Область техники, к которой относится изобретение
Настоящее изобретение относится к системам избежания столкновений для транспортных средств.
УРОВЕНЬ ТЕХНИКИ
Транспортные средства могут использовать специализированную связь ближнего действия для обмена информацией с другими транспортными средствами, дорожной инфраструктурой или другими объектами, движущимися по проезжей части дороги, такими как велосипедисты. Система избежания столкновений для транспортного средства может использовать эту информацию для уклонения от препятствий, определения дорожных условий или нахождения маршрутов сквозь поток транспорта. Системы избежания столкновений также могут передавать обмениваемую информацию с использованием специализированной связи ближнего действия в другие системы управления транспортным средством, чтобы помогать эффективной эксплуатации транспортного средства.
Сущность изобретения
Система включает в себя контроллер. Контроллер выполнен с возможностью, в ответ на прием данных местоположения и скорости с других транспортных средств, указывающих ожидаемое столкновение в отсутствие изменения траектории, управлять направлением движения транспортного средства для избежания столкновения по пути. Путь основан на данных карты, идентифицирующих тип разметки полосы движения для проезда, так чтобы путь переходил из полосы движения, когда тип разметки является прерывистым, и не переходил из полосы движения, когда тип разметки является сплошным.
В дополнительном аспекте контроллер дополнительно выполнен с возможностью формировать предупреждение об автоматическом рулевом управлении.
В другом дополнительном аспекте предупреждение является осязательной обратной связью, которая выдается в зоне рулевого колеса в направлении пути.
В еще одном дополнительном аспекте предупреждение является слышимым тоном, имеющим постоянную частоту.
В еще одном дополнительном аспекте предупреждение является визуальным световым индикатором состояния в транспортном средстве.
Транспортное средство включает в себя рулевое колесо и контроллер. Контроллер выполнен с возможностью, в ответ на прием данных местоположения и скорости с других транспортных средств, указывающих ожидаемое столкновение в отсутствие изменения траектории, автоматически управлять рулевым колесом, чтобы направлять транспортное средство по пути избежания столкновений. Путь избежания столкновений основан на данных карты, идентифицирующих тип разметки полосы движения для проезда, так чтобы путь переходил из полосы движения, когда тип разметки является прерывистым, и не переходил из полосы движения, когда тип разметки является сплошным.
