Изобретение относится к области авиационного двигателестроения, в частности к способам управления реверсивным устройством газотурбинного двигателя (ГТД) при торможении самолета.
В настоящее время практически на всех типах пассажирских и транспортных самолетов с ГТД применяются реверсивные устройства, изменяющие направление реактивной струи двигателя на противоположное, создавая обратную тягу, обеспечивающие торможение самолета после посадки или в случае прерванного взлета самолета.
Известен способ управления реверсивным устройством турбореактивного двухконтурного двигателя, заключающийся в том, что после касания опор шасси самолета взлетно-посадочной полосы, которое определяют по одновременному наличию информационных сигналов «Левая опора шасси обжата» и «Правая опора шасси обжата», переводят рычаг управления двигателем (РУД) на площадку «Малый газ», далее переводят рычаг управления реверсом (РУР), шарнирно соединенным с РУД, на площадку «Минимальная обратная тяга», что обеспечивает выдачу первого управляющего воздействия на открытие механического замка реверса, также с помощью РУР через механическую систему тяг и рычагов выдают второе управляющее воздействие на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга». С помощью концевых переключателей определяют открытие механического замка реверсивного устройства и положение подвижных элементов реверсивного устройства, после открытия механического замка формируют информационный сигнал в кабину экипажа «Замок реверса открыт», после перевода реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга» формируют информационный сигнал в кабину экипажа «Реверс включен», переводят РУР в положение «Максимальная обратная тяга», что обеспечивает увеличение расхода топлива в камеру сгорания, и следовательно, величину обратной тяги газотурбинного двигателя («Авиационный двигатель ПС-90А» под редакцией Иноземцева А.А., изд. М.: Либра-К, 2007, стр. 101-112, стр. 183-197).
В результате включения реверсивного устройства на режим «Максимальная обратная тяга» происходит энергичное торможение самолета. При достижении самолета заранее заданной скорости пробега, при которой возможно попадание реверсивных струй газов в двигатель, экипаж переводит РУР в положение минимальной обратной тяги, далее по мере необходимости реверсивное устройство выключают и переводят двигатель на режим малого газа (прямой тяги) для руления самолета до стоянки.
К недостаткам аналога следует отнести:
- сложность гидромеханической системы управления реверсивным устройством; применение специального рычага управления реверсом тяги, а также механической системы тяг и рычагов для управления реверсивным устройством, что может снизить надежность включения реверса из-за возможных поломок, перекосов или заеданий механических элементов;
- риск позднего включения или не включения реверсивного устройства двигателя при посадке самолета из-за необходимости одновременного наличия информационных сигналов «Левая опора шасси обжата» и «Правая опора шасси обжата». Подобная ситуация возможна, например, в условиях минимальной весовой загрузки и/или приземлении самолета с креном (только на левую или правую опору шасси), что может вызвать несрабатывание или позднее срабатывание хотя бы одного из двух датчиков-сигнализаторов обжатия стойки шасси. В свою очередь позднее включение или не включение реверсивного устройства одновременно с поздним задействованием воздушной тормозной системы (спойлеров) и/или тормозов стоек шасси и в сочетании с неблагоприятными факторами (нестабилизированный заход на посадку, короткий размер взлетно-посадочной полосы, наличие на ней осадков и др.) может привести к выкатыванию самолета за пределы взлетно-посадочной полосы и разрушению самолета.
Другим аналогом, имеющим сходство по ряду признаков идентификации приземления самолета на взлетно-посадочную полосу, например, по наличию сигнала обжатия стоек шасси, параметру скорости колес главного шасси, и необходимых условий для включения реверсивного устройства, является Патент RU №2449153 (МПК F02K 1/76, опубл. 27.04.2012). Недостатком данного аналога является сложность алгоритма включения реверсивного устройства, необходимость применения системы управления полетом типа FMS (Flight Management System), предусматривающей заблаговременное задание уровня реверсированной тяги, что требует дополнительных трудозатрат экипажа, а в случае резкой смены погодных условий или непредвиденных отказов при посадке или особых ситуаций на полосе имеется риск нежелательных последствий.
