Изобретение относится к медицине, а именно к восстановительной медицине - способу повышения двигательных функций при ходьбе в ортопедическом аппарате на нижнюю конечность больных с последствиями детского церебрального паралича, инсульта, при заболевании спина Бифида, при спинно-мозговой грыже, последствиях травм поясничного отдела позвоночника с неполным повреждением спинного мозга, спиналыюй атрофии Верднига-Гофмана и Дубровина, синдроме Луи-Бара, некоторых формах атаксий, миопатии, состояниях после восстановигельных операций на нижних конечностях, при рассеянном склерозе, черепно-мозговых травмах, послеоперационных повреждениях головного мозга, токсической энцефалопатии, миоплазии, специальных дисплазиях, полиневропатии, миелитах различной этиологии, полиомиелите, амиотрафиях и некоторых других заболеваниях, поражениях опорно-двигательной системы. При этом возникают различные по степени проявления: спастические, вялые парезы, параличи. Одновременно нарушается опороспособпость больного, снижается возможность передвижения. В нижних конечностях появляются патологические установки, контрактуры, нарушается тонус мышц, возникает тутоподвижность, нарушается вся схема построения конечности свойственная норме. Эти проявления возникают также и как вторичные деформации при отсутствии должного воздействия и не проведении комплексных способов реабилитации, из которых одним из важнейших является ортезирование с использованием ортопедических аппаратов.
Одновременно, наряду с медицинскими показателями нарушается целый ряд биомеханических характеристик нижних конечностей при осуществлении локомоций, в первую очередь в сагиттальной плоскости. Происходят изменения:
- масс-инерционных характеристик нижних конечностей из-за изменений масс сегментов, перемещения центров масс и изменений положения суставов в процессе ходьбы, что нарушает частоту собственных маятникообразных движений, участвующих в функционировании нижней конечности. Масс-инерционные характеристики нарушаются и за счет масс звеньев ортопедического аппарата, установленных на нижней конечности расположения их центров масс, что влияет на общий центр масс образующейся биотехнической системы «ортопедический аппарат-нижняя конечность», изменение частоты колебаний вызывает нарушение произвольного, наименее энергоемкого темпа ходьбы, из-за чего снижаются двигательные функции нарушается рисунок ходьбы;
- упругих характеристик связочно-мышечного аппарата в сегментах, суставах конечностей, ведущих к отсутствию рекуперации энергии, резкому снижению двигательных функции нижней конечности для обеспечения ходьбы, нарушению произвольного наименее энергоемкого темпа ходьбы, при котором минимальна электрическая активность мышц;
- амплитуд движений в суставах, что ведет к «разболтанности» одних и недостаточности объемов движений в других и, в итоге, к снижению двигательных функций;
- взаиморасположения осей суставов в проекции на сагиттальную плоскость во время стояния и ходьбы, что ведет к излишним энерготратам и снижает двигательные функции, например, при рекурвации или сгибательной контрактуре в коленном суставе, взаиморасположение сегментов влияет и на масс-инерционные и на упругие характеристики;
- величин, синхронности моментов сил относительно плюснефаланговых, голеностопного, коленного, тазобедренного суставов, при снижении которых резко снижаются двигательные функции конечности, происходит разбалансировка движений конечности.
Таким образом, патологические проявления в нижней конечности, нарушающие ее характеристики, свойственные норме, значительно снижают двигательные функции больного, и требуется их увеличение.
Известен способ повышения двигательных функций при ходьбе больного, заключающийся в изготовлении в соответствии с медицинскими показаниями назначаемого больному ортопедического аппарата на нижнюю конечность (ОАНК), состоящего из звена крепления на туловище, звена бедра, соединенного со звеном бедра тазобедренным шарнирным узлом, звена голени соединенного со звеном бедра коленными шарнирными узлами, голеностопных шарнирных узлов соединенных верхней частью со звеном голени, а нижней со звеном стопы, имеющей жесткую подошвенную пластину, снабжение ОАНК электростимулятором с источником питания и накожными электродами, установленными в области коленного сустава больного [1].
Известный способ обеспечивает увеличение момента сил относительно коленного сустава, чем обеспечивается некоторое увеличение двигательных функций нижней конечности при ходьбе.
Однако в результате электростимуляции возникают только внутренние моменты сил, в то время как создание внешних моментов сил относительно шарнирных узлов в данном способе не предусмотрено, причем электростимуляция противопоказана при целом ряде сопутствующих заболеваний. Не учитывается влияние изменений в пораженной конечности, а также изменений за счет звеньев ОАНК масс-инерционных характеристик, нарушенных в пораженной конечности упругих связей на двигательные функции. В ОАНК они отсутствуют. Схема построения в соответствии с известным способом зависит только от состояния мышц и только в области коленного сустава и не учитывает влияние биомеханических, конструктивных характеристик, воздействия внешних моментов сил, возникающих в биотехнической системе (БТС) «ОАНК-нижняя конечность» при взаимосвязи звеньев ОАНК и сегментов конечности, что противоречит общему подходу и приводит к неправильной трактовке схемы построения. Плюснефаланговые и межфаланговые суставы обездвижены и не вовлечены в процесс ходьбы в ОАНК, что еще больше искажает схему построения ОАНК, увеличивает энерготраты и снижает двигательные функции.
Известен способ повышения двигательных функций при ходьбе, заключающийся в изготовлении в соответствии с медицинскими показаниями назначаемого больному ОАНК, содержащего звено его крепления на туловище, звено бедра, соединенные тазобедренным шарнирным узлом с осью, звено голени соединенное со звеном бедра коленными шарнирными узлами с осью, голеностопные шарнирные узлы с осью, соединенные верхней частью с гильзами голени, а нижней со звеном стопы имеющим жесткую подошвенную пластину, включающую плюснефаланговый и межфаланговый участки, электростимулятор с источником питания и накожными электродами, установленными в области одного из суставов, а также электроприводов шарнирных узлов с осями с системой управления и внешнего источника энергии [2]. Известным способом достигается повышение двигательных функций за счет воздействия на внутренний момент сил относительно одного из суставов нижней конечности больного и за счет воздействия на моменты внешних сил БТС относительно шарнирных узлов с осями.
Недостатками данного способа является отсутствие определения и регулировки расположения центров масс сегмента бедра и сегмента голени со стопой с надетым на них ОАНК и приведение их к такому положению, которое обеспечивает оптимизацию периода свободных колебаний, совпадающего с длительностью локомоторного цикла шага при произвольном темпе ходьбы, когда электрическая активность мышц минимальна, что минимизирует энерготраты при ходьбе и повышение двигательных функций требует меньших затрат. Еще одним недостатком известного способа является отсутствие обеспечения двигательных функций за счет рекуперации энергии, возникающей в тазобедренном, коленном и голеностопном шарнирных узлах под действием упругих связей и обеспечивающей возникновение упругих составляющих суммарных моментов сил в суставах при ходьбе в норме. Отсутствие такого воздействия в ОАНК предопределяет увеличение мощности, габаритов приводов, аккумуляторов и вытекающие из этого повышенные массы и энерготраты. Кроме того, увеличенные габариты и повышенная масса отрицательно влияют на удобство эксплуатации ОАНК. В известном способе также отсутствует оптимизирующая регулировка расположения осей шарнирных узлов в проекции на сагиттальную плоскость в зависимости от возникающих относительно осей шарнирных соединений моментов сил. Используя жесткую подошвенную площадку в звене стопы, известный способ не предусматривает движений в плюснефаланговых и межпальцевых суставах стопы и вовлечение их в процесс движения, что значительно повышает энерготраты, снижает двигательные функции нижней конечности при ходьбе. Отсутствие движений в плюснефалаговых и межфаланговых суставах стопы нижней конечности приводит к отсутствию момента сил в дистальных сочленениях стопы во все фазы шага периода опоры, в том числе в фазу заднего толчка, когда обеспечение момента сил за счет рекуперации энергии в стопе играет важнейшую роль в обеспечении двигательных функций. Кроме того, отсутствие движений ведет к необходимости восполнения их роли за счет активизации других звеньев, сегментов нижней конечности, необходимости дополнительной мощности приводов и емкости внешнего источника энергии, влекущих повышение их массы и габаритов. Необеспечение движений в плюснефаланговых и межфаланговых суставах стопы ведет к патологическим изменениям костно-связочно-мышечного аппарата, атрофии мышц стопы, резкому нарушению рисунка ходьбы, всех биомеханических характеристик ходьбы. Недостатком также является то, что известный способ не предусматривает обеспечение перемещения вращения звена голени относительно звена бедра по траектории циклоиды, как это осуществляется в коленном суставе нижней конечности, а также не совпадение расположения осей тазобедренного, голеностопного и плюснефалангового шарнирных узлов с осями соответствующих суставов в проекции на сагиттальную плоскость. Вследствие этого не возникает укорочение длины ОАНК в фазу переноса, что вызывает задевание передней частью жесткой подошвенной пластины за опорную поверхность. Для устранения этого возникает необходимость излишнего поднятия на другой ноге в фазу ее опоры, что ведет к резкому возрастанию энерготрат больного, перегрузке второй конечности, неестественному рисунку ходьбы. Несоответствие расположения осей также способствует возникновению поршневых движений между сегментами конечности и звеньями ОАНК.
Технической задачей предлагаемого изобретения является повышение двигательных функций при ходьбе больного в ортопедическом аппарате нижней конечности (ОАНК) с последствиями спастических, вялых параличей, парезов нижних конечностей, сопровождающихся патологическими установками, контрактурами в суставах, снижением двигательных функций, оптимизации биомеханических характеристик в возникающей биотехнической системе (БТС) «ОАНК-нижняя конечность», таких, как масс-инерционные характеристики звеньев, составляющих моментов внешних сил за счет рекуперации энергии упругими элементами в тазобедренном, коленном и голеностопном шарнирных узлах и плюснефаланговом и межфаланговом участках звена стопы, исключение обездвиживания в плюс нефаланговых и межфаланговых суставах стопы, соблюдение соосности коленного шарнирного узла и коленного сустава, исключение поршневых движений конечности в ОАНК, оптимизации схемы построения, способствующей повышению двигательных функций и тем самым повышение уровня реабилитации, мобильности, активности в повседневной жизни, снижение инвалидизации, выраженных ограничений жизнедеятельности.