В дополнительном аспекте транспортное средство дополнительно содержит приемопередатчик специализированной связи ближнего действия, выполненный с возможностью принимать данные местоположения и скорости.
В другом дополнительном аспекте контроллер дополнительно выполнен с возможностью, в ответ на прием данных состояния красного света светофора, настраивать путь избежания столкновений, чтобы учитывать данные состояния красного сигнала светофора.
В еще одном дополнительном аспекте контроллер дополнительно выполнен с возможностью, в ответ на сплошной тип разметки, тормозить транспортное средство.
Способ управления для транспортного средства включает в себя, в ответ на прием данных с других транспортных средств, указывающих ожидаемое столкновение в отсутствие изменения траектории, автоматическое управление направлением движения транспортного средства для избежания столкновения по пути. Путь основан на данных, идентифицирующих тип разметки полосы движения для проезда, так чтобы путь переходил из полосы движения, когда тип разметки является прерывистым, и не переходил из полосы движения, когда тип разметки является сплошным.
В дополнительном аспекте путь переходит из полосы движения, когда тип разметки является прерывистым, в смежную полосу движения.
В другом дополнительном аспекте путь является таким, что положение транспортного средства смещается в пределах полосы движения для проезда, чтобы избегать ожидаемого столкновения.
В еще одном дополнительном аспекте путь является таким, что скорость транспортного средства настраивается, чтобы учитывать объект в пределах полосы движения для проезда.
В еще одном дополнительном аспекте способ управления дополнительно состоит в том, что принимают дополнительные данные от других транспортных средств и автоматически управляют направлением движения транспортного средства по другому пути.
В еще одном дополнительном аспекте способ управления дополнительно состоит в том, что, в ответ на прием данных, указывающих инициированный находящимся в транспортном средстве человеком запрос принудительной отмены, отменяют автоматическое рулевое управление.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
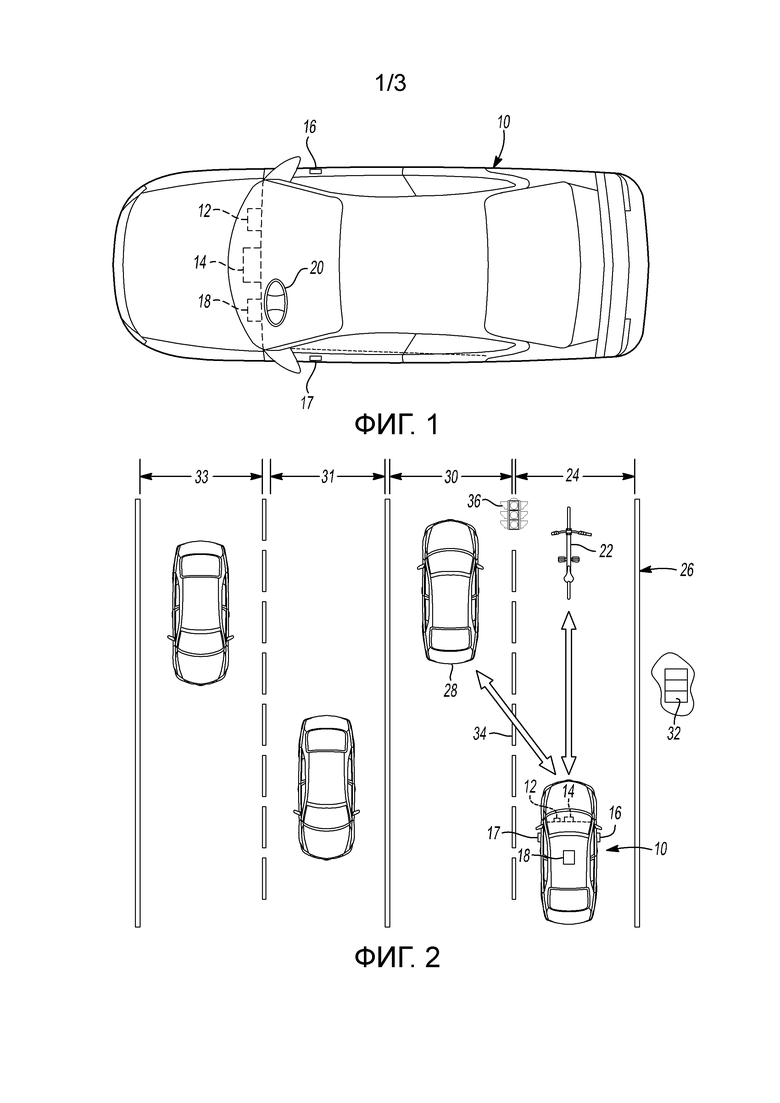
Фиг. 1 - схематический вид транспортного средства, имеющего систему избежания столкновений;
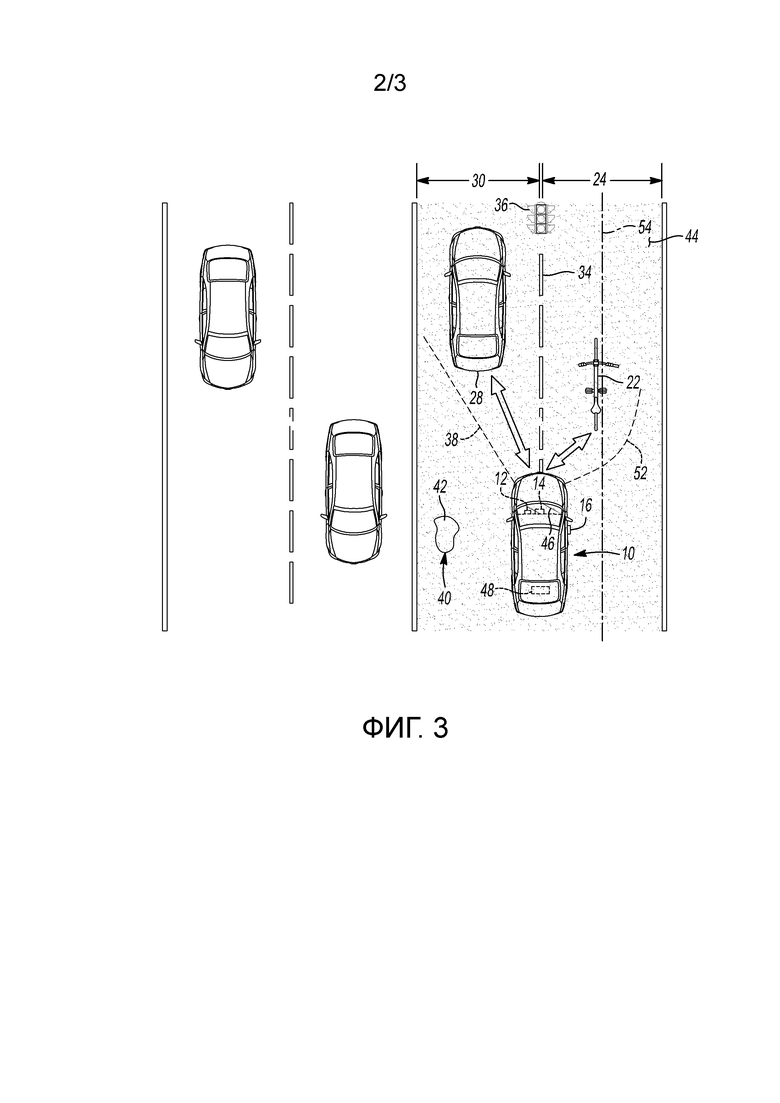
фиг. 2 - схематический вид транспортного средства, выявляющего объект с использованием приемопередатчика DSRC;
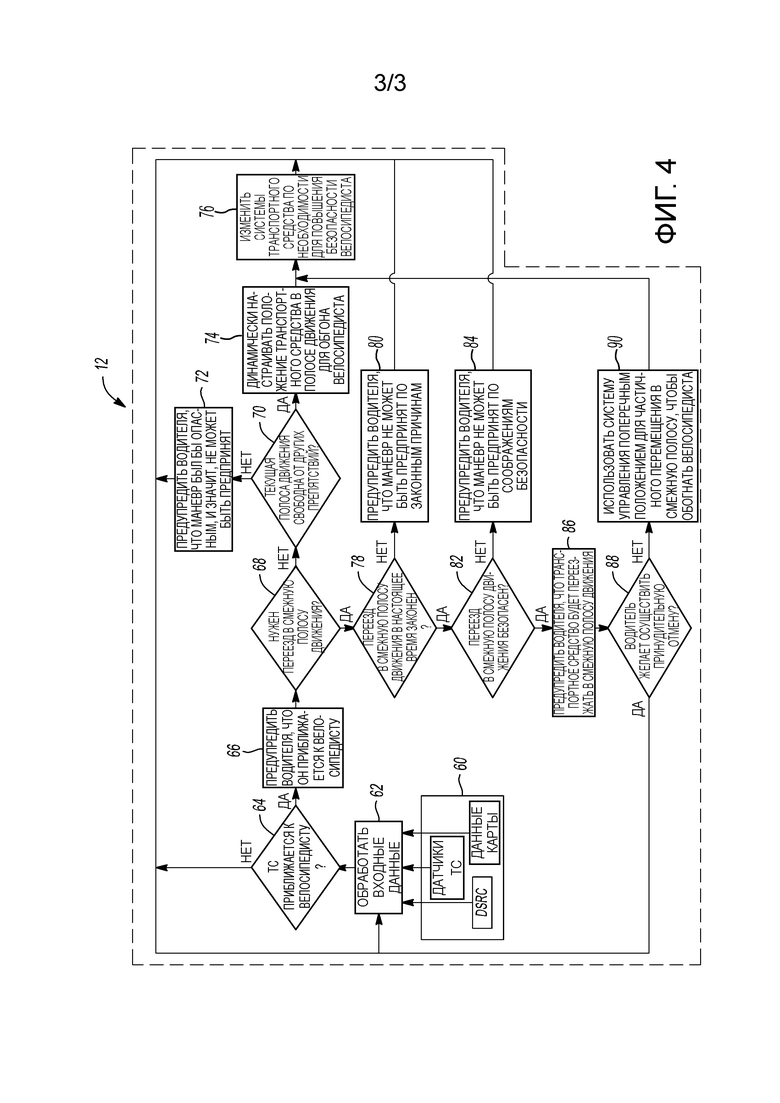
фиг. 3 - схематический вид транспортного средства, формирующего траекторию для обгона объекта; и
фиг. 4 - блок-схема последовательности операций способа, изображающая логику управления системы избежания столкновений.