Наиболее близким по конструктивной реализации и технической сущности к заявляемому изобретению является способ управления реверсивным устройством авиационного двигателя при торможении самолета Патент RU №2488706 (МПК F02C 9/00, опубл.27.07.2013), заключающийся в том, что электронным регулятором двигателя регулируют тягу газотурбинного двигателя, при этом автоматически блокируется выдача управляющих сигналов на включение реверсивного устройства при нахождении самолета в воздухе до момента касания взлетно-посадочной полосы, после касания самолетом взлетно-посадочной полосы, которое определяют по наличию информационных сигналов обжатия опор шасси, а именно по наличию сигналов «Левая опора шасси обжата» или «Правая опора шасси обжата», переводят рычаг управления двигателем на площадку минимальной обратной тяги, открывают механический замок реверсивного устройства, формируют управляющее воздействие на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», контролируют (диагностируют) положение реверсивного устройства с помощью датчика положения подвижных элементов реверсивного устройства, формируют информационный сигнал в кабину экипажа «Реверсивное устройство включено» после перевода реверсивного устройства в положение «Обратная тяга», переводят РУД в положение, необходимое для увеличения обратной тяги, и автоматически устанавливают режим работы двигателя, соответствующий положению РУД, далее реверсивное устройство выключают.
Согласно описания прототипа управление двигателем и его реверсивным устройством осуществляют электронно-гидромеханической системой автоматического управления, в состав которой входит электронный регулятор двигателя, комплект датчиков двигательных параметров, блок исполнительных элементов.
К основным недостаткам способа управления реверсивным устройством авиационного двигателем, выбранного за прототип, относится: - риск недостоверного (ложного) определения момента касания опор шасси самолета взлетно-посадочной полосы. Так в процессе полета самолета при возникновении ряда ситуаций, связанных, например, с коротким замыканием в цепи датчика-сигнализатора обжатия стойки шасси или с возникновением электромагнитной помехи из-за разряда молнии или статического электричества, возможно ложное формирование сигнала обжатия стойки шасси. Такой одиночный отказ создает предпосылку включения реверсивного устройства в воздухе, что снижает надежность работы двигателя и безопасность полетов. Поэтому возникает необходимость в наличие дополнительных сигналов, как подтверждающих необходимость включения реверсивного устройства, так и дублирующих (альтернативных) сигналов, диагностирующих приземление самолета;
- риск включения реверсивного устройства, когда самолет приземлился неустойчиво, т.е. на одну опору шасси (с креном). Подобная ситуация может возникнуть из-за сильного порывистого ветра или ошибки пилотирования и привести к преждевременному включению реверса тяги только одного двигателя и возникновению разворачивающего момента сил, как следствие сход самолета за боковые пределы полосы, что недопустимо.
- отсутствует контроль работоспособности блока, обеспечивающего перекладку реверсивного устройства, что также может привести к поломке двигателя из-за включения неисправного оборудования.
К недостатку работы также следует отнести то, что как следует из описания работы устройства, реализующим данный способ, в прототипе предусмотрено автоматическое снижение расхода топлива в камеру сгорания в процессе торможения самолета по наперед заданной зависимости от измеренной скорости самолета. Но подобные программы регулирования могут привести к неуправляемости двигателя и даже к недопустимому самопроизвольному изменению режима работы двигателя в ситуации, когда у экипажа возникнет необходимость увеличить режим работы двигателя, а вышеуказанная программа предписывает автоматическое снижение расхода топлива в камеру сгорания. Кроме того, в прототипе возникает необходимость в дополнительном датчике скорости самолета, что усложняет систему автоматического управления двигателя, увеличивает эксплуатационные затраты, связанные с технологической проверкой данного контура управления ГТД.
Технической проблемой, решение которой обеспечивается только при осуществлении предлагаемого изобретения и не может быть реализовано при использовании прототипа, является недостаточная надежность работы газотурбинного двигателя и безопасность полета при торможении самолета.
Технической задачей изобретения является повышение надежности работы газотурбинного двигателя и повышение безопасности полета при торможении самолета.
Это возможно за счет:
- повышения эффективности метода определения момента касания самолета взлетно-посадочной полосы;
- своевременного (безаварийного) включения реверсивного устройства;
- введения контроля исправности блока управления перекладкой реверсивного устройства;
- исключение неуправляемости двигателя и/или самопроизвольного изменения режима работы двигателя.
