Настоящее изобретение относится к устройству и способу использования устройства для определения реологических свойств бетона.
В недавнем прошлом технология бетона продвинулась вперед к крайним границам: с одной стороны, сейчас можно изготавливать детали с чрезвычайными механическими и изгибными свойствами, заливать бетон, который сохраняет обрабатываемость в течение часов в самых жестких условиях, и обеспечивать очень высокие эксплуатационные характеристики в отношении срока службы и эстетики. С другой стороны, достижение таких крайних границ предполагает работу с материалом, с которым в возрастающей степени становится сложным обращаться, перемещать, перекачивать, заливать и подвергать окончательной обработке.
Для улучшения реологических свойств бетона, например самоуплотняющегося бетона, могут быть использованы добавки, такие как суперпластификаторы. Содержащий примеси на основе синтетических полимеров бетон обычно обозначается как "реопластичный бетон". Свойства бетона в свежем состоянии обычно характеризуются на месте проведения работ стандартизованными способами, такими как осадка конуса, расплыв и испытание на приборе Вебе. Полученные значения используются для описания как начальной текучести, так и сохранения обрабатываемости. Однако это способы не способны характеризовать реологические свойства бетона, которые могут оказывать значительное воздействие на его производство. От момента смешения до окончательной обработки поверхности через перекачивание и укладку реология играет ключевую роль в сроке службы конструкции, но ее количественная оценка в каждом шаге является непростой задачей.
Реология, по определению, является изучением потока вещества, прежде всего в жидком состоянии, но также в виде "мягких твердых веществ" или твердых веществах в условиях, в которых они отвечают на приложенную силу пластичным течением скорее, чем эластичной деформацией. Реология бетона как коллоидной системы может быть выражена моделью Бингхэма. Бингхэмовская жидкость является вязкопластичным материалом, который ведет себя как твердое тело при низких напряжениях, но течет как вязкая текучая среда при высоком напряжении. Предел текучести (τo) определяет значение, когда бетон начинает течь под действием собственной массы. Пластическая вязкость (μ) определяет время течения или скорость бетона во время заливки или перекачивания. Это значение указывает, как легко бетон может быть уложен или залит в формы.
Реометры для бетона выполняются так, чтобы характеризовать статический предел текучести, динамический предел текучести и пластическую вязкость бетона. Высокий предел текучести желателен, так как он уменьшает давление на опалубку и повышает сопротивление сегрегации. Однако для легкости перекачивания, укладки и самоуплотнения необходим низкий динамический предел прочности. Динамическая вязкость обеспечивает когезионную способность и вносит вклад в уменьшение сегрегации, когда бетон течет. До настоящего времени выполняемые в лаборатории и на стройплощадке испытания фокусировались на оценке обрабатываемости свежих цементных материалов путем измерения изменения осадки конуса или расплыва. Эти промышленные испытания в большинстве случаев напрямую коррелируют с пределом текучести. Хотя цементные материалы являются не только имеющими предел текучести текучими средами, этот прагматичный подход оправдывался фактом, что предел текучести часто является наиболее подходящим параметром для описания способности материала заполнять под действием собственного веса опалубку или в более общем смысле литьевую форму.
Последние тенденции в изменении состава смеси (уменьшение водовяжущего отношения, добавление твердых заполнителей и т.п.) показали, однако, драматические последствия в отношении обрабатываемости материала, и рабочие на строительной площадке часто жалуются на эти "липкие" бетоны, что их невозможно укладывать и подвергать их поверхность окончательной обработке. Эта "липкость" и, более конкретно, необходимое для обработки материала дополнительное напряжение связана не только с пределом текучести, но также и с пластической вязкостью. Следовательно, уменьшение как предела текучести (τo), так и пластической вязкости (μ) способствует улучшению реологических свойств бетона. Практическая оценка липкости и реологии обычно является сложной задачей, поскольку довольно сложно соотнести одно число с "воспринимаемым ощущением" реологии, которое имеют потребители.
Обычно реометр используется для измерения значений предела текучести и пластической вязкости, однако оба эти числа не так напрямую и легко коррелируют с измеренными на строительной площадке свойствами бетона, и обычно не все строительные площадки оснащены таким инструментом.
Поэтому существует потребность в улучшенных способах испытаний и устройствах, которые способны обеспечивать значимые результаты в отношении некоторых ключевых аспектов работы на строительной площадке, таких как укладка, вибрирование и окончательная обработка. Кроме того, поскольку эти способы и устройства должны использоваться не только в лаборатории, то и на строительной площадке, то эти приборы должны быть портативными. "Удобоукладываемость" здесь используется как мера легкости перемещения бетона после заливки.
На конференции, проведенной Европейской организацией производителей товарного бетона (European Ready Mixed Concrete Organization ERMCO) 4 и 5 июня 2015 в Стамбуле (Турция) заявителем настоящей заявки был представлен новый портативный инструмент с использованием системы шкивов для количественной оценки вращающего момента, необходимого для перемещения погруженной лопатки в бетоне. Присоединенная к подвижной тележке с колесами лопатка погружается в опалубку или ведро или контейнер, заполненные бетоном. Тележка с колесами присоединяется к шкиву посредством стальной проволоки. Сам шкив присоединен к оси реометра, который постоянно вращает шкив с заданной частотой вращения. Одновременно регистрируется измеренный реометром вращающий момент. В то время как это портативное устройство делает возможным более реалистическое определение свойств бетона благодаря факту, что перемещение лопатки в бетоне с большей точностью соотносится с выполняемыми рабочими манипуляциями с бетоном на строительной площадке, это портативное устройство все еще требует тщательной настройки разных компонентов и внешнего источника энергии, и поэтому используется главным образом в лаборатории и имеет лишь ограниченное использование на строительной площадке.
US 5,541,855 описывает портативное устройство для проверки свойств свежего или несхватившегося бетона или строительного раствора. GB 2092308 описывает портативный измеритель обрабатываемости бетона. В обоих устройствах согласно уровню техники используются вращающиеся зонды, которые погружены в бетон или строительный раствор. Соответственно, эти устройства по существу являются портативными ротационными реометрами и поэтому страдают такими же проблемами, как и обычные лабораторные реометры, когда дело касается определения реологических свойств бетона. Например, вращающийся зонд будет вызывать радиальную сегрегацию присутствующих в жидком бетоне частиц, искажая таким образом измеренные свойства. Кроме того, полученные с помощью вращающегося зонда результаты измерений недостаточно коррелируют с субъективным "ощущением", которое испытывает рабочий на строительной площадке при проверке свойства бетона вручную.
