилятора двигателя, т.е. при включении реверса на малом газе после штатной посадки самолета, обеспечивается пониженный момент вращения / меньшая частота вращения электродвигателя; при высоком значении частоты вращения вентилятора, т.е. при включении реверса на взлетном режиме, обеспечивается максимальный момент вращения / высокая частота вращения электродвигателя.
Основным недостатком данного аналога является низкая точность определения (идентификации) начала прерванного взлета при отказах и неисправностях турбореактивного двигателя.
Так, в случае недобора тяги турбореактивного двигателя на взлетном режиме в процессе разбега самолета по взлетно-посадочной полосе, например, из-за трудно выявляемых экипажем отклонений в работе датчиков системы автоматического управления двигателем или неисправности канала регулирования входного направляющего аппарата компрессора, возможно пониженное значение частоты вращения ротора низкого давления, что и обуславливает потерю тяги двигателя. Особенно это характерно для современных турбореактивных двигателей с высокой степенью двухконтурности. Экипаж, выявив недобор тяги, например, по критерию медленного разгона самолета или по аварийной сигнализации, может осуществить прерванный взлет. Однако электродвигатель реверсивного устройства будет работать не на максимальной мощности, т.к. частота вращения ротора низкого давления параметра имеет низкий уровень. В конечном итоге это может привести к позднему включению реверса на максимальной обратной тяге и, в сочетании с другими факторами и отказами, к недопустимым последствиям.
Наиболее близким по технической сущности и совокупности операций к заявляемому изобретению является способ управления реверсивным устройством авиационного двигателя при торможении самолета патент RU №2488706 (МПК F02C 9/00, опубл. 27.07.2013), заключающийся в том, что определяют приземление самолета по наличию сигналов обжатия опор шасси, после приземления переводят РУД на площадку «Минимальной обратной тяги», открывают механический замок реверсивного устройства, после его открывания формируют управляющее воздействие на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», диагностируют положение подвижных элементов реверсивного устройства с помощью, по меньшей мере, одного датчика положения подвижных элементов реверсивного устройства, формируют информационный сигнал в электронный регулятор и в кабину экипажа «Реверсивное устройство включено» после перевода подвижных элементов реверсивного устройства в положение «Обратная тяга», переводят РУД в положение «Максимальная обратная тяга» и автоматически устанавливают режим работы двигателя, соответствующий положению РУД; переводят РУД на площадку «Малый газ» после снижения скорости самолета ниже наперед заданной величины, формируют управляющее воздействие на перевод реверсивного устройства в положение «Прямая тяга», закрывают механический замок реверсивного устройства и переводят РУД в положение для выполнения руления самолета.
Кроме того, при переводе РУД на увеличения обратной тяги для гарантированной установки реверсивного устройства в положение «Обратная тяга» блокируют увеличение расхода топлива на наперед заданное время, определяемое расчетно-экспериментальным путем (~ на 0,5…1 с для двигателя типа ПД-14).
Кроме того, в процессе торможения самолета с помощью реверсивного устройства по наперед заданной зависимости от измеренной скорости самолета уменьшают расход топлива в камеру сгорания двигателя.
Согласно описания прототипа управление реверсивным устройством двигателя осуществляют предложенной электронно-гидромеханической системой автоматического управления, в состав которой входит электронный регулятор двигателя, комплект датчиков двигательных параметров, включая датчик положения РУД, частоты вращения роторов, температуры газов и т.д., датчик скорости самолета, блок исполнительных элементов. Электронный регулятор двигателя представляет собой специализированную вычислительную машину из состава цифровой системы управления типа FADEC.
К основным недостаткам способа управления реверсивным устройством авиационного двигателя, выбранного за прототип, относится:
1. Наличие блокировки увеличения расхода топлива в камеру сгорания двигателя для формирования максимальной обратной тяги.
Наличие блокировки увеличения расхода топлива после перевода РУД на режим «Увеличение обратной тяги» на уровне 0,5…1 секунды является крайне нежелательным для условий прерванного взлета, т.к. приводит к более позднему формированию максимальной обратной тяги, когда необходимо экстренное включение реверсивного устройства и торможение самолета, например, в ситуации, когда на взлетно-посадочной полосе возникло внешнее препятствие или произошел критический отказ авиационного оборудования, пожар на борту. Каких-либо ограничений по применению данной блокировки для условий прерванного взлета в тексте прототипа не оговаривается, как и отсутствует сама идентификация прерванного взлета.
2. Возможно наличие неуправляемости авиационного двигателя.
Как следует из описания работы устройства, реализующим данный способ, в прототипе предусмотрено автоматическое снижение расхода топлива в камеру сгорания в процессе торможения самолета по наперед заданной зависимости от измеренной скорости самолета. Но подобные программы регулирования могут привести к неуправляемости двигателя и даже к недопустимому самопроизвольному изменению режима работы двигателя в ситуации, когда у экипажа возникнет необходимость увеличить режим работы двигателя, например, для прекращения режима посадки и уходе на второй круг, а вышеуказанная программа предписывает автоматическое снижение расхода топлива в камеру сгорания.