Техническая проблема решается тем, что в способе управления реверсивным устройством авиационного двигателя при торможении самолета, заключающемся в том, что электронным регулятором двигателя регулируют тягу газотурбинного двигателя, при этом автоматически блокируется выдача управляющих сигналов на включение реверсивного устройства при нахождении самолета в воздухе до момента касания взлетно-посадочной полосы, после касания самолетом взлетно-посадочной полосы, которое определяют по наличию информационных сигналов обжатия опор шасси, переводят рычаг управления двигателем на площадку минимальной обратной тяги, открывают механический замок реверсивного устройства, выдают управляющее воздействие на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», контролируют (диагностируют) положение реверсивного устройства с помощью датчика положения подвижных элементов реверсивного устройства, формируют информационный сигнал в кабину экипажа «Реверсивное устройство включено» после перевода реверсивного устройства в положение «Обратная тяга», переводят рычаг управления двигателем в положение, необходимое для увеличения обратной тяги, и автоматически устанавливают режим работы двигателя, соответствующий положению рычага управления двигателем, далее реверсивное устройство выключают, согласно изобретению, дополнительно формируют первый информационный сигнал «Две или три опоры шасси обжаты», второй информационный сигнал «Шасси обжаты», третий информационный сигнал «Обратная тяга», четвертый информационный сигнал «Блок управления перекладкой реверсивного устройства исправен»; момент касания самолета взлетно-посадочной полосы определяют при наличии первого информационного сигнала «Две или три опоры шасси обжаты» или второго информационного сигнала «Шасси обжаты», при этом перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга» осуществляют после установки рычага управления двигателем на площадку «Минимальная обратная тяга» и одновременном наличии информационных сигналов «Две или три опоры шасси обжаты» или «Шасси обжаты», «Замок реверсивного устройства не закрыт», «Блок управления перекладкой реверсивного устройства исправен».
Кроме того, согласно изобретению, формирование и передачу в электронный регулятор двигателя информационных сигналов «Две или три опоры шасси обжаты», «Шасси обжаты», «Обратная тяга» осуществляют в системе управления самолетным оборудованием.
Кроме того, согласно изобретению, формирование информационного сигнала «Две или три опоры шасси обжаты» в системе управления самолетным оборудованием осуществляют после обжатия двух или трех опор шасси самолета.
Кроме того, согласно изобретению, формирование информационного сигнала «Шасси обжаты» в системе управления самолетным оборудованием осуществляют с использованием датчика частоты вращения колеса передней стойки шасси самолета.
Кроме того, согласно изобретению, формирование информационного сигнала «Обратная тяга» в системе управления самолетным оборудованием осуществляют с использованием концевого переключателя, расположенного на рычаге управления двигателем.
Кроме того, согласно изобретению, передачу в двигатель информационных сигналов «Две или три опоры шасси обжаты», «Шасси обжаты», «Обратная тяга» из системы управления самолетным оборудованием осуществляют в последовательном коде.
Кроме того, согласно изобретению, передача информации в последовательном коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи.
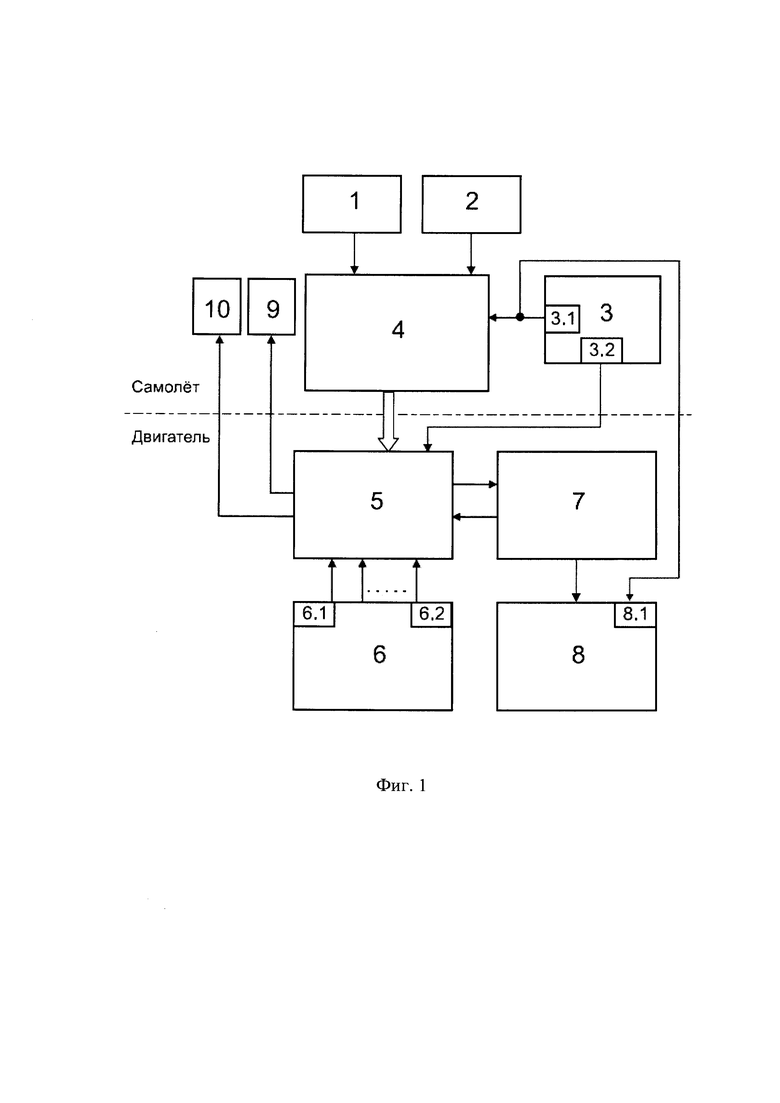
На фиг. 1 представлена блок-схема устройства для реализации заявляемого способа управления реверсивным устройством авиационного газотурбинного двигателя при торможении самолета.