Поэтому лежащая в основе настоящего изобретения техническая проблема может рассматриваться как разработка улучшенного устройства и способа определения реологических свойств бетона, которые могут быть использованы на строительной площадке и которые не требуют каких-либо аналитических навыков от использующего устройство рабочего.
Эта техническая проблема решена устройством и способом определения реологических свойств бетона как определено в прилагаемых пунктах формулы изобретения.
Соответственно, настоящее изобретение относится к портативному ручному устройству для определения реологических свойств бетона, содержащему рукоять для ручной эксплуатации устройства, причем рукоять имеет передний конец и задний конец, лопатку, присоединенную без возможности вращения к переднему концу (13) рукояти, сенсорное средство для определения действующей на лопатку силы, электронный модуль для оценки собранных сенсорным средством данных и источник электроэнергии для сенсорного средства и электронного модуля.
Настоящее изобретение обеспечивает компактное, переносимое вручную устройство с автономным источником питания, которое может быть легко использовано на строительной площадке и не требует сложной настройки или тщательного обучения пользователя. Для выполнения Измерения пользователь должен всего лишь погрузить лопатку в бетон и взяться за рукоять для перемещения вручную погруженной лопатки в бетоне, в то время как регистрируется действующая на лопатку сила. Поэтому рукоять имеет наружную форму, которая может быть легко охвачена рукой пользователя.
Предпочтительно, рукоять выполнена наподобие продолговатой рукояти велосипедного руля, который имеет по существу цилиндрическую форму с круглым, эллиптическим или другим эргономически удобным поперечным сечением. Лопатка может быть присоединена к переднему концу рукояти напрямую или опосредованно через сенсорные средства, когда они предусмотрены на переднем конце рукояти или между передним концом рукояти и лопаткой. Предпочтительно, лопатка присоединена к рукояти через хвостовик. Когда рукоять выполнена как по существу цилиндрическая рукоять велосипедного руля, является предпочтительным, когда лопатка присоединена к переднему концу рукояти, в то время как электронный модель обеспечен на заднем конце рукояти для уравновешивания веса лопатки.
Поскольку лопатка присоединена к рукояти без возможности вращения, то действующая на лопатку во время перемещения в бетоне сила может приводить к действующему на лопатку давлению, которое может быть измерено с использованием имеющихся на рынке датчиков давления, или приводить к действующей на лопатку изгибающей силе, которая может быть измерена с использованием имеющихся на рынке датчиков силы.
В любом случае, не вращающаяся лопатка не вызывает радиальной сегрегации присутствующих в бетоне твердых частиц, так что измеренные с помощью устройства согласно изобретению свойства не изменяются самим процессом измерения. К тому же устройство согласно настоящему изобретению имитирует используемую рабочими на строительной площадке обычную штукатурную лопатку, так что измеренные данные могут быть соотнесены с испытываемыми рабочими субъективными "ощущениями" при проверке свойств бетона вручную.
Данные по измеренной штукатурной лопаткой силе могут быть соотнесены с реологическими свойствами, соответственно такими свойствами, как пластическая вязкость.
Предпочтительно, лопатка присоединена к рукояти с возможностью снятия, делая возможной замену лопатки. В одном варианте осуществления устройство содержит по меньшей мере две сменные лопатки, так что форма лопатки и/или площадь поверхности могут быть приспособлены к разным реологическим свойствам цементных материалов, таким как паста, строительный раствор, бетон и т.п.
В устройстве согласно изобретению могут быть использованы различные сенсорные средства для измерения действующей на лопатку силы. Например, на лопатке могут быть напрямую установлены известные из уровня техники датчики силы или давления. Датчики давления для измерения действующего на лопатку давления или датчики силы для измерения действующих на лопатку и/или хвостовик лопатки изгибающих сил используют тензометрические датчики, например резистивные тензометрические датчики (металлические или полупроводниковые тензометрические датчики) или пьезоэлектрический датчик.
Вследствие линейного перемещения лопатки во время измерения могут быть использованы одноосные тензометрические датчики. Однако в некоторых вариантах осуществления изобретения могут быть использованы многоосные тензометрические датчики для дополнительно определения отклонений от линейного перемещения, так что может быть включен предупреждающий сигнал, когда измерение может быть менее надежным вследствие неправильного обращения с устройством согласно изобретению.
В одном предпочтительном варианте осуществления сенсорное средство может содержать расположенную на переднем конце рукояти сенсорную головку. В этом случае лопатка жестко присоединена к сенсорной головке, и действующая на лопатку сила преобразуется в действующий на сенсорную головку момент вращения, например, через соединяющий лопатку с сенсорной головкой хвостовик. В одном предпочтительном варианте осуществления сенсорная головка содержит гибкую пластину, на которой через хвостовик жестко закреплена лопатка.
Действующая на лопатку во время перемещения в бетоне изгибающая сила приводит к действующему на гибкую пластину вращающему моменту, который вызывает деформацию, например изгиб, гибкой пластины. Деформация гибкой пластины приводит к деформации, которая, предпочтительно, затем может быть измерена с использованием описанного выше тензометрического датчика. Гибкая пластина может содержать монтажный кронштейн, который жестко, но с возможностью отсоединения прикрепляет хвостовик лопатки к гибкой пластине.
Электронный модуль для оценки собранных сенсорным средством данных может содержать электронную плату, которая, предпочтительно, выполнена для оценки максимальной силы и/или средней силы, прилагаемой к лопатке в течение времени ее перемещения. Дополнительно или факультативно, электронный модуль оценивает интеграл приложенной при перемещении на расстояние силы, то есть площадь под кривой "сила-расстояние" или "сила-время". Электронный модуль может также содержать средства накопления для хранения измеренных данных и/или интерфейс для передачи данных к внешнему компьютеру, например проводной интерфейс, такой как порт USB, или беспроводной интерфейс, такой как Bluetooth или WiFi интерфейс.
Предпочтительно, электронный модуль содержит дисплей. Дисплей имеет различную форму. В одном варианте осуществления дисплей может содержать экран, например LCD или OLED экран. Однако в жестких условиях окружающей среды строительной площадки обычно является предпочтительным простой и надежный дисплей. В одном варианте осуществления дисплей содержит цифровую индикацию для отображения оцененной приложенной к лопатке максимальной или средней силы и интеграла силы. Дополнительно или факультативно, дисплей может содержать один или несколько световых индикаторов, например один или более светодиодов (LEDs). Световые индикаторы может быть использованы для индикации состояния устройства согласно изобретению, но также могут показывать, находится ли измеренная сила в заданных приемлемых границах, что может индицироваться, например, соответственно посредством красного и зеленого светодиода.