Технической проблемой, решение которой обеспечивается только при осуществлении предлагаемого изобретения и не может быть реализовано при использовании прототипа, является недостаточная эффективность алгоритма включения реверсивного устройства при прерванном взлете самолета, недостаточная безопасность полета при торможении самолета в условиях посадки или прерванного взлета.
Технической задачей изобретения является повышение надежности работы газотурбинного двигателя, повышение безопасности полета при посадке и прерванном взлете самолета, снижение времени формирования максимальной обратной тяги двигателя в условиях прерванного взлета.
Это возможно за счет:
достоверной, своевременной и автоматической идентификации режима прерванного взлета самолета, осуществляемой в электронном регуляторе двигателя, на основе информации о действиях экипажа по перемещению РУД, наличии касания опор шасси самолета взлетно-посадочной полосы и использовании информационного сигнала релейного типа «Скорость самолета не превышает скорость принятия решения V1»;
- исключения блокировки увеличения расхода топлива в камеру сгорания для формирования максимальной обратной тяги;
- исключения неуправляемости двигателя и/или исключения самопроизвольного изменения режима работы двигателя.
Техническая проблема решается тем, что в способе управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета, заключающемся в том, что определяют приземление самолета по наличию сигналов обжатия опор шасси, переводят РУД на площадку «Минимальной обратной тяги», открывают механический замок реверсивного устройства, после его открывания формируют управляющее воздействие на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», диагностируют положение подвижных элементов реверсивного устройства с помощью, по меньшей мере, одного датчика положения подвижных элементов реверсивного устройства, формируют информационный сигнал в электронный регулятор и в кабину экипажа «Реверсивное устройство включено» после перевода подвижных элементов реверсивного устройства в положение «Обратная тяга», переводят РУД в положение «Максимальная обратная тяга» и автоматически устанавливают режим работы двигателя, соответствующий положению РУД; переводят РУД на площадку «Малый газ» после снижения скорости самолета ниже наперед заданной величины, формируют управляющее воздействие на перевод реверсивного устройства в положение «Прямая тяга», закрывают механический замок реверсивного устройства и переводят РУД в положение для выполнения руления самолета, согласно изобретению, дополнительно формируют наперед заданное предельное значение τпред времени перемещения РУД из положения «Максимальный режим» в положение включения реверсивного устройства, в процессе разбега самолета по взлетно-посадочной полосе на взлетном режиме определяют (измеряют) текущее время τ перемещения РУД из положения «Максимальный режим» в положение включения реверсивного устройства, сравнивают текущее значение времени τ перемещения РУД с предельным значением τпред, определяют наличие информационного сигнала релейного типа «Скорость самолета не превышает скорость принятия решения V1»; в случае, если текущее значение времени τ перемещения РУД меньше предельного значения τпред, информационный сигнал «Скорость самолета не превышает скорость принятия решения V1» присутствует, сигнал обжатия опор шасси самолета присутствует, то осуществляют перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», при этом величину обратной тяги формируют в соответствии с заданным положением РУД.
Кроме того, согласно изобретению, формирование предельного значения τпред, определение τ времени перемещения рычага управления двигателем из положения «Максимальный режим» в положение включения реверсивного устройства, а также сравнение параметров τпред и τ осуществляют в электронном регуляторе газотурбинного двигателя.
Кроме того, согласно изобретению, в качестве предельного значения применяют константу τпред, равную 2 секундам.
Кроме того, согласно изобретению, формирование и передачу в электронный регулятор двигателя информационного сигнала «Скорость самолета не превышает скорость принятия решения V1» и информационного сигнала обжатия опор шасси самолета осуществляют в системе управления самолетным оборудованием.
Кроме того, согласно изобретению, передачу в электронный регулятор двигателя информационных сигналов из системы управления самолетным оборудованием осуществляют в последовательном коде.
Кроме того, согласно изобретению, передача информации в последовательном коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи.
Кроме того, согласно изобретению, в качестве датчика положения подвижных элементов реверсивного устройства используют датчик линейного перемещения штока электромеханизма или датчик угла поворота инкрементального или абсолютного типа.
Кроме того, согласно изобретению, датчик угла поворота инкрементального или абсолютного типа представляет собой резольвер, фотоимпульсный инкодер или датчик, работающий на эффекте Холла.
