Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к контуру управления текучей средой, а конкретно к контуру управления регулятора тормоза прицепа и рабочей машины.
Уровень техники
[0002] В комбинациях трактора и прицепа на прицепе обычно требуется тормозная система, которая включается, когда избирательно включается тормозная система трактора. Часто тормозная система прицепа соединена с тормозной системой трактора, позволяя трактору одновременно применять тормозную систему трактора и прицепа. Тормозные системы прицепа часто содержат гидравлический компонент и пневматический компонент. оператор может модулировать пневматический компонент системы, но не гидравлический компонент.
Раскрытие изобретения
[0003] В одном варианте осуществления настоящего изобретения тормозная система прицепа и рабочей машины содержит источник находящейся под давлением текучей среды; гидравлический основной клапан, соединенный с источником по текучей среде, при этом гидравлический основной клапан содержит впуск и выпуск; пневматический основной клапан, соединенный с источником по текучей среде, при этом пневматический основной клапан содержит впуск и выпуск; пропорциональный клапан управления, соединенный с источником по текучей среде, при этом пропорциональный клапан управления содержит выпуск, находящийся в сообщении по текучей среде с впусками гидравлического основного клапана и пневматического основного клапана; гидравлический выход, выполненный с возможностью соединения по текучей среде с гидравлической тормозной системой прицепа, при этом гидравлический выход соединен по текучей среде с выпуском гидравлического основного клапана; и пневматический выход, выполненный с возможностью соединения по текучей среде с пневматической тормозной системой прицепа, при этом пневматический выход соединен по текучей среде с выпуском пневматического основного клапана.
[0004] В одном примере данного варианта осуществления тормозная система может содержать электромагнитный клапан, находящийся в сообщении по текучей среде с пропорциональным клапаном управления, при этом электромагнитный клапан выполнен с возможностью перемещения между открытым положением, в котором пропорциональный клапан управления соединен по текучей среде с гидравлическим основным клапаном и пневматическим основным клапаном, и закрытым положением, в котором пропорциональный клапан управления не соединен по текучей среде с гидравлическим основным клапаном и пневматическим основным клапаном. Во втором примере тормозная система может содержать контроллер и электромагнит электромагнитного клапана, находящийся в электрическом сообщении с контроллером, при этом перемещение электромагнитного клапана между открытым и закрытым положениями функционально регулируется контроллером. В третьем примере тормозная система может содержать контроллер; рабочий тормозной клапан, выполненный с возможностью обеспечения текучей среды при приведении в действие рабочего тормоза рабочей машины; датчик, находящийся в электрическом сообщении с контроллером, при этом датчик выполнен с возможностью определения тормозного давления из рабочего тормозного клапана; при этом контроллер определяет команду торможения в зависимости от тормозного давления, и на основании команды торможения функционально регулирует пропорциональный клапан управления.
[0005] В четвертом примере контроллер получает команду предварительного торможения и функционально регулирует выход пропорционального клапана управления в зависимости от тормозного давления и команды предварительного торможения. В пятом примере тормозная система может содержать челночный клапан с возможностью перемещения между первым положением и вторым положением, при этом челночный клапан соединен по текучей среде между пропорциональным клапаном управления и рабочим тормозным клапаном; при этом челночный клапан находится в первом положении, когда тормозное давление из рабочего тормозного клапана больше, чем выходное давление из пропорционального клапана управления, и челночный клапан находится во втором положении, когда тормозное давление из рабочего тормозного клапана меньше, чем выходное давление из пропорционального клапана управления. В дополнительном примере тормозная система может быть выполнена таким образом, что в первом положении рабочий тормозной клапан непосредственно соединен по текучей среде с гидравлическим и пневматическим основными клапанами, а челночный клапан блокирует соединение с прохождением текучей среды между пропорциональным клапаном управления и гидравлическим и пневматическим основными клапанами; а во втором положении пропорциональный клапан управления непосредственно соединен по текучей среде с гидравлическим и пневматическим основными клапанами, а челночный клапан блокирует соединение с прохождением текучей среды между рабочим тормозным клапаном и гидравлическим и пневматическим основными клапанами.
[0006] В еще одном варианте осуществления данного изобретения способ управления находящейся под давлением текучей средой в тормозную систему прицепа включает обеспечение контроллера, источника гидравлической жидкости, источника рабочего газа пневмосистемы, тормозной системы рабочей машины, гидравлического тормозного выхода, пневматического тормозного выхода, гидравлического основного клапана, соединенного по текучей среде с гидравлическим тормозным выходом, пневматического основного клапана, соединенного по текучей среде с пневматическим тормозным выходом, пропорционального клапана управления, соединенного по текучей среде с источником гидравлической жидкости, электромагнитного клапана и челночного клапана; определение датчиком тормозного давления в тормозной системе рабочей машины; передачу тормозного давления в контроллер посредством датчика; идентификацию контроллером команды предварительного торможения для пропорционального клапана управления; определение контроллером команды торможения в зависимости от тормозного давления и команды предварительного торможения; регулирование контроллером выходного давления пропорционального клапана управления в зависимости от команды торможения; и выведение давления управления в гидравлический основной клапан и пневматический основной клапан на основании большего из выходного давления пропорционального клапана управления и тормозного давления тормозной системы рабочей машины.
[0007] В одном примере данного варианта осуществления способ может включать обеспечение первого тормоза и второго тормоза тормозной системы рабочей машины, при этом первый тормоз генерирует первое тормозное давление, а второй тормоз генерирует второе тормозное давление; соединение по текучей среде первого датчика с первым тормозом для определения первого тормозного давления и второго датчика со вторым тормозом для определения второго тормозного давления, при этом первый датчик и второй датчик электрически соединены с контроллером; при этом этап определения включает вычисление команды торможения в зависимости от первого тормозного давления, второго тормозного давления и команды предварительного торможения.
[0008] Во втором примере этап определения может включать умножение команды предварительного торможения на среднее из первого и второго тормозных давлений. В третьем примере этап определения может включать умножение команды предварительного торможения либо на более высокое, либо на более низкое из первого и второго тормозных давлений. В четвертом примере этап регулирования может включать вычисление команды торможения в зависимости от первого тормозного давления, второго тормозного давления и команды предварительного торможения; сравнение команды торможения с командой предварительного торможения; и вывод тока в пропорциональный клапан управления на основании большей из команды торможения и команды предварительного торможения. В пятом примере этап выведения может включать приведение челночного клапана в первое положение или во второе положение на основании большего из выходного давления пропорционального клапана управления и тормозного давления тормозной системы рабочей машины.
[0009] В другом примере этап регулирования может включать определение величины тока, пропорциональной определенному тормозному давлению; и отправку величины тока контроллером в пропорциональный клапан управления; при этом величина тока регулируется на основании команды предварительного торможения. В дополнительном примере способ может включать управляемое регулирование команды предварительного торможения для пропорционального клапана управления. В еще одном дополнительном примере способ может включать соединение по текучей среде электромагнитного клапана между пропорциональным клапаном управления и челночным клапаном; электрическое соединение электромагнита электромагнитного клапана с контроллером; и функциональное регулирование перемещения электромагнитного клапана между открытым положением и закрытым положением, при этом в открытом положении выходное давление пропорционального клапана управления гидравлически или пневматически соединено с челночным клапаном, а в закрытом положении выходное давление пропорционального клапана управления не соединено гидравлически или пневматически с челночным клапаном. В еще одном примере в закрытом положении рабочий тормозной клапан непосредственно соединен по текучей среде с гидравлическим основным клапаном и пневматическим основным клапаном.