ПОДРОБНОЕ ОПИСАНИЕ
Варианты осуществления настоящего изобретения описаны в материалах настоящей заявки. Должно быть понятно, однако, что раскрытые варианты осуществления являются всего лишь примерами, и другие варианты осуществления могут принимать различные и альтернативные формы. Фигуры не обязательно должны определять масштаб; некоторые признаки могли бы быть преувеличены или преуменьшены, чтобы показывать подробности конкретных компонентов. Поэтому, конкретные конструктивные и функциональные детали, раскрытые в материалах настоящей заявки, должны интерпретироваться не в качестве ограничивающих, а только в качестве представляющих основу для обучения специалиста в данной области техники по-разному использовать настоящее изобретение. Как будут понимать рядовые специалисты в данной области техники, различные признаки, проиллюстрированные и описанные со ссылкой на любую одну из фигур, могут комбинироваться с признаками, проиллюстрированными на одной или более других фигур, для создания вариантов осуществления, которые не проиллюстрированы и не описаны явно. Проиллюстрированные комбинации признаков дают показательные варианты осуществления для типичных применений. Различные комбинации и модификации признаков, совместимых с доктринами этого изобретения, однако, могли бы быть желательны для конкретных применений или реализаций.
Фиг. 1 изображает транспортное средство 10, имеющее систему 12 избежания столкновений. Система 12 избежания столкновений может давать команду контроллеру 14 на связи с приемопередатчиком 16 связи. Приемопередатчик 16 связи может быть выполнен с возможностью отправлять и принимать информацию, указывающую местоположение транспортного средства 10, скорость транспортного средства 10 и возможную траекторию транспортного средства 10. В по меньшей мере одном варианте осуществления, приемопередатчик 16 может быть приемопередатчиком специализированной связи ближнего действия. Приемопередатчик 16 связи также может использовать сети для информационного обмена, такие как, но не в качестве ограничения, Bluetooth, Wi-Fi или любую другую систему связи для информационного обмена транспортного средства. Специализированный приемник 16 связи ближнего действия может предоставлять возможность для связи между транспортными средствами (V2V) или между транспортным средством и всем остальным (V2X), в том числе, дорожной инфраструктурой, велосипедистами или любым другим объектом, который использует приемопередатчик 16 связи.
Как будет подробнее описано ниже, объекты, такие как велосипедисты, могут создавать уникальные препятствия для находящихся на проезжей части дороги. Наличие в распоряжении системы 12 избежания столкновений, способной обмениваться информацией, принятой из приемопередатчика 16 связи, с контроллером 14 транспортного средства, предоставляет возможность улучшенной связи между транспортными средствами, которые совместно используют проезжую часть дороги, и объектами на проезжей части дороги. Улучшенная связь между транспортными средствами и объектами на проезжей части дороги дополнительно помогает предотвращению событий удара при столкновении. Например, как будет описано со ссылкой на другие фигуры, велосипедист (не показан) может занимать полосу движения транспортного средства (не показана). Система 12 избежания столкновений может использовать систему 18 навигации, а также систему 17 технического зрения для обмена информацией через приемопередатчик 16 связи с велосипедистом. Система 17 технического зрения может использовать бортовые камеры, ультразвуковые датчики или любой другой датчик, который может выявлять окрестности транспортного средства. Система 17 технического зрения может использовать камеры и ультразвуковые датчики по отдельности или одновременно, чтобы точно изображать окрестности транспортного средства. Система 18 технического зрения может использовать данные карты и данные глобальной системы определения местоположения для передачи информации, такой как скорость транспортного средства, траектория транспортного средства и дорожная обстановка.
Система 12 избежания столкновений использует передачу информации из приемопередатчика 16 связи и системы 17 технического зрения, и системы 18 навигации для улучшения эксплуатационных качеств транспортного средства 10. Система 12 избежания столкновений передает информацию в контроллер 14, для того чтобы предупреждать находящегося в транспортном средстве человека о приближающемся объекте, таком как велосипедист, настраивать траекторию транспортного средства для ввода коррекции на велосипедиста или изменять положение компонентов транспортного средства, таких как тормозная педаль, для настройки положения транспортного средства относительно велосипедиста. Система 12 избежания столкновений может давать команду контроллеру 14 настраивать другие системы транспортного средства, по отдельности или одновременно, как требуют обстоятельства. Контроллер 14 может быть выполнен с возможностью настраивать любую систему транспортного средства, такую как система 20 рулевого управления, которая может помогать в улучшении эксплуатационных качеств транспортного средства 10, на основании информации, принятой из приемопередатчика 16 связи, о положении, скорости или траектории велосипедиста.
Со ссылкой на фиг. 2 и 3, показано схематическое изображение транспортного средства, использующего систему 12 избежания столкновений. Фиг. 2 изображает идентификацию велосипедиста 22 в первой полосе 24 движения дороги 26 и расположенного рядом транспортного средства 28 во второй полосе 30 движения дороги 26. Фиг. 3 изображает транспортное средство 10, выполняющее маневр с первой полосы 24 движения во вторую полосу 30 движения на основании информационного обмена между расположенным рядом транспортным средством 28 и велосипедистом 22. Как будет подробнее обсуждено ниже, система 12 избежания столкновений поддерживает связь с контроллером 14 и приемопередатчиком 16 связи для получения и анализа информации, чтобы безопасно выполнять маневр транспортного средства с уклонением от велосипедиста 22.