Поставленные технические задачи достигаются за счет того, что предварительно (вначале) изготавливают гипсовые негативы, а по ним гипсовые позитивы сегментов бедра и голени со стопой нижней конечности больного, определяют в проекции на сагиттальную плоскость их центры масс, изготавливают ОАНК с электростимулятором и накожными электродами, электроприводами шарнирных узлов, проводят определения центров масс звеньев бедра и голени со стопой ОАНК, совмещают их с центрами масс гипсовых слепков бедра и голени со стопой соответственно, изготавливают имитационное устройство нижней конечности, имеющее регулируемые весовые и дли нотные параметры нижней конечности, тазобедренную, коленную, голеностопную оси, выставляют центры масс звеньев бедра и голени со стопой устройства в соответствии с центрами масс гипсовых позитивов сегментов бедра и голени со стопой больного, проводят определение частоты собственных колебаний звеньев имитационного устройства нижней конечности, регулируют положение звена голени со стопой, определяют частоту собственных колебаний звена голени со стопой, устанавливают изготовленный ОАНК на имитационном устройстве нижней конечности, определяют частоту собственных колебаний звена голени со стопой имитационного устройства нижней конечности со звеном голени со стопой ОАНК, регулируют положение центра масс звена голени со стопой ОАНК, изменяя расположение масс деталей и узлов в звене голени и звене стопы, коленного шарнирного узла, перемещения места установки приводов, приближая частоту собственных колебаний звена голени и бедра БТС к частоте свойственной произвольному темпу ходьбы больного среднестатистического человека с подобными, медицинскими показаниями и антропометрическим и данными, определяют степень патологического поражения мышц нижней конечности и выбирают в зависимости от степени поражения, пропорционально степени поражения жесткости передних и задних тазобедренного, коленного и голеностопного упругих элементов, затем устанавливают на звеньях голени и стопы задний и передний регулируемые голеностопные упоры с задним и передним противоупорами, на звене голени устанавливают задний автоматический регулируемый коленный упор и соединяют его с системой управления, а на звене бедра сзади устанавливают противоупор звена бедра, при этом спереди на звеньях голени и бедра устанавливают консоли, а в верхней части звена бедра сзади размещают задний регулируемый бедренный упор, причем на задней поверхности звена крепления туловища устанавливают задний туловищный упор, при этом на передней поверхности звена бедра устанавливают регулируемый упор, а на звене крепления на туловище имеется передний туловищный противоупор, затем изготавливают упругие элементы и их устанавливают на задний и передний регулируемые голеностопные упоры, на задний автоматический откидной регулируемый коленный упор, на консоли, на задний регулируемый бедренный упор и регулируемый упор в соответствии с определенными ранее жесткостями, выполняют подошвенную пластину из композиционного материала жесткой в пяточном отделе, аркообразной в центральной части и упруго-гибкой в виде пластин в области плюс нефалангового и межфалангового участков, выполняют коленный шарнирный узел с полицентрической, осью вращения в виде циклоиды, начальная мгновенная точка вращения которой отстоит от мгновенной точки вращения при угле сгибания в коленном шарнирном узле 60 градусов, не менее чем на 10 мм, при этом центр оси тазобедренного шарнирного узла совмещают с центром оси тазобедренного сустава, мгновенный центр вращения оси полицентрических коленных шарнирных узлов в выпрямленном до упора положении совмещают с условным центром оси коленного сустава в выпрямленном состоянии, а центры осей голеностопных шарнирных узлов совмещают с центрами оси голеностопного сустава.
Наличие отличительных существенных признаков позволяет сделать вывод о соответствии изобретения критерию патентоспособности «новизна».
Заявленное техническое решение не является очевидным для специалиста, что позволяет сделать вывод о соответствии заявленного изобретения критерию «изобретательский уровень».
Заявленное изобретение может быть выполнено из известных материалов с помощью известных средств, что позволяет сделать вывод о соответствии заявленного изобретения критерию «промышленная применимость».
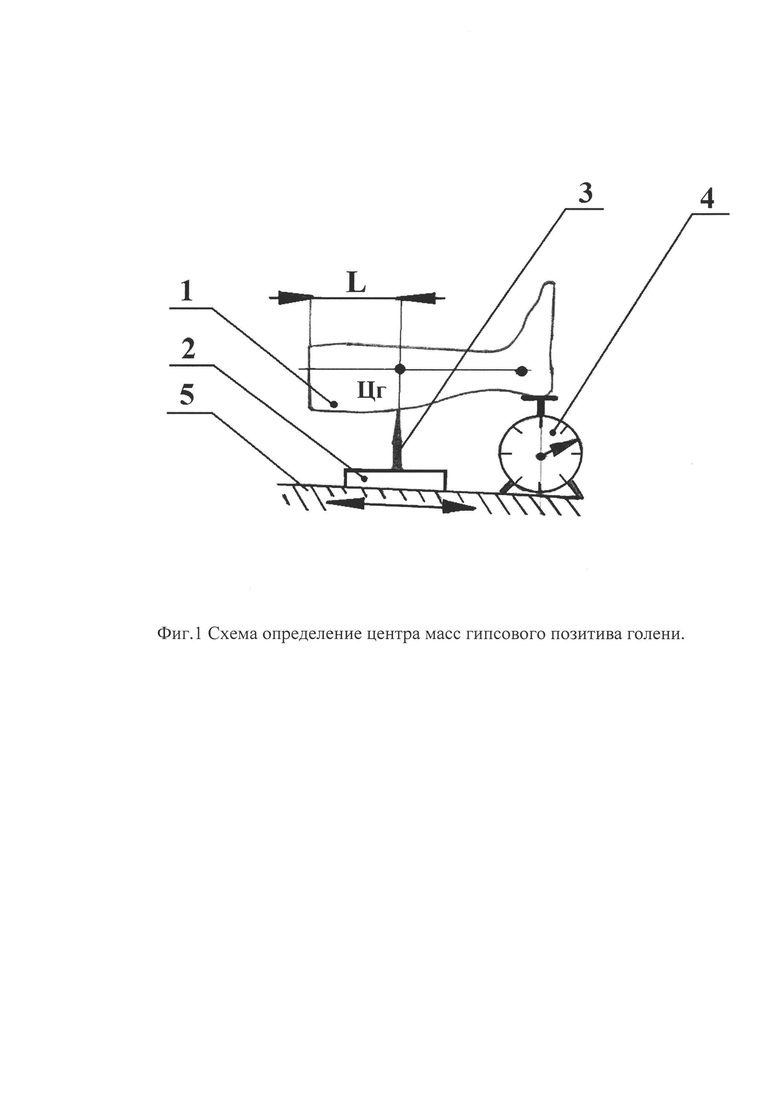
На фиг. 1 представлено схематично определение центра масс гипсового позитива голени со стопой Цг и его расстояния от оси коленного сустава L. На фиг. 1 гипсовый позитив голени поз. 1 лежит одним концом на перемещаемом вдоль слепка основании поз. 2, имеющим упор поз. 3, а другим на весах поз. 4. Весы и основание расположены на столе поз. 5. Для гипсового позитива бедра - аналогично.
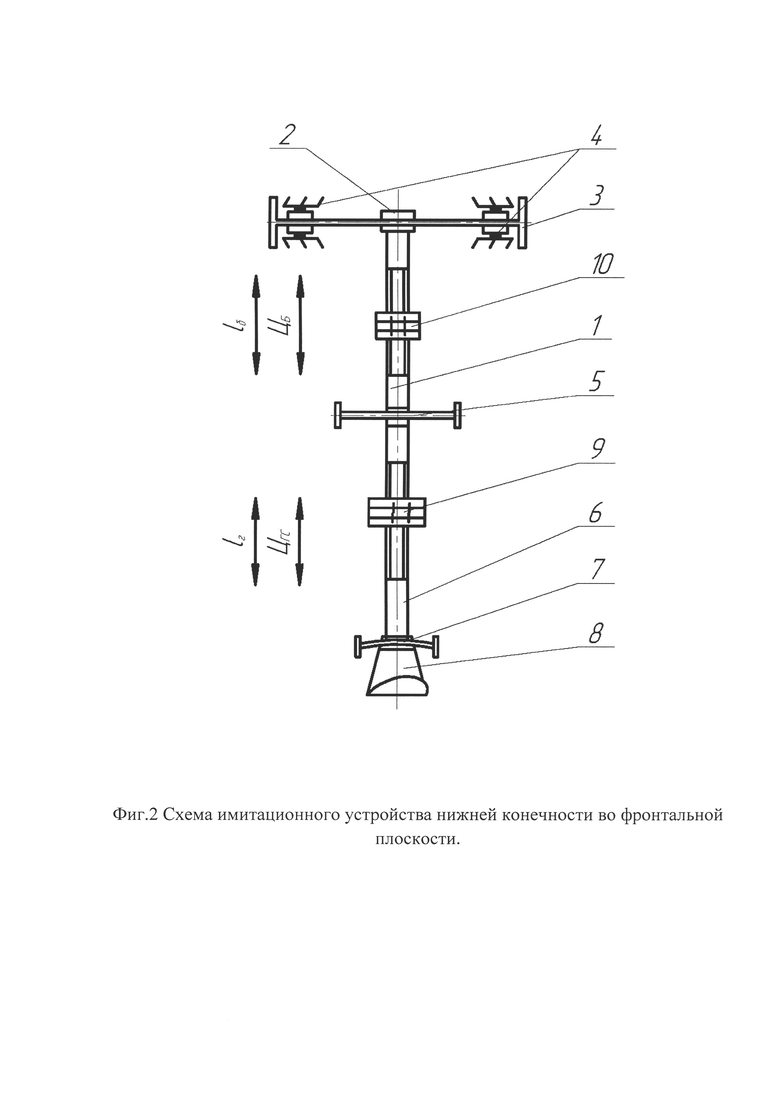
На фиг. 2 представлена схема имитационного устройства нижней конечности во фронтальной плоскости, которая состоит из телескопического имитатора сегмента бедра поз. 6 позволяющего устанавливать различную длину в зависимости от параметров больного, в верхней части которого установлена втулка поз. 7 с длинной тазобедренной осью поз. 8, установленной на концах в опорных втулках поз. 9. В нижней части телескопический имитатор сегмента бедра шарнирно соединен коленной осью поз. 10 с телескопическим имитатором сегмента голени поз. 11. Нижний его конец шарнирно соединен на голеностопной оси поз. 12 с искусственной стопой поз. 13. На телескопических имитаторах сегментов голени и бедра установлены наборы дисковых грузов поз. 14 и поз. 15 с возможностью их смены и перемещения вдоль сегментов с последующей фиксацией.
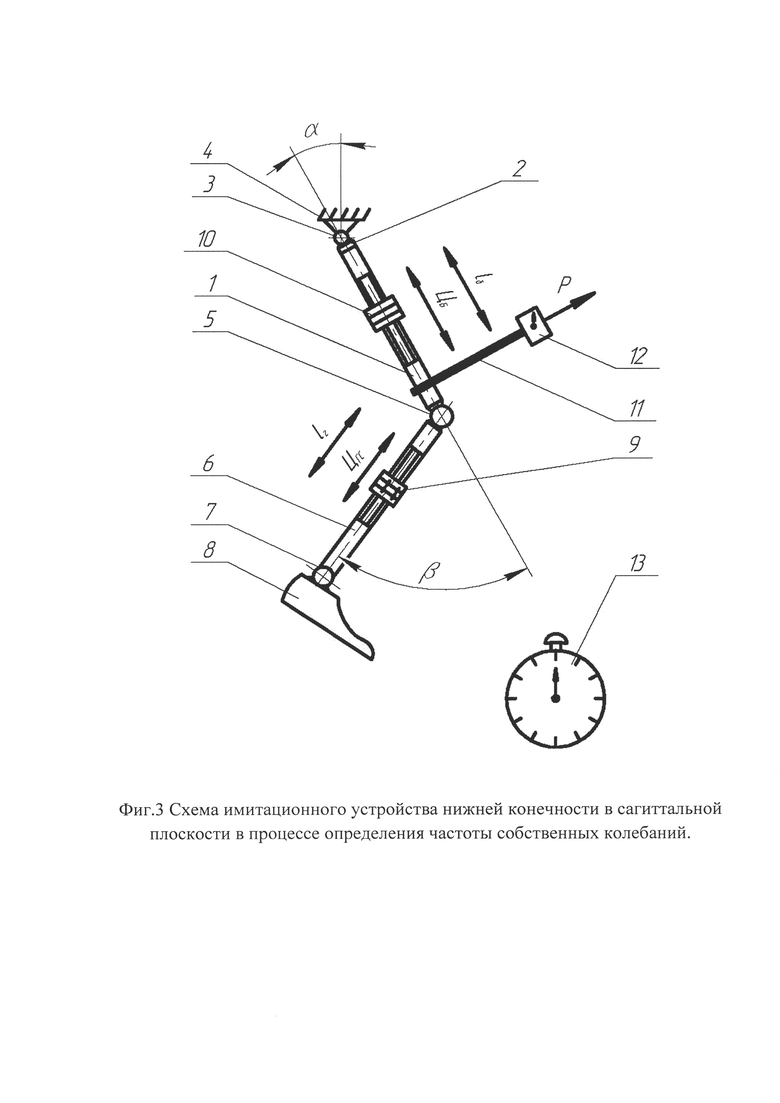
На фиг. 3 представлена схема имитационного устройства нижней конечности во фронтальной плоскости в процессе определения частоты собственных колебаний звеньев голени со стопой. Кроме позиций аналогичных позициям на фигуре 2 добавлена поз. 16 - тяга одним концом соединенная с телескопическим имитатором сегмента бедра, к другому концу которой приложена сила Р через динамометр поз. 17. При этом происходит отклонение телескопического имитатора сегментов бедра относительно вертикали на угол α, а сегмента голени относительно телескопического имитатора сегмента бедра на угол [3. Имитационное устройство нижней конечности дополнено секундомером поз. 18.