[0010] В дополнительном варианте осуществления данного изобретения тормозная система комбинации трактора с прицепом содержит контроллер; источник находящейся под давлением текучей среды; первый тормоз и второй тормоз трактора, причем первый тормоз обеспечивает первое тормозное давление, а второй тормоз обеспечивает второе тормозное давление; первый челночный клапан, находящийся в сообщении по текучей среде с первым тормозным давлением и вторым тормозным давлением; гидравлический основной клапан, соединенный с источником по текучей среде, при этом гидравлический основной клапан содержит впуск и выпуск, при этом впуск соединен по текучей среде с первым челночным клапаном; пневматический основной клапан, соединенный с источником по текучей среде, при этом пневматический основной клапан содержит впуск и выпуск, при этом впуск пневматического основного клапана соединен по текучей среде с впуском гидравлического основного клапана; пропорциональный клапан управления, соединенный с источником по текучей среде; второй челночный клапан, соединенный по текучей среде между пропорциональным клапаном управления и первым челночным клапаном; гидравлический выход, соединенный по текучей среде с выпуском гидравлического основного клапана и выполненный с возможностью соединения по текучей среде с гидравлической тормозной системой прицепа; и пневматический выход, соединенный по текучей среде с выпуском пневматического основного клапана и выполненный с возможностью соединения по текучей среде с пневматической тормозной системой прицепа; при этом контроллер функционально регулирует выходное давление пропорционального клапана управления в зависимости от регулируемой команды торможения; кроме того при этом давление управления передается по текучей среде в гидравлический основной клапан и пневматический основной клапан, при этом давление управления представляет собой функцию первого тормозного давления, второго тормозного давления и выходного давления.
[0011] В одном примере данного варианта осуществления система может содержать электромагнитный клапан, находящийся в сообщении по текучей среде между пропорциональным клапаном управления и вторым челночным клапаном, при этом электромагнитный клапан выполнен с возможностью перемещения между открытым положением, в котором пропорциональный клапан управления соединен по текучей среде со вторым челночным клапаном, и закрытым положением, в котором пропорциональный клапан управления не соединен по текучей среде со вторым челночным клапаном. В другом примере система может содержать дисплей оператора для передачи команды предварительного торможения в контроллер; при этом команда торможения определяется контроллером в зависимости от команды предварительного торможения, первого тормозного давления и второго тормозного давления; кроме того при этом выходное давление пропорционального клапана управления представляет собой функцию тока, обеспеченного контроллером в пропорциональный клапан управления в зависимости от команды торможения.
Краткое Описание Чертежей
[0012] Упомянутые выше аспекты настоящего изобретения и способ их получения станут более очевидны, а само изобретение станет более понятным посредством ссылки на следующее описание вариантов осуществления изобретения, сделанное в сочетании с сопровождающими чертежами, на которых:
[0013] Фиг.1 представляет собой вид сбоку комбинированной системы трактора и прицепа;
[0014] Фиг.2 представляет собой схематичный вид управления гидравлической системы комбинированной тормозной системы трактора и прицепа;
[0015] Фиг.3 представляет собой схематичный вид управления комбинированной гидравлической и пневматической системы комбинированной тормозной системы трактора и прицепа;
[0016] Фиг.4 представляет собой схему контура управления тормозами прицепа; и
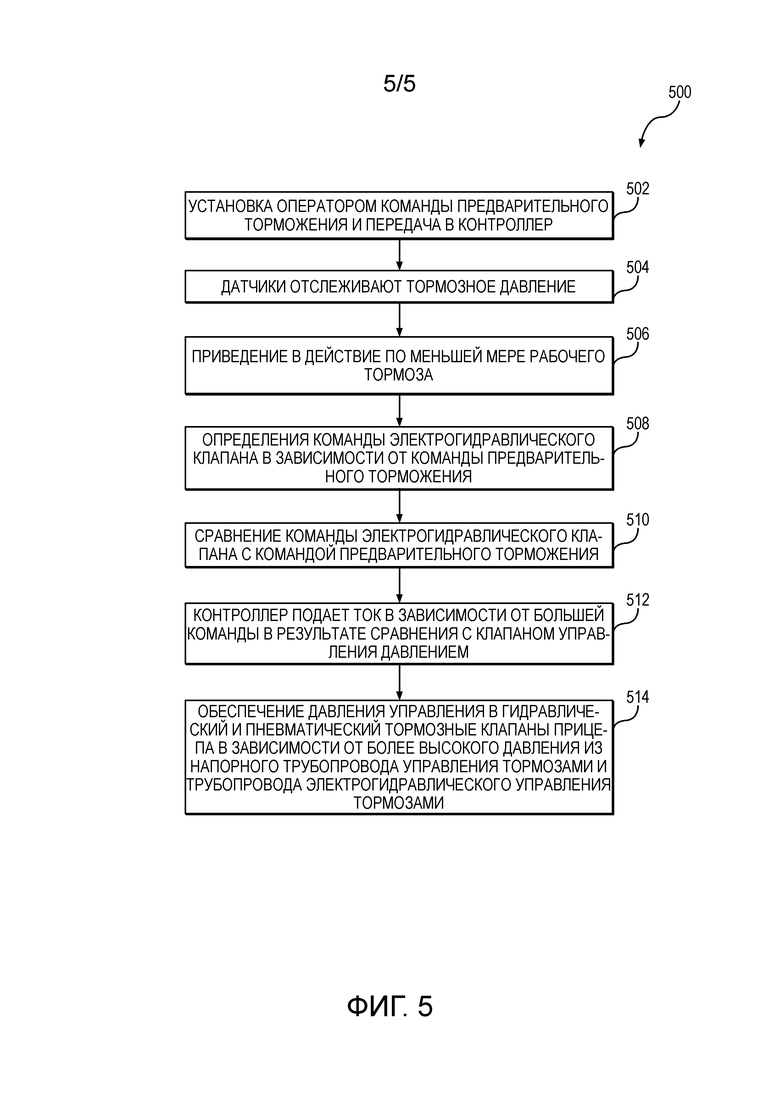
[0017] Фиг.5 представляет собой блок-схему способа управления для управления комбинированной тормозной системой трактора и прицепа.
[0018] Соответствующие ссылочные номера используют для обозначения соответствующих деталей на нескольких изображениях.
Подробное описание изобретения
[0019] Варианты осуществления настоящего изобретения, описанные ниже, не являются исчерпывающими или ограничивающими изобретение точными формами в следующем подробном описании. Скорее, варианты осуществления выбраны и описаны так, чтобы другие специалисты в данной области смогли оценить и понять принципы и варианты практического использования настоящего изобретения.
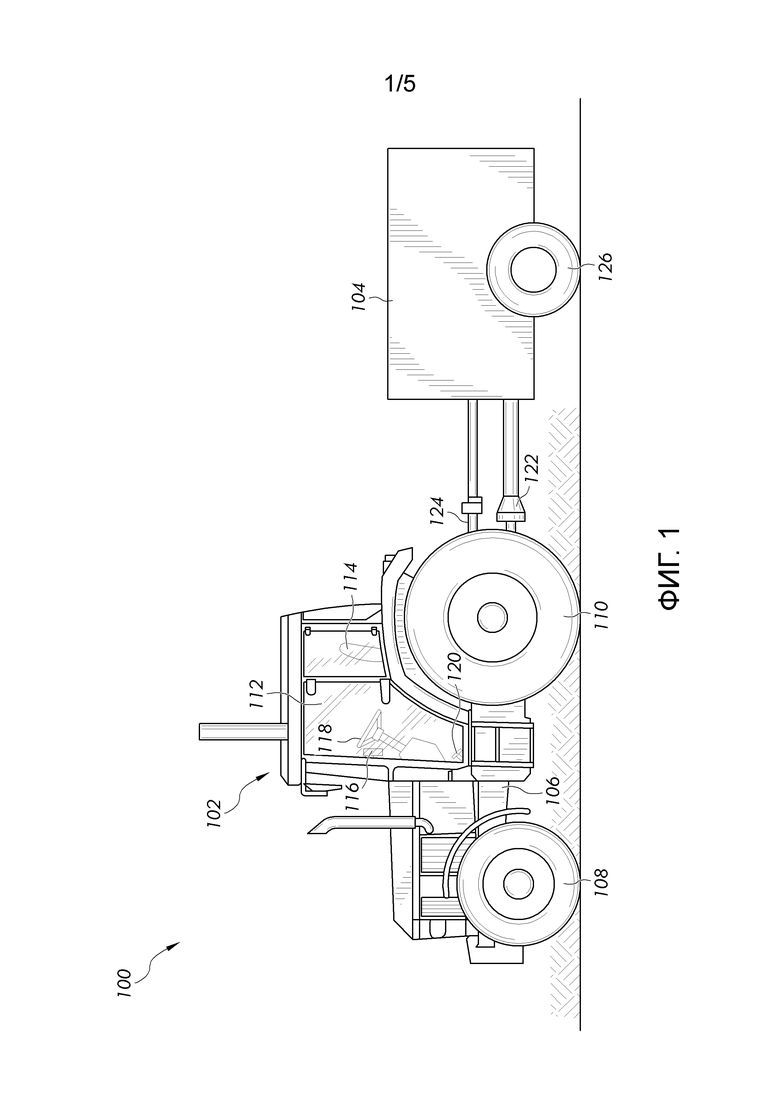
[0020] Со ссылкой на фиг.1, показана комбинированная система 100 трактора и прицепа. В этой системе трактор 102 показан присоединенным и тянущим прицеп 104. Трактор 102 может иметь шасси 106, которое расположено между передними входящими в зацепление с землей механизмами 108 и задними входящими в зацепление с землей механизмами 110. В варианте осуществления фиг.1 каждый входящий в зацепление с землей механизм представлен в виде колеса, образованного вдоль соответствующей оси, т.е. передней оси и задней оси. Однако, в других вариантах осуществления входящим в зацепление с землей механизмом может быть гусеница, которая продвигает трактор 102 по земной поверхности. Более того, прицеп 104 также может содержать по меньшей мере один входящий в зацепление с землей механизм, такой как колесо 126.