Согласно одному предпочтительному варианту осуществления сенсорное средство или электронный модуль содержит акселерометр, предпочтительно 3-осевой акселерометр. Акселерометр может быть использован для определения отклонения устройства от вертикальной ориентации, прежде всего отклонения лопатки от ее вертикальной ориентации. Поскольку действующая на лопатку сила уменьшается, если лопатка не ориентирована перпендикулярно направлению перемещения, то данные от акселерометра могут быть использованы для вычисления эффективной площади лопатки в направлении перемещения и для вычисления соответствующим образом измеренных силовых данных. Дополнительно или факультативно к описанному выше многоосевому тензометрическому датчику, для определения отклонений от линейного перемещения лопатки могут быть использованы данные от акселерометра.
С устройством согласно изобретению могут быть использованы различные источники электроэнергии. Предпочтительно, используется встроенный источник питания, чтобы делать возможной действительно независимую портативную эксплуатацию. Для этой цели источник электроэнергии может содержать, например, перезаряжаемую или неперезаряжаемую батарею.
Настоящее изобретение также направлено на способ определения реологических свойств бетона с использованием описанного выше портативного ручного устройства. Способ согласно изобретению содержит шаги:
- полное погружение лопатки устройства в бетон, позволяя таким образом получать воспроизводимые результаты в последующих измерениях,
- перемещение лопатки вручную вдоль линейного пути в бетоне на предварительно заданное расстояние,
- измерение действующей на лопатку при ее перемещении в бетоне силы и сбор силовых данных,
- оценка измеренных силовых данные и отображение оцененных результатов.
Если лопатка погружена на полностью, на воспроизводимость результатов в последующих измерения оказывается негативное влияние. Является также предпочтительным, что лопатку удерживают вертикально, но, как объяснено выше, отклонения от вертикальной ориентации могут быть автоматически скорректированы, если используется содержащее акселерометр устройство.