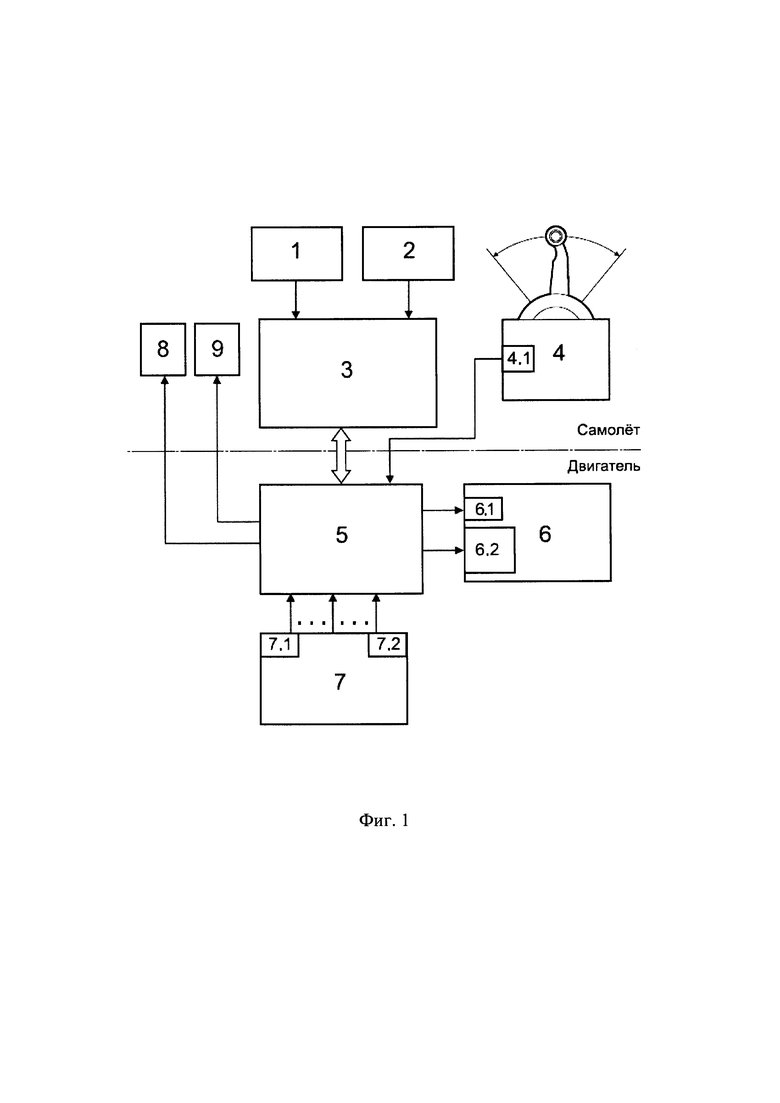
На фиг. 1 представлена блок-схема устройства для реализации заявляемого способа управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета.
Устройство содержит блок 1 датчиков-сигнализаторов обжатия опор (стоек) шасси самолета, датчик 2 приборной скорости самолета, система 3 управления самолетным оборудованием, рычаг 4 управления двигателем (РУД) с датчиком 4.1, измеряющим положение (угловое) РУД; электронный регулятор 5 газотурбинного двигателя, реверсивное устройство 6 газотурбинного двигателя, в состав которого входит электромеханизм 6.1 открытием / закрытием механического замка (не показан) и электропривод 6.2 перекладки подвижных элементов реверсивного устройства; блок 7 датчиков и сигнализаторов двигательных параметров, содержащий, в том числе, датчик-сигнализатор 7.1 положения механического замка реверсивного устройства и датчик 7.2 положения подвижных элементов реверсивного устройства. Устройство также содержит информационное табло 8 «Замок реверсивного устройства не закрыт» и информационное табло 9 «Реверсивное устройство включено», которые размещены в кабине экипажа.
Система 3 управления самолетным оборудованием предназначена для управления и контроля технического состояния общесамолетного оборудования, обеспечения экипажа и сопрягаемого оборудования необходимой информацией о состоянии систем самолета, например, таких как система управления уборкой и выпуском шасси, топливная система, маршевые газотурбинные двигатели, вспомогательная силовая установка, интегрированная система сбора, контроля, обработки и регистрации полетной информации, системы пожарной защиты, системы торможения колес, системы электроснабжения и т.д. Именно система 3 управления самолетным оборудованием формирует и передает в электронный регулятор 5 дискретный сигнал обжатия опор (стоек) шасси на основе данных блока 1 датчиков-сигнализаторов, также формирует и передает в электронный регулятор 5 дискретный сигнал «Скорость самолета не превышает скорость принятия решения V1» на основе сравнения измеряемой приборной скорости самолета и заранее заданной скорости принятия решения V1.
Скорость V1 - скорость принятия решения при взлете («TAKEOFF DECISION SPEED»). Это скорость разбега многомоторного самолета, на которой возможно безопасное прекращение взлета до полной остановки и безопасное продолжение взлета (даже при отказе двигателя). Скорость V1 для многомоторного самолета заранее определяется экипажем перед каждым взлетом при расчете полета. Обычно, приборная скорость самолета (Indicated Airspeed) и заданная скорость V1 индицируются на главном пилотажном дисплее (PFD) в кабине экипажа.
Система 3 является типовой для современной конструкции магистрального самолета, обмен информацией с электронным регулятором 5 осуществляется в последовательном коде.