[0021] С шасси 106 может быть соединена кабина 112, которая образует место для расположения оператора на операторском сиденье 114. Из кабины оператор может управлять трактором 102 и прицепом 104 посредством множества органов управления. Как показано, кабина 112 может содержать дисплей 116 или панель приборов, которая визуально показывает характеристики управления трактора 102 или прицепа 104, такие как скорость, мощность, температура, давление, направление и любой другой тип характеристики управления. Дисплеем 116 может быть сенсорный дисплей, который содержит один или более органов управления оператора для избирательного управления работой трактора 102 или прицепа 104. Другие органы управления могут включать рулевое колесо или ручку 118 управления, педаль 120 (напр., педаль тормоза, педаль сцепления или педаль дроссельной заслонки), любой другой тип управления, такой как джойстик, переключатель, рычаг, ручку и т.д., для управления системой 100 прицепа и трактора.
[0022] Несмотря на то, что в данном документе показан и описан трактор 102, любой тип рабочей машины может использовать идеи этого изобретения, и, вследствие этого, не предполагается ограничение его применения только тракторами. В других вариантах осуществления идеи этого изобретения может использовать грузовой автомобиль, выполненный с возможностью буксирования прицепа. Соответственно, трактором 102 может быть любой тип рабочей машины, используемой для буксирования прицепа.
[0023] Трактор 102 может быть соединен с прицепом 104 посредством сцепного элемента или тягового бруса 122. Сцепной элемент или тяговый брус 122 может быть достаточно прочным для передачи хода трактора 102 прицепу 104. В одном варианте осуществления, когда трактор 102 движется в направлении вперед, сцепной элемент 122 тянет прицеп 104 за собой приблизительно в том же самом направлении.
[0024] Также может быть предусмотрен один или более трубопроводов 124 для текучей среды. Для целей данного изобретения текучая среда может представлять собой газ или жидкость. Таким образом, любой пневматический или гидравлический трубопровод в данном документе может упоминаться, как трубопровод для текучей среды. Один или более трубопроводов 124 для текучей среды могут избирательно соединять тормозную систему трактора с тормозной системой прицепа по текучей среде. Более конкретно, трактор 102 может обеспечивать выход для торможения прицепа, который связан с тормозной системой прицепа. В такой конфигурации, когда пользователь подает команду торможения, одновременно могут включаться как тормозная система трактора, так и тормозная система прицепа для замедления трактора 102 и прицепа 104.
[0025] В некоторых системах тракторов и прицепов для применения рабочего тормоза трактора оператор может задействовать одну или более педалей тормозов. Для применения тормозов тормозные приводы могут находиться под давлением, что будет описано более подробно ниже со ссылкой на фиг.2. После того, как оператор подает команду включения тормозной системы трактора, тормозная система прицепа также должна включаться для предотвращения контакта или столкновения прицепа с задним концом трактора. Во многих обычных тормозных системах может иметься единственный гидравлический трубопровод, который соединен между тормозными системами трактора и прицепа. В дополнение, единственный гидравлический тормозной клапан прицепа может иметь связанный с ним благодаря его геометрии фиксированный коэффициент усиления. Таким образом, в зависимости от фиксированного коэффициента усиления, величина давления, поступающего в клапан, умножается на фиксированный коэффициент усиления для обеспечения заданного выпускного давления. Так как изменяются тормозные системы, и изменяются новые федеральные и международные директивы или стандарты, существует потребность как в более низких, так и в более высоких выпускных давлениях в зависимости от типа прицепа. В результате, является желательным регулируемый коэффициент усиления в гидравлическом тормозном клапане прицепа по сравнению с клапаном с фиксированным коэффициентом усиления. Из принципов и идей настоящего изобретения станут очевидны другие требования и преимущества.
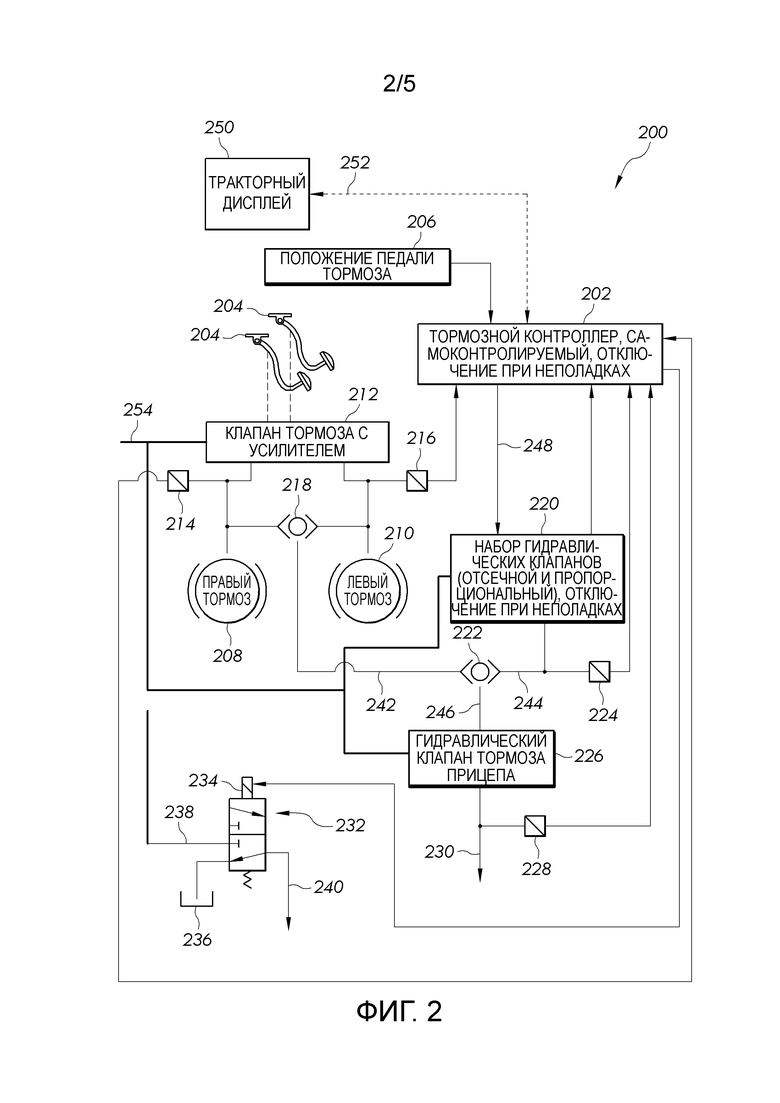
[0026] В некоторых системах тракторов и прицепов тормозная система прицепа содержит гидравлическую тормозную систему, пневматическую тормозную систему или их комбинацию. На фиг.2 показан пример тормозной системы прицепа. Как показано, в данном варианте осуществления гидравлическая тормозная система 200 трактора и прицепа может содержать тормозной контроллер 202. Тормозной контроллер 202 может быть в электрическом сообщении с контроллером транспортного средства (не показано), контроллером двигателя (не показано), контроллером трансмиссии (не показано) и любым другим типом контроллера для управления трактором или прицепом. Тормозной контроллер 202 может содержать множество входов и выходов для приема и передачи электрических сигналов или команд различным составным элементам в тормозной системе 200. На фиг.2, например, тормозной контроллер 202 может находиться в электрическом сообщении с дисплеем 250 трактора. Эта связь может осуществляться по шине 252 сети локальных контроллеров (CAN) или линии связи. Дисплей 250 может позволять оператору избирательно передавать команды тормозному контроллеру 202 для управления тормозной системой трактора или тормозной системой 200 прицепа.