Фиг. 2 изображает идентификацию велосипедиста 22 и разрешение конфликтов между системой 12 избежания столкновений, контроллером 14 и приемопередатчиком 16. По мере того, как транспортное средство 10 приближается к велосипедисту 22, приемопередатчик 16 принимает данные, широковещательно передаваемые от велосипедиста 22, указывающие присутствие велосипедиста 22. В по меньшей мере одном варианте осуществления, приемопередатчик 16 использует специализированную связь ближнего действия для приема данных от велосипедиста 22. Это предоставляет приемопередатчику 16 возможность начинать прием входных данных от велосипедиста 22 в пределах дальности приблизительно 300 м. Как только велосипедист 22 был идентифицирован приемопередатчиком 16, система 12 избежания столкновений может использовать систему 17 технического зрения, как описано выше, для подтверждения присутствия велосипедиста 22. Система 17 технического зрения подтверждает присутствие велосипедиста 22 по мере того, как транспортное средство 10 приближается к и входит в пределы дальности действия системы 17 технического зрения.
Приемопередатчик 16 может передавать данные, принятые от велосипедиста 22, такие как местоположение и скорость велосипедиста 22, в систему 12 избежания столкновений. Система 17 технического зрения также передает местоположение велосипедиста 22 в систему 12 избежания столкновений. Использование обоих, приемопередатчика 16 и системы 17 технического зрения, дает системе 12 избежания столкновений точное представление по меньшей мере о местоположении велосипедиста 22. Система 18 навигации также может выдавать данные карты в систему 12 избежания столкновений. Например, система 18 навигации может быть выполнена с возможностью передавать данные карты с внешнего сервера 32, чтобы инструктировать систему 12 избежания столкновений. Данные карты из системы 18 навигации могут включать в себя, но не в качестве ограничения, индикацию первой полосы 24 движения и второй полосы 30 движения. Система 18 навигации инструктирует систему 12 избежания столкновений, может ли первая полоса 24 движения также считаться велосипедной полосой для велосипедиста 22. Подобным образом, система 18 навигации может инструктировать систему 12 избежания столкновений, может ли первая полоса 24 движения считаться полосой движения для проезда для транспортного средства 10. Несмотря на то, что дорога 26 изображена в виде имеющей первую полосу 24 движения и вторую полосу 30 движения, система 18 навигации также может быть выполнена с возможностью определять любое количество полос движения на дороге 26, таких как третья полоса 31 движения и четвертая полоса 33 движения.
Система 12 избежания столкновений сравнивает данные местоположения велосипедиста 22 из приемопередатчика 16 и системы 17 технического зрения и данные карты из системы 18 навигации, чтобы определять местоположение велосипедиста 22 в первой полосе 24 движения. Несмотря на то, что изображен в виде велосипедиста 22, приемопередатчик 16 и система 17 технического зрения с системой 18 навигации могут быть способны инструктировать систему 12 избежания столкновений о существовании любого другого объекта, который может быть помехой транспортному средству 10. Как только система 12 избежания столкновений идентифицирует, что велосипедист 22 движется в первой полосе 24 движения и является помехой транспортному средству 10, система 12 избежания столкновений анализирует дорогу 26. Например, с использованием системы 18 навигации и системы 17 технического зрения, система 12 избежания столкновений определяет характеристики 34 проезжей части дороги, такие как элементы разметки полосы движения.
Как изложено выше, система навигации может инструктировать систему 12 избежания столкновений в отношении количества полос движения на дороге 26, а также типа дороги 26, по которой движется транспортное средство 10. Система 17 технического зрения может использоваться для идентификации и подтверждения типа разметки 34 полос движения на дороге 26. Например, система 18 навигации может инструктировать систему 12 избежания столкновений, что транспортное средство 10 движется по проезжей части дороги, и система 17 навигации может идентифицировать пунктирные желтые линии, совместимые с разметкой полос движения проезжей части дороги. Система 17 технического зрения также может использоваться для идентификации любого другого типа разметки полосы движения, широко используемого на дороге 26, такого как, но не в качестве ограничения, двойные желтые линии, одиночные белые линии или одиночная желтая линия с расположенной рядом пунктирной желтой линией.
Система 12 избежания столкновений использует характеристики 34 проезжей части дороги из системы 18 навигации и системы 17 технического зрения для анализа дорожной обстановки 36. Система 12 избежания столкновений может использовать входной сигнал из приемопередатчика 16 для определения и анализа текущей дорожной обстановки 36. Приемопередатчик 16, как изложено выше, также может использоваться для передачи данных из расположенного рядом транспортного средства 28 или из любой другой инфраструктуры, которая использует специализированную связь ближнего действия. Например, дорожная обстановка 36 может включать в себя данные со светофоров, знаков остановки или любой другой инфраструктуры, используемой для влияния на маневры транспортного средства 10. Система 12 избежания столкновений использует характеристики 34 проезжей части дороги и дорожную обстановку 36, определенные из приемопередатчика 16, системы 17 технического зрения и системы 18 навигации, для анализа обстановки вокруг и вне транспортного средства 10.
Фиг. 3 продолжает изображать разрешение конфликтов между системой 12 избежания столкновений, контроллером 14 и приемопередатчиком 16, а также изображает выполнение маневра транспортного средства 10. После анализа обстановки, внешней для транспортного средства 10, система 12 избежания столкновений определяет возможную траекторию 38 для транспортного средства. Возможная траектория 38 может быть основана на дорожной обстановке 36 и характеристиках 34 проезжей части дороги, чтобы определять безопасный маневр для уклонения транспортного средства 10 от велосипедиста 22. Возможная траектория 38 может анализироваться системой 12 избежания столкновений и включать в себя случаи, такие как переезд во вторую полосу 30 движения или смещение транспортного средства 10 в пределах первой полосы 24 движения. Эти определения вновь оцениваются на основании характеристик 34 проезжей части дороги и дорожной обстановки 36, как обсуждено выше. Например, система 12 избежания столкновений проверяет, что возможная траектория 38 не будет пересекаться с расположенным рядом транспортным средством 28 или велосипедистом. Подобным образом, система 12 избежания столкновений проверяет, что потенциальная траектория 38 является законным и безопасным маневром для транспортного средства 10. Например, система 12 избежания столкновений проверяет, что возможная траектория 38 не пересекает разметку двойной желтой центральной линии или не проходит, тем временем переезжая перекресток на красный свет светофора.