Предпочтительно, силовые данные собирают через постоянные интервалы времени. Поскольку общее расстояние задано и предполагается, что лопатку перемещают по существу с постоянной скоростью, то постоянные интервалы времени по существу соответствуют интервалам расстояния, и площадь под кривой силы представляет собой израсходованную для перемещения в бетоне энергию.
Согласно предпочтительному варианту осуществления способа согласно изобретению эти силовые данные автоматически собирают, когда измеренная сила превышает заданный порог, упрощая таким образом работу устройства.
Расстояние, на которое лопатка должна перемещаться в бетоне во время измерения типично выбирают так, что лопатка может проходить расстояние без изменения оператором своего положения. Типичное удобное расстояние выбирают между 10 и 60 см, предпочтительно, примерно 30 см.
Типично оцененные результаты содержат максимальную силу и/или среднюю силу, полученную вдоль пути лопатки, и/или интеграл силовых данных, полученных во время перемещения лопатки. Эти результаты может быть показаны на предусмотренном на устройстве дисплее. Эти оцененные результаты и/или исходные данные могут быть также переданы через проводную или беспроводную информационную связь к неподвижному компьютеру или к подвижному вычислительному устройству, такому как планшетный компьютер или мобильный телефон.
Настоящее изобретение будет более подробно описано со ссылкой на предпочтительный вариант осуществления, показанный на прилагаемых чертежах.
На чертежах:
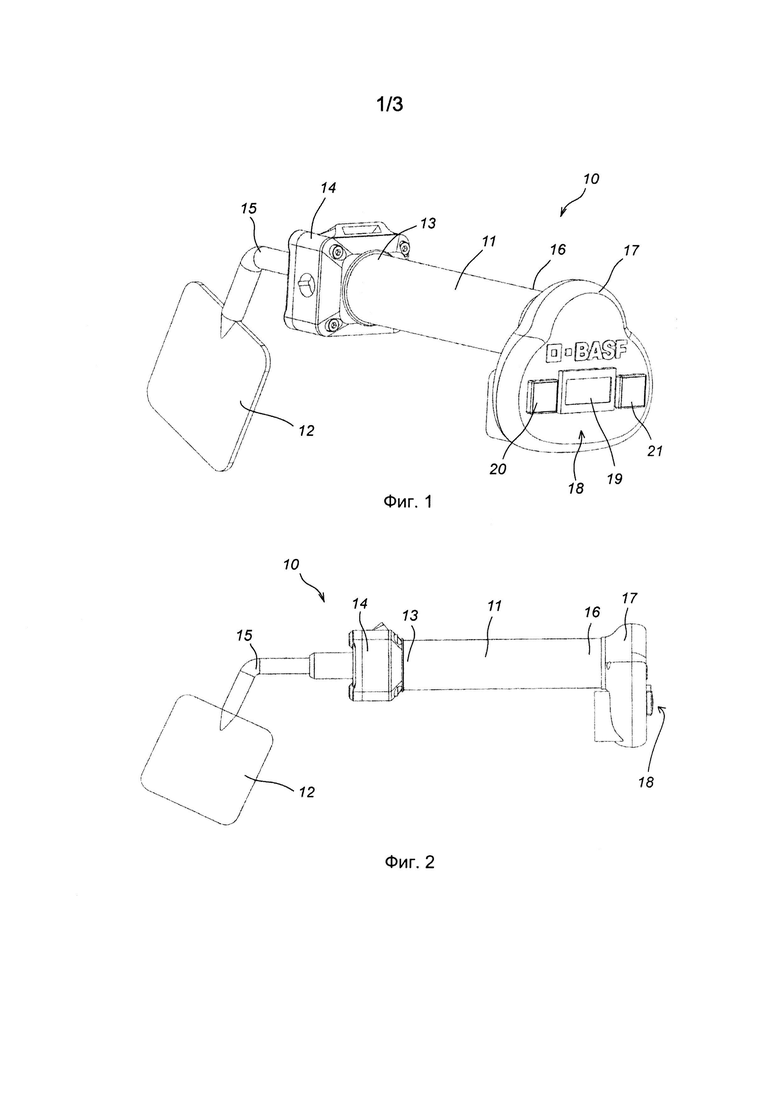
Фиг. 1 показывает вид в перспективе портативного ручного устройства для измерения реологических свойств бетона согласно изобретению,
Фиг. 2 показывает вид сбоку устройство согласно фиг. 1,
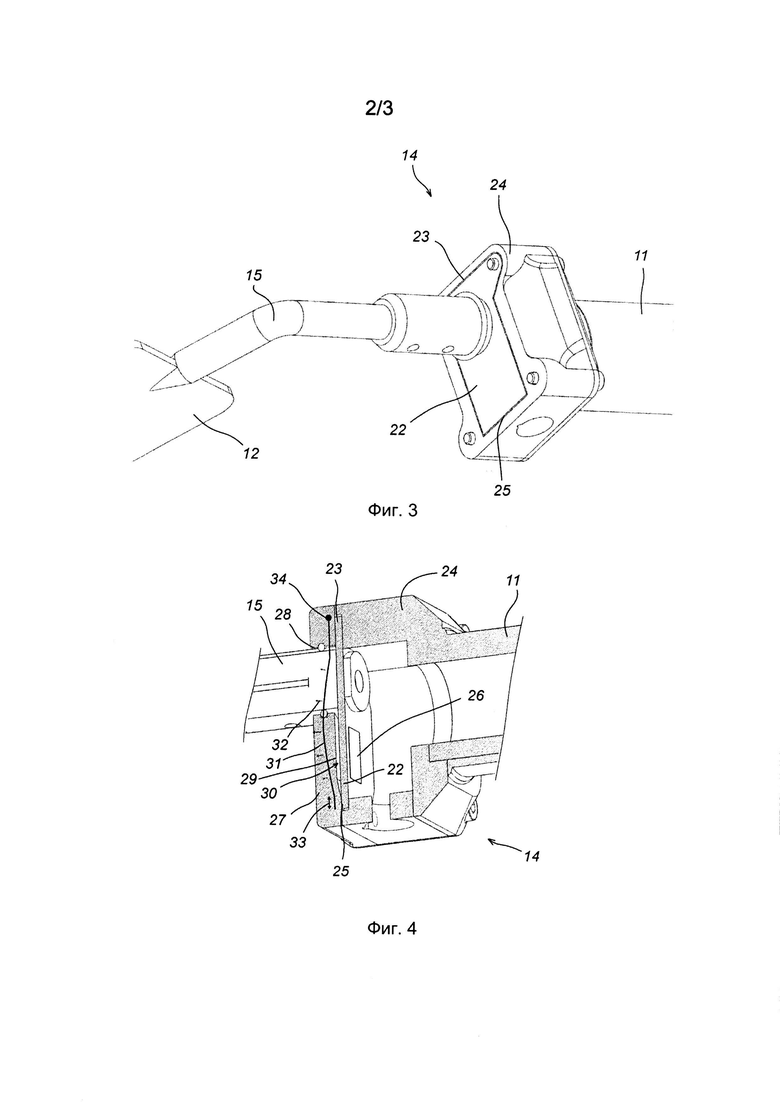
Фиг. 3 показывает увеличенный вид датчика силы устройства согласно фиг. 1 и 2,
Фиг. 4 показывает аксиальный вид в разрезе датчика силы согласно фиг. 3,
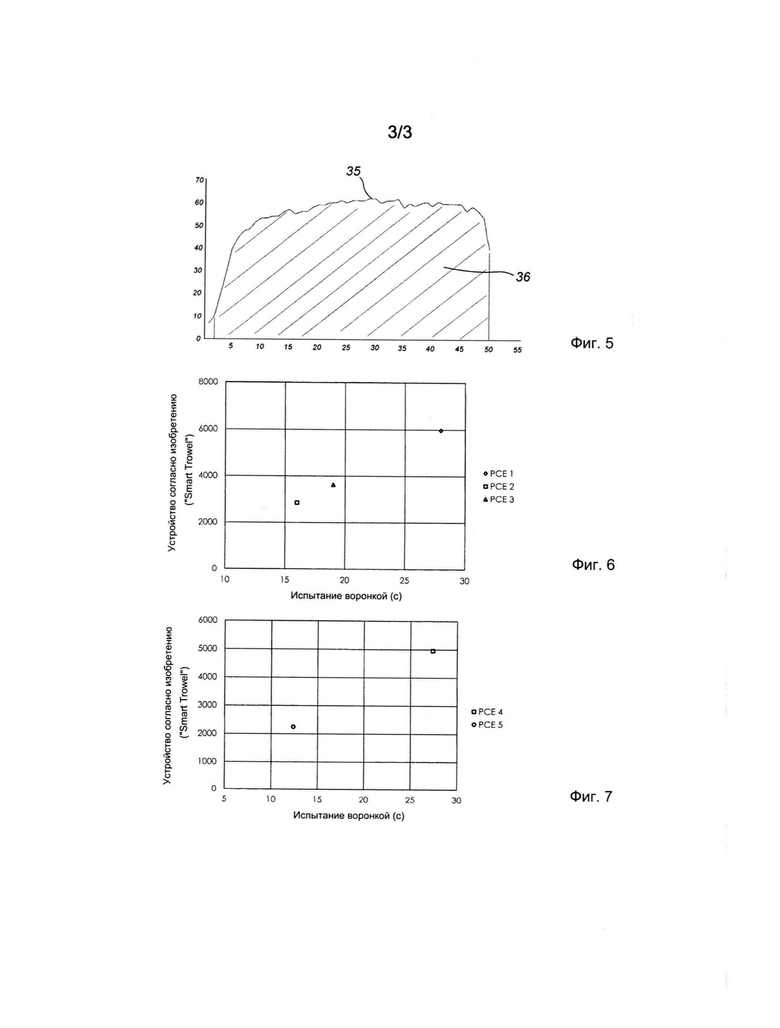
Фиг. 5 показывает пример измерения силы с использованием устройства согласно изобретению,
Фиг. 6 показывает корреляцию данных реологических свойств бетона первого типа, определенных обычным испытанием и с помощью устройства согласно изобретению, соответственно, и
Фиг. 7 показывает подобные приведенным на фиг. 6 данные для бетона второго типа.