На фиг. 4 представлена схема имитационного устройства нижней конечности с установленным ортопедически м аппаратом на нижнюю конечность (ОАНК). Кроме позиций аналогичных позициям на фиг. 2 добавлены позиции, обозначающие гильзу бедра поз. 19, гильзу голени поз. 20, гильзу стопы поз. 21, с креплениями поз. 22. Втулка тазобедренного шарнира ОАНК поз. 23 установлена на данной тазобедренной оси поз. 8 с одной из сторон от втулки поз. 7 в зависимости от ОАНК на правую или левую ногу, а втулки коленных и голеностопных шарниров ОАНК установлены на коленной и голеностопной осях поз. 10 и поз. 12 соответственно.
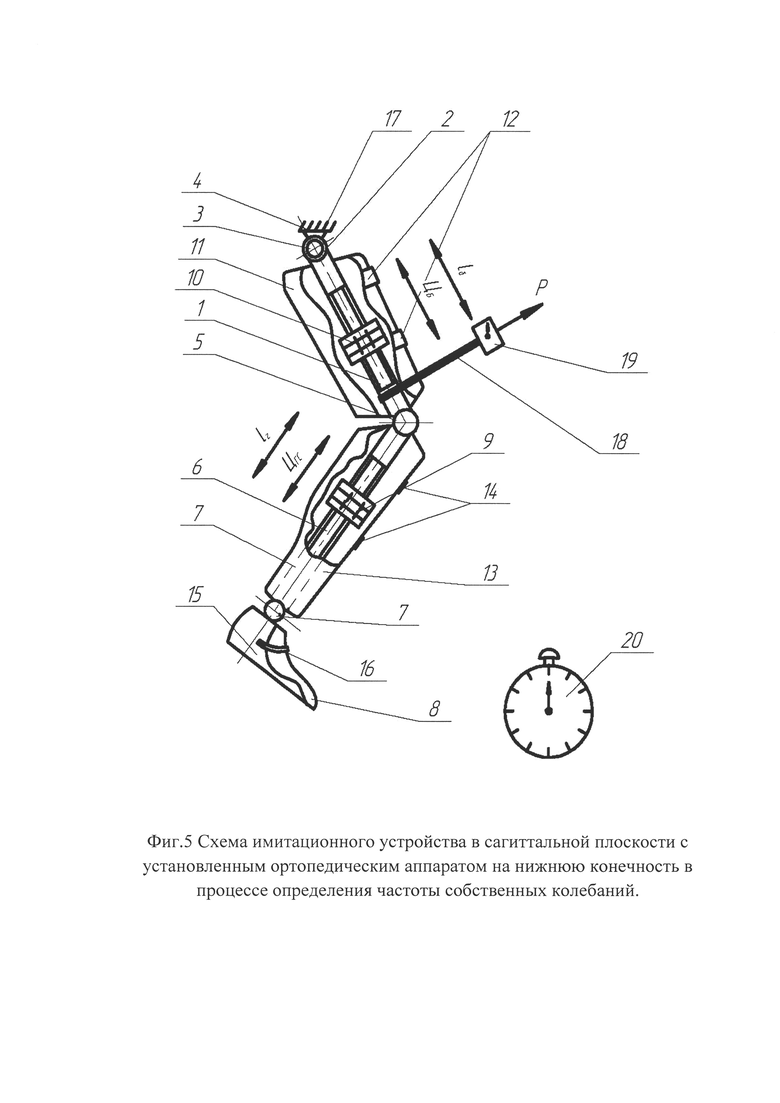
На фиг. 5 представлена схема имитационного устройства нижней конечности в сагиттальной плоскости с установленным ОАНК в процессе определения частоты собственных колебаний с позициями аналогичными позициям на фиг. 4 и добавлением тяги поз. 24 одним концом соединенной с телескопическим имитатором гильзы бедра поз. 6, на другом конце которой расположен динамометр поз. 25 и приложена сила Р, а также используется имеющийся секундомер поз. 18.
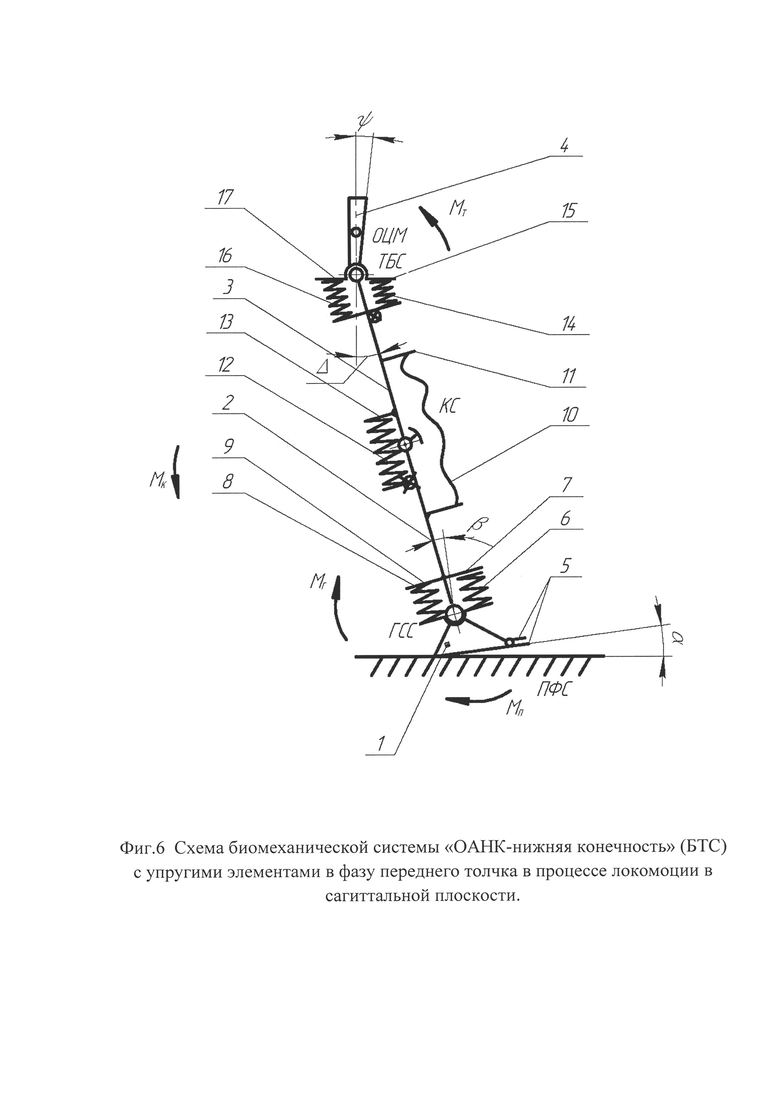
На фиг. 6 представлена схема биомеханической системы «ОАНК-нижняя конечность» (БТС) с упругими элементами в фазу переднего толчка в процессе локомоции в сагиттальной плоскости. БТС состоит из: звена стоны поз. 26, звена голени поз. 27, звена бедра поз. 28, звена туловища с крепления к туловищу поз. 29. На передней части звена стопы установлен упругий элемент типа рессоры поз. 30, снизу звена стопы на его подошвенной поверхности установлен упругий элемент рессорного типа с рессорного типа пластинами в области плюснефалангового сочленения и межфалангового участка поз. 30. На верхнем краю звена стопы спереди снабжен передним регулируемым упором с передним голеностопным упругим элементом поз. 31, а звено голени спереди снабжено передним противоупором поз. 32, сзади звено стопы снабжено задним регулируемым упором с задним голеностопным упругим элементом поз. 33, а звено голени на задней поверхности выполнено с задним противоупором поз. 34.
При этом в серединной части звена голени спереди имеется консоль с передним коленным упругим элементом поз. 35 верхний конец, которого установлен на консоли бедра поз. 36, которая установлена спереди в средней области звена бедра поз. 28.
На задней поверхности звена голени в верхней части установлен автоматический регулируемый коленный упор, соединенный с системой управления имеющий задний коленный упругий элемент поз. 37 контактирующий с задним противоупором звена бедра поз. 38. Спереди в верхней части звена бедра установлен регулируемый тазобедренный упор с передним тазобедренным упругим элементом поз. 39, а звено крепления на туловище спереди снабжено передним туловищным противоупором поз. 40. На задней поверхности звена бедра вверху имеется задний регулируемый бедренный упор с задним тазобедренным упругим элементом поз. 41, а на звене крепления туловища сзади выполнен задний туловищный противоупор поз. 42. В передней части звена стопы имеется плюснефаланговое переходящее в межфаланговое сочленение - ПФС. Звено стопы соединено со звеном голени посредством голеностопного сочленения - ГСС, а звено голени соединено со звеном бедра за счет коленного сочленения - КС. Звено бедра соединено со звеном туловища имеющего крепление к туловищу посредством тазобедренного сочленения - ТБС. БТС функционирует за счет действия моментов сил в плюснефаланговом сочленении - Мп, голеностопном сочленении - Мг, коленном сочленении - Мк и тазобедренном сочленении - Мт. При движении в различные фазы шага между опорной поверхностью и подошвенной поверхностью звена стопы образуется угол α, между звеном стопы и звеном голени - угол β, между звеном голени и звеном бедра - угол γ (в данном положении БТС угол γ=0) между звеном туловища и звеном бедра - угол Δ. Угол отклонения звена туловища от вертикали ψ имеет незначительные значения (амплитуда менее 3°) и поэтому принято условно, что ψ=0. В звене туловища с креплением к туловищу условно показан общий центр масс ОЦМ движущийся в сагиттальной плоскости по синусоиде.