[0027] Другие органы управления оператора также могут быть в сообщении с тормозным контроллером 202. Например, оператор может избирательно включать одну или более педалей 204 тормозов. Датчик 206 положения тормоза может определять перемещение одной или более педалей 204 тормозов и передавать это перемещение тормозному контроллеру 202. При применении одной или более педалей 204 тормозов, тормозной клапан 212 может запускаться таким образом, что текучая среда из подающего трубопровода 254 гидросистемы (посредством насоса или другого источника давления) доставляется в тормозные приводы. В свою очередь, тормозные приводы управляемо приводятся в действие для подачи гидравлического тормозного давления в тормозную систему трактора для регулирования скорости трактора. На фиг.2 проиллюстрирован правый тормозной привод 208 и левый тормозной привод 210 тормозной системы 200. Вследствие этого, в данном варианте осуществления для включения тормозной системы трактора оператор может нажимать правую педаль тормоза и левую педаль тормоза. Правая педаль тормоза и правый тормозной привод 208 могут управлять тормозным давлением рабочего тормоза на правом, заднем колесе трактора, а левая педаль тормоза и левый тормозной привод могут управлять тормозным давлением рабочего тормоза на левом, заднем колесе трактора. При этом правый тормозной привод 208 и левый тормозной привод 210 подают гидравлическое давление в рабочий тормоз трактора для замедления транспортного средства. Это гидравлическое давление также может подаваться в тормозную систему прицепа, как будет описано ниже.
[0028] Как известно, для торможения трактора и замедления его скорости оператор может применять педали тормозов. В дополнение, оператор может плавно применять или нажимать на педаль тормоза, как это часто бывает с оператором, желающим отключить круиз-контроль в автомобиле. В системе трактора и прицепа может быть желательно начинать торможение прицепа, как только тормозной контроллер 202 обнаруживает включение одной или более педалей 204 тормозов. В этом примере тормозной контроллер 202 может выполнять процедуру или алгоритм предварительного торможения для начала применения тормозной системы прицепа. В варианте осуществления фиг.2 датчик 206 положения педали тормоза может посылать сигнал тормозному контроллеру 202, показывая, что оператор начал нажимать педали 204. Перед тем, как генерируется какое-либо тормозное давление или существенная величина тормозного давления, тормозной контроллер 202 может выполнять процедуру предварительного торможения и посылать сигнал в тормозную систему прицепа начинать торможение прицепа. Этим сигналом может быть регулируемый или пропорциональный сигнал от тормозного контроллера 202. Сигнал может быть принят тормозным клапаном прицепа, который содержит первый электромагнитный клапан и второй двухходовой позиционный клапан (т.е. двухпозиционный клапан). В одном примере для начала операции торможения из клапана в тормоза прицепа может подаваться давление до семи бар.
[0029] Во время этой процедуры предварительного торможения первый электромагнитный клапан может получать сигнал от тормозного контроллера и подавать гидравлическое давление в тормоза прицепа. Второй, двухходовой позиционный клапан может находиться в открытом положении, обеспечивая передачу через него давления текучей среды. Однако, если в системе выявляется повреждение, второй, двухходовой позиционный клапан может приводиться в выключенное или закрытое положение для блокировки подачи давления текучей среды в тормозную систему прицепа. Это условие «остановки при неполадке» может использоваться для защиты от возможных неполадок в системе. В любом случае гидравлическое давление все еще может проходить через главный гидравлический тормозной клапан 226 прицепа (Фиг.2), так чтобы тормозная система прицепа включалась во время операции торможения. Однако, набор клапанов предварительного торможения может выключаться или закрываться таким образом, чтобы никакое выходное давление не проходило через набор клапанов в тормоза прицепа.
[0030] На фиг.2 первый датчик 214 давления может определять гидравлическое тормозное давление из правого тормозного привода 208, а второй датчик 216 давления может определять из левого тормозного привода 210. Первый и второй датчики могут быть в электрическом сообщении с тормозным контроллером 202. Эта электрическая связь может быть либо проводной, либо беспроводной связью, или любой другой известной или подлежащей разработке формой связи. В результате, тормозной контроллер 202 может отслеживать тормозное давление из обоих приводов.
[0031] Челночный клапан 218 может находиться в сообщении по текучей среде с правым тормозным приводом 208 и с левым тормозным приводом 210. Челночный клапан 218 может приводиться в перемещение в каждом направлении в зависимости от того, какое тормозное давление является наибольшим. В связи с этим, через челночный клапан 218 проходит большее из двух тормозных давлений, которое называется давление управления тормоза. На фиг.2 давление управления тормоза из челночного клапана 218 проходит дальше по трубопроводу 242 управления тормоза.
[0032] Тормозная система 200 фиг.2 также может содержать набор 220 гидравлических клапанов. Этот набор 220 клапанов может быть аналогичен упомянутому выше набору клапанов предварительного торможения в том, что он содержит как пропорциональный электромагнитный клапан, так и двухходовой отсечной клапан. Как показано, тормозной контроллер 202 может быть в электрическом сообщении с набором 220 гидравлических клапанов для регулирования их работы. Например, команда 248 торможения прицепа может передаваться из тормозного контроллера 202 набору 220 клапанов. Кроме того, набор 220 клапанов может посылать сигналы тормозному контроллеру 202 в ответ на его работу (т.е. датчик 224 давления может передавать в контроллер 202 давление, связанное с набором клапанов).
[0033] Выпускное давление из набора 220 гидравлических клапанов может проходить по трубопроводу 244 для текучей среды, как показано на фиг.2. Трубопровод 244 с набором гидравлических клапанов для текучей среды и трубопровод 242 управления тормоза могут сходиться во втором челночном клапане 222. Аналогично работе первого челночного клапана 218, большее из давления управления тормоза и давления набора гидравлических клапанов может проходить через второй челночный клапан 222 и поступать в гидравлический трубопровод 246. Давление в гидравлическом трубопроводе 246 может называться гидравлическое давление управления. Датчик 228 давления может определять гидравлическое давление управления и передавать это давление тормозному контроллеру 202, как показано на фиг.2. Это гидравлическое давление управления может проходить по гидравлическому управляющему трубопроводу 230 тормоза прицепа в тормоза прицепа.
[0034] В системе 200 фиг.2 прицеп также может содержать стояночный тормоз прицепа. Стояночным тормозом прицепа можно функционально управлять посредством гидравлического клапана 232 управления стояночного тормоза прицепа. Этот клапан 232 может содержать электромагнит 234, который находится в электрическом сообщении с тормозным контроллером 202. Гидравлический клапан 232 управления стояночного тормоза прицепа может смещаться в пропускающее положение, позволяющее давлению проходить по дополнительному гидравлическому трубопроводу 240. Как показано, клапан 232 также может быть в сообщении по текучей среде с баком или резервуаром 236. В связи с этим, гидравлическое давление может подаваться из подающего трубопровода 238 в гидравлический клапан 232 управления стояночного тормоза прицепа, и в его нормальном или смещенном открытом положении давление проходит через него в гидравлический дополнительный трубопровод 240 тормоза прицепа.
