Изобретение относится к медицинской технике, в частности к приспособлениям, помогающим ходьбе в заранее предопределенных режимах движения экзоскелета пользователей с нарушением функций опорно-двигательного аппарата.
Известны способы повышения комфортности ходьбы пользователя (US 2013/0199586 А1 и ЕР 0541935 А2) путем изменения длины костылей или трости, приводимых в движение пользователем.
Недостатком упомянутых способов, принятых за аналоги, является то, что перед началом ходьбы приспособления необходимо настраивать под конкретного пациента вручную, что трудоемко и не всегда выполнимо с требуемой точностью.
Наиболее близким к предложенному способу, принятым за прототип, можно считать способ, описанный в п. 4-6 патента US 20070123997 А1, где длина голени и бедра экзоскелета регулируется вручную под конкретного пользователя.
Недостатком указанного способа является относительно высокая трудоемкость настройки экзоскелета под антропометрические параметры пользователя, обусловленная необходимостью проведения измерений и ручных регулировок, при этом уровень квалификации помощника-ассистента пользователя определяет качество проводимых регулировок.
Техническим результатом, достигаемым изобретением, является автоматизация процесса адаптации экзоскелета к антропометрическим параметрам пользователя и снижение требований к уровню квалификации помощника-ассистента.
Указанный технический результат достигается реализацией способа, осуществляемого автоматически, путем изменения длины голени и бедра экзоскелета при помощи исполнительных механизмов по предварительно установленным на осях сгибания голени и бедра пользователя маркерам, причем изменение длины голени и бедра экзоскелета происходит до совмещения осей сгибания экзоскелета с осями сгибания пользователя.
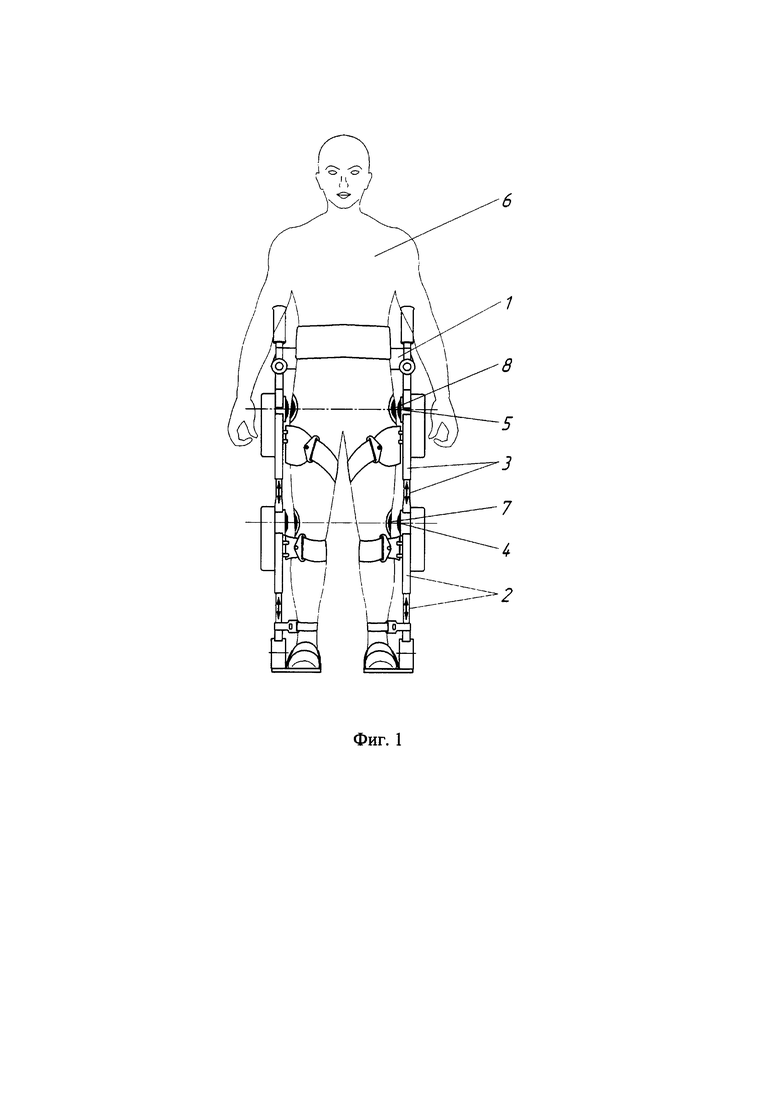
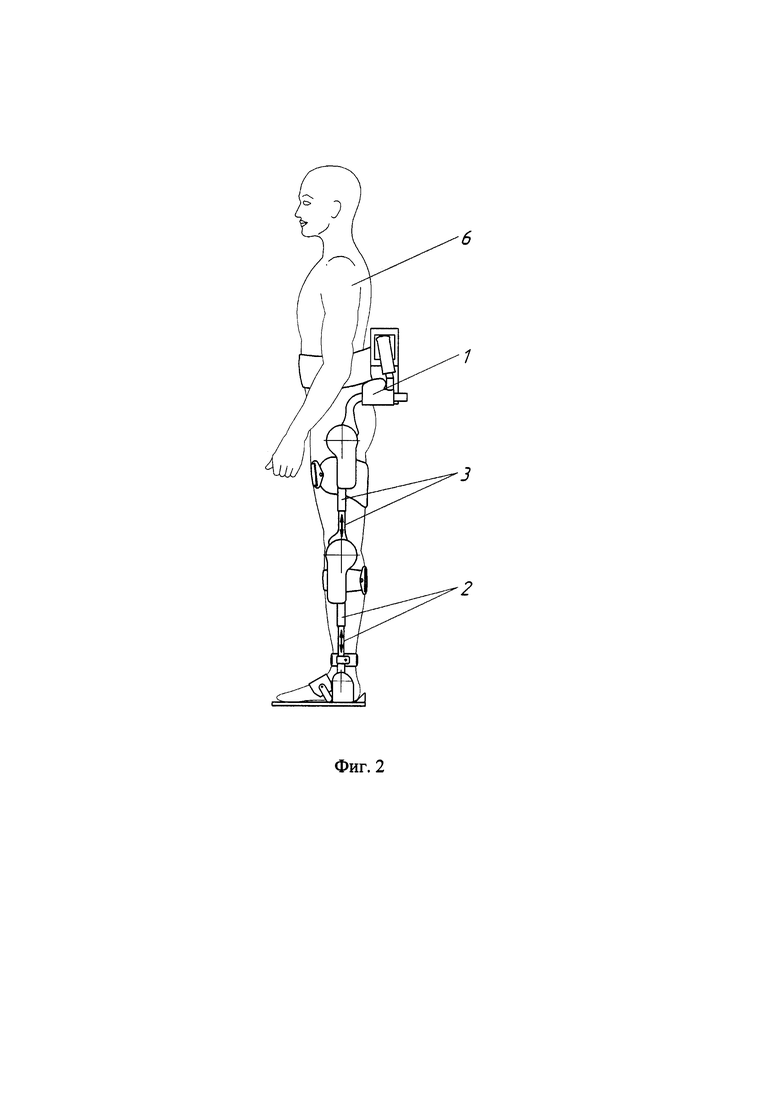
На фиг.1 показан экзоскелет с пользователем, вид спереди, а на фиг.2 - экзоскелет с пользователем, вид сбоку.
Реализация способа адаптации экзоскелета к антропометрическим параметрам пользователя осуществляется следующим образом, Экзоскелет 1 содержащий голень 2 и бедро 3 изменяемой длины посредством, например, встроенных исполнительных механизмов линейного перемещения, выполненных в виде электроприводов с передачей «винт-гайка». На осях сгибания коленного и бедренного суставов экзоскелета 1 установлены датчики Холла 4 и 5, выдающие максимум напряжения при максимальном сближении их с магнитными маркерами 7 и 8.