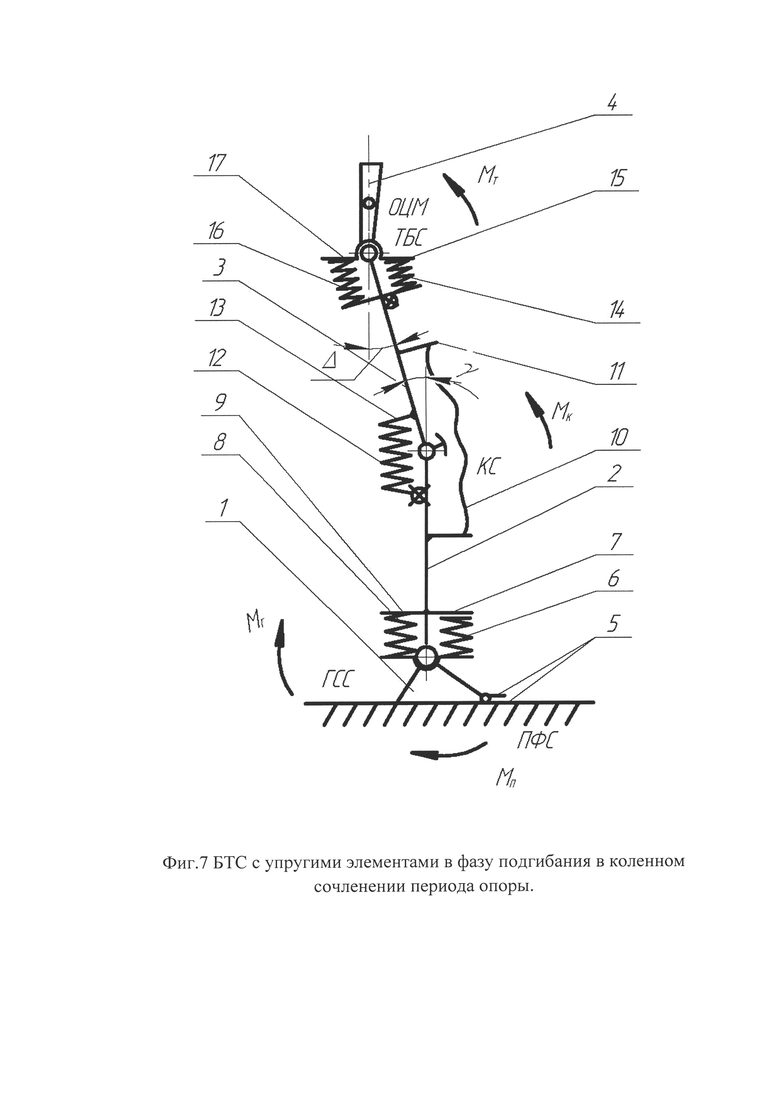
На фиг. 7 представлена БТС с упругими элементами в фазу подгибания в коленном сочленении периода опоры. Обозначения и позиции аналогичны обозначениям и позициям, представленным на фиг. 6.
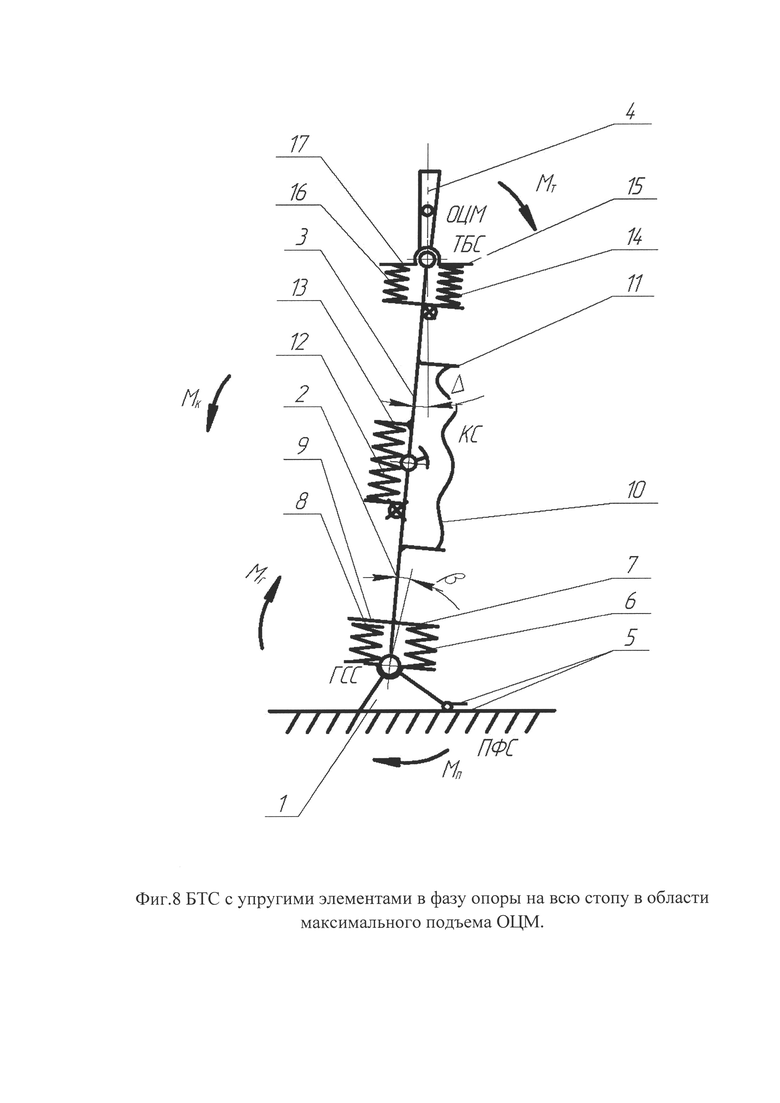
На фиг. 8 представлена БТС с упругими элементами в фазу опоры на всю стону в области максимального подъема ОЦМ. Обозначения и позиции аналогичны обозначениям и позициям, представленным на фиг. 6
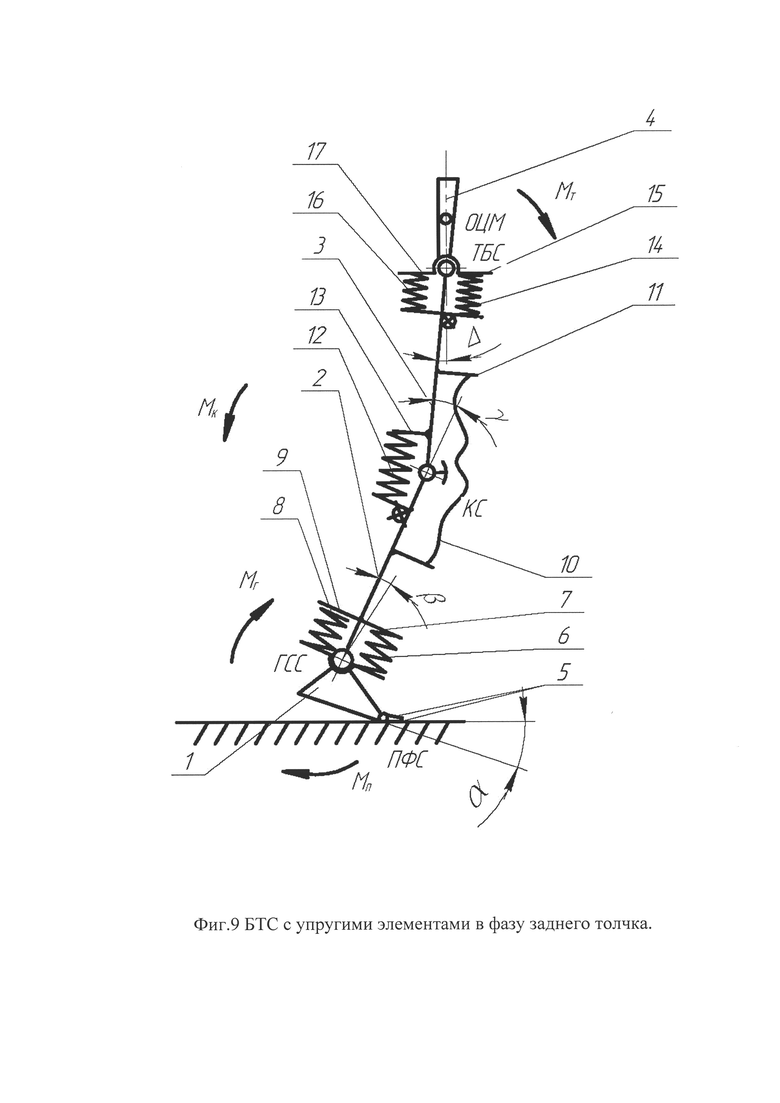
На фиг. 9 представлена БТС с упругими элементами в фазу заднего толчка. Обозначения и позиции аналогичны обозначениям и позициям, представленным на фиг. 6.
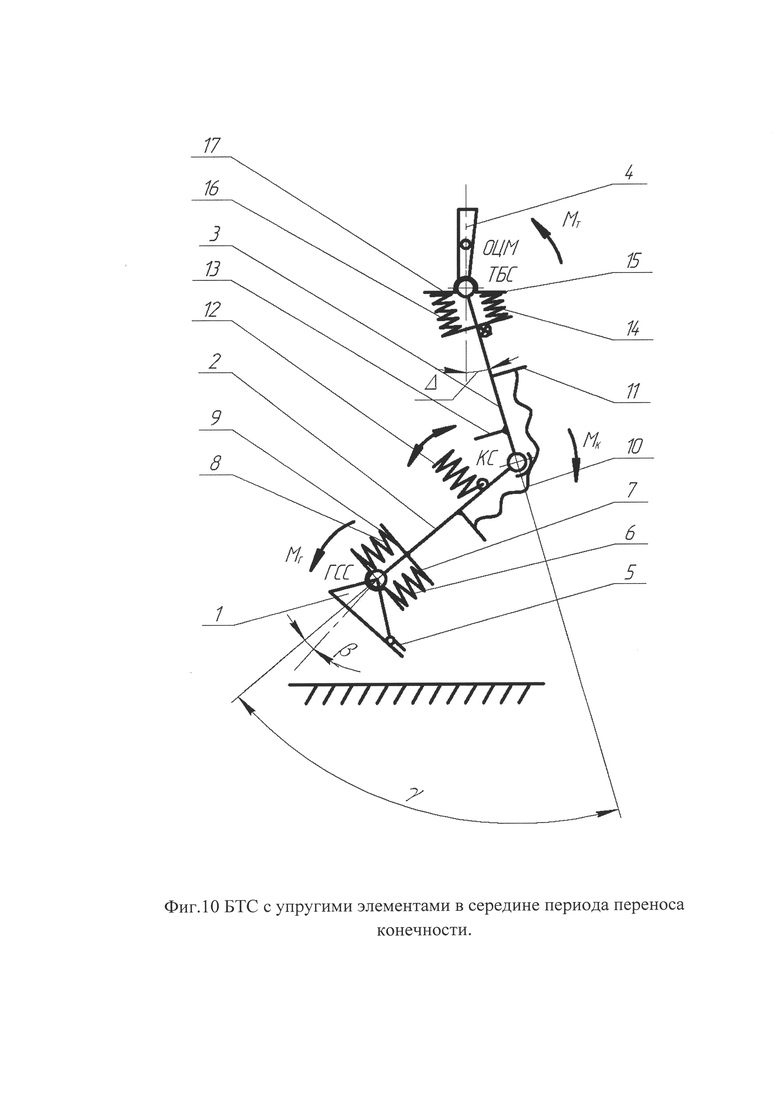
На рисунке 10 представлена БТС с упругими элементами в середине периода переноса конечности. Обозначения и позиции аналогичны обозначениям и позициям, представленным на фиг. 6. здесь автоматический откидной регулируемый коленный упор с упругим элементом представлен в расфиксированном повернутом состоянии для обеспечения угла сгибания в коленном суставе больше, чем на 20°.