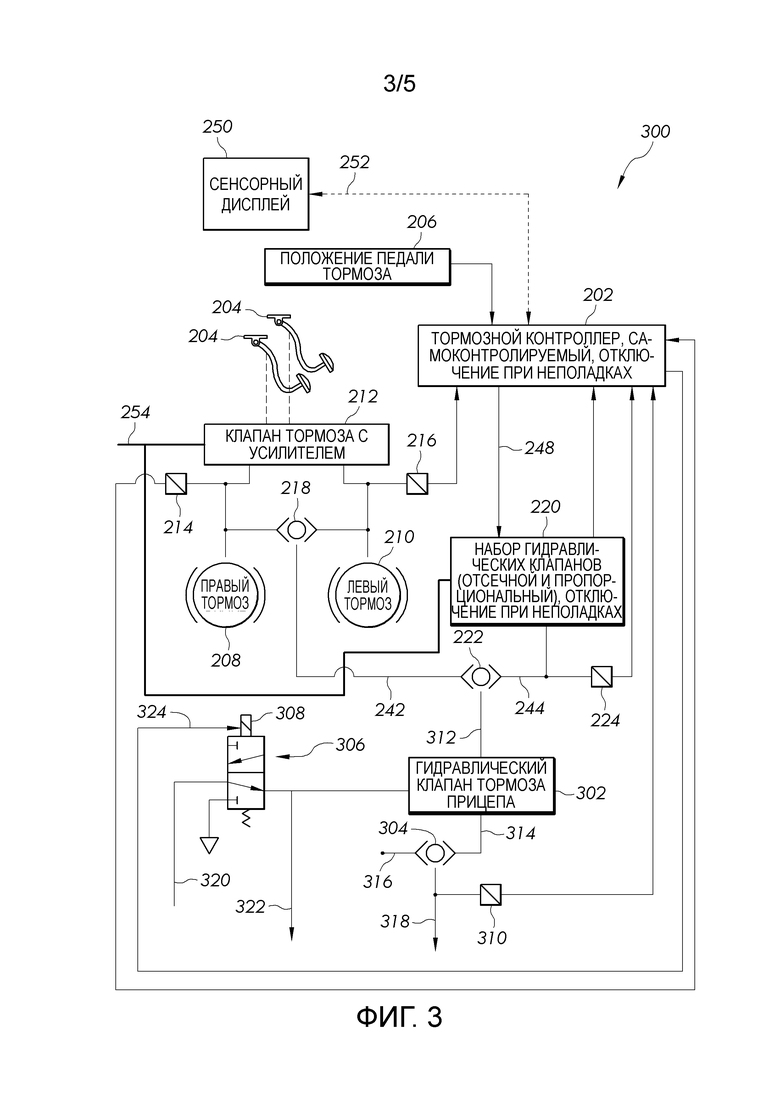
[0035] Со ссылкой на фиг.3, часть тормозной системы 200 фиг.2 удалена, и показана воздушная или пневматическая тормозная система 300 прицепа. Как описано выше, тормозная система прицепа может быть гидравлической, пневматической или их комбинацией. В данном изобретении в пневматической тормозной системе прицепа для управления тормозами может использоваться любой вид газа. Однако, с целью упрощения в остальной части этого изобретения тип газа будет называться воздухом. Таким образом, пневматическая тормозная система 300 прицепа будет называться воздушная тормозная система 300 прицепа, но должно быть понятно, что для регулирования тормоза прицепа может использоваться любой тип газа.
[0036] На фиг.3 воздушная тормозная система 300 прицепа может содержать воздушный или пневматический тормозной клапан 302 прицепа. Воздушный тормозной клапан 302 прицепа может быть расположен дальше второго челночного клапана 222 гидравлической системы 200, так что гидравлическое давление используется в качестве впуска для управления клапаном 302. Гидравлическое давление может проходить по трубопроводу 312 контура управления во впуск воздушного тормозного клапана 302 прицепа.
[0037] В дополнение к воздушному тормозному клапану 302 прицепа, воздушная тормозная система 300 прицепа также может содержать трубопровод 320 подачи воздуха, челночный клапан 304, клапан управления воздушного стояночного тормоза прицепа (не показано) и клапан 306 определения утечки. Челночный клапан 304 расположен дальше воздушного тормозного клапана 302 прицепа и клапана управления воздушного стояночного тормоза прицепа. Таким образом, давление воздуха может выводиться из воздушного тормозного клапана 302 прицепа посредством первого напорного трубопровода 314, а из клапана управления воздушного стояночного тормоза прицепа посредством второго напорного трубопровода 316. Большее из двух давлений из первого и второго трубопровода может инициировать открывание челночного клапана 304 так, чтобы давление воздуха могло проходить по первому воздушному управляющему трубопроводу 318 тормоза прицепа в воздушные тормоза прицепа. Датчик 310 давления может быть в сообщении по текучей среде с управляющим трубопроводом 318, чтобы определять давление и передавать его тормозному контроллеру 202.
[0038] Клапан 306 определения утечки может быть в виде обычно открытого электромагнитного клапана управления. Клапан 306 может содержать электромагнит 308, который находится в электрическом сообщении с тормозным контроллером 202. В связи с этим, тормозной контроллер 202 может регулировать клапан 306 определения утечки между открытым и закрытым положениями посредством линии 324 связи с электромагнитом 308.
[0039] Давление воздуха может подаваться по подающему трубопроводу 320 в клапан 306 определения утечки. Поскольку клапан 306 определения утечки может смещаться в открытое положение, текучая среда может проходить через клапан 306 в воздушный тормозной клапан 302 прицепа и в воздушный подающий трубопровод 322 тормоза прицепа.
[0040] Варианты осуществления фигур 2 и 3 являются иллюстрацией только одного примера тормозной системы для комбинации трактора и прицепа. Возможны другие варианты осуществления тормозной системы, которые находятся в пределах объема правовых притязаний этого изобретения. Например, в еще одном варианте осуществления можно задействовать один или более электрoгидравлических дополнительных тормозных клапанов.
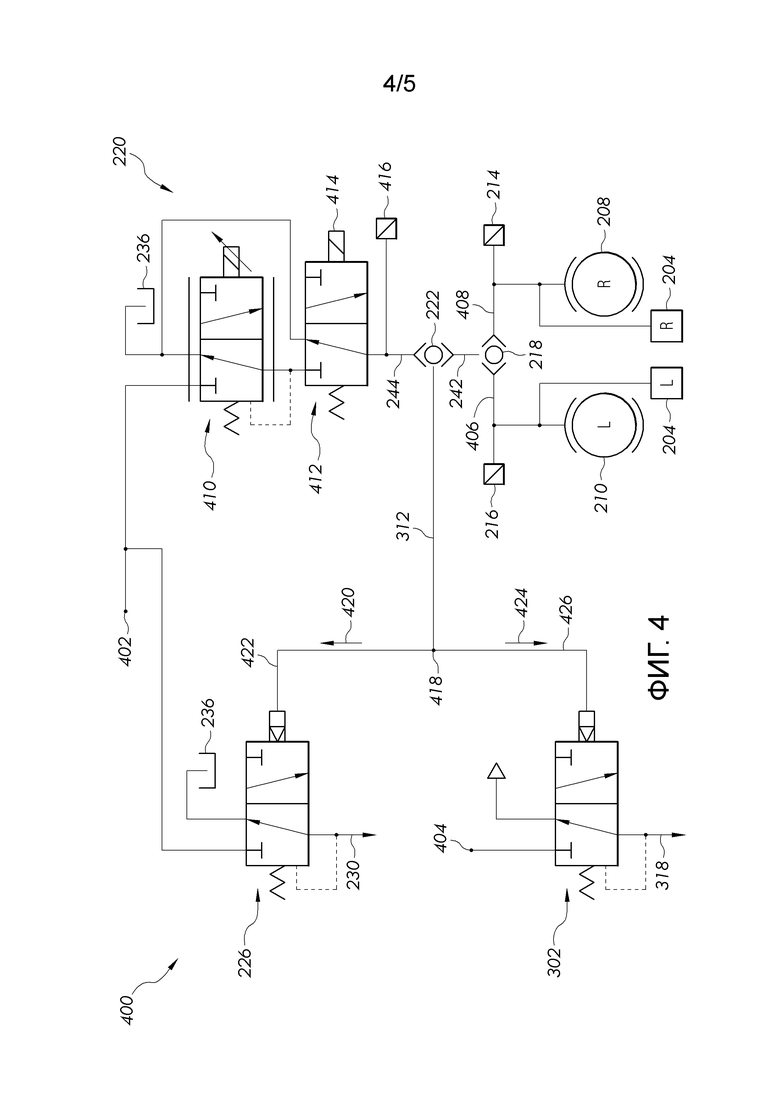
[0041] Со ссылкой на фиг.4, показана система или контур 400 управления тормозами прицепа. Обычный прицеп, буксируемый рабочей машиной, такой как трактор, может иметь изменяющиеся уровни эффективности торможения. Для должного управления торможением транспортного средства в виде трактора с прицепом, может быть полезно управляемое модулирование давления торможения трактора с прицепом. Это может проделываться оператором рабочей машины. В новых правительственных постановлениях в Европе необходима регулируемая эффективность торможения прицепа.