Система 12 избежания столкновений также может формировать возможную траекторию 38 на основании условного состояния 40 дороги 26. Например, система 12 избежания столкновений может принимать данные из приемопередатчика 16, указывающие инородный предмет 42 на проезжей части дороги, такой как выбоина или существующее строительство. Подобным образом, система 12 избежания столкновений может принимать данные из системы 18 навигации, указывающие дорожные условия 44, такие как недавний дождь или обледенение. Контроллер 14 также может принимать входной сигнал с наружных датчиков 46 транспортного средства, чтобы предоставлять системе избежания столкновений возможность контролировать дорожные условия 44. Например, датчик дождя или температуры и ультразвуковой датчик могут предоставлять контроллеру 14 возможность инструктировать систему 12 избежания столкновений в отношении возможных инородных предметов 42 на дороге или дорожных условий 44. Система 12 избежания столкновений использует данные, указывающие дорожную обстановку 36, характеристики 34 проезжей части дороги, инородные предметы 42 на дороге и дорожные условия, чтобы указывать вероятность, что возможная траектория 38 будет давать в результате безопасный и исполнимый маневр для транспортного средства 10. Если вероятность возможной траектории 38 находится выше заранее заданного порогового значения, система 12 избежания столкновений может начинать инструктирование контроллера 14, чтобы выполнял маневр для транспортного средства 10. Подобным образом, если вероятность возможной траектории 38 находится ниже заранее заданного порогового значения, система 12 избежания столкновений принудительно отменяет маневр. Это будет обсуждено подробнее со ссылкой на фиг. 4.
Если маневрирование транспортного средства 10 является вероятным, система 12 избежания столкновений указывает находящемуся в транспортном средстве человеку рассматриваемый маневр. Система 12 избежания столкновений может давать команду контроллеру 14 приводить в действие индикатор 48 в кабине 50 транспортного средства 10. Индикатор 48 может быть каким-нибудь компонентом человеко-машинного интерфейса в транспортном средстве, таким как, но не в качестве ограничения, звуковое оповещение, визуальное оповещение или осязательная обратная связь, выдаваемые находящемуся в транспортном средстве человеку транспортного средства 10. Например, индикатор 48 может включать в себя засвечивание световых сигналов, вырабатывание тонального сигнала или вибрацию компонентом транспортного средства, таким как рулевое колесо (не показано), педаль (не показана) или сиденье (не показано). Индикатор 48 может быть действующим во время всех случаев выполнения и может использовать единую индикацию или многочисленные индикации на всем протяжении выполнения маневра. Например, контроллер 14 может приводить в действие индикатор 48, чтобы засвечивать световой сигнал, указывающий наличие велосипедиста 22.
Контроллер 14 затем может приводить в действие индикатор 48, чтобы вырабатывать тональный сигнал, предупреждающий находящегося в транспортном средстве человека, что возможная траектория 38 может выполняться или не выполняться для уклонения от велосипедиста 22. Контроллер 14 также может приводить в действие индикатор 48, чтоб выдавать осязательную обратную связь на рулевом колесе, чтобы предупреждать находящегося в транспортном средстве человека, что транспортное средство 10 переезжает во вторую полосу 30 движения. Индикатор 48 также может быть указывающим выполнение маневра. В качестве примеров, световой сигнал может светиться в форме велосипеда, тональный сигнал может давать слышимые инструкции находящемуся в транспортном средстве человеку, и осязательная обратная связь может представляться на стороне рулевого колеса, ближайшей к тому, куда может маневрировать возможная траектория 38. Посредством приведения в действие индикатора 48 на протяжении всех стадий выполнения, система 12 избежания столкновений также предоставляет находящемуся в транспортном средстве человеку возможность принудительно отменять возможную траекторию 38.
Если вероятность возможной траектории 38 находится выше порогового значения, и находящийся в транспортном средстве человек принудительно не отменил возможную траекторию 38 на основании индикатора 48, система 12 избежания столкновений маневрирует транспортным средством 10. Система 12 избежания столкновений маневрирует транспортным средством 10 с использованием контроллера 14. Контроллер 14 может приводить в действие системы транспортного средства, такие как, но не в качестве ограничения, система рулевого управления и системы позиционирования тормозной педали и педали акселератора. Контроллер 14 может инструктировать систему рулевого управления системы позиционирования тормозной педали и педали акселератора на основании входного сигнала, принятого с датчиков в системах. Например, контроллер 14 может настраивать угол поворота управляемых колес по рулевому колесу на основании входного сигнала с датчика угла поворота управляемых колес по сравнению с возможной траекторией 38, предусмотренной системой 12 избежания столкновений. Подобным образом, контроллер 14 может настраивать положение тормозной педали или положение педали акселератора на основании входного сигнала с датчика скорости вращения колес или измерителя ускорений по сравнению с возможной траекторией 38, предусмотренной системой 12 избежания столкновений. Контроллер 14, благодаря использованию системы рулевого управления и систем позиционирования тормозной педали и педали акселератора, может быть контроллером 14 поперечного позиционирования. Контроллер 14 поперечного позиционирования использует входные сигналы из различных систем транспортного средства, как описано выше, чтобы безопасно и точно маневрировать транспортным средством 10 вокруг велосипедиста 22 согласно возможной траектории 38, как предусмотрено системой 12 избежания столкновений.
Система 12 избежания столкновений может постоянно контролировать контроллер 14, приемопередатчик 16, систему 17 технического зрения и систему 18 навигации. Система 12 избежания столкновений постоянно принимает данные из приемопередатчика 16, системы 17 технического зрения и системы 18 навигации, чтобы предоставлять возможность для ввода коррекции во время выполнения возможной траектории 38. Например, расположенное рядом транспортное средство 28 и/или велосипедист 22 могут внезапно и неожиданно изменять скорость или менять положения. Изменение скорости или смена положений расположенного рядом транспортного средства 28 и/или велосипедиста 22 может делать возможную траекторию 38 неудовлетворительной. Посредством постоянного контроля, система 12 избежания столкновений может использовать приемопередатчик 16, систему 17 технического зрения и систему 18 навигации для изменения или принудительной отмены возможной траектории 38 на основании обновленных входных данных из приемопередатчика 16, системы 17 технического зрения и системы 18 навигации. Постоянный контроль также предоставляет системе 12 избежания столкновений возможность быть приспосабливаемой на основании дорожной обстановки 36, характеристик 34 проезжей части дороги, инородных предметов 42 на дороге и дорожных условий 44. Система 12 избежания столкновений использует эти входные сигналы для принудительной отмены возможной траектории 38, если контроллер 14 еще не начал маневрирование, или для формирования второй траектории 52, если необходимо.