Электронный регулятор 5 двигателя представляет специализированную цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации и формирования управляющих и информационных сигналов согласно заданных алгоритмов работы. Западным аналогом электронного регулятора 5 является электронный блок управления из состава цифровой системы управления, например, типа FADEC.
Реверсивное устройство 6 является решетчатым и находящимся в наружном контуре двигателя. Подобная конструкция реверсивного устройства является достаточно распространенной и, например, используется в двигателе ПС-90А для самолетов Ил-96-300 и Ту-204, в двигателе Д-18Т для самолета АН-124 «Руслан», в двигателе Rolls-Royce Trent 500 для самолета А340-500/600, в двигателе V2500 для самолета А320-100/200 и др. Но в более общем случае могут быть применены иные конструкции реверсивного устройства, например, створчатого или ковшового типа.
Датчик-сигнализатор 7.1 положения механического замка реверсивного устройства представляет собой типовой концевой переключатель.
В качестве датчика 7.2 положения подвижных элементов реверсивного устройства может быть использован датчик линейного перемещения штока электромеханизма, имеющим кинематическую связь с подвижным обтекателем, например, индукционного типа (LVDT - Linear variable differential transformers), оптического, лазерного, потенциометрического или иного типа. Также могут быть использованы датчики угла поворота инкрементального или абсолютного типа, например, резольверы, фотоимпульсные инкодеры или датчики, работающие на эффекте Холла.
Выход блока 1 подается на первый вход системы 3 управления самолетным оборудованием. Выход датчика 2 скорости соединен со вторым входом системы 3. Третий вход / выход системы 3 соединен по двунаправленной кодовой линии связи с электронным регулятором 5. Выход датчика 4.1 положения рычага 4 управления двигателем также соединен с вторым входом электронного регулятора 5. Второй выход электронного регулятора 5 соединен с электромеханизмом 6.1 механического замка (не показан) реверсивного устройства 6, а третий выход электронного регулятора 5 соединен с электроприводом перекладки подвижных элементов 6.2 реверсивного устройства 6.
Третий и последующие входы электронного регулятора 5 соединены с выходом блока 7 датчиков и сигнализаторов двигательных параметров. Четвертый выход электронного регулятора 5 подается на информационное табло 8 «Замок реверсивного устройства не закрыт», пятый выход электронного регулятора 5 подается на информационное табло 9 «Реверсивное устройство включено».
Способ реализуется следующим образом. В полете управление тягой газотурбинного двигателя обеспечивается путем перемещения рычага 4 управления двигателем в соответствующее положение. Угол положения РУД в течение всего полета (в воздухе и на земле) измеряется с помощью датчика 4.1 и анализируется в электронном регуляторе 5 двигателя для автоматического поддержания заданного уровня прямой и обратной тяги согласно заданным программам управления. В электронном регуляторе 5 также постоянно анализируется (контролируется) информация из системы 3 о состоянии обжатия / не обжатия опор шасси, превышении / не превышении скорости разбега самолета скорости принятия решения V1. Информация о состоянии опор шасси самолета и состоянии сигнала V1 передается из системы 3 в электронный регулятор 5 в кодовом виде (последовательном коде). Передача информации в последовательном коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи, но возможна передача информации и по беспроводной связи. Включение реверса тяги в воздухе заблокировано, так как механический замок реверсивного устройства 6 закрыт, а электронным регулятором 5 заблокировано формирование управляющего сигнала на включение реверса тяги из-за отсутствия сигнала об обжатии опор шасси самолета, что обусловлено нахождением самолета в воздухе.
После приземления самолета (касания самолетом взлетно-посадочной полосы), которое определяют по наличию соответствующих выходных сигналов из блока 1 датчиков-сигнализаторов обжатия опор (стоек) шасси и системы 3 для торможения самолета и автоматического включения реверсивного устройства экипаж переводит РУД 4 из положения полетный малый газ («Approach idle») или просто малый газ («idle») для включения реверсивного устройства. В результате этого формируется управляющий сигнал на электромеханизм 6.1 для открытия механического замка реверса, механический замок открывается, как следствие, срабатывает датчик 7.1 контроля (диагностики) положения механического замка реверсивного устройства, который также идентифицируется электронным регулятором как необходимое условие для включения реверса тяги. Одновременно с выхода электронного регулятора 5 формируется сигнал на информационное табло 8 «Замок реверсивного устройства не закрыт» в кабину экипажа для контроля за работой реверсивного устройства.
Кроме того, перемещение РУД постоянно регистрируется электронным регулятором 5. Перевод РУД в положение включения реверсивного устройства также является необходимым условием для включения реверса тяги и фактически признаком намерения экипажа начать торможение самолета с помощью реверсивного устройства. В результате на выходе электронного регулятора 5 формируют управляющее воздействие на электропривод 6.2 для перевода подвижных элементов реверсивного устройства 6 в положение «Обратная тяга».