[0042] В обычной сельскохозяйственной машине, такой как комбинация трактора и прицепа, для регулировки эффективности пневматических тормозов прицепа может использоваться набор электрогидравлических клапанов управления давлением. Однако, в этих обычных системах управления оператор не регулирует эффективность гидравлических тормозов прицепа. Таким образом, система 400 на фиг.4 разработана для регулирования эффективности гидравлических тормозов прицепа, используя набор электрогидравлических клапанов управления давлением. Таким образом, гидравлический контур может использоваться для одновременного управления сигналом давления управления как в гидравлический тормозной клапан прицепа и в пневматический тормозной клапан прицепа таким образом, чтобы оператор мог регулировать эффективность как гидравлических, так и пневматических тормозов прицепа.
[0043] Со ссылкой на вариант осуществления фиг.4, система 400 управления содержит гидравлический тормозной клапан 226 прицепа и пневматический тормозной клапан 302 прицепа, как описано выше на фиг.2 и 3. Система 400 содержит источник гидравлической жидкости 402 и источник рабочего газа 404 пневмосистемы, такого как воздух. Рабочая машина или трактор (не показано) может содержать тормозную систему с левым рабочим тормозом и правым рабочим тормозом 204. Левый рабочий тормоз может управлять левой задней осью машины, а правый рабочий тормоз может управлять правой задней осью машины. Во время работы машины оператор может применять рабочие тормоза 204 для гидравлического управления торможением трактора или рабочей машины. Левый гидравлический привод 210 и правый гидравлический привод 208 могут предоставлять гидравлическую жидкость в левый напорный тормозной трубопровод 406 и правый напорный тормозной трубопровод 408, соответственно. Первый датчик 214 давления может измерять или определять давление в правом напорном тормозном трубопроводе 408, а второй датчик 216 давления может измерять или определять давление в левом напорном тормозном трубопроводе 406. Каждый из первого и второго датчиков может находиться в электрическом сообщении с тормозным контроллером 202, чтобы передавать давления в каждом трубопроводе.
[0044] Так как давление создается в каждом напорном трубопроводе, первый челночный клапан 218 может регулировать величину давления в напорном трубопроводе 242 управления тормозами на основании более высокого из двух тормозных давлений. Таким образом, если давление в левом напорном тормозном трубопроводе 406 больше, чем давление в правом напорном тормозном трубопроводе 408, то первый челночный клапан 218 будет приходить в действие, позволяя давлению в левом напорном тормозном трубопроводе 406 проходить через и в напорный трубопровод 242 управления торможением. То же самое справедливо, если давления являются обратными.
[0045] Система 400 по фиг.4 также может содержать набор электрогидравлических клапанов, аналогичный набору 220 гидравлических клапанов фиг.2. В данном случае, набор 220 гидравлических клапанов может содержать первый клапан и второй клапан. Первым клапаном может быть пропорциональный электромагнитный клапан 410 с регулируемым давлением, который может управляемо регулироваться для получения изменяемого выпускного давления. Этот клапан может выпускать гидравлическое давление между 0-35 бар, хотя другие варианты осуществления могут варьировать по величине выпускного давления из клапана. Тормозной контроллер 202, например, может посылать в клапан 410 управления ток для получения требуемого давления. Оператор может управлять коэффициентом усиления в наборе 220 клапанов посредством дисплея 250, как описано выше. Например, используя дисплей 250 оператор может установить коэффициент усиления на определенное значение, и этот коэффициент усиления может передаваться в тормозной контроллер 202. Этот коэффициент усиления может сохраняться контроллером 202 в его запоминающем блоке. Кроме того, оператор может по необходимости регулировать коэффициент усиления. Например, если оператор отсоединяет более новый прицеп и присоединяет к трактору более старый прицеп, оператор может, соответственно, отрегулировать коэффициент усиления.
[0046] Вторым клапаном может быть многопозиционный клапан, напр., двухходовой или трехходовой, двухпозиционный электромагнитный клапан 412. Электромагнитный клапан 412 может содержать электромагнит 414, который находится в электрическом сообщении с тормозным контроллером 202. Клапан 412 может смещаться в открытое положение, позволяя текучей среде проходить через набор 220 клапанов, но, если возникает проблема, аналогичная «самоотключению» в описании выше, многопозиционный клапан 412 может переводиться тормозным контроллером 202 в закрытое положение и отводить давление в бак 236. При этом, электромагнитный клапан 412 блокирует прохождение через набор 220 клапанов.
[0047] Как также показано на фиг.4, датчик или преобразователь 416 давления может располагаться после набора 220 клапанов для измерения выпускного давления в трубопроводе 244 управления электрогидравлическими тормозами. Этот датчик или преобразователь 416 может соответствовать датчику 224 фиг.2, который находится в электрическом сообщении с тормозным контроллером 202 для непрерывной передачи выпускного давления в контроллер 202.
[0048] Система 400 также может содержать второй челночный клапан 222, как показано на фиг.4. Второй челночный клапан 222 может быть подсоединен по текучей среде между напорным трубопроводом 242 управления тормозами и трубопроводом 244 управления электрогидравлическими тормозами. Давлением в напорном трубопроводе 242 управления тормозами может быть фиксированное давление из рабочего тормоза, а давление в трубопроводе 244 управления электрогидравлическими тормозами может регулироваться посредством набора 220 электрогидравлических клапанов. Аналогично первому челночному клапану 218, второй челночный клапан 222 может приводиться в действие в одном или в другом направлении на основании более высокого давления в напорном трубопроводе 242 управления тормозами и в наборе 220 электрогидравлических клапанов. То давление, какое выше, будет проходить через челночный клапан 222 и в гидравлический трубопровод 312 контура управления.
[0049] Гидравлическое давление в гидравлическом трубопроводе 312 контура управления может подаваться как в гидравлический тормозной клапан 226 прицепа, так и в пневматический тормозной клапан 302 прицепа, как показано на фиг.4. Таким образом, оба контура могут управляемо регулироваться посредством набора 220 электрогидравлических клапанов, и оба контура управления (т.е. гидравлический контур и пневматический контур) могут гидравлически регулироваться посредством одного и того же давления управления. Другими словами, в данном варианте осуществления пневматический контур управления использует гидравлическое давление управления, аналогичное гидравлическому контуру, для приведения в действие пневматических тормозов на прицепе. При этом, давлением управления может быть команда в пневматический тормозной клапан 302 прицепа для регулирования пневматического давления в тормозах прицепа посредством пневматического управляющего устройства связи или управляющего трубопровода (напр., первого управляющего трубопровода 318 на фиг.3).
[0050] Давление управления, проходящее по гидравлическому трубопроводу 312 контура управления, может проходить через соединение 418, в котором первая часть проходит в первом направлении 420 в гидравлический тормозной клапан 226 прицепа по первому гидравлическому трубопроводу 422, а вторая часть проходит во втором направлении 424 в пневматический тормозной клапан 302 прицепа по второму гидравлическому трубопроводу 426. Как описано в отношении фиг.2 и 3, гидравлическое давление может проходить через гидравлический тормозной клапан 226 прицепа в гидравлический управляющий трубопровод 230 тормоза прицепа для приведения в действие гидравлических тормозов на прицепе. Кроме того, гидравлическое давление может функционально регулировать пневматический тормозной клапан 302 прицепа, чтобы выпускать пневматическое давление в первый пневматический управляющий трубопровод 318 для приведения в действие пневматических тормозов на прицепе.
[0051] Как описано выше, набор 220 электрогидравлических клапанов может управляемо регулироваться для регулировки команды торможения в гидравлический и пневматический тормозные клапаны прицепа. В данном случае, алгоритм может сохраняться и выполняться контроллером 202. Алгоритм также может принимать вид способа 500 управления, как проиллюстрировано на фиг.5. Способ 500 управления может включать множество блоков или этапов, которые могут выполняться для того, чтобы регулировать гидравлический и пневматический контуры тормозов прицепа. В одном варианте осуществления способ 500 управления может выполняться процессором тормозного контроллера 202, а алгоритм или программное обеспечение, хранящееся в запоминающем блоке контроллера 202, может обеспечивать необходимые команды для выполнения способа 500.