На фиг. 1 показан предпочтительный вариант осуществления портативного ручного устройства согласно изобретению для определения реологических свойств бетона. В этом варианте осуществления устройство согласно изобретению имеет, в целом, конфигурацию ручной штукатурной лопатки 10. Подобно обычной штукатурной лопатке, штукатурная лопатка 10 согласно настоящему изобретению имеет рукоять 11 и присоединенную к рукояти 11 лопатку 12. На своем переднем конце 13 рукоять 11 содержит присоединенную к рукояти 11 сенсорную головку 14, к которой через хвостовик 15 с возможностью снятия присоединена лопатка 12. На ее заднем конце 16 рукоять 11 содержит электронный модуль 17, на котором предусмотрен дисплей 18. В показанном на фиг.1 варианте осуществления дисплей 18 содержит цифровой индикатор 19 и первый и второй светодиодные световые индикаторы 20, 21. Световые индикаторы 20, 21 могут быть использованы как показывающие правильные режимы работы устройства индикаторы состояния. Световые индикаторы могут быть также использованы для того, чтобы показывать, находятся ли реологические свойство бетона в заданных границах, например, соответственно посредством красного или зеленого света. В сенсорной головке 14 предусмотрен датчик силы, который может измерять действующую на лопатку 12 силу. Датчик силы будет более подробно описан ниже со ссылками на фиг. 3 и 4. В электронном модуле 17 предусмотрена электронная плата (на чертежах не показана), которая управляет дисплеем 18. В электронном модуле 17 и/или рукояти 11 также находится источник электроэнергии, который в данном случае состоит из двух элементов типа АА, которые могут быть перезаряжаемыми.
На фиг. 2 показан вид сбоку штукатурной лопатки 10 согласно фиг. 1.
Для определения реологических свойств бетона лопатку 10 используют следующие образом. После включения штукатурной лопатки 10 посредством выключателя (на чертежах не показан) система выполняет автоматическую калибровку аппаратного обеспечения датчика силы для калибровки данных в отношении температуры окружающей среды. После завершения начальной калибровки лопатку 12 полностью погружают в бетон, и оператор вручную выполняет линейное перемещение штукатурной лопатки 10 на предварительно заданное расстояние, обычно 30 см. С началом перемещения система автоматически начинает получать данные о действующей на лопатку силе. В одном предпочтительном варианте осуществления сенсорная головка 14 или электронная плата электронного модуля 17 также снабжена акселерометром, который делает возможным определение угла лопатки относительно ее вертикальной ориентации. Эти данные одновременно собираются во время перемещения штукатурной лопатки 10. Когда перемещение закончено, собранные данные интерполируются и значение средней и/или максимальной приложенной к лопатке силы отображается на цифровом индикаторе 19 электронного модуля 17.
Для определения силы, которая действует на лопатку 12 во время ее перемещения в бетоне, могут быть использованы различные типы известных из уровня техники датчиков силы.
В показанном на чертежах предпочтительном варианте осуществления для определения действующий на лопатку во время ее перемещения в бетоне силы используют датчик изгиба. Датчик изгиба преобразует измерение силы в измерение вращательного момента. Теперь будет более подробно описан этот тип измерения со ссылкой на фиг. 3 и 4.
Фиг. 3 является увеличенным видом сенсорной головки 14 штукатурной лопатки 10 согласно фиг. 1 и 2. На фиг. 4 показан вид в разрезе сенсорной головки 14.
Как можно понять из фиг. 3, лопатка 12 жестко соединена через хвостовик 15 с расположенной на переднем конце сенсорной головки 14 гибкой пластиной 22. Гибкая пластина 22 имеет неподвижную кромку 23, которая закреплена на корпусе 24 сенсорной головки 14. Противоположная кромка 25 гибкой пластины 22 может свободно перемещаться и действует в качестве плавающей кромки. Следовательно, действующая на погруженную лопатку 12 во время ее перемещения в бетоне сила передается жестким образом на гибкую пластину 22. Благодаря ее соответственно неподвижной и подвижной кромкам, гибкая пластина может свободно скользить и изгибаться в ответ на действующую на хвостовик 15 изгибающую силу. Перемещение гибкой пластины измеряется с использование датчика изгиба, например, как можно понять из вида в разрезе согласно фиг. 4, прикрепленного к нижней стороне гибкой пластины 22 тензометрического датчика 26. На фиг. 4 также показана передняя крышка 27, которая для наглядности на виде согласно фиг. 3 опущена. Крышка 27 снабжена отверстием 28, через которое может проходить с возможностью скольжения хвостовик 15. Крышка 27 расположена таким образом, что она не препятствует скользящему и изгибающему перемещению гибкой пластины 22 в пределах, необходимых для измерения ожидаемых сил/крутящих моментов. Для этой цели в показанном на фиг.4 варианте осуществления нижняя сторона 29 крышки 27 снабжена углублением 30, позволяющим гибкой пластине 22 изгибаться вверх в ответ на приложенный к хвостовику 15 крутящий момент, как показано линией 31, со стрелкой 32, показывающей изгибающее перемещение, и стрелкой 33, показывающей скользящее перемещение гибкой пластины 22, соответственно.
Неподвижная точка 34 показывает неподвижный конец линии 31 (то есть, пластины 22).
В показанном на фигурах предпочтительно варианте осуществления погруженная лопатка изготовлена из аустенитной стали AISI314, в то время как гибкая пластина изготовлена из пружинной стали 38Si7.
Перемещение гибкой пластины 22 вызывает изменение электрического сопротивления тензометрического датчика 26, которое считывается разным образом посредством предусмотренного на электронной плате электронного модуля 17 моста Уитстона. Соответственно, можно компенсировать ошибки, вызванные температурой окружающей среды и любыми присущими системе электрическими сопротивлениями. Выходной сигнал моста Уитстона передается в дифференциальный усилитель "rail to rail" (усилитель с размахом выходного напряжения, равным напряжению питания - прим. переводчика), позволяя таким образом компенсацию внесенных изменением напряжения батареи ошибок. Затем аналоговый сигнал считывается в аналого-цифровой преобразователь с 10-битным разрешением.
Для компенсации изменений в эффективной площади лопатки, когда она во время своего перемещения не удерживается вертикально, оцениваются данные 3-осевого акселерометра (который может быть предусмотрен в сенсорной головке 14 или на электронной плате электронного модуля 17), и силовые данные надлежащим образом корректируются для компенсации изменений в эффективной площади.
PIC процессор собирает цифровые данные и накапливает их до тех пор, пока к погруженной лопатке прилагается сила. Как только сила исчезает или снижается ниже заданного порога, данные пересчитываются с использованием измеренных значений угла инструмента, и вычисляется интеграл кривой, и соответствующие результаты отображаются на дисплее 18. Данные могут быть показаны как цифровые значения на цифровом индикаторе 19 и даже приблизительно через красный и зеленый светодиоды 20, 21, соответственно показывающие, находятся ли реологические свойства бетона в заданных границах или нет.