Устройство содержит блок 1 датчиков-сигнализаторов обжатия стоек шасси самолета, датчик 2 частоты вращения колеса передней стойки шасси самолета, рычаг 3 управления двигателем (РУД) с размещенными на этом рычаге концевым переключателем 3.1 и датчиком 3.2, измеряющим угол положения РУД. Переключатель 3.1 представляет собой концевой переключатель для коммутации электрических цепей постоянного тока, а контакты этого концевого переключателя замыкаются при переводе РУД на площадку работы реверсивного устройства.
В состав устройства входит система 4 управления самолетным оборудованием (типа СУОСО), которая предназначена для управления и контроля технического состояния самолетного оборудования, обеспечения экипажа и сопрягаемого оборудования необходимой информацией о состоянии систем самолета, например, таких как система управления уборкой и выпуском шасси, топливная система, маршевые газотурбинные двигатели, системы пожарной защиты, системы торможения колес и т.д. Система 4 управления самолетным оборудованием принимает выходной дискретный сигнал от блока 1 и выходной частотный сигнал датчика 2 и передает в электронный регулятор 5 дискретные дублирующие информационные сигналы обжатия опор (стоек) шасси.
В состав устройства также входит электронный регулятор 5 двигателя, представляющий специализированную цифровую вычислительную машину, оснащенную устройствами ввода/вывода для получения входной информации и выдачи управляющих и информационных сигналов согласно заданных алгоритмов работы.
Кроме того, в состав устройства входит блок 6 датчиков и сигнализаторов двигательных параметров, содержащий, в том числе, датчик-сигнализатор 6.1 положения механического замка реверсивного устройства и датчик 6.2 положения подвижных элементов реверсивного устройства; блок 7 управления перекладкой реверсивного устройства, реверсивное устройство 8 двигателя, в состав которого входит электромеханизм 8.1 открытия/ закрытия механического замка (без позиции); информационное табло 9 «Замок реверсивного устройства не закрыт» и информационное табло 10 «Реверсивное устройство включено», которые размещены в кабине экипажа.
Выходы элементов 1, 2 подаются на вход системы 4 управления самолетным оборудованием, первый выход системы 4 по двунаправленной кодовой линии связи соединен с первым входом электронного регулятора 5. Выход концевого переключателя 3.1 соединен с одним из входов системы 4 и также соединен с электромеханизмом 8.1. Выход датчика 3.2 положения РУД соединен со вторым входом электронного регулятора 5. Входы электронного регулятора 5 также соединены с выходами блока бис первым выходом блока 7 управления перекладкой реверсивного устройства, на котором формируется информационный сигнал «Блок управления перекладкой реверсивного устройства исправен» в случае исправного состояния блока 7, данный сигнал поступает в электронный регулятор 5.
Второй выход электронного регулятора 5 соединен со входом блока 7 управления перекладкой реверсивного устройства, третий выход электронного регулятора 5 подается на информационное табло 9 «Замок реверсивного устройства не закрыт», четвертый выход электронного регулятора 5 подается на информационное табло 10 «Реверсивное устройство включено». Второй выход блока 7 соединен с реверсивным устройством 8.