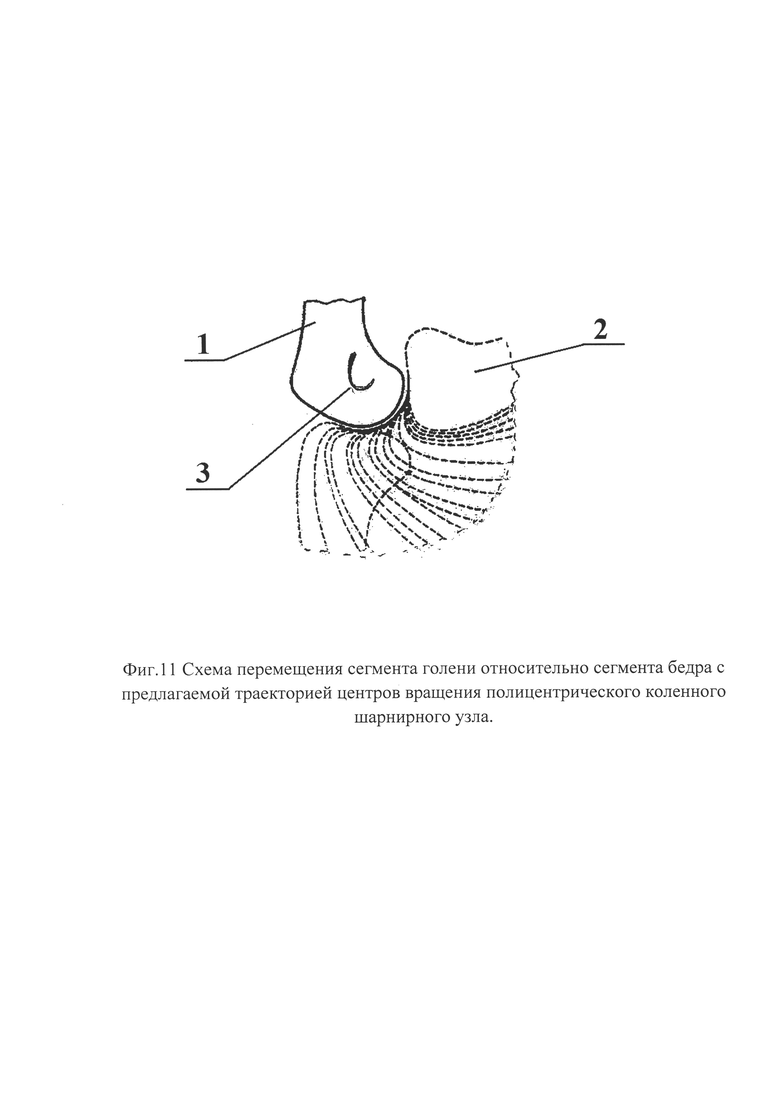
На фиг. 11 представлена схема перемещения сегмента голени относительно сегмента бедра, на которой представлена бедренная кость поз. 43 большеберцовая кость поз. 44 и предлагаемая траектория перемещения центров вращения полицентрического и коленного шарнирного узла поз. 45.
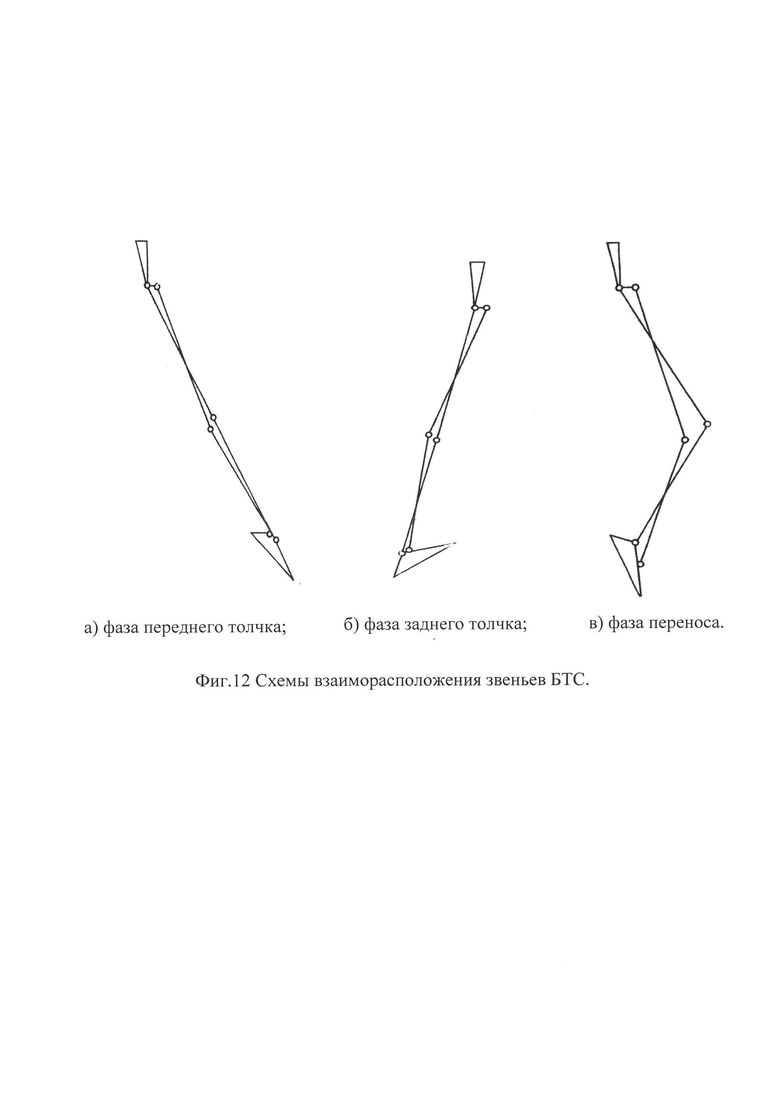
На фиг. 12 представлены схемы взаиморасположения звеньев БТС при несовпадении осей шарнирных узлов ОАНК с осями суставов нижней конечности в различные фазы шага.
а) фаза переднего толчка;
б) фаза заднего толчка;
в) фаза переноса.
На фиг. 13 представлена апробация способа.
Заявленный способ может быть осуществлен следующим образом. После диагностирования и определения показаний к назначению и проведения измерений с сегментов нижней конечности бедра и голени со стопой больного снимают гипсовые негативы, а затем по ним изготавливают гипсовые позитивы бедра и голени со стопой. Затем определяют в соответствии с тем, как это представлено на фиг. 1, центр масс гипсовых позитивов поз. 1. После этого изготавливают ОАНК, устанавливая на нем, учитывая медицинские показания, электростимулятор с накожными электродами, а в шарнирных узлах ОАНК устанавливают в соответствии с медицинскими показаниями приводы с системой управления и снабжают ОАНК внешним источником энергии.
После этого используют имитационное устройство нижней конечности фиг. 2, устанавливая в нем с помощью телескопических звеньев бедра поз. 6 и голени тюз. 11 расстояние между осью тазобедренного шарнирного узла поз. 8 и осью коленного шарнирного узла поз. 10 равной длине гипсового позитива бедра, а расстояние от оси коленного шарнирного узла до нижней конечности звена стопы поз. 13 в соответствии с размером гипсового позитива голени со стопой поз. 1. Затем с помощью подбора и перемещения регулировочных грузов поз. 14 и поз. 15 устанавливают их так, чтобы осуществилось совмещение центров масс звеньев бедра поз. 6 и голени поз. 11 со стопой поз. 13 с центрами масс, измеренных у гипсовых слепков бедра и голени со стопой соответственно. Прикладывая фиг. 3 посредством тяги поз. 16 и динамометра поз. 17 силу Р к звену бедра поз. 6 со скоростью V равной средне статической скорости перемещения сегментов бедра у людей с антропометрическими данными близкими к данным больного, при произвольном темпе ходьбы, когда, как известно, энерготраты минимальны. Это дает в большей мере использовать потенциал ОАНК для увеличения его двигательной функциональности без увеличения мощности приводов, емкости аккумуляторов, ведущей к увеличению их массы, габаритов, без увеличения интенсивности электростимуляции, что отрицательно сказывается на сердечно-сосудистой системе больного.
Сравнивая получаемые величины частоты собственных колебаний со среднестатистическими частотами людей с подобными антропометрическими данными при произвольном темпе ходьбы выявляют рассогласование.
После нахождения получаемой частоты собственных колебаний звена голени поз. 11 со стопой поз. 13 на имитационное устройство нижней конечности устанавливают изготовленный для данного больного О АПК фиг. 4 убирая предварительно из него оси шарнирных узлов совмещая и замещая их осями тазобедренного поз. 8, коленного поз. 10 и голеностопного поз. 12 узлов имитационного устройства нижней конечности. Затем определяют частоту собственных колебаний звена голени поз. 11 со стопой поз. 13 аналогично как это было сделано у звеньев имитационного устройства нижней конечности фиг. 2 без ОАНК. Естественно, что звенья ОАНК вносят рассогласование в ранее полученные характеристики. Поэтому регулируют положение центра масс звена голени поз. 11 со стопой поз. 13 за счет изменения, перемещения массы в звеньях голени поз. 11 и поз. 20 и стопы поз. 13 и поз. 22 изготавливая их, например, из композиционного материала и убирая металлические несущие шины, смещают место установки приводов, проводят повторные измерения частоты собственных колебаний приближая их к частоте свойственной произвольному темпу ходьбы среднестатистического человека с подобными антропометрическими данными с учетом его медицинских показаний.
Перед установкой упругих элементов определяют степень патологического поражения мышц нижней конечности, например, получая электрическую активность мышц нижней конечности в процессе ходьбы с помощью электромиографии. Целесообразно выявлять патологическое состояние мышц как сгибателей, так и разгибателей, обеспечивающих моменты сил относительно тазобедренного, коленного и голеностопного, плюснефалангового суставов. Чем значительней поражение, тем более жестким упругим элементом снабжается то или иное сочленение БТС, восполняя тем самым утраченные функции мышц, попеременно накапливая потенциальную энергию и обеспечивая движение за счет ее перехода в кинетическую в определенные фазы шага.
Упругие элементы устанавливают в БТС определенным образом, располагая их в соответствии с предложенным способом, как это представлено на фиг. 6. Вначале устанавливают задний тазобедренный упругий элемент, соединенный с регулируемым бедренным упором поз. 41, который будет контактировать верхней поверхностью с задним туловищным упором поз. 42, расположенным на корсете (полукорсете) установленном на туловище пациента по медицинским показаниям. Спереди от тазобедренного шарнирного узла в верхней части звена бедра устанавливают передний тазобедренный упругий элемент на регулируемом тазобедренном упоре поз. 39, который автоматически отключается при необходимости осуществления сидения в ортопедическом аппарате, когда угол в тазобедренном суставе равен 80-110 град. Упругие элементы поз. 39 и поз. 41 в различные фазы шага контактируют с противоупорами поз. 42 и поз. 40.