Дисплей 18 обычно показывает только данные последнего измерения. Эти данные могут быть стерты, когда выполняется новое измерение, однако в соответствии с предпочтительным вариантом осуществления электронная плата также содержит запоминающее устройство для данных и/или интерфейс (например, порт USB), позволяющий передачу данных к внешнему компьютеру (например, стационарному компьютеру, планшетному компьютеру или мобильному телефону) для детальной обработки и оценки. В этом случае сохраненные данные могут включать в себя не только сводные данные, такие как максимальная сила или интеграл по кривой силы измерения, но может также включать в себя все отдельные точки измерения.
На фиг. 5 показаны необработанные данные такого измерения. Погруженная лопатка вручную перемещалась в бетоне на расстояние примерно 30 см. Данные собирались каждые 0,05 с. На оси х каждая точка данных последовательно пронумерована, то есть показано суммарное время измерения приблизительно 2,5 с. По оси у показано сопротивления тензометрического датчика 26. Сопротивление может быть откалибровано в значениях действующей на лопатку силы, то есть кривая 35 показывает кривую, которая по существу соответствует действующей на лопатку 12 силе, в то время как лопатка 12 перемещается в бетоне. Заштрихованная площадь 36 под кривой 35 по существу соответствует затрачиваемой при перемещении лопатки в бетоне энергии. Сам дисплей 18 штукатурной лопатки 10 показывает только максимальную измеренную силу и/или общую площадь под кривой сила/время.
С устройством согласно изобретению можно определять реологические различия между бетонами, например, содержащими разные суперпластификаторы или разные количество суперпластификаторов бетонами, и измеренные данные коррелируют с ощущаемой оператором когезионной способностью. Чтобы показать эту корреляцию, устройство согласно изобретению было испытано путем сравнения измеренных со штукатурной лопаткой согласно фиг.1-5 силовых данных с полученные обычными реологическими испытаниями бетона данными.
Примеры
В нижеприведенных примерах добавки РСЕ 1, РСЕ 3, РСЕ 4 и РСЕ 6 являются сополимерами, изготовленными из винилоксибутил полиэтиленгликоль этоксилата и акриловой кислоты, в то время как РСЕ 2 и РСЕ 5 являются поликонденсатами, изготовленными из феноксиэтанол полиэтиленгликоль этоксилата, формальдегида и феноксиэтанолфосфата.
Пример 1
Первый тип бетона был получен из смеси 330 кг/м3 портландцемента (СЕМ I 45.5 R, Schwenk, Germany), 180 кг/м3 порошкообразной топливной золы (PFA) с 627 кг/м3 агрегатной смеси песка 0-2 мм, 336 кг/м3 гравия 2-8 мм и 672 кг/м3 гравия 8-16 мм. Было добавлено 150 л/м3 воды для получения равного 0,47 отношения вода/цемент. Полученный от BASF, Germany суперпластификатор поликарбоксилатный эфир (РСЕ) был добавлен в трех разных концентрациях для достижения одинаковой текучести (измеренной согласно EN 12350-8 осадки конуса):
РСЕ 1: 0,29% по массе относительно вяжущего (то есть, цемента + PFA)
РСЕ 2: 0,33% по массе относительно вяжущего (то есть, цемента + PFA)
РСЕ 3: 0,65% по массе относительно вяжущего (то есть, цемента + PFA)
Реологические свойства бетона проверяли с помощью устройства согласно изобретению. Три разных оператора перемещали штукатурную лопатку через заполненный бетоном резервуар на расстояние 30 см и определяли среднюю силу каждого измерения. Для каждой концентрации РСЕ каждый оператор выполнял три отдельных измерения, и эти результаты снова были усреднены. Для сравнения также проверялись реологические свойства бетона испытанием воронкой согласно стандарту EN 15 12350-9.
На фиг. 6 показана корреляция полученных из этих измерений данных с показанным на оси x в секундах временем истечения при испытании воронкой, и полученными с (обозначенным как "Smart Trowel") устройством согласно изобретению средними силовыми данными в произвольных единицах на оси у. Как можно из этого понять, данные испытания воронкой строго коррелируют с полученными с помощью устройства согласно изобретению силовыми данными.
Второй тип бетона был получен из смеси 400 кг/м3 портландцемента (СЕМ I 45.5 R, Schwenk, Germany), 50 кг/м3 порошкообразного известняка с агрегатной смесью 202,75 кг/м3 кварцевого песка 0-0,5 мм, 16,19 кг/м3 кварцевого песка 0-1 мм, 790,3 кг/м3 кварцевого песка 0-4 мм, 267,26 кг/м3 гравия 4-8 мм и 486,94 кг/м3 гравия 8-16 мм. Было добавлено 168 л/ м3 воды для получения равного 0,42 отношения вода/цемент. Полученный от BASF, Germany суперпластификатор поликарбоксилатный эфир (РСЕ) был добавлен в двух разных концентрациях:
РСЕ 4: 0,15% по массе относительно цемента
РСЕ 5: 0,32% по массе относительно цемента.
Были выполнены подобные описанным для первого типа бетона испытания, и результаты показаны на фиг. 7. Снова, полученные со штукатурной лопаткой согласно изобретению результаты коррелируют с результатами испытания воронкой.
Пример 2
Реологические свойства четырех разных бетонов были измерены соответственно с использованием устройства согласно настоящему изобретению и портативного ротационного реометра (ICAR 3000 распространяется Germann Instruments, Copenhagen, Denmark). Изменялись как отношение вода/цемент (w/c), так и тип суперпластификатора. Использовался дробленый каменный материал кремнистый известняк (песок и крупные частицы) вместе со смешанным с известняком быстрого кальцинирования цементом. Составы четырех бетонов и результаты испытания на осадку конуса согласно EN 12350-2 суммированы в таблице 1.