Способ реализуется следующим образом. В полете управление реактивной тягой авиационного двигателя обеспечивается путем перемещения рычага 3 управления двигателем в необходимое положение. Угол положения РУД в течение всего полета измеряется с помощью датчика 3.2 и анализируется в электронном регуляторе 5 двигателя для автоматического поддержания заданного уровня тяги согласно заданным программам управления двигателем. В электронном регуляторе 5 двигателя также в течение всего полета постоянно контролируется исправное состояние блока 7 по наличию на входе в электронный регулятор 5 информационного сигнала «Блок управления перекладкой реверсивного устройства исправен», что является необходимым условием включения реверсивного устройства в работу. Включение реверса тяги в воздухе заблокировано, так как механический замок реверсивного устройства 8 закрыт, а электронным регулятором 5 автоматически заблокирована выдача управляющего сигнала на включение реверса тяги из-за отсутствия из системы 4 сигнала «Две или три опоры шасси обжаты» или сигнала «Шасси обжаты», что указывает на нахождение самолета в воздухе. Включение реверсивного устройства также блокируется, если РУД находится вне зоны работы реверсивного устройства, например, на площадке малого газа или полетного малого газа, а также из-за отсутствия сигнала «Обратная тяга» из системы 4 или отсутствия сигнала «Блок управления перекладкой реверсивного устройства исправен» из блока 7.
После приземления самолета и в момент касания двух и более опор шасси самолета взлетно-посадочной полосы на основе данных блока 1 датчиков-сигнализаторов обжатия стоек шасси в системе 4 управления самолетным оборудованием формируется информационный сигнал «Две или три опоры шасси обжаты», который поступает на вход электронного регулятора 5 двигателя. Кроме того, после снижения скорости самолет плавно опускается на переднюю стойку шасси. После касания передней стойкой шасси взлетно-посадочной полосы начинают вращаться колеса передней стойки шасси, что регистрируется датчиком 2 частоты вращения колеса передней стойки шасси и также приводит к формированию в системе 4 информационного сигнала «Шасси обжаты». Необходимо отметить, что сигнал «Шасси обжаты» является фактически дублирующим и альтернативным информационным сигналом (наряду с сигналом «Две или три опоры шасси обжаты»), диагностирующим приземление самолета. Наличие любого из вышеуказанных информационных сигналов на входе в электронный регулятор 5 создает необходимое, но не достаточное условие для автоматического включения реверсивного устройства.
Далее, для торможения самолета и автоматического включения реверсивного устройства 8 экипаж переводит РУД 3 из положения посадочный малый газ или малый газ в положение минимальной обратной тяги. В результате этого замыкаются контакты концевого переключателя 3.1, размещенного на РУД 3, сигнал поступает в систему 4 управления самолетным оборудованием и на выходе системы 4 формируется сигнал «Обратная тяга», который поступает на вход электронного регулятора 5 двигателя. Наличие сигнала «Обратная тяга» на входе в электронный регулятор также является необходимым условием для автоматического включения реверсивного устройства. Одновременно с выхода концевого переключателя 3.1 формируется управляющий сигнал на электромеханизм 8.1 для открытия/ закрытия механического замка реверсивного устройства, замок открывается, как следствие, срабатывает датчик-сигнализатор 6.1 положения механического замка реверсивного устройства, что также идентифицируется электронным регулятором 5 как необходимое условие для включения реверсивного устройства 8. Одновременно с выхода электронного регулятора 5 формируется сигнал на информационное табло 9 «Замок реверсивного устройства не закрыт» в кабину экипажа для оперативного контроля за работой реверсивного устройства.
Кроме того, перемещение РУД постоянно регистрируется электронным регулятором 5 двигателя. Перевод РУД в положение включения реверсивного устройства также является необходимым условием для включения реверса тяги и фактически признаком намерения экипажа начать торможение самолета. В случае одновременного появления на входе в электронный регулятор 5 двигателя информационного сигнала «Две или три опоры шасси обжаты» или информационного дублирующего сигнала «Шасси обжаты», наличии информационных сигналов «Обратная тяга», «Блок управления перекладкой реверсивного устройства исправен», «Замок реверсивного устройства не закрыт» и после перемещения РУД на площадку работы реверсивного устройства, на выходе электронного регулятора 5 автоматически формируется управляющее воздействие в блок 7 управления перекладкой реверсивного устройства для перевода реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга».