Вторая траектория 52 может возвращать транспортное средство 10 в первую полосу 24 движения или может продолжать обгонять велосипедиста 22, если система 12 избежания столкновений определяет, на основании входных сигналов, описанных выше, что обгон велосипедиста 22 осуществим. Например, вторая траектория 52 может включать в себя возврат транспортного средства 10 на центр 54 первой полосы 24 движения и выдачу команды контроллеру 14 настраивать скорость транспортного средства 10, изменяя положение тормозной педали. Вторая траектория 52 также может включать в себя смещение положения транспортного средства 10 от центра 54 первой полосы 24 движения и переезд во вторую полосу 30 движения после того, как обогнало расположенное рядом транспортное средство 28. Система 12 избежания столкновений работает вместе с контроллером 14, приемопередатчиком 16, системой 17 технического зрения и системой 18 навигации, чтобы учитывать и приспосабливаться к неожиданным событиям, которые могут происходить во время нормальной эксплуатации транспортного средства.
Кроме того, во время обгона велосипедиста 22, система 12 избежания столкновений может давать команду контроллеру 14 настраивать признаки транспортного средства, чтобы обеспечивать безопасный обгон велосипеда 22. Например, система 12 избежания столкновений может давать команду контроллеру 14 понижать скорость работы стеклоочистителя, чтобы избегать сметание избыточной воды с ветрового стекла на велосипедиста 22. Посредством выдачи команды контроллеру 14 настраивать различные признаки транспортного средства, система избежания столкновений гарантирует, что обгоняющее транспортное средство 10 не застало велосипедиста 22 врасплох, и он способен сохранять управление, в то время как транспортное средство 10 обгоняет велосипедиста 22. Система 12 избежания столкновений гарантирует, что транспортное средство 10 безопасно маневрирует вокруг велосипедиста 22.
Фиг. 4 изображает блок-схему последовательности операций способа по логике управления, используемой системой 12 избежания столкновений. Система 12 избежания столкновений использует логику управления, чтобы действовать, как описано выше. Однако, система 12 избежания столкновений также может сегментировать логику управления. Например, система 12 избежания столкновений также может быть выполнена с возможностью всего лишь формировать оповещения, как описано выше, или использовать позиционирование в полосе движения, как описано выше. Подобным образом, логика управления для системы 12 избежания столкновений описана как последовательная, однако, может приводиться в действие одновременно. Эксплуатация системы 12 избежания столкновений может достигаться с использованием этапов, описанных ниже любым способом или образом, который предоставляет системе 12 избежания столкновений возможность действовать, как обсуждено.
Как описано выше, система 12 избежания столкновений постоянно контролирует входные сигналы из приемопередатчика, контроллера, системы навигации и системы технического зрения на 60. Система 12 избежания столкновений обрабатывает эти входные сигналы на 62 в соответствии с вышеприведенным описанием. Обработка данных на 62 предоставляет системе 12 избежания столкновений возможность решать, является ли транспортное средство приближающимся к велосипедисту, на 64. Если на 64 система 12 избежания столкновений определяет, что транспортное средство не приближается к велосипедисту, система избежания столкновений осуществляет возврат, чтобы непрерывно обрабатывать входные данные на 62. Непрерывная обработка входных данных на 62 предоставляет системе 12 избежания столкновений возможность действовать непрерывно, чтобы контролировать обстановку транспортного средства. Если на 64 система 12 избежания столкновений определяет, что транспортное средство приближается к велосипедисту, система 12 избежания столкновений предупреждает находящегося в транспортном средстве человека о рассматриваемом приближении на 66. Как изложено выше, предупреждение на 66 может быть слышимым тоном на заданной частоте или звуковым оповещением, проговариваемым на языке находящегося в транспортном средстве человека. В по меньшей мере одном другом варианте осуществления, предупреждение может быть визуальным индикатором, таким как свечение светового сигнала, или физическим индикатором, таким как осязательная обратная связь на сиденье, рулевом колесе или педали. Предупреждение находящегося в транспортном средстве человека на 66 предоставляет системе 12 избежания столкновений возможность информировать находящегося в транспортном средстве человека о возможном рассматриваемом маневре.
Система 12 избежания столкновений использует входные сигналы, описанные выше, для определения, нужен ли переезд в смежную полосу движения, на 68. Если система 12 избежания столкновений определяет, что переезд в смежную полосу движения на 68 не нужен, система 12 избежания столкновений определяет, свободна ли текущая полоса движения для проезда транспортного средства от других препятствий, на 70. Если на 70 текущая полоса движения для проезда не свободна от других препятствий, то система 12 избежания столкновений предупреждает находящегося в транспортном средстве человека, что выполнение маневра может не быть безопасным, на 72. Как изложено выше, предупреждение на 72 может быть слышимым тоном на заданной частоте или звуковым оповещением, проговариваемым на языке находящегося в транспортном средстве человека. В по меньшей мере одном другом варианте осуществления, предупреждение может быть визуальным индикатором, таким как свечение светового сигнала, или физическим индикатором, таким как осязательная обратная связь на сиденье, рулевом колесе или педали. После того, как система 12 избежания столкновений принудительно отменяет возможный маневр на 72, логика управления осуществляет возврат, чтобы вновь обрабатывать входные данные на 62. Однако, если система 12 избежания столкновений определяет на 70, что полоса движения для проезда свободна от других препятствий, система 12 избежания столкновений может динамически настраивать положение транспортного средства в пределах текущей полосы движения для проезда на 74. Динамическая настройка положения транспортного средства на 74 может указывать смещение транспортного средства к любой из сторон от центра полосы движения и/или настройку скорости транспортного средства, чтобы принимать во внимание велосипедиста. На 76, система 12 избежания столкновений дает команду контроллеру настраивать системы транспортного средства, необходимые для принятия во внимание велосипедиста, и логика управления продолжает обрабатывать входные данные на 62.