При включении реверсивного устройства 6 его подвижный обтекатель сдвигается назад (на фиг. 1 не показан), открывая решетки с окнами для выхода воздуха из наружного контура ГТД. При этом створки реверсивного устройства также перемещаются и перекрывают канал наружного контура двигателя, что препятствует истечению газов наружного контура из сопла двигателя. Поток воздуха наружного контура тормозится створками, затем решетками реверсивного устройства направляется в сторону, противоположную движению самолета, тем самым создавая обратную тягу.
После перекладки реверсивного устройства и на основе данных, по меньшей мере, одного датчика 7.2, контролирующего положение подвижных элементов реверсивного устройства, на выходе электронного регулятора 5 формируется сигнал, который поступает на информационное табло 9 «Реверсивное устройство включено».
Величина обратной тяги также определяется положением РУД. После перемещения РУД на площадку «Максимальной обратной тяги» с помощью электронного регулятора двигателя происходит автоматическое увеличение режима работы газогенератора двигателя и величины обратной тяги до максимального значения и наиболее энергичное торможение самолета.
До достижения самолетом заранее заданной скорости пробега, на которой возможно попадание реверсивной струи газов в двигатель, экипаж переводит РУД в положение «Минимальной обратной тяги». Далее по мере необходимости реверсивное устройство выключают и на режиме малого газа прямой тяги обеспечивают руление самолета до стоянки.
В случае необходимости экстренного торможения при разбеге до достижения заданной скорости принятия решения V1, например, из-за неожиданно возникшей помехи на взлетной полосе, экипаж резко переводит рычаги управления всех двигателей из положения максимального (взлетного) режима («Мах Take-Off») в положение обратной тяги, т.е. в зону включения реверсивного устройства. Возникает ситуация прерванного взлета. В данном случае в электронном регуляторе 5 двигателя измеряется текущее время τ перемещения РУД из положения «Максимальный режим» в положение включения реверсивного устройства, также сравнивается текущее значение времени τ перемещения РУД из положения «Максимальный режим» в положение включения реверсивного устройства с предельным значением τпред, определяется наличие / отсутствие из системы 3 информационного сигнала «Скорость самолета не превышает скорость принятия решения V1» и информационного сигнала обжатия опор шасси самолета. В случае если текущее значение т времени перемещения РУД из положения «Максимальный режим» в положение включения реверсивного устройства меньше предельного значением τпред, информационный сигнал «Скорость самолета не превышает скорость принятия решения V1» присутствует, информационный сигнал обжатия опор шасси самолета присутствует, то осуществляют перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга» независимо от наличия сигнала «Реверсивное устройство включено».
Таким образом, перекладка реверсивного устройства при прерванном взлете происходит на режиме, близком к максимальному режиму работы двигателя. Очевидно, что в таком случае реверсивное устройство испытывает максимальные статические и динамические силовые нагрузки, обусловленные высоким уровнем аэродинамического давления воздушного потока в наружном контуре двигателя. Но в данной ситуации главное, что с наибольшим быстродействием обеспечивается максимальная обратная тяга и экстренное торможение самолета в пределах располагаемой дистанции прерванного взлета, а надежная работа реверсивного устройства обеспечивается его конструкцией.
Реализация заявляемой системы управления реверсом также может быть любой известной, например, электронно-электромеханической, электропневматической или электронно-гидромеханической. В предпочтительном варианте - электронно-электромеханической.
В качестве блока 3 может быть использована система СУОСО-МС-21 разработки акционерного общества «Ульяновское конструкторское бюро приборостроения», РФ.
В качестве электронного регулятора 5 может быть применен, например, российский электронный регулятор двигателя РЭД-14 разработки АО «ОДК-Стар», РФ. Электронный регулятор РЭД-14 представляет собой специализированный многопроцессорный цифровой вычислительный комплекс, работающий в реальном масштабе времени.
Конструктивно электронный регулятор РЭД-14 выполнен в виде моноблока прямоугольного сечения, который размещается на корпусе двигателя.
В электронном регуляторе 5 типа РЭД-14 происходит измерение угла поворота РУД, параметров температуры и давления воздуха на входе в двигатель, а также измерение внутридвигательных параметров, таких, например, как частота вращения роторов двигателя, угол поворота входного направляющего аппарата компрессора, температура газов за турбиной низкого давления и др. Также в РЭД-14 осуществляется контроль входных информационных (дискретных) сигналов. Кроме того, электронный регулятор взаимодействует с самолетной системой управления типа СУОСО, которая формирует информационные кодовые сигналы об обжатии опор шасси самолета, сигнал о превышении/не превышении скорости самолета заданной скорости принятия решения V1 и др. На основе полученной входной информации, в том числе по последовательному коду типа ARINC-429, электронный регулятор двигателя в соответствии с заложенными программами управления обеспечивает управление расходом топлива в камеру сгорания двигателя, регулирование положением входных направляющих аппаратов компрессора, включение и выключение клапанов перепуска воздуха, включение и выключение реверсивного устройства двигателя и др., что и обеспечивает в конечном итоге необходимый уровень реактивной тяги двигателя.