После перекладки реверсивного устройства и на основе данных датчика 6.2, контролирующего положение подвижных элементов реверсивного устройства, на выходе электронного регулятора 5 формируется сигнал, который поступает на информационное табло 10 «Реверсивное устройство включено». При этом величина обратной тяги определяется положением РУД. При переводе РУД на площадку максимальной обратной тяги с помощью электронного регулятора 5 происходит автоматическое увеличение расхода топлива в камеру сгорания и последующее увеличение режима работы двигателя, как следствие, увеличение обратной тяги до максимального значения и энергичное торможение самолета.
В конце послепосадочного пробега при скорости самолета, до возможного попадания реверсивных струй газов в двигатель, экипаж выключает реверсивное устройство последовательно перемещая РУД на площадку минимальной обратной тяги и далее на малый газ. В результате происходит перекладка реверсивного устройства в положение прямой тяги, далее механический замок закрывается, тем самым исключается самопроизвольное перемещение реверсивного устройства.
Реализация системы управления реверсом также может быть любой известной, например, электронно-электромеханической, электронно-гидромеханической, электрогидравлической или электропневматической с применением электронного цифрового устройства. В предпочтительном варианте система управления реверсом может быть электронно-электромеханической.
В качестве датчиков-сигнализаторов обжатия стоек (опор) шасси из состава блока 1 могут быть использованы любые известные устройства, например, концевые выключатели типа АМ800К, тензодатчики, индуктивные датчики перемещения, системы сигнализации типа «WoW» (weight-on-weels - вес на колесах).
В качестве датчика 2 частоты вращения колеса передней стойки шасси самолета могут быть использованы любые известные типы датчиков частоты вращения, в том числе магнитоэлектрические, индукционные, электромагнитные, фотоэлектрические и др.
В качестве электронного регулятора 5 может быть применен, например, электронный регулятор РЭД-14 разработки АО «ОДК-Стар», РФ, представляющий специализированную цифровую вычислительную машину, или аналогичный западный электронный регулятор типа FADEC (Full Authority Digital Engine Control system) с функциональной структурой по типу патента RU №2556474 (МПК F02K 1/76, опубл. 10.07.2015).
В электронном регуляторе 5 типа РЭД-14 происходит измерение угла поворота РУД, параметров температуры и давления воздуха на входе в двигатель, а также измерение внутридвигательных параметров, таких, например, как температура газов за турбиной низкого давления, частоты вращения роторов двигателя, угол поворота входного направляющего аппарата компрессора и др. Также в РЭД-14 осуществляется контроль входных информационных (дискретных) сигналов. Кроме того, электронный регулятор взаимодействует с самолетной системой управления, которая формирует информационные сигналы «Две или три опоры шасси обжаты», «Шасси обжаты», «Обратная тяга». На основе полученной входной информации, в том числе по последовательному коду типа ARTNC-429, электронный регулятор двигателя в соответствии с заложенными программами управления регулирует реактивную тягу двигателя, в том числе формирует управляющие воздействия на включение и выключение его реверсивного устройства.
Передача информации в последовательном коде из системы 4 в электронный регулятор 5 может осуществляться через витую и экранированную пару проводов или через волоконно-оптические линии связи.
В качестве концевых переключателей 3.1 и датчика-сигнализатора 6.1 могут быть использованы любые известные типы переключателей российского производства типа ПКТ-6М-2С и/или западного типа FT8377937 компании «Crouzet» (Франция). Указанные сигнализаторы представляет собой нормально разомкнутую контактную группу. При нажатии на подвижный шток сигнализатора элементами конструкции РУД или замка происходит замыкание контактной группы внутри сигнализатора и выдается сигнал +27 Вольт в соответствующий элемент блок-схемы согласно фиг. 1.
В качестве датчика 6.2 положения подвижных элементов реверсивного устройства может быть использован датчик линейного или углового перемещения, например, индукционного, оптического, лазерного, потенциометрического, магнитоэлектрического или иного типа, и имеющего кинематическую связь с подвижным элементом реверсивного устройства.
В качестве блока 7 управления перекладкой реверсивного устройства может быть применен, например, блок управления из состава электропривода реверсивного устройства по типу RU №175530 (МПК: F02K1/76, B64D 29/00, B64D 31/00, опубл. 07.12.2017) или блок управления из состава системы электрического управления по типу RU №2142569 (МПК F02K 1/76, опубл. 10.12.1999).