А на осях сгибания голени и бедра пользователя 6 установлены маркеры 7 и 8 соответственно, и представляющие собой, например, постоянные магниты, зафиксированные на пользователе хомутиками.
Перед надеванием экзоскелета 1 на пользователя 6 на осях сгибания голени и бедра прикрепляются маркеры 7 и 8. После того, как на пользователя 6 будет надет экзоскелет 1, включается система, определяющая рассогласование положения датчиков 4 и 5 от положения маркеров 7 и 8, после чего модули бедра 3 и голени 2 автоматически изменяют свою длину до совмещения осей сгибания экзоскелета с осями сгибания пользователя. После чего, экзоскелет с пользователем начинает реализовывать свои реабилитационные функции.
Указанный способ позволяет автоматизировать процесс адаптации экзоскелета к антропометрическим параметрам пользователя и обеспечить высокую точность совмещения осей коленного и бедренного суставов пользователя и соответствующих осей суставов экзоскелета. Это позволит повысить комфортность взаимодействия пользователя с экзоскелетом
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДЛЯ УПРАВЛЕНИЯ ИСКУССТВЕННЫМ КОЛЕННЫМ СУСТАВОМ | 2020 |
|
RU2814943C2 |
| СПОСОБ УПРАВЛЕНИЯ ИЗМЕНЕНИЕМ АМОРТИЗАЦИИ У ИСКУССТВЕННОГО СУСТАВА | 2016 |
|
RU2722448C2 |
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| ЗАЩИТНЫЙ ЧЕХОЛ НОЖНОЙ ОПОРЫ ЭКЗОСКЕЛЕТА | 2016 |
|
RU2639814C1 |
| СПОСОБ УПРАВЛЕНИЯ ЭКЗОСКЕЛЕТОМ | 2018 |
|
RU2698364C1 |
| Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей | 2021 |
|
RU2807146C2 |
| Экзоскелет | 2023 |
|
RU2833109C1 |
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| СПОСОБ УПРАВЛЕНИЯ АМОРТИЗАЦИЕЙ ФАЗЫ ОСТАНОВКИ ИСКУССТВЕННОГО КОЛЕННОГО СУСТАВА | 2016 |
|
RU2715683C2 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2017 |
|
RU2659132C1 |
Изобретение относится к медицине, а именно к способам адаптации экзоскелета к антропометрическим параметрам пользователя. Способ осуществляется путем изменения длины голени и бедра экзоскелета. Адаптация производится автоматически путем изменения длины голени и бедра экзоскелета при помощи исполнительных механизмов по предварительно установленным на осях сгибания голени и бедра пользователя маркерам. Изменение длины голени и бедра экзоскелета происходит до совмещения осей сгибания экзоскелета с осями сгибания пользователя. Достигается автоматизация процесса адаптации экзоскелета к антропометрическим параметрам пользователя. 2 ил.
Способ адаптации экзоскелета к антропометрическим параметрам пользователя путем изменения длины голени и бедра экзоскелета, отличающийся тем, что адаптация производится автоматически, путем изменения длины голени и бедра экзоскелета при помощи исполнительных механизмов по предварительно установленным на осях сгибания голени и бедра пользователя маркерам, причем изменение длины голени и бедра экзоскелета происходит до совмещения осей сгибания экзоскелета с осями сгибания пользователя.
| US 20070123997 A1, 31.05.2007 | |||
| ГРУЗОВОЙ ЭКЗОСКЕЛЕТ С НАСТРОЙКОЙ ПОД АНТРОПОМЕТРИЧЕСКИЕ ПАРАМЕТРЫ ПОЛЬЗОВАТЕЛЯ | 2017 |
|
RU2665116C1 |
| 0 |
|
SU171262A1 | |
| CN 108294912 A, 20.07.2018 | |||
| CN 106272337 A, 04.01.2017. | |||