В коленном сочленении задний коленный упругий элемент поз. 37 устанавливают на автоматическом регулируемом коленном упоре, расположен ном на задней поверхности звена голени поз. 38. Данный упор автоматически перестает препятствовать сгибанию в коленном сочленении в период переноса при сгибании в коленном суставе более, чем на 20 град. Еще один упругий элемент располагают спереди коленного сочленения соединяя его одним концом с консолью поз. 35, размещаемой на звене голени поз. 27, а другим концом устанавливая на консоли поз. 36, размещаемой на звене бедра поз. 28. Причем на коленном сочленении спереди располагают контактирующую с этим упругим элементом направляющую, по которой он скользит в период переноса. Два упругих элемента поз. 31 и поз. 33 устанавливают на упорах один спереди и один сзади от голеностопного шарнирного узла, которые контактируют с противоупорам и поз. 32 и поз. 34. Еще упругие элементы рессорного типа поз. 30 в виде упруго-гибких пластин устанавливают на подошвенной части звена стопы поз. 26 жестко охватывая пяточную область с переходом в средней области в аркообразную упругую часть, заканчивающуюся спереди в области плюснефалангового и межфалангового участка сочленения рессорного типа пластинами. Данные упругие элементы рессорного типа поз. 30 изготавливают индивидуально из композиционного материала на основе углеткани и ткани Русар, таким образом, чтобы распластывание аркообразного участка в фазу опоры на всю стопу не осуществлялось полностью под массой данного больного, а между нижней поверхностью пластины и опорной поверхностью по центральной линии оставался зазор не менее 3 мм. При этом в фазу заднего толчка при изгибе передние рессорного типа пластины поз. 30 обеспечивают изгиб в межфаланговом участке и плюснефаланговом сочленении до 25-30° с обеспечением момента сил не менее 50Нм в соответствии с индивидуальными антропометрическими характеристиками и медико-биомеханическими показаниями.
Упругие элементы в тазобедренном, коленном и голеностопном сочленениях выполняют градуированными, разноцветными, регулируемыми по жесткости и габаритам, они работают на сжатие, кроме переднего коленного упругого элемента поз. 35, работающего на растяжение.
Установленные в соответствии с предложенным способом упругие элементы работают в основные фазы и периоды шага БТС, изображенные на фиг. 6÷10, следующим образом.
Период опоры начинается с фазы переднего толчка, как это представлено на фиг. 6. Эта фаза характеризуется началом возрастания вертикальной составляющей вектора опорной реакции, минимумом положения ОМЦ, максимальным сгибанием в ТБС и, следовательно, максимальным выносом конечности вперед, а также необходимостью обеспечения подкосоустойчивости в коленном сочленении и снижения ударной нагрузки. Наиболее активно в эту фазу работает большая ягодичная, четырехглавая бедра и передняя большеберцовая мышцы. При соприкосновении пятки с опорной поверхностью подошвенная поверхность звена стопы поз. 26 находится к ней под углом α, звено голени поз. 27 - под углом β к стопе. Звенья голени поз. 27 и бедра поз. 28 расположены на одной прямой, коленное сочленение выпрямлено. Звено бедра поз. 28 согнуто под углом Δ в тазобедренном сочленении относительно вертикали. Упругие элементы в данную фазу функционируют следующим образом, обеспечивая дополнительные моменты сил в сочленениях и воздействуя на движения во взаимосвязи с ослабленными вследствие поражений, мышцами. Задний голеностопный упругий элемент поз. 33 сжимается, воспринимая на себя ударную нагрузку при постановке конечности на опорную поверхность, накапливая потенциальную энергию и обеспечивая создание момента сил Мг на разгибание, в то время как передний голеностопный упругий элемент поз. 31 находится в исходном ненагруженном состоянии. Задний коленный упругий элемент поз. 37 выполнен таким образом, что поджат на 15-20% от максимального сжатия, что обеспечивает сопротивление резкому подгибанию, которое может возникнуть в первые моменты (0-5%) времени шага и его функционал - страхование от потери подкосоустойчивости. Передний коленный упругий элемент поз. 35 находится в исходном ненагруженном состоянии, также, как и задний тазобедренный упругий элемент. В тоже время передний тазобедренный упругий элемент поз. 39 находится в сжатом состоянии и, воспринимая нагрузку, создает момент сил Мт, направленный на разгибание звена бедра поз. 28, что согласуется с моментом остаточных внутренних мышечных сил конечности. Тем самым расположенный подобным образом задний коленный упругий элемент поз. 37 обеспечивает функциональную поддержку движений по разгибанию бедра и препятствует резкому подкашиванию в коленном сочленении. Подошвенный элемент с носковым упругим элементом поз. 30 находится в исходном не нагруженном состоянии.
В фазу подгибания фи г. 7 происходит снижение до максимального значения положения ОЦМ, в то время как отмечается максимум вектора вертикальной составляющей опорной реакции, превышающей по значению массу БТС. БТС как бы немного приседает от удара и здесь также необходимо дополнять ослабленные функции опорно-двигательной системы. Упругие элементы, расположенные согласно предложенному способу, функционируют во время данной фазы следующим образом. Передний и задний голеностопные упругие элементы поз. 31 и поз. 33 находятся в предварительно напряженном состоянии, создавая поочередно противоположные направления момента сил Мг, удерживая, таким образом, голень поз. 27 в стабильном подпружиненном положении. Задний коленный упругий элемент поз. 37 сжат до максимума, обеспечивая запас потенциальной энергии, полученный под действием массы вышележащих звеньев. Передний коленный упругий элемент поз. 35 не оказывает влияние на момент сил Мк, т.к. начинает растягиваться только при угле в коленном суставе больше 20°. Задний тазобедренный упругий элемент поз. 41 находится в ненагруженном состоянии и не оказывает влияния на Мт, в отличии от переднего тазобедренного упругого элемента поз. 39, который сжат и создает дополнительный момент сил на разгибание в тазобедренном сочленении, обеспечивая повышение функциональности БТС, имеющей недостаточные мышечные возможности. Подошвенный элемент с носковым упругим элементом поз. 30 в этой фазе распластывается, не оказывая влияния на носковую часть, благодаря чему, в соответствии с предложенным способом, обеспечивается амортизация от максимальной нагрузки на стопу поз. 26.
Еще одно положение БТС с упругими элементами представлено на фиг. 8 и оно характеризует фазу опоры на всю стопу опорного периода перед началом фазы заднего толчка. Эта фаза характеризуется близким ко второму максимуму вертикальной составляющей опорной реакции, нахождением ОЦМ несколько выше среднего значения и работой в основном икроножной мышцы. Коленное сочленение выпрямлено, голеностопное сгибается, а тазобедренное разгибается, готовясь к заднему толчку на несколько градусов. При этом упругие элементы функционируют следующим образом. Передний голеностопный упругий элемент поз. 31 несколько сжимается, воздействуя на момент сил Мг, в то время как задний голеностопный упругий элемент поз. 33 находится в исходном ненагруженном состоянии. Задний коленный упругий элемент поз. 37 также в исходном несколько подпружиненном состоянии, а передний коленный упругий элемент поз. 35 в нейтральном состоянии. Задний тазобедренный упругий элемент поз. 41 начинает сжатие вследствие разгибания в ТБС, в то время как передний тазобедренный упругий элемент поз. 39 - в нейтральном состоянии. Средняя часть упругого элемента подошвенной части поз. 30 звена стопы поз. 26 в эту фазу распластывается, а передняя часть в области плюснефалангового и межфаланговых участков представляющая рессорные пластины незначительно сгибается.
Функционирование упругих элементов в фазу заднего толчка представлено на фи г. 9. В эту фазу наибольший угол разгибания достигается в ТБС, при этом задний тазобедренный упругий элемент поз. 41 сжимается на максимальную величину, обеспечивая в последующем момент сил Мт на разгибание и последующее сгибание, в то время как передний тазобедренный упругий элемент поз. 39 находится в нейтральном состоянии. Задний коленный упругий элемент поз. 37 несколько поджат, а передний коленный упругий элемент поз. 35 в нейтральном положении. Наибольшее сжатие испытывает задний голеностопный упругий элемент поз. 33, а также рессорные пластины плюснефалангового и межфалангового участков поз. 30, создавая максимально возможные моменты сил Мп и Мг обеспечивающие отталкивание от опорной поверхности и движение всей БТС вперед.
В следующую фазу - переноса конечности (фиг. 10) звено бедра ноз. 28, вынесенное вперед и согнутое в ТБС, в том числе и за счет действия заднего тазобедренного упругого элемента поз. 41 поджимает передний тазобедренный упругий элемент поз. 39, который в первую очередь тормозит излишнее сгибание звена бедра поз. 28, а во вторую создает момент сил на разгибание в ТБС. Задний коленный упругий элемент поз. 37 за счет срабатывания автоматического замка не препятствует сгибанию в КС на угол γ. Передний коленный упругий элемент поз. 35 растянут, и создает момент сил Мк направленный на разгибание в КС. Голеностопные упругие элементы поз. 31 и поз. 33 находятся в предварительно установленном несколько сжатом состоянии. Возможен вариант исполнения, при котором момент сил за счет голеностопного заднего упругого элемента поз. 33 несколько поднимает носковую часть звена стопы поз. 26 для ее более комфортного переноса над поверхностью. Положение подошвенного упругого элемента поз. 30 нейтрально.
Осуществление движения в коленном суставе наиболее сложно, что представлено в виде последовательных положений суставного конца большеберцовой кости поз. 44 относительно бедренной кости поз. 43, как это показано на фиг. 11. Движение происходит вокруг перемещающейся в зависимости от утла сгибания кривой образуемой мгновенными центрами вращения сложной формы поз. 45 подобной циклоиде. Строение коленного сустава обеспечивает укорочение нижней конечности во время периода переноса и смещение голени способствующее обеспечению подкосоустойчивости. Обеспечение в соответствии со способом БТС полицентрическим коленным шарнирным узлом с траекторией центра вращения в виде циклоиды представленной на фиг. 11 повышает двигательные функции, уменьшая длину конечности во время переноса, а также осуществляя повышение жесткости заднего коленного упругого элемента в фазу подгибания за счет уменьшения расстояния между звеньями бедра поз. 28 и голени поз. 27. При этом в полицентрическом коленном шарнирном узле начальную мгновенную точку циклоиды удаляют от мгновенной точки при угле сгибания на 60 градусов звена голени относительно звена бедра не менее чем на 10 мм.
Заявленный способ, в части местонахождения осей шарнирных узлов, может быть определен следующим образом. Определяют местоположение центра оси тазобедренного, коленного, голеностопного суставов в проекции на сагиттальную плоскость, что возможно осуществить врачом-ортопедом пальпацией после проведения наклонов туловища или с помощью рентгеновского снимка в сагиттальной плоскости, отмечая центр оси тазобедренного сустава с помощью отвеса или лазерной вертикальной линии, совмещают с вертикалью центры коленного и голеностопного суставов и отмечают их на теле больного, например, специальным карандашом. В процессе снятия гипсового негатива, а затем изготовления позитива отметки центров с вертикальной линии отражаются на их поверхностях, а затем отмечаются на гильзах. При установке шарнирных узлов центры вращения их осей устанавливают в соответствии с отметками. В случае несоответствия мест установки осей шарнирных узлов с осями суставов нижней конечности, происходит разбалансировка движений звеньев ОАНК и сегментов конечности как это, условно схематично, показано на фиг. 12, в фазах переднего толчка, заднего толчка, а также в период переноса (а, б, в).