В качестве электромеханизма 8.1 открытия/ закрытия механического замка может быть использован электромагнит с необходимой величиной усилия, развиваемого на штоке электромагнита для надежного открывания механического замка. Принцип работы электромагнита заключается в следующем. При подаче напряжения питания на обмотку катушки электромагнита якорь под действием создаваемой электромагнитной силы, двигаясь поступательно, притягивается к полюсу корпуса и перемещается на заданной ход, воздействуя на механизм механического замка реверсивного устройства, механический замок открывается. При снятии напряжения питания якорь под действием пружины и внешней нагрузки возвращается в исходной положение, механический замок реверса закрывается. В качестве механического замка реверсивного устройства может быть применен замок по типу RU №2669452 (МПК: F02K 1/76, F02K 1/766, опубл. 11.10.2018).
Заявляемый способ был апробирован стендовыми испытаниями в составе системы автоматического управления авиационного турбореактивного двухконтурного двигателя. Испытаниями полностью подтверждена функциональная работоспособность, надежность и эффективность предлагаемого способа. Установлена эффективность работы заявляемого способа преимущественно для варианта двух, трех или четырехдвигательной силовой установкой самолета; трех или четырехопорной системой шасси (с передней опорой), при этом на передних колесах не должно быть системы предварительной раскрутки колес при посадке или должны быть предусмотрены мероприятия по исключению ложных данных датчика 2 частоты вращения колеса передней стойки шасси при работе заявляемого способа.
Таким образом, предлагаемое изобретение с вышеуказанными отличительными признаками, в совокупности с известными признаками, позволяет повысить надежность работы двигателя и безопасность полета при торможении самолета с включением реверсивного устройства, в том числе на основе информационных сигналов, достоверно и своевременно характеризующих приземление самолета и необходимость включения реверса тяги.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ ПРИ ПОСАДКЕ И ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2019 |
|
RU2730731C1 |
| Способ включения реверсивного устройства газотурбинного двигателя при посадке самолета | 2021 |
|
RU2774011C1 |
| Способ управления газотурбинным двигателем при самопроизвольном открытии реверсивного устройства | 2021 |
|
RU2774010C1 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2488706C2 |
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ НА ПРЕРВАННОМ ВЗЛЕТЕ САМОЛЕТА | 2024 |
|
RU2837365C1 |
| СПОСОБ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ УСТРОЙСТВОМ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 2019 |
|
RU2726491C1 |
| Электромеханическая система управления реверсивным устройством газотурбинного двигателя | 2020 |
|
RU2757949C1 |
| Способ и устройство управления реверсированием тяги газотурбинного двигателя самолёта | 2024 |
|
RU2828300C1 |
| Способ управления перепуском воздуха из компрессора низкого давления турбореактивного двухвального двигателя с высокой степенью двухконтурности | 2024 |
|
RU2836207C1 |
| МНОГОЦЕЛЕВОЙ ВЫСОКОМАНЕВРЕННЫЙ СВЕРХЗВУКОВОЙ САМОЛЕТ, ЕГО АГРЕГАТЫ ПЛАНЕРА, ОБОРУДОВАНИЕ И СИСТЕМЫ | 1996 |
|
RU2207968C2 |
Изобретение относится к области авиационного двигателестроения, в частности к способам управления реверсивным устройством газотурбинного двигателя при торможении самолета. Способ включает регулирование тяги электронным регулятором газотурбинного двигателя, автоматическое блокирование выдачи сигналов на управление положением реверсивного устройства (РУ) при нахождении самолета в воздухе до момента касания опор шасси самолета взлетно-посадочной полосы (ВПП); перемещение рычага управления двигателем (РУД) с площадки малого газа на площадку минимальной обратной тяги, открывание механического замка РУ и выдачу информационного сигнала «Замок РУ не закрыт». После его открывания формируют управляющее воздействие из электронного регулятора двигателя на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга». Выполняют диагностику положения створок реверсивного устройства и формирование информационного сигнала в кабину экипажа «РУ включено» после перевода створок реверсивного устройства в положение «Обратная тяга», переводят РУД в положение «Максимальная обратная тяга» и автоматическое установление режима работы двигателя, соответствующее положению РУД, далее РУ выключают. Дополнительно формируют первый информационный сигнал «Две или три опоры шасси обжаты», второй информационный сигнал «Шасси обжаты», третий информационный сигнал «Обратная тяга», четвертый информационный сигнал «Блок управления перекладкой реверсивного устройства исправен». Момент касания самолета ВПП определяют при наличии первого информационного сигнала «Две или три опоры шасси обжаты» или второго информационного сигнала «Шасси обжаты», при этом перевод створок РУ из положения «Прямая тяга» в положение «Обратная тяга» осуществляют после установки РУД на площадку «Минимальная обратная тяга» и при одновременном наличии информационных сигналов «Две или три опоры шасси обжаты» или «Шасси обжаты», «Замок реверсивного устройства не закрыт», «Блок управления перекладкой реверсивного устройства исправен». Изобретение позволяет повысить надежность работы двигателя и безопасность полета при торможении самолета с включением реверсивного устройства. 6 з.п. ф-лы, 1 ил.