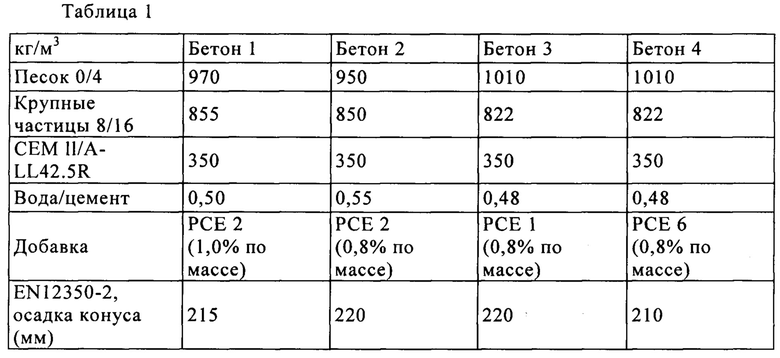
Как можно понять из таблицы 1, разные бетоны проявляют близкую консистенцию, насколько это касается испытания на осадку конуса.
Затем три разных оператора перемешивали согласно следующей процедуре.
Шаг 1: Каждый оператор перемещал бетон традиционной штукатурной лопаткой, оценивая четыре бетона согласно его ощущению относительно затраченной им энергии на перемешивание.
Шаг 2: Каждый оператор три раза проводил измерения для каждого бетона с помощью устройства (Smart Trowel) согласно изобретению.
Шаг 3: Измерение реологических свойств (предела текучести и пластической вязкости) с помощью реометра ICA R3000.
Результаты шагов 1, 2 и 3 суммированы соответственно в таблицах 2, 3 и 4.
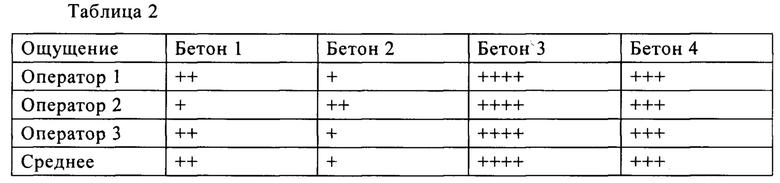
«+» = очень легко, «++» = легко, «+++» = трудно, «++++» = очень трудно
Как можно понять из таблицы 2, бетон 2 оказался самым легким в перемешивании, в то время как бетон 3 перемешивается труднее всех.
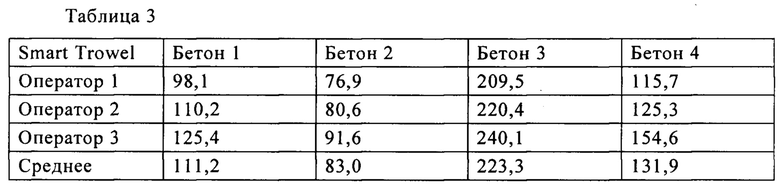
Полученные с помощью устройства (Smart Trowel) согласно изобретению результаты соответствуют субъективному рейтингу в описанной ранее оценке согласно таблице 2.
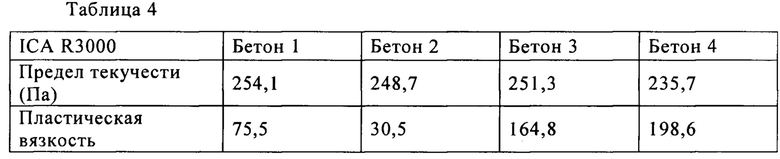
Как можно понять из таблицы 4, значения предела текучести почти одинаковы, соответствуя похожим свойствам консистенции (осадка конуса), как показано в таблице 1.
Также с использованием реометра ICAR бетон 4 был определен как более вязкий, чем бетон 3. Таким образом, измерение пластической вязкости с помощью ICAR не полностью согласуется с субъективными ощущениями рабочих на строительной площадке.
Этот пример ясно показывает, что устройство согласно настоящему изобретению более пригодно для измерений, которые коррелируют с субъективными ощущениями (чувствами) рабочих на строительной площадке, чем выполненные портативным ротационным реометром измерения.
ПЕРЕЧЕНЬ ССЫЛОЧНЫХ ОБОЗНАЧЕНИЙ
10 штукатурная лопатка
11 рукоять
12 лопатка
13 передний конец рукояти
14 сенсорная головка
15 съемный хвостовик
16 задний конец рукояти
17 электронный модуль
18 дисплей
19 цифровой индикатор
20 первый светодиодный индикатор
21 второй светодиодный индикатор
23 неподвижная кромка гибкой пластины
24 корпус
25 плавающая кромка гибкой пластины
26 датчик изгиба
27 крышка
28 отверстие
29 нижняя сторона крышки
30 углубление
31 приведенная в качестве примера линия изгиба
32 указывающая изгибающее перемещение стрелка
33 указывающая скользящее перемещение стрелка
34 неподвижная точка
35 кривая силы
36 площадь по кривой 35
| название | год | авторы | номер документа |
|---|---|---|---|
| БЕСПРОВОДНОЕ УПРАВЛЕНИЕ ДЛЯ ЧРЕСПИЩЕВОДНОЙ ЭХОКАРДИОГРАФИИ | 2019 |
|
RU2795943C2 |
| Пневмогидробур-пробоотборник внутрипочвенных экспресс-мониторинга, обработки и отбора проб почвы | 2025 |
|
RU2841266C1 |
| УСТРОЙСТВО ДЛЯ ОТДЕЛКИ И ВЫРАВНИВАНИЯ ПОВЕРХНОСТЕЙ | 2000 |
|
RU2179220C1 |
| ЗАГЛАЖИВАЮЩАЯ МАШИНА | 1992 |
|
RU2037616C1 |
| ОБОРУДОВАНИЕ ДЛЯ ЗАНЯТИЙ БОЕВЫМИ ИСКУССТВАМИ, СИСТЕМЫ И СПОСОБЫ ЕГО ИСПОЛЬЗОВАНИЯ | 2016 |
|
RU2703128C1 |
| СПОСОБ РЕЗКИ МАССИВА СЫРЦА ЯЧЕИСТОГО БЕТОНА | 2015 |
|
RU2623763C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ РЕОЛОГИЧЕСКИХ ХАРАКТЕРИСТИК ВЯЗКОУПРУГОПЛАСТИЧНЫХ СИСТЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2054648C1 |
| ИМПЕЛЛЕРНЫЕ ЧУВСТВИТЕЛЬНЫЕ ЭЛЕМЕНТЫ И СПОСОБЫ ИХ ИСПОЛЬЗОВАНИЯ | 2012 |
|
RU2547330C1 |
| УСТРОЙСТВО И СПОСОБ ПРОВЕРКИ ПАРАМЕТРА КОНСТРУКЦИИ | 2010 |
|
RU2513734C2 |
| СПОСОБ ВИРТУАЛЬНОЙ СИМУЛЯЦИИ РЕТРОГРАДНОЙ ИНТРАРЕНАЛЬНОЙ ХИРУРГИИ ДЛЯ ЛЕЧЕНИЯ МОЧЕКАМЕННОЙ БОЛЕЗНИ, ПРИМЕНЯЕМЫЙ ПРИ ОБУЧЕНИИ НАВЫКАМ ЭНДОУРОЛОГИЧЕСКИХ МАНИПУЛЯЦИЙ И ПРИ ПЛАНИРОВАНИИ ОПЕРАЦИЙ С ИСПОЛЬЗОВАНИЕМ ГИБКОГО УРЕТЕРОСКОПА | 2022 |
|
RU2802129C1 |