Ниже представлен пример осуществления способа.
Предлагаемый способ повышения двигательных функций при ходьбе в ортопедическом аппарате был применен для лечения больной Л-ой, возраст 34 года, рост 165 см. Диагноз: парез мышц правой нижней конечности вследствие вялого паралича. Ранее больная Л-ва пользовалась ОАНК с приводами, с внешним источником энергии и электростимулятором, причем электростимуляция проводилась в ограниченном режиме в связи с сопутствующими заболеваниями. Были зафиксированы некоторые биомеханические характеристики ходьбы в этом ОАНК. Затем осуществлено оргезирование больной Л-ой согласно предложенному способу. Больной были изготовлены гипсовые негативы, а по ним гипсовые позитивы сегментов туловища, бедра и голени со стопой. Затем с помощью основания с упором и весов были определены центры масс позитивов голени со стопой фиг. 1 и бедра. По готовым гипсовым позитивам были изготовлены гильзы стопы поз. 21 (фиг. 4) со встроенными упругими элементами рессорного типа поз. 30 (фиг. 6), голени, бедра и полукорсета, установлены тазобедренный шарнирный узел, коленные полицентрические, с осью вращения, описывающие кривую в виде циклоиды поз. 45 (фиг. 11), шарнирные узлы и голеностопные шарнирные узлы. Причем в проекции на сагиттальную плоскость оси шарнирных узлов размещали их так, чтобы они совпадали с осями соответствующих суставов в вертикальном положении ноги (по так называемой линии Ми кулича). На всех гильзах устанавливали в области шарнирных узлов регулируемые упоры. Причем задний коленный упор поз. 37 выполнялся автоматически управляемым в зависимости от нагрузки на стопу, а передний тазобедренный упор поз. 39 имел рукоятку, поворачивая которую больная могла согнуть ногу в тазобедренном шарнире для осуществления сидения. Собранный ОАНК снабжался электроприводами с системой управления и внешним источником энергии.
На изготовленном имитационном устройстве нижней конечности фиг. 2 выставлялись весовые и дли нотные параметры идентичные параметрам больной Л-ой и прикладывая к тянке поз. 16 (фиг. 3) усилие определялась частота собственных колебаний звена голени поз. 11 со стопой поз. 13, регулируя их до оптимального значения свойственного произвольному темпу ходьбы.
Затем на имитационное устройство нижней конечности устанавливали ОАНК и снова определяли частоту собственных колебаний звена голени поз. 11 со стопой поз. 13. Для получения оптимальных значений в ОАНК была переделана гильза стопы поз. 21 (фиг. 4), в которой металлические шины были заменены на облегченные композитные, благодаря чему частота собственных колебаний звена голени поз. 11 со стопой поз. 13 приблизилась к частоте при произвольном темпе ходьбы.
Затем у больной Л-ой было проведено определение электрической активности мышц правой нижней конечности с помощью электромиографии. Выявленная недостаточная активность с пониженной амплитудой послужили для выбора жесткости упругих элементов. После изготовления и установки переднего и заднего голеностопных поз. 31 и поз. 33 и тазобедренных поз. 39 и поз. 41 упругих элементов, а также заднего и переднего коленного упругих элементов поз. 35 и поз. 37 проведено обучение ходьбе больной Л-ой. Затем осуществлена самостоятельная ходьба больной как это представлено на фиг. 13.
В процессе ходьбы определялись параметры, характеризующие двигательные функции. Отмечено увеличение длины шага, как на ортезированной, так и здоровой конечностью, темпа ходьбы на 12±5%, приближаясь к произвольному темпу свойственному человеку с подобными масс-габаритными характеристикам и в норме, улучшилась ритмичность.
Больной в ОАНК изготовленном в соответствии с предлагаемым способом значительно легче стало производить вынос звеньев конечности, улучшилась амортизация в фазу переднего толчка. Отмечено более плавное осуществление подгибания в коленном суставе в период опоры и дополнительное воздействие заднего коленного упругого элемента поз. 37 в эту фазу во время разгибания, что позволило поднимать туловище несколько выше, чем при ходьбе на ранее использовавшемся ОАНК. Больная ощущала более «энергичный» вынос пораженной конечности в тазобедренном суставе и повышение ритмичности как сгибания, так и разгибания в коленном суставе. При ходьбе больная ощущала движения пальцев в стопе пораженной конечности, чего ранее не было в старом ОАНК. Выявлено снижение потребления заряда внешнего источника энергии, что позволило устанавливать аккумулятор меньшей массы и габаритов. Произведен подбор приводов с меньшими габаритами, массой, так как их мощность была определена излишней в сочетании с использованием рациональной массы звена голени поз. 27, системой упругих элементов, обеспечением движений в ПФС, полицентричностью коленного сочленения и рациональным расположением осей шарниров по отношению к осям суставов. Больная отметила отсутствие поршневых движений ноги относительно гильз аппарата в процессе ходьбы.
Наружный осмотр после снятия ОАНК показал отсутствие потертостей, наминов, наблюдавшихся при ходьбе в ранее использовавшемся ОАНК, а также улучшение кровообращения в пальцах пораженной конечности. После осмотра ортопед дал положительную оценку влияния ОАНК и рекомендовал дальнейшее использование в течение 6 месяцев. Контрольный осмотр больной через 5,5 месяцев подтвердил улучшение ее состояния по сравнению с состоянием до применения нового ОАНК в соответствии с предлагаемым способом. Отмечено улучшение статокинетической устойчивости, нормализация рисунка ходьбы, меньшая усталость при ходьбе. Врач-ортопед положительно оценил применение нового ОАНК и рекомендовал его ношение в дальнейшем.
Примеры апробации показали эффективность предложенного способа повышения двигательных функций при ходьбе в ОАНК. На основании практического использования были выданы рекомендации по снижению массы, габаритов мощности приводов емкости, габаритов аккумуляторов.
Предложенный способ повышения двигательных функций при ходьбе больного в ОАНК с обеспечением в процессе ходьбы рационных масс-инерционных характеристик звеньев ОАНК в совокупности с изменившимися масс-инерционными характеристиками сегментов конечности, функционирования встроенных в области звеньев стопы, голеностопного, коленного, тазобедренного шарнирных узлов системы упругих элементов, применение коленного шарнирного узла с полицентрической осью вращения в виде определенной циклоиды, определенным расположением осей шарнирных узлов по отношению к осям суставов обеспечивает нормализацию биомеханических характеристик ходьбы пациентов, повышение их активности в повседневной жизни, снижение усталости, энергозатрат, приближение рисунка ходьбы к норме.
После проведения ортезирования с использованием предложенного способа повысились двигательные функции ходьбы, снизились показатели инвалидизации, повысился уровень адаптации.
Таким образом, преимуществами предлагаемого изобретения «Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей» по сравнению с прототипом являются следующие:
- определение и реализация рациональных масс-инерционных характеристик звеньев ОАНК, что позволяет получение при ходьбе нормализации частоты собственных колебаний и приведение темпа ходьбы к произвольному, наименее энергоемкому;
- получение рекуперации энергии за счет применения системы упругих элементов, встраиваемых в конструкцию ОАНК;
- использование полицентрического коленного шарнирного узла с определенной траекторией мгновенных центров вращения;
- определенное расположение осей шарнирных узлов, совпадающее с расположением осей соответствующих суставов в проекции на сагиттальную плоскость;
- обеспечение движений в плюснефаланговом и межфаланговых суставах в стопе пораженной конечности;
- нормализация биомеханических характеристик ходьбы, снижение утомляемости, энергозатрат при ходьбе больных;
- получение социально-экономического эффекта за счет снижения выраженных ограничений жизнедеятельности, повышения качества жизни, степени самообслуживания, повышения эффективности и снижения сроков реабилитации, что снизит бюджетные затраты.
Источники информации:
1. Патент: Способ укрепления мышц пораженной конечности и ортопедический аппарат для его осуществления.