[0052] Первый блок 502, например, может выполняться посредством задания команды предварительного торможения. Командой предварительного торможения может быть коэффициент больше, чем один (1). В этой связи, гидравлическое давление из источника 402 гидравлической жидкости может выводиться посредством набора 202 электрогидравлических клапанов в зависимости от коэффициента или команды предварительного торможения. Например, если команда предварительного торможения установлена на 2,0, то входное давление 15 бар может выводиться из набора 220 клапанов, как 30 бар. Это приводится только в качестве неограничивающего примера, так как потери и тому подобное могут приводить к выходу из набора 220 клапанов изменяющегося давления.
[0053] В любом случае команда предварительного торможения может устанавливаться в блоке 502 оператором, вводящим значение команды на дисплее 250 в кабине трактора или рабочей машины. При этом, по необходимости оператор может непрерывно регулировать команду предварительного торможения. В качестве альтернативы, это значение может определять тормозной контроллер 202 или другой блок управления.
[0054] После того, как блок 502 выполнен, способ 500 может переходить в блок 504, в котором датчики отслеживают тормозное давление. На фиг.4, например, левое тормозное давление и правое тормозное давление могут отслеживаться парой преобразователей или датчиков 214, 216. Эти преобразователи или датчики 214, 216 находятся в электрическом сообщении с тормозным контроллером 202 так, чтобы в блоке 506, когда по меньшей мере один рабочий тормоз приводится оператором в действие, преобразователи или датчики могли передавать в контроллер 202 определенное давление из каждого привода 208, 210.
[0055] Когда контроллер 202 получает тормозные давления от датчиков или преобразователей, он может выполнять блок 508 посредством определения команды электрогидравлического клапана в зависимости от тормозного давления и команды предварительного торможения. Это может достигаться посредством определения среднего из левого и правого тормозных давлений в трубопроводах 406, 408 и умножения среднего на команду предварительного торможения. В качестве альтернативы, контроллер 202 может выбирать максимальное или минимальное тормозное давление и умножать это давление на команду предварительного торможения. В дополнительном варианте осуществления контроллер 202 может быть запрограммирован получать отношение давлений и умножать его на команду предварительного торможения. Способ, которым команда электрогидравлического клапана определяется в блоке 508, может храниться в контроллере и выполняться в виде алгоритма или процедуры. В связи с этим, результат этого блока может управляемо регулироваться оператором посредством установки в любое время в блоке 502 команды предварительного торможения на требуемое значение.
[0056] После того, как в блоке 508 определена команда электрогидравлического клапана, в блоке 510 контроллер 202 может сравнивать команду электрогидравлического клапана с командой предварительного торможения. На основании сравнения, контроллер 202 может выбирать большее из двух значений в блоке 512 и подавать ток в клапан 410 управления. Ток может быть пропорциональным выбранной команде торможения. В блоке 512 контроллер 202 может определять величину тока, которая представляет собой функцию выявленного тормозного давления. Ток может быть пропорциональным выявленному тормозному давлению. В качестве альтернативы, ток может представлять собой множитель или коэффициент выявленного давления. Справочная таблица, формула, графические данные или другое известное средство может использоваться контроллером 202 для определения насколько большой ток подавать в клапан 410 управления. После того, как в блоке 512 определена величина тока для подачи, тормозной контроллер 202 может подавать этот ток в клапан 418, и выходное давление из набора 220 электрогидравлических клапанов проходит во второй челночный клапан 222, как описано выше.
[0057] В блоке 514, больше давление из давления в напорном трубопроводе 242 управления тормозами и трубопроводе 244 управления электрогидравлическими тормозами приводит в действие челночный клапан 222 и поступает в трубопровод 312 контура управления. Таким образом, оператор может управляемо регулировать давление управления в гидравлический тормозной клапан 226 прицепа и пневматический тормозной клапан 302 прицепа в соответствии со способом 500 управления.
[0058] Несмотря на то, что настоящее изобретение было описано в отношении по меньшей мере одного варианта осуществления, оно может быть дополнительно изменено в рамках сущности и объема его правовых притязаний. Вследствие этого, данная заявка охватывает любые варианты, способы применения или приспосабливания изобретения с использованием его общих принципов. Кроме того, данная заявка охватывает такие отклонения от настоящего изобретения, которые попадают в пределы известной или общепринятой практики в области, к которой относится данное изобретение, и которые попадают в рамки объема приложенной формулы изобретения.
Тормозная система прицепа и рабочей машины содержит источник находящейся под давлением текучей среды, гидравлический основной клапан, соединенный с источником по текучей среде, и пневматический основной клапан, соединенный с источником по текучей среде. Пропорциональный клапан управления также соединен с источником по текучей среде, и он содержит выпуск, находящийся в сообщении по текучей среде с впусками гидравлического основного клапана и пневматического основного клапана. Система дополнительно включает гидравлический выход, выполненный с возможностью соединения по текучей среде с гидравлической тормозной системой прицепа, и пневматический выход, выполненный с возможностью соединения по текучей среде с пневматической тормозной системой прицепа. Гидравлический выход соединен по текучей среде с выпуском гидравлического основного клапана, а пневматический выход соединен по текучей среде с выпуском пневматического основного клапана. Технический результат - возможность модулирования как пневматического компонента тормозной системы прицепа и рабочей машины, так и гидравлического компонента, что упрощает работу системы и увеличивает безопасность ее работы. 3 н. и 17 з.п. ф-лы, 5 ил.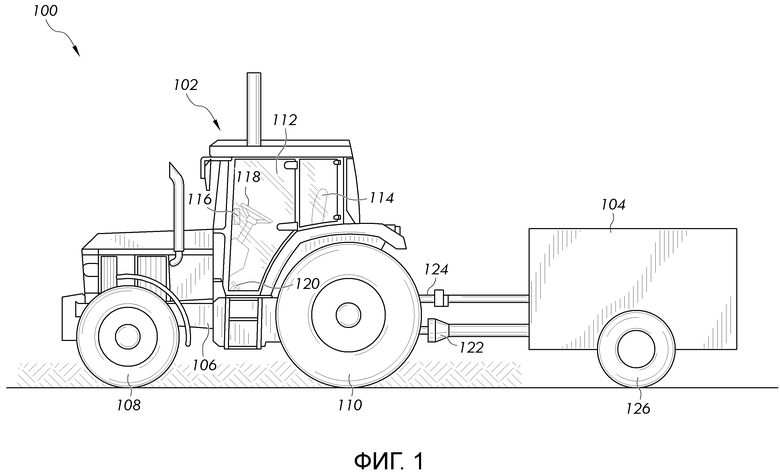
1. Тормозная система прицепа и рабочей машины, содержащая:
источник находящейся под давлением текучей среды;
гидравлический основной клапан, соединенный с источником по текучей среде, при этом гидравлический основной клапан содержит впуск и выпуск;
пневматический основной клапан, соединенный с источником по текучей среде, причем пневматический основной клапан содержит впуск и выпуск;
пропорциональный клапан управления, соединенный с источником по текучей среде, при этом пропорциональный клапан управления содержит выпуск, находящийся в сообщении по текучей среде с впусками гидравлического основного клапана и пневматического основного клапана;
гидравлический выход, выполненный с возможностью соединения по текучей среде с гидравлической тормозной системой прицепа, причем гидравлический выход соединен по текучей среде с выпуском гидравлического основного клапана; и
пневматический выход, выполненный с возможностью соединения по текучей среде с пневматической тормозной системой прицепа, при этом пневматический выход соединен по текучей среде с выпуском пневматического основного клапана.
2. Тормозная система по п. 1, дополнительно содержащая электромагнитный клапан, находящийся в сообщении по текучей среде с пропорциональным клапаном управления, при этом электромагнитный клапан выполнен с возможностью перемещения между открытым положением, в котором пропорциональный клапан управления соединен по текучей среде с гидравлическим основным клапаном и пневматическим основным клапаном, и закрытым положением, в котором пропорциональный клапан управления не соединен по текучей среде с гидравлическим основным клапаном и пневматическим основным клапаном.
3. Тормозная система по п. 1, дополнительно содержащая:
контроллер; и
электромагнит электромагнитного клапана, находящийся в электрическом сообщении с контроллером, при этом перемещение электромагнитного клапана между открытым и закрытым положениями функционально регулируется контроллером.