Возвращаясь на 68, если система 12 избежания столкновений определяет, что необходим переезд в смежную полосу движения, система 12 избежания столкновений использует входные данные и обстановку, как описанные выше, для определения, является ли переезд в смежную полосу движения законным маневром, на 78. Если, на 78, система 12 избежания столкновений определяет, что переезд в смежную полосу движения не законен, система 12 избежания столкновений предупреждает находящегося в транспортном средстве человека, что маневр не будет предпринят по законным причинам, на 80, и логика управления обрабатывает входные данные на 62. Предупреждение находящегося в транспортном средстве человека на 80, что маневр не будет предпринят вследствие законных причин, предоставляет находящемуся в транспортном средстве человеку возможность проверить точность определения, произведенного системой 12 избежания столкновений на 78. Как изложено выше, предупреждение на 80 может быть слышимым тоном на заданной частоте или звуковым оповещением, проговариваемым на языке находящегося в транспортном средстве человека. В по меньшей мере одном другом варианте осуществления, предупреждение может быть визуальным индикатором, таким как свечение светового сигнала, или физическим индикатором, таким как осязательная обратная связь на сиденье, рулевом колесе или педали.
Если на 78 система 12 избежания столкновений определяет, что переезд в смежную полосу движения является законным маневром, система избежания столкновений затем определяет, является ли переезд в смежную полосу движения безопасным маневром, на 82. Вновь, система 12 избежания столкновений принимает решение, что выполнение возможного маневра является безопасным, на 82, на основании входных данных, принятых из систем транспортного средства, указывающих окружающую обстановку транспортного средства, характеристики проезжей части дороги, возможную навязанную проезжую часть дороги и дорожные условия. Если система 12 избежания столкновений определяет, что переезд в смежную полосу движения не безопасен, на 82, система 12 избежания столкновений дает команду контроллеру предупреждать находящегося в транспортном средстве человека, что маневр не будет предпринят вследствие соображений безопасности на 83, и логика управления продолжает обрабатывать входные данные на 62. Предупреждение находящегося в транспортном средстве человека, что маневр может не быть выполнен вследствие соображений безопасности, на 84 предоставляет находящемуся в транспортном средстве человеку проверять точность определения, произведенного системой 12 избежания столкновений, на 82. Это предоставляет находящемуся в транспортном средстве человеку возможность отменять определение на 82 и устраняет возможную ошибку системы 12 избежания столкновений. Как изложено выше, предупреждение на 84 может быть слышимым тоном на заданной частоте или звуковым оповещением, проговариваемым на языке находящегося в транспортном средстве человека. В по меньшей мере одном другом варианте осуществления, предупреждение может быть визуальным индикатором, таким как свечение светового сигнала, или физическим индикатором, таким как осязательная обратная связь на сиденье, рулевом колесе или педали.
Если на 82 система 12 избежания столкновений определяет, что маневр может быть предпринят, система избежания столкновений предупреждает находящегося в транспортном средстве человека, что транспортное средство будет выполнять маневр на основании расчетной траектории, на 86. Как изложено выше, предупреждение на 86 может быть слышимым тоном на заданной частоте или звуковым оповещением, проговариваемым на языке находящегося в транспортном средстве человека. В по меньшей мере одном другом варианте осуществления, предупреждение может быть визуальным индикатором, таким как свечение светового сигнала, или физическим индикатором, таким как осязательная обратная связь на сиденье, рулевом колесе или педали. Предупреждение находящегося в транспортном средстве человека, что маневр транспортного средства будет предпринят, на 86 предоставляет находящемуся в транспортном средстве человеку возможность принудительно отменять маневр. Система 12 избежания столкновений будет контролировать заранее заданные входные сигналы систем транспортного средства, указывающие инициированную находящимся в транспортном средстве человеком принудительную отмену маневра, и определять на 88, просигнализировал ли находящийся в транспортном средстве человек, что следует принудительно отменить маневр. Заранее заданные входные сигналы систем транспортного средства, указывающие инициированную находящимся в транспортном средстве человеком принудительную отмену, могут включать в себя, но не в качестве ограничения, нажатие тормозной педали, признак распознавания голоса для находящегося в транспортном средстве человека или использование человеко-машинного интерфейса для выбора кнопки на устройстве отображения.
Если, на 88, система 12 избежания столкновений принимает входной сигнал инициированной находящимся в транспортном средстве человеком принудительной отмены, маневр не будет выполняться, и логика управления продолжает обрабатывать входные данные на 62. Однако, если на 88 система 12 избежания столкновений не принимает входной сигнал инициированной находящимся в транспортном средстве человеком принудительной отмены, то, на 90, система 12 избежания столкновений будет давать команду контроллеру использовать управление поперечным положением и частично перемещаться в смежную полосу движения, или полностью перемещаться в смежную полосу движения, уклоняясь от велосипедиста. Система 12 избежания столкновений будет автоматически управлять направлением движения транспортного средства, чтобы избегать столкновения, на пути, который основан на данных карты из системы навигации, идентифицирующих тип разметки для полосы движения для проезда.
Несмотря на то, что примерные варианты осуществления описаны выше, не предполагается, что эти варианты осуществления описывают все возможные формы, охваченные формулой изобретения. Словесные формулировки, используемые в описании изобретения, скорее являются словесными формулировками описания, нежели ограничения, и понятно, что различные изменения могут быть произведены, не выходя из сущности и объема изобретения. Как описано ранее, признаки различных вариантов осуществления могут комбинироваться для формирования дополнительных вариантов осуществления изобретения, которые могут не быть описаны или проиллюстрированы в прямой форме. Несмотря на то, что различные варианты осуществления могли бы быть описаны в качестве обеспечивающих преимущества или являющихся предпочтительными над другими вариантами осуществления или реализациями предшествующего уровня техники, что касается одной или более требуемых характеристик, рядовые специалисты в данной области техники осознают, что один или более признаков или характеристик могут быть скомпрометированы для достижения требуемых общих свойств системы, которые зависят от конкретных применения и реализации. Эти свойства могут включать в себя, но не в качестве ограничения: себестоимость, прочность, надежность, затраты в течение жизненного цикла, пригодность для продажи, внешний вид, упаковку, габариты, ремонтопригодность, вес, технологичность, легкость сборки, и т. д. По существу, варианты осуществления, описанные как желательные в меньшей степени, чем другие варианты осуществления или реализации предшествующего уровня техники, что касается одной или более характеристик, не выходят за пределы объема изобретения и могут быть желательны для конкретных применений.