В качестве датчика измерения угла поворота РУД могут быть использованы известные датчики углового перемещения, например, синусно-косинусные вращающиеся трансформаторы типа ДБСКТ, но предпочтительно применять индукционные датчики типа RVDT - Rotary Variable Differential Transformer (по одному датчику для каждого канала регулятора), связь датчиков RVDT с РУД механическая. Датчики располагают непосредственно в блоке рычагов управления двигателями, размещенном на центральном пульте управления в кабине экипажа. Каждому угловому положению РУД соответствует определенное значение угла поворота RVDT.
На фиг. 2 представлено перемещение рычага управления двигателем по основным эксплуатационным режимам работы двигателя. Формирование максимального режима работы двигателя при взлете самолета осуществляется, как правило, после перевода РУД с площадки «Малый газ» на площадку «Максимальный режим». Включение реверсивного устройства и формирование обратной тяги осуществляется после перевода РУД в диапазон от минимальной обратной тяги до максимальной обратной тяги.
На фиг. 3 представлен примерный график изменения величины обратной тяги двигателя в зависимости от установленного режима работы двигателя при включенном реверсивном устройстве.
Для обеспечения прерванного взлета самолета пилоту достаточно перевести РУД из положения «Максимальный режим» в зону обратной тяги за время не более 2 секунд, например, на площадку «Минимальная обратная тяга», затем, при необходимости, довести РУД до площадки «Максимальная обратная тяга». В случае, когда требуется осуществить прерванный взлет с максимально энергичным торможением самолета, летчику необходимо сразу перевести РУД из положения «Максимальный режим» на площадку «Максимальная обратная тяга» за время не более 2 секунд. При этом, в обоих вышеуказанных случаях, для экстренного включения реверсивного устройства согласно изобретения в электронный регулятор двигателя должен поступать информационный сигнал «Скорость самолета не превышает скорость принятия решения V1», также должен присутствовать информационный сигнал обжатия опор шасси самолета.
Специалистам в области авиационного двигателестроения ясно, что рассмотренные в настоящем заявляемом способе действия экипажа по перемещению РУД обычно оговариваются в руководстве по эксплуатации двигателя и самолета.
Необходимо отметить, что в случае, если время перевода РУД из положения «Максимальный режим» в положение «Минимальная обратная тяга» или «Максимальной обратной тяги» или иной промежуточный режим обратной тяги превысит 2 секунды, то управляющая команда из электронного регулятора 5 на увеличение режима работы газогенератора двигателя для обеспечения максимальной обратной тяги произойдет только после формирования в электронном регуляторе информационного сигнала «Реверсивное устройство включено»
В качестве датчика - сигнализатора положения механического замка реверсивного устройства могут быть использованы любые известные типы переключателей российского производства типа ПКТ-6М-2С и/или западного типа FT8377937 компании «Crouzet» (Франция). Указанные сигнализаторы представляет собой нормально разомкнутую контактную группу. При нажатии на подвижный шток сигнализатора элементами конструкции замка происходит замыкание контактной группы внутри сигнализатора и выдается сигнал +27 Вольт в электронный регулятор типа РЭД-14 или иную систему управления реверсом.
В качестве датчика положения подвижного элемента реверсивного устройства могут быть использованы датчик линейного перемещения штока электромеханизма или датчик угла поворота инкрементального или абсолютного типа, например, резольвер, фотоимпульсный инкодер или датчик, работающий на эффекте Холла.
В качестве датчика 2 приборной скорости самолета может быть использован любой известный современный тип аэрометрического датчика приборной скорости самолета (Indicated Airspeed), работающего на основе измерения скоростного (динамического) напора воздуха, функционально связанного со скоростью движения самолета. В частности, могут быть применены многофункциональные измерители воздушных данных с приемниками воздушного давления типа ПВД-40 или типа ППД-1М, которые по конструкции представляют собой типичные трубки Прандтля-Пито.
В качестве электропривода 6.2 может быть применен электропривод по типу RU №175530 (МПК: F02K 1/76, B64D 29/00, B64D 31/00, опубл. 07.12.2017), в качестве электромеханизма - электромеханизм поступательного действия по типу RU №2531208 (МПК H02K 7/116, В64С 13/50, опубл. 20.10.2014). В качестве датчиков-сигнализаторов обжатия стоек шасси из состава блока 1 могут быть использованы любые известные устройства, например, концевые выключатели типа АМ800К, тензодатчики, индуктивные датчики перемещения, системы сигнализации типа «WoW» (weight-on-weels - вес на колесах).
Заявляемый способ успешно прошел апробацию и обеспечил проведение различных типов стендовых и летных испытаний авиационного двигателя типа ПД-14 (головной разработчик АО «ОДК-Авиадвигатель», РФ), укомплектованного электронным регулятором двигателя типа РЭД-14 и электромеханическим приводом реверсивного устройства.