http://www.freepatent.ru\patents\2088273
1. Экзоскелет с электростимуляцией в ходьбе
https://ok.ru/video/1895722257037
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| Аппарат ортопедический на всю ногу | 2018 |
|
RU2708841C1 |
| СПОСОБ РЕАЛИЗАЦИИ ЗАДНЕГО ТОЛЧКА ПРИ ОСЛАБЛЕНИИ МЫШЦ ДИСТАЛЬНОЙ ЧАСТИ НИЖНЕЙ КОНЕЧНОСТИ И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2092134C1 |
| Протез нижней конечности | 1984 |
|
SU1319845A1 |
| Протез нижней конечности | 1982 |
|
SU1026802A1 |
| Способ лечения спастических парезов нижних конечностей | 1988 |
|
SU1644926A1 |
| Способ реабилитации пациентов с заболеваниями суставов нижних конечностей | 2022 |
|
RU2800254C1 |
| Способ гидрокинезиотерапии пациентов после односторонней ампутации нижней конечности | 2024 |
|
RU2826980C1 |
| СПОСОБ НЕЙРОДИНАМИЧЕСКОЙ (НЕЙРОСЕНСОРНОЙ) КОРРЕКЦИИ ДЛЯ ВОССТАНОВЛЕНИЯ ДВИГАТЕЛЬНЫХ, ПОЗНЫХ, СЕНСОРНЫХ И КОГНИТИВНЫХ ФУНКЦИЙ У БОЛЬНЫХ С ПАТОЛОГИЕЙ НЕРВНОЙ СИСТЕМЫ И ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И КОСТЮМ ДЛЯ ЕГО ПРИМЕНЕНИЯ | 2013 |
|
RU2573535C2 |
| МОДУЛЬНЫЙ ОРТОПЕДИЧЕСКИЙ АППАРАТ | 2006 |
|
RU2309709C1 |

Изобретение относится к медицине. Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей, заключающийся в изготовлении в соответствии с медицинскими показаниями назначаемого больному ортопедического аппарата нижней конечности (ОАНК), содержащего звено его крепления на туловище, звено бедра, соединенные тазобедренным шарнирным узлом с осью, звено голени, соединенное со звеном бедра коленными шарнирными узлами с осью, голеностопные шарнирные узлы с осью, соединенные верхней частью с гильзами голени, а нижней - со звеном стопы, имеющим жесткую подошвенную пластину, включающую плюснефаланговый и межфаланговый участки, электростимулятор с источником питания и накожными электродами, установленными в области одного из суставов, а также электроприводов шарнирных узлов с осями с системой управления и внешнего источника энергии. Предварительно (вначале) изготавливают гипсовые негативы, а по ним гипсовые позитивы сегментов бедра и голени со стопой нижней конечности больного. Определяют в проекции на сагиттальную плоскость их центры масс. Изготавливают ОАНК с электростимулятором и накожными электродами, электроприводами шарнирных узлов. Проводят определения центров масс звеньев бедра и голени со стопой ОАНК, совмещают их с центрами масс гипсовых слепков бедра и голени со стопой соответственно. Изготавливают имитационное устройство нижней конечности, имеющее регулируемые весовые и длинотные параметры нижней конечности, тазобедренную, коленную, голеностопную оси. Выставляют центры масс звеньев бедра и голени со стопой устройства в соответствии с центрами масс гипсовых позитивов сегментов бедра и голени со стопой больного. Проводят определение частоты собственных колебаний звеньев имитационного устройства нижней конечности. Регулируют положение звена голени со стопой. Определяют частоту собственных колебаний звена голени со стопой. Устанавливают изготовленный ОАНК на имитационном устройстве нижней конечности, определяют частоту собственных колебаний звена голени со стопой имитационного устройства нижней конечности со звеном голени со стопой ОАНК, регулируют положение центра масс звена голени со стопой ОАНК изменяя расположение масс деталей и узлов в звене голени и звене стопы, коленного шарнирного узла, перемещения места установки приводов, приближая частоту собственных колебаний звена голени и бедра БТС к частоте, свойственной произвольному темпу ходьбы больного среднестатистического человека с подобными медицинскими показаниями и антропометрическими данными. Определяют степень патологического поражения мышц нижней конечности и выбирают в зависимости от степени поражения, пропорционально степени поражения жесткости передних и задних тазобедренного, коленного и голеностопного упругих элементов. Затем устанавливают на звеньях голени и стопы задний и передний регулируемые голеностопные упоры с задним и передним противоупорами. На звене голени устанавливают задний автоматический регулируемый коленный упор и соединяют его с системой управления. На звене бедра сзади устанавливают противоупор звена бедра. Спереди на звеньях голени и бедра устанавливают консоли. В верхней части звена бедра сзади размещают задний регулируемый бедренный упор. На задней поверхности звена крепления туловища устанавливают задний туловищный упор. На передней поверхности звена бедра устанавливают регулируемый упор. На звене крепления на туловище имеется передний туловищный противоупор. Затем изготавливают упругие элементы и их устанавливают на задний и передний регулируемые голеностопные упоры, на задний автоматический регулируемый коленный упор, на консоли, на задний регулируемый бедренный упор и регулируемый упор в соответствии с определенными ранее жесткостями. Выполняют подошвенную пластину из композиционного материала жесткой в пяточном отделе, аркообразной в центральной части и упругогибкой в виде пластин в области плюснефалангового и межфалангового участков. Выполняют коленный шарнирный узел с полицентрической осью вращения в виде циклоиды, начальная мгновенная точка вращения которой отстоит от мгновенной точки вращения при угле сгибания в коленном шарнирном узле 60 градусов не менее чем на 10 мм. Центр оси тазобедренного шарнирного узла совмещают с центром оси тазобедренного сустава. Мгновенный центр вращения оси полицентрических коленных шарнирных узлов в выпрямленном до упора положении совмещают с условным центром оси коленного сустава в выпрямленном состоянии, а центры осей голеностопных шарнирных узлов совмещают с центрами оси голеностопного сустава. Изобретение обеспечивает повышение двигательных функций при ходьбе больного в ортопедическом аппарате нижней конечности (ОАНК) с последствиями спастических, вялых параличей, парезов нижних конечностей, сопровождающихся патологическими установками, контрактурами в суставах, снижением двигательных функций, оптимизации биомеханических характеристик в возникающей биотехнической системе (БТС) «ОАНК-нижняя конечность», таких как масс-инерционные характеристики звеньев, составляющих моментов внешних сил за счет рекуперации энергии упругими элементами в тазобедренном, коленном и голеностопном шарнирных узлах и плюснефаланговом и межфаланговом участках звена стопы, исключения обездвиживания в плюснефаланговых и межфаланговых суставах стопы, соблюдения соосности коленного шарнирного узла и коленного сустава, исключения поршневых движений конечности в ОАНК, оптимизации схемы построения, способствующей повышению двигательных функций и тем самым повышению уровня реабилитации, мобильности, активности в повседневной жизни, снижению инвалидизации, выраженных ограничений жизнедеятельности. 13 ил., 1 пр.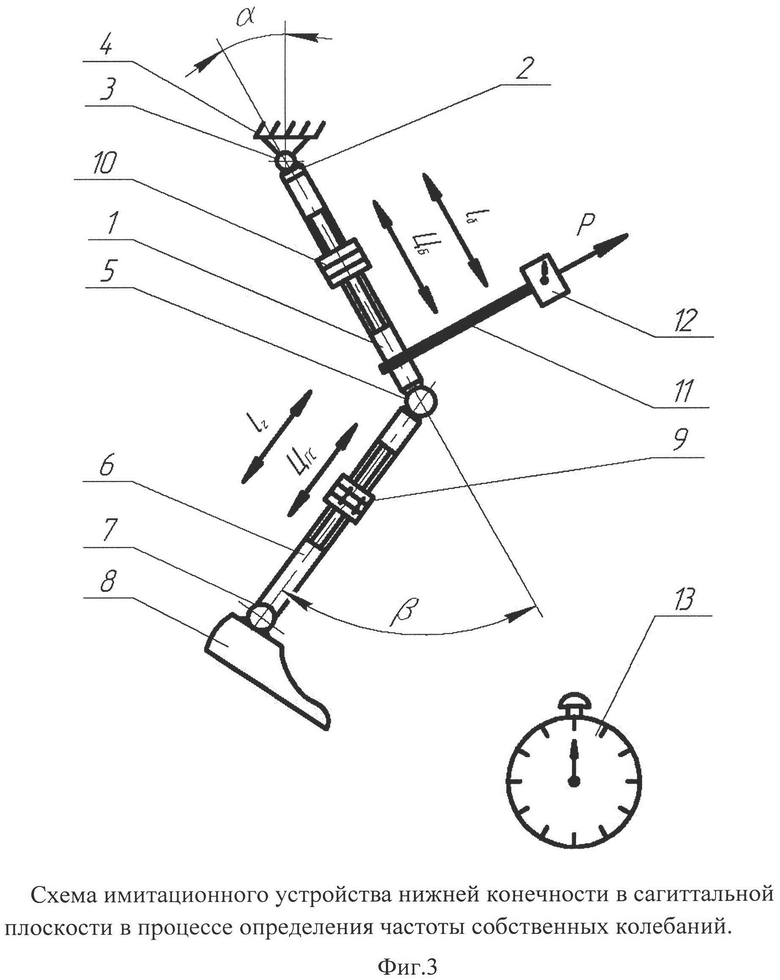
Способ изготовления ортопедического аппарата нижней конечности для больных с последствиями параличей нижних конечностей, заключающийся в изготовлении в соответствии с медицинскими показаниями назначаемого больному ортопедического аппарата нижней конечности (ОАНК), содержащего звено его крепления на туловище, звено бедра, соединенные тазобедренным шарнирным узлом с осью, звено голени, соединенное со звеном бедра коленными шарнирными узлами с осью, голеностопные шарнирные узлы с осью, соединенные верхней частью с гильзами голени, а нижней - со звеном стопы, имеющим жесткую подошвенную пластину, включающую плюснефаланговый и межфаланговый участки, электростимулятор с источником питания и накожными электродами, установленными в области одного из суставов, а также электроприводов шарнирных узлов с осями с системой управления и внешнего источника энергии, отличающийся тем, что предварительно вначале изготавливают гипсовые негативы, а по ним гипсовые позитивы сегментов бедра и голени со стопой нижней конечности больного, определяют в проекции на сагиттальную плоскость их центры масс, изготавливают ОАНК с электростимулятором и накожными электродами, электроприводами шарнирных узлов, проводят определения центров масс звеньев бедра и голени со стопой ОАНК, совмещают их с центрами масс гипсовых слепков бедра и голени со стопой соответственно, изготавливают имитационное устройство нижней конечности, имеющее регулируемые весовые и длинотные параметры нижней конечности, тазобедренную, коленную, голеностопную оси, выставляют центры масс звеньев бедра и голени со стопой устройства в соответствии с центрами масс гипсовых позитивов сегментов бедра и голени со стопой больного, проводят определение частоты собственных колебаний звеньев имитационного устройства нижней конечности, регулируют положение звена голени со стопой, определяют частоту собственных колебаний звена голени со стопой, устанавливают изготовленный ОАНК на имитационном устройстве нижней конечности, определяют частоту собственных колебаний звена голени со стопой имитационного устройства нижней конечности со звеном голени со стопой ОАНК, регулируют положение центра масс звена голени со стопой ОАНК изменяя расположение масс деталей и узлов в звене голени и звене стопы, коленного шарнирного узла, перемещения места установки приводов, приближая частоту собственных колебаний звена голени и бедра БТС к частоте, свойственной произвольному темпу ходьбы больного среднестатистического человека с подобными медицинскими показаниями и антропометрическими данными, определяют степень патологического поражения мышц нижней конечности и выбирают в зависимости от степени поражения, пропорционально степени поражения жесткости передних и задних тазобедренного, коленного и голеностопного упругих элементов, затем устанавливают на звеньях голени и стопы задний и передний регулируемые голеностопные упоры с задним и передним противоупорами, на звене голени устанавливают задний автоматический регулируемый коленный упор и соединяют его с системой управления, а на звене бедра сзади устанавливают противоупор звена бедра, при этом спереди на звеньях голени и бедра устанавливают консоли, а в верхней части звена бедра сзади размещают задний регулируемый бедренный упор, причем на задней поверхности звена крепления туловища устанавливают задний туловищный упор, при этом на передней поверхности звена бедра устанавливают регулируемый упор, а на звене крепления на туловище имеется передний туловищный противоупор, затем изготавливают упругие элементы и их устанавливают на задний и передний регулируемые голеностопные упоры, на задний автоматический регулируемый коленный упор, на консоли, на задний регулируемый бедренный упор и регулируемый упор в соответствии с определенными ранее жесткостями, выполняют подошвенную пластину из композиционного материала жесткой в пяточном отделе, аркообразной в центральной части и упругогибкой в виде пластин в области плюснефалангового и межфалангового участков, выполняют коленный шарнирный узел с полицентрической осью вращения в виде циклоиды, начальная мгновенная точка вращения которой отстоит от мгновенной точки вращения при угле сгибания в коленном шарнирном узле 60 градусов не менее чем на 10 мм, при этом центр оси тазобедренного шарнирного узла совмещают с центром оси тазобедренного сустава, мгновенный центр вращения оси полицентрических коленных шарнирных узлов в выпрямленном до упора положении совмещают с условным центром оси коленного сустава в выпрямленном состоянии, а центры осей голеностопных шарнирных узлов совмещают с центрами оси голеностопного сустава.
| СПОСОБ УКРЕПЛЕНИЯ МЫШЦ ПОРАЖЕННОЙ НИЖНЕЙ КОНЕЧНОСТИ И ОРТОПЕДИЧЕСКИЙ АППАРАТ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2088273C1 |
| Способ промывки сырца красного фосфора | 1929 |
|
SU16657A1 |
| СПОСОБ КОРРЕКЦИИ ДВИЖЕНИЙ ПРИ ХОДЬБЕ В РАЗНОМ ТЕМПЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2082452C1 |
| Устройство для коррекции движений | 1989 |
|
SU1681866A1 |
| Аппарат ортопедический на всю ногу | 2018 |
|
RU2708841C1 |
| РАСШИРИТЕЛЬ ГОРИЗОНТАЛЬНЫХ СКВАЖИН | 2000 |
|
RU2186191C2 |