1. Способ управления реверсивным устройством авиационного двигателя при торможении самолета, заключающийся в том, что электронным регулятором двигателя регулируют тягу газотурбинного двигателя, при этом автоматически блокируется выдача управляющих сигналов на включение реверсивного устройства при нахождении самолета в воздухе до момента касания взлетно-посадочной полосы, после касания самолетом взлетно-посадочной полосы, которое определяют по наличию информационных сигналов обжатия опор шасси, переводят рычаг управления двигателем на площадку минимальной обратной тяги, открывают механический замок реверсивного устройства, выдают управляющее воздействие на перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга», контролируют (диагностируют) положение реверсивного устройства с помощью датчика положения подвижных элементов реверсивного устройства, формируют информационный сигнал в кабину экипажа «Реверсивное устройство включено» после перевода реверсивного устройства в положение «Обратная тяга», переводят рычаг управления двигателем в положение, необходимое для увеличения обратной тяги, и автоматически устанавливают режим работы двигателя, соответствующий положению рычага управления двигателем, далее реверсивное устройство выключают, отличающийся тем, что дополнительно формируют первый информационный сигнал «Две или три опоры шасси обжаты», второй информационный сигнал «Шасси обжаты», третий информационный сигнал «Обратная тяга», четвертый информационный сигнал «Блок управления перекладкой реверсивного устройства исправен»; момент касания самолета взлетно-посадочной полосы определяют при наличии первого информационного сигнала «Две или три опоры шасси обжаты» или второго информационного сигнала «Шасси обжаты», при этом перевод реверсивного устройства из положения «Прямая тяга» в положение «Обратная тяга» осуществляют после установки рычага управления двигателем на площадку «Минимальная обратная тяга» и при одновременном наличии информационных сигналов «Две или три опоры шасси обжаты» или «Шасси обжаты», «Замок реверсивного устройства не закрыт», «Блок управления перекладкой реверсивного устройства исправен».
2. Способ управления реверсивным устройством авиационного двигателя при торможении самолета по п. 1, отличающийся тем, что формирование и передачу в электронный регулятор двигателя информационных сигналов «Две или три опоры шасси обжаты», «Шасси обжаты», «Обратная тяга» осуществляют в системе управления самолетным оборудованием.
3. Способ управления реверсивным устройством авиационного двигателя при торможении самолета по п. 2, отличающийся тем, что формирование информационного сигнала «Две или три опоры шасси обжаты» в системе управления самолетным оборудованием осуществляют после обжатия двух или трех опор шасси самолета.
4. Способ управления реверсивным устройством авиационного двигателя при торможении самолета по п. 2, отличающийся тем, что формирование информационного сигнала «Шасси обжаты» в системе управления самолетным оборудованием осуществляют с использованием датчика частоты вращения колеса передней стойки шасси самолета.
5. Способ управления реверсивного устройства авиационного двигателя при торможении самолета по п. 2, отличающийся тем, что формирование информационного сигнала «Обратная тяга» в системе управления самолетным оборудованием осуществляют с использованием концевого переключателя, расположенного на рычаге управления двигателем.
6. Способ управления реверсивным устройством авиационного двигателя при торможении самолета по п. 2, отличающийся тем, что передачу в двигатель информационных сигналов «Две или три опоры шасси обжаты», «Шасси обжаты», «Обратная тяга» из системы управления самолетным оборудованием осуществляют в последовательном коде.
7. Способ управления реверсивным устройством авиационного двигателя при торможении самолета по п. 6, отличающийся тем, что передача информации в последовательном коде осуществляется через витую и экранированную пару проводов или через волоконно-оптические линии связи.
| СПОСОБ УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2011 |
|
RU2488706C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИМЕНЕНИЯ РЕВЕРСОРОВ ТЯГИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2009 |
|
RU2449153C1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| CN 103979114 A, 13.08.2014 | |||
| Токарный резец | 1924 |
|
SU2016A1 |