Изобретение относится к системам избежания столкновений для транспортных средств. Система управления транспортным средством для избежания столкновений содержит контроллер. Контроллер выполнен с возможностью, в ответ на прием данных местоположения и скорости с других транспортных средств, указывающих ожидаемое столкновение в отсутствие изменения траектории, автоматически управлять рулевым колесом, чтобы направлять транспортное средство по пути избежания столкновений. Путь избежания столкновений основан на данных карты, идентифицирующих тип разметки полосы движения для проезда, так чтобы путь переходил из полосы движения, когда тип разметки является прерывистым, и не переходил из полосы движения, когда тип разметки является сплошным. Повышается безопасность при использовании. 3 н. и 12 з.п. ф-лы, 4 ил.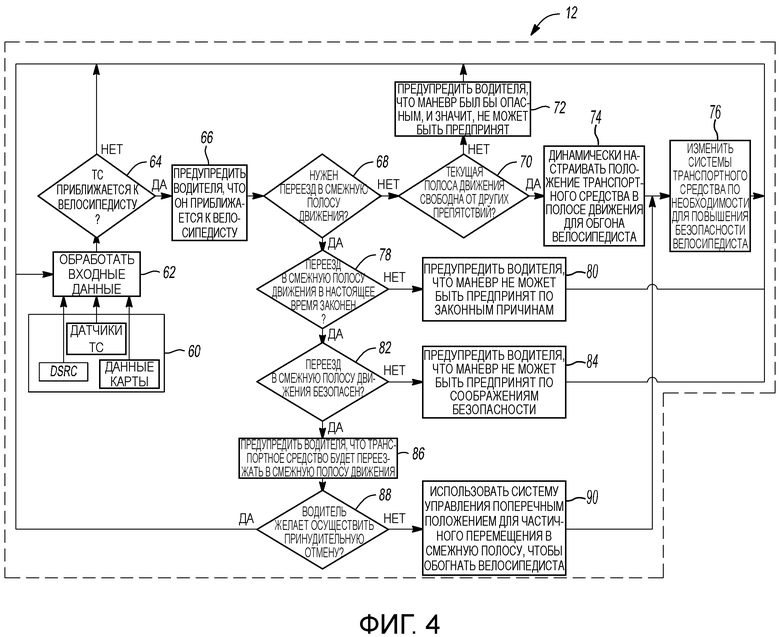
1. Система управления транспортным средством для избежания столкновений, содержащая:
контроллер, выполненный с возможностью, в ответ на прием данных местоположения и скорости от других транспортных средств, указывающих ожидаемое столкновение в отсутствие изменения траектории, управлять направлением движения транспортного средства, чтобы избегать столкновения, по пути, который основан на данных карты, идентифицирующих тип разметки для полосы движения для проезда, так чтобы путь переходил из полосы движения, когда тип разметки является прерывистым, и не переходил из полосы движения, когда тип разметки является сплошным.
2. Система по п. 1, в которой контроллер дополнительно выполнен с возможностью формировать предупреждение о рулевом управлении.
3. Система по п. 2, в которой предупреждение является осязательной обратной связью, которая выдается в зоне рулевого колеса в направлении пути.
4. Система по п. 2, в которой предупреждение является слышимым тоном, имеющим постоянную частоту.
5. Система по п. 2, в которой предупреждение является визуальным световым индикатором состояния в транспортном средстве.
6. Транспортное средство, содержащее:
рулевое колесо; и
контроллер, выполненный с возможностью, в ответ на прием данных местоположения и скорости от других транспортных средств, указывающих ожидаемое столкновение в отсутствие изменения траектории, автоматически управлять рулевым колесом, чтобы направлять транспортное средство вдоль пути избежания столкновений, который основан на данных карты, идентифицирующих тип разметки для полосы движения для проезда, так чтобы путь переходил из полосы движения, когда тип разметки является прерывистым, и не переходил из полосы движения, когда тип разметки является сплошным.
7. Транспортное средство по п. 6, дополнительно содержащее приемопередатчик специализированной связи ближнего действия, выполненный с возможностью принимать данные местоположения и скорости.
8. Транспортное средство по п. 6, в котором контроллер дополнительно выполнен с возможностью, в ответ на прием данных состояния красного света светофора, настраивать путь избежания столкновений, чтобы учитывать данные состояния красного света светофора.
9. Транспортное средство по п. 6, в котором контроллер дополнительно выполнен с возможностью, в ответ на сплошной тип разметки, тормозить транспортное средство.
10. Способ управления транспортным средством для избежания столкновений, состоящий в том, что
в ответ на прием данных от других транспортных средств, указывающих ожидаемое столкновение в отсутствие изменения траектории, автоматически управляют направлением движения транспортного средства, чтобы избегать столкновения, по пути, который основан на данных, идентифицирующих тип разметки для полосы движения для проезда, так чтобы путь переходил из полосы движения, когда тип разметки является прерывистым, и не переходил из полосы движения, когда тип разметки является сплошным.
11. Способ управления по п. 10, в котором путь переходит из полосы движения, когда тип разметки является прерывистым, в смежную полосу движения.
12. Способ управления по п. 10, в котором путь является таким, что положение транспортного средства смещается в пределах полосы движения для проезда, чтобы избегать ожидаемого столкновения.
13. Способ управления по п. 10, в котором путь является таким, что скорость транспортного средства настраивается, чтобы учитывать объект в пределах полосы движения для проезда.
14. Способ управления по п. 10, дополнительно состоящий в том, что принимают дополнительные данные от других транспортных средств и автоматически управляют направлением движения транспортного средства по другому пути.
15. Способ управления по п. 10, дополнительно состоящий в том, что, в ответ на прием данных, указывающих инициированный находящимся в транспортном средстве человеком запрос принудительной отмены, отменяют автоматическое рулевое управление.
| US 8838372 B2, 16.09.2014 | |||
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА С ДИНАМИЧЕСКИМ ПРЕПЯТСТВИЕМ | 2012 |
|
RU2526144C2 |