4. Тормозная система по п. 1, дополнительно содержащая:
контроллер;
рабочий тормозной клапан, выполненный с возможностью обеспечения текучей среды при приведении в действие рабочего тормоза рабочей машины;
датчик, находящийся в электрическом сообщении с контроллером, при этом датчик выполнен с возможностью определения тормозного давления из рабочего тормозного клапана;
при этом контроллер определяет команду торможения в зависимости от тормозного давления, и на основании команды торможения функционально регулирует пропорциональный клапан управления.
5. Тормозная система по п. 4, в которой контроллер получает команду предварительного торможения и функционально регулирует выход пропорционального клапана управления в зависимости от тормозного давления и команды предварительного торможения.
6. Тормозная система по п. 4, дополнительно содержащая челночный клапан, выполненный с возможностью перемещения между первым положением и вторым положением, при этом челночный клапан соединен по текучей среде между пропорциональным клапаном управления и рабочим тормозным клапаном;
при этом челночный клапан находится в первом положении, когда тормозное давление из рабочего тормозного клапана больше, чем выходное давление из пропорционального клапана управления, а во втором положении, когда тормозное давление из рабочего тормозного клапана меньше, чем выходное давление из пропорционального клапана управления.
7. Тормозная система по п. 6, в которой:
в первом положении рабочий тормозной клапан непосредственно соединен по текучей среде с гидравлическим и пневматическим основными клапанами, а челночный клапан блокирует соединение с прохождением текучей среды между пропорциональным клапаном управления и гидравлическим и пневматическим основными клапанами; а
во втором положении, пропорциональный клапан управления непосредственно соединен по текучей среде с гидравлическим и пневматическим основными клапанами, а челночный клапан блокирует соединение с прохождением текучей среды между рабочим тормозным клапаном и гидравлическим и пневматическим основными клапанами.
8. Способ управления находящейся под давлением текучей средой в тормозную систему прицепа, включающий:
обеспечение контроллера, источника гидравлической жидкости, источника рабочего газа пневмосистемы, тормозной системы рабочей машины, гидравлического тормозного выхода, пневматического тормозного выхода, гидравлического основного клапана, соединенного по текучей среде с гидравлическим тормозным выходом, пневматического основного клапана, соединенного по текучей среде с пневматическим тормозным выходом, пропорционального клапана управления, соединенного по текучей среде с источником гидравлической жидкости, электромагнитного клапана и челночного клапана;
определение датчиком тормозного давления в тормозной системе рабочей машины;
передачу тормозного давления в контроллер посредством датчика;
идентификацию контроллером команды предварительного торможения для пропорционального клапана управления;
определение контроллером команды торможения в зависимости от тормозного давления и команды предварительного торможения;
регулирование контроллером выходного давления пропорционального клапана управления в зависимости от команды торможения; и
выведение давления управления в гидравлический основной клапан и пневматический основной клапан на основании большего из выходного давления пропорционального клапана управления и тормозного давления тормозной системы рабочей машины.
9. Способ по п. 8, дополнительно включающий:
обеспечение первого тормоза и второго тормоза тормозной системы рабочей машины, при этом первый тормоз генерирует первое тормозное давление, а второй тормоз генерирует второе тормозное давление;
соединение по текучей среде первого датчика с первым тормозом для определения первого тормозного давления и второго датчика со вторым тормозом для определения второго тормозного давления, при этом первый датчик и второй датчик электрически соединены с контроллером;
при этом этап определения включает вычисление команды торможения в зависимости от первого тормозного давления, второго тормозного давления и команды предварительного торможения.
10. Способ по п. 9, в котором этап определения включает умножение команды предварительного торможения на среднее из первого и второго тормозных давлений.
11. Способ по п. 9, в котором этап определения включает умножение команды предварительного торможения либо на более высокое, либо на более низкое из первого и второго тормозных давлений.
12. Способ по п. 9, в котором этап регулирования включает:
вычисление команды торможения в зависимости от первого тормозного давления, второго тормозного давления и команды предварительного торможения;
сравнение команды торможения с командой предварительного торможения; и
вывод тока в пропорциональный клапан управления на основании большей из команды торможения и команды предварительного торможения.
13. Способ по п. 8, в котором этап выведения включает приведение челночного клапана в первое положение или во второе положение на основании большего из выходного давления пропорционального клапана управления и тормозного давления тормозной системы рабочей машины.
14. Способ по п. 8, в котором этап регулирования включает:
определение величины тока, пропорциональной определенному тормозному давлению; и
отправку величины тока контроллером в пропорциональный клапан управления;
при этом величина тока регулируется на основании команды предварительного торможения.
15. Способ по п. 8, дополнительно включающий управляемое регулирование команды предварительного торможения для пропорционального клапана управления.
16. Способ по п. 8, дополнительно включающий:
соединение по текучей среде электромагнитного клапана между пропорциональным клапаном управления и челночным клапаном;
электрическое соединение электромагнита электромагнитного клапана с контроллером; и
функциональное регулирование перемещения электромагнитного клапана между открытым положением и закрытым положением, при этом в открытом положении выходное давление пропорционального клапана управления гидравлически или пневматически соединено с челночным клапаном, а в закрытом положении выходное давление пропорционального клапана управления не соединено гидравлически или пневматически с челночным клапаном.
17. Способ по п. 16, в котором в закрытом положении рабочий тормозной клапан непосредственно соединен по текучей среде с гидравлическим основным клапаном и пневматическим основным клапаном.
18. Тормозная система комбинации трактора с прицепом, содержащая:
контроллер;
источник находящейся под давлением текучей среды;
первый тормоз и второй тормоз трактора, причем первый тормоз обеспечивает первое тормозное давление, а второй тормоз обеспечивает второе тормозное давление;
первый челночный клапан, находящийся в сообщении по текучей среде с первым тормозным давлением и вторым тормозным давлением;
гидравлический основной клапан, соединенный с источником по текучей среде, при этом гидравлический основной клапан содержит впуск и выпуск, причем впуск соединен по текучей среде с первым челночным клапаном;
пневматический основной клапан, соединенный с источником по текучей среде, при этом пневматический основной клапан содержит впуск и выпуск, причем впуск пневматического основного клапана соединен по текучей среде с впуском гидравлического основного клапана;
пропорциональный клапан управления, соединенный с источником по текучей среде;
второй челночный клапан, соединенный по текучей среде между пропорциональным клапаном управления и первым челночным клапаном;
гидравлический выход, соединенный по текучей среде с выпуском гидравлического основного клапана и выполненный с возможностью соединения по текучей среде с гидравлической тормозной системой прицепа; и
пневматический выход, соединенный по текучей среде с выпуском пневматического основного клапана и выполненный с возможностью соединения по текучей среде с пневматической тормозной системой прицепа;
при этом контроллер функционально регулирует выходное давление пропорционального клапана управления в зависимости от регулируемой команды торможения;
при этом давление управления передается по текучей среде в гидравлический основной клапан и пневматический основной клапан, при этом давление управления представляет собой функцию первого тормозного давления, второго тормозного давления и выходного давления.
19. Тормозная система по п. 18, дополнительно содержащая электромагнитный клапан, находящийся в сообщении по текучей среде между пропорциональным клапаном управления и вторым челночным клапаном, при этом электромагнитный клапан выполнен с возможностью перемещения между открытым положением, в котором пропорциональный клапан управления соединен по текучей среде со вторым челночным клапаном, и закрытым положением, в котором пропорциональный клапан управления не соединен по текучей среде со вторым челночным клапаном.
20. Тормозная система по п. 19, дополнительно содержащая дисплей оператора для передачи команды предварительного торможения в контроллер;
при этом команда торможения определяется контроллером в зависимости от команды предварительного торможения, первого тормозного давления и второго тормозного давления;
при этом выходное давление пропорционального клапана управления представляет собой функцию тока, обеспеченного контроллером в пропорциональный клапан управления в зависимости от команды торможения.
| Тормозная система трактора | 1983 |
|
SU1191339A1 |
| ПИТАТЕЛЬ КОМКУЮЩИХСЯ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1999 |
|
RU2165901C1 |
| US 7517026 B1, 14.04.2009. | |||