Таким образом, предлагаемое изобретение с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволяет повысить надежность работы двигателя и безопасность полета при торможении самолета с включением реверсивного устройства как при штатной посадке, так и в условиях прерванного взлета на основе достоверной, своевременной и автоматической идентификации режима экстренного останова самолета, осуществляемой в электронном регуляторе двигателя.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ АВИАЦИОННОГО ДВИГАТЕЛЯ ПРИ ТОРМОЖЕНИИ САМОЛЕТА | 2019 |
|
RU2719778C1 |
| Способ управления газотурбинным двигателем при самопроизвольном открытии реверсивного устройства | 2021 |
|
RU2774010C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2019 |
|
RU2726491C1 |
| Способ включения реверсивного устройства газотурбинного двигателя при посадке самолета | 2021 |
|
RU2774011C1 |
| Способ управления перепуском воздуха из компрессора низкого давления турбореактивного двухвального двигателя с высокой степенью двухконтурности | 2024 |
|
RU2836207C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2488706C2 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2021 |
|
RU2783048C1 |
| Способ и устройство управления реверсированием тяги газотурбинного двигателя самолёта | 2024 |
|
RU2828300C1 |
| Электромеханическая система управления реверсивным устройством газотурбинного двигателя | 2020 |
|
RU2757949C1 |


Изобретение относится к области авиационного двигателестроения, в частности к способам управления реверсивным устройством (РУ) газотурбинного двигателя (ГТД) при торможении самолета в условиях посадки и прерванного взлета. Способ заключается в том, что определяют приземление самолета по наличию сигналов обжатия опор шасси, после приземления переводят рычаг управления двигателем (РУД) на площадку «Минимальной обратной тяги», формируют управляющее воздействие на перевод реверсивного устройства в положение «Обратная тяга», диагностируют положение подвижных элементов РУ с помощью по меньшей мере одного датчика положения, формируют информационный сигнал в электронный регулятор и в кабину экипажа «Реверсивное устройство включено» после перевода подвижных элементов РУ в положение «Обратная тяга», переводят РУД в положение «Максимальная обратная тяга» и автоматически устанавливают режим работы двигателя, соответствующий положению РУД; переводят РУД на площадку «Малый газ» после снижения скорости самолета, формируют управляющее воздействие на перевод РУ в положение «Прямая тяга», переводят РУД в положение для выполнения руления самолета. Дополнительно формируют наперед заданное предельное значение τпред времени перемещения РУД из положения «Максимальный режим» в положение включения РУ, в процессе разбега самолета по ВПП на взлетном режиме определяют (измеряют) текущее время τ перемещения РУД из положения «Максимальный режим» в положение включения РУ, сравнивают текущее значение τ перемещения РУД с предельным значением τпред, определяют наличие информационного сигнала «Скорость самолета не превышает скорость принятия решения V1»; в случае если текущее значение τ перемещения РУД меньше предельного значения τпред, информационный сигнал «Скорость самолета не превышает скорость принятия решения V1» присутствует, сигнал обжатия опор шасси самолета присутствует, то осуществляют перевод РУ из положения «Прямая тяга» в положение «Обратная тяга», при этом величину обратной тяги формируют в соответствии с заданным положением РУД независимо от наличия сигнала «РУ включено». Кроме того, формирование предельного значения τпред, определение τ времени перемещения РУД из положения «Максимальный режим» в положение включения РУ, а также сравнение τпред и τ осуществляют в РЭД ГТД, в качестве предельного значения применяют константу τпред, равную 2 с. Формирование и передачу в электронный регулятор сигнала «Скорость самолета не превышает скорость принятия решения V1» и сигнала обжатия опор шасси осуществляют в системе управления самолетным оборудованием. Изобретение позволяет повысить надежность работы ГТД и безопасность полета как при торможении самолета с включением РУ при штатной посадке, так и в условиях прерванного взлета на основе достоверной и автоматической идентификации режима экстренного останова. 7 з.п. ф-лы, 3 ил.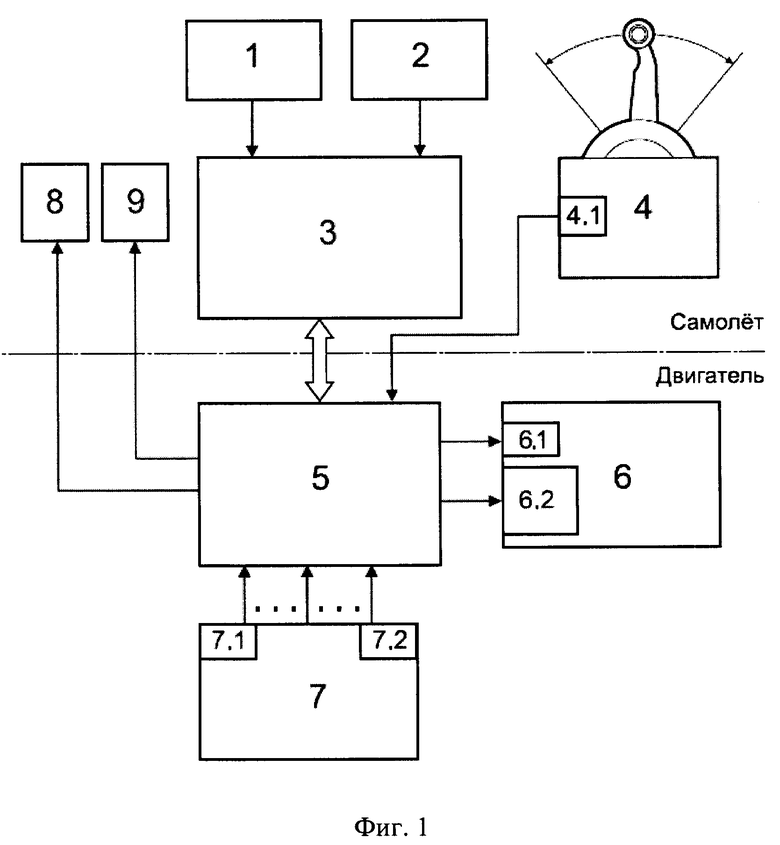
1. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета, заключающийся в том, что определяют приземление самолета по наличию сигналов обжатия опор шасси, после приземления переводят рычаг управления на площадку «Минимальной обратной тяги», открывают механический замок реверсивного устройства, после его открывания формируют управляющее воздействие на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», диагностируют положение подвижных элементов реверсивного устройства с помощью по меньшей мере одного датчика положения подвижных элементов реверсивного устройства, формируют информационный сигнал в электронный регулятор и в кабину экипажа «Реверсивное устройство включено» после перевода подвижных элементов реверсивного устройства в положение «Обратная тяга», переводят рычаг управления двигателем в положение «Максимальная обратная тяга» и автоматически устанавливают режим работы двигателя, соответствующий положению рычага управления; переводят рычаг управления на площадку «Малый газ» после снижения скорости самолета ниже наперед заданной величины, формируют управляющее воздействие на перевод реверсивного устройства в положение «Прямая тяга», закрывают механический замок реверсивного устройства и переводят рычаг управления двигателем в положение для выполнения руления самолета, отличающийся тем, что дополнительно формируют наперед заданное предельное значение τпред времени перемещения рычага управления двигателем из положения «Максимальный режим» в положение включения реверсивного устройства, в процессе разбега самолета по взлетно-посадочной полосе на взлетном режиме определяют (измеряют) текущее время τ перемещения рычага управления двигателем из положения «Максимальный режим» в положение включения реверсивного устройства, сравнивают текущее значение времени τ перемещения рычага управления двигателем с предельным значением τпред, определяют наличие информационного сигнала «Скорость самолета не превышает скорость принятия решения V1»; в случае, если текущее значение времени τ перемещения рычага управления двигателем меньше предельного значения τпред, информационный сигнал «Скорость самолета не превышает скорость принятия решения V1» присутствует, сигнал обжатия опор шасси самолета присутствует, то осуществляют перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», при этом величину обратной тяги формируют в соответствии с заданным положением рычага управления двигателем.
2. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета по п. 1, отличающийся тем, что формирование предельного значения τпред, определение τ времени перемещения рычага управления двигателем из положения «Максимальный режим» в положение включения реверсивного устройства, а также сравнение параметров τпред и τ осуществляют в электронном регуляторе газотурбинного двигателя.
3. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета по п. 2, отличающийся тем, что в качестве предельного значения применяют константу τпред, равную 2 с.
4. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета по п. 1, отличающийся тем, что формирование и передачу в электронный регулятор двигателя информационного сигнала «Скорость самолета не превышает скорость принятия решения V1» и информационного сигнала обжатия опор шасси самолета осуществляют в системе управления самолетным оборудованием.
5. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета по п. 4, отличающийся тем, что передачу в электронный регулятор двигателя информационных сигналов из системы управления самолетным оборудованием осуществляют в последовательном коде.
6. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета по п. 5, отличающийся тем, что передача информации в последовательном коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи.
7. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета по п. 1, отличающийся тем, что в качестве датчика положения подвижных элементов реверсивного устройства используют датчик линейного перемещения штока электромеханизма или датчик угла поворота инкрементального или абсолютного типа.
8. Способ управления реверсивным устройством газотурбинного двигателя при посадке и прерванном взлете самолета по п. 7, отличающийся тем, что датчик угла поворота инкрементального или абсолютного типа представляет собой резольвер, фотоимпульсный инкодер или датчик, работающий на эффекте Холла.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2488706C2 |
| Автоматический сцепной прибор для подвижного железнодорожного состава | 1931 |
|
SU30708A1 |
| US 5142860 A1, 01.09.1992. | |||