Изобретение относится к устройству и способу использования устройства для определения реологических свойств бетона. Портативная ручная штукатурная лопатка (10) содержит рукоять (11), лопатку (12), присоединенную без возможности вращения к переднему концу (13) рукояти (11), сенсорное средство (14) для определения действующей на лопатку (12) силы, электронный модуль (17) для оценки собранных сенсорным средством (14) данных, и источник электроэнергии для обеспечения электроэнергией сенсорного средства и электронного модуля. Способ включает в себя: полное погружение лопатки (12) в бетон, ручное перемещение лопатки (12) вдоль линейного пути в бетоне на предварительно заданное расстояние, выбранное между 10 и 60 см, измерение действующей на лопатку (12) во время ее перемещения в бетоне силы и сбор силовых данных, и оценку измеренных силовых данных и отображение оцененных результатов. Техническим результатом является предотвращение радиальной сегрегации присутствующих в бетоне твердых частиц и возможность имитации устройством обычной штукатурной лопатки, используемой рабочими на строительной площадке, так что измеренные данные могут быть соотнесены с испытываемыми рабочими субъективными "ощущениями" при проверке свойств бетона вручную. 2 н. и 12 з.п. ф-лы, 7 ил., 4 табл.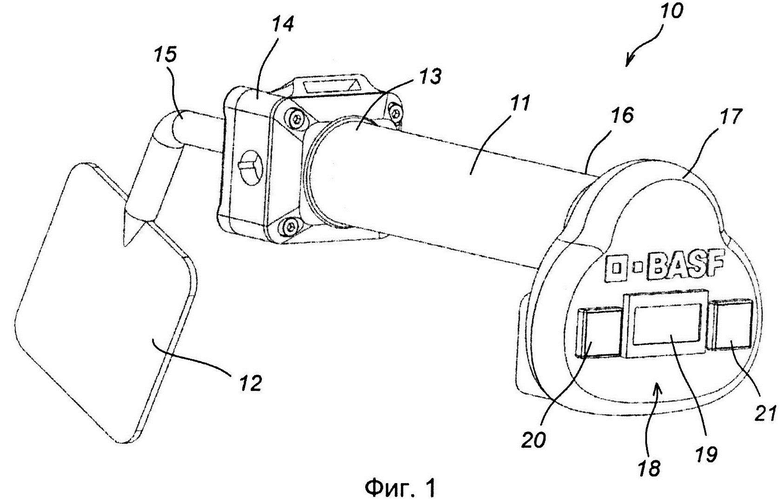
1. Портативная ручная штукатурная лопатка (10) для определения реологических свойств бетона, содержащая:
- рукоять (11) для ручной эксплуатации штукатурной лопатки, причем рукоять имеет передний конец (13) и задний конец (16),
- лопатку (12), присоединенную без возможности вращения к переднему концу (13) рукояти (11),
- сенсорное средство (14) для определения действующей на лопатку (12) силы,
- электронный модуль (17) для оценки собранных сенсорным средством (14) данных, и
- источник электроэнергии для обеспечения электроэнергией сенсорного средства и электронного модуля.
2. Штукатурная лопатка по п. 1, причем лопатка (12) присоединена к переднему концу (13) рукояти (11) с возможностью снятия.
3. Штукатурная лопатка по п. 2, содержащая по меньшей мере две сменные лопатки.
4. Штукатурная лопатка по одному из пп. 1-3, причем сенсорное средство содержит тензометрический датчик.
5. Штукатурная лопатка по одному из пп. 1-4, причем сенсорное средство (14) содержит расположенную на переднем конце (13) рукояти (11) сенсорную головку.
6. Штукатурная лопатка по п. 5, причем сенсорная головка (14) содержит гибкую пластину (22), на которой через хвостовик (15) жестко закреплена лопатка (12).
7. Штукатурная лопатка по любому из предшествующих пунктов, причем электронный модуль (17) содержит дисплей (18).
8. Штукатурная лопатка по любому из предшествующих пунктов, причем сенсорное средство (14) или электронный модуль (17) содержит акселерометр.
9. Штукатурная лопатка по любому из предшествующих пунктов, причем источник электроэнергии содержит перезаряжаемую или неперезаряжаемую батарею.
10. Способ определения реологических свойства бетона с использованием портативной ручной штукатурной лопатки по любому из пп. 1-9, содержащий шаги:
- полное погружение лопатки (12) в бетон,
- ручное перемещение лопатки (12) вдоль линейного пути в бетоне на предварительно заданное расстояние, выбранное между 10 и 60 см,
- измерение действующей на лопатку (12) во время ее перемещения в бетоне силы и сбор силовых данных,
- оценка измеренных силовых данных и отображение оцененных результатов.
11. Способ по п. 10, причем силовые данные собирают через постоянные интервалы.
12. Способ по п. 11, причем силовые данные автоматически собирают, когда измеренная сила превышает заданный порог.
13. Способ по одному из пп. 10-12, причем предварительно заданное расстояние составляет примерно 30 см.
14. Способ по любому из пп. 10-13, причем оцененные результаты содержат измеренную вдоль пути лопатки (12) максимальную силу и/или интеграл по силовым данным, полученным во время перемещения лопатки.
| US 5541855 A1, 30.07.1996 | |||
| US 4869098 A1, 26.09.1989 | |||
| Устройство для измерения вязкости дисперсной системы | 1975 |
|
SU569902A1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЯЗКОСТИ И ВИСКОЗИМЕТР | 1995 |
|
RU2155953C2 |
| Прибор для определения пластическойпРОчНОСТи СыРцА ячЕиСТОгО бЕТОНА | 1979 |
|
SU815626A1 |
| JP 2000329673 A, 30.11.2000 | |||
| JP 2000258327 A, 22.09.2000. | |||

