Изобретение относится к медицинской технике, в частности, к техническим средствам реабилитации инвалидов и может быть использовано для задания желаемых траекторий движения экзоскелета, предназначенного для пользователей с нарушением функций опорно-двигательного аппарата.
Известен способ задания желаемых траекторий движения для передвижения пользователя с нарушением функций опорно-двигательного аппарата (патент RU 2598124), обеспечивающий возможность управления экзоскелетом внешним компьютером ассистента, при этом управляющие сигналы на приводы экзоскелета формируются с учетом масс-инерционных характеристик сегментов тела пациента, элементов экзоскелета и требований к качеству управления.
Недостатком известного способа является ограниченные возможности обеспечения максимальной комфортности во взаимодействии пациента с экзоскелетом в процессе передвижения в условиях быстро возникающих потребностей изменения параметров движения в зависимости от изменяющихся внешних условий и самочувствия пациента.
Известен способ дистанционного управления манипулятором (патент RU 125508) оператором посредством управляющей системы, в шарнирных кинематических звеньях которой установлены энкодеры для формирования управляющих сигналов приводам шарниров манипулятора.
Недостатком известного способа при использовании его для управления экзоскелетом является отсутствие обратной связи между ассистентом и пациентом в экзоскелете, что снижает комфортность во взаимодействии пациента с экзоскелетом, обусловленную невозможностью обеспечения максимального совпадения желаемого паттерна ходьбы пациента в экзоскелете с паттерном ходьбы человека без нарушения функций опорно-двигательного аппарата.
Технический результат изобретения - повышение уровня комфортности во взаимодействии пациента с экзоскелетом.
Указанный технический результат достигается тем, что способ управления экзоскелетом реализуется путем задания траекторий движения экзоскелета ассистентом дистанционно, с помощью установленных на конечностях ассистента управляющей части, содержащей датчики углов и угловых скоростей с осями, совпадающими с осями шарнирных сочленений ассистента, соответствующих шарнирным сочленениям конечностей экзоскелета и формирующих управляющие сигналы на приводы экзоскелета, при этом организована обратная связь от пациента в экзоскелете к ассистенту на основе информации, отображающей уровень комфортности двигательного процесса для пациента, выражающаяся в воздействии на ассистента в виде звуковых, световых, вибрационных сигналов, кроме того, источник электропитания экзоскелета может нести ассистент, а энергоподвод к экзоскелету обеспечивается кабелем, а также ассистент может нести сменные источники электропитания.
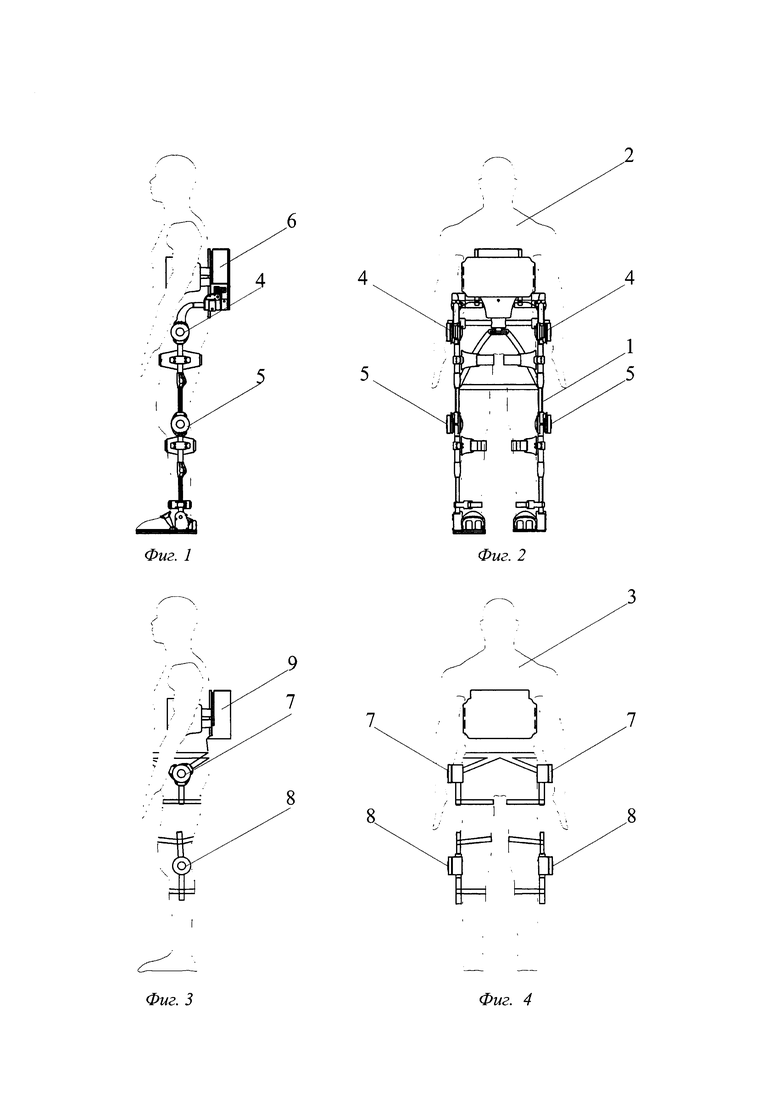
Сущность изобретения поясняется рисунками, где: на фиг. 1 изображен пациент в экзоскелете, вид сбоку; на фиг. 2 - пациент в экзоскелете, вид спереди; на фиг. 3 - ассистент с системой датчиков, вид сбоку; на фиг. 4 - ассистент, вид спереди.
Экзоскелет 1 с пациентом 2 управляется ассистентом 3. При этом экзоскелет 1 содержит приводы 4 тазобедренных суставов и приводы 5 коленных суставов с источником электропитания 6. Ассистент 3 снаряжен датчиками 7 и 8, соосно расположенными относительно осей тазобедренных и коленных суставов ног ассистента. Датчики 7 и 8 обеспечивают слежение углов и угловых скоростей при сгибании тазобедренных и коленных суставов ассистента. Экзоскелет 1, кроме источника электропитания 6, имеет сменный источник электропитания 9, который несет на себе ассистент 3.
Способ управления экзоскелетом осуществляется следующим образом. Управление экзоскелетом 1 осуществляется ассистентом 3, совершающим необходимые для пациента 2 движения. Датчики 7 и 8 углов и угловых скоростей формируют управляющие сигналы для приводов 4 и 5 экзоскелета 1. Это обеспечивает в реальном режиме времени повторение движений, совершаемых ассистентом 3. При этом организована обратная связь от пациента 2 в экзоскелете 1 к ассистенту 3 на основе информации, отображающей уровень комфортности двигательного процесса для пациента, выражающаяся в воздействии на ассистента в виде звуковых, световых, вибрационных сигналов. Эти сигналы предупреждают ассистента о необходимости снижения темпа передвижения. При этом, источник электропитания 9, который несет ассистент, может исключить необходимость наличия источника электропитания 6 на экзоскелете 1, а электроподвод к экзоскелету 1 может обеспечиваться кабелем. Это обеспечит снижение массы экзоскелета и, как следствие, снижение его инерционности. А также источник электропитания 9 может служить дополнительным (сменным) источником электропитания экзоскелета 1, что увеличивает время автономной работы экзоскелета и радиус его действия.
Применение предложенного способа управления экзоскелетом позволяет повысить уровень комфортности взаимодействия пациента с экзоскелетом и, как следствие, повысить эффективность реабилитационного процесса.
| название | год | авторы | номер документа |
|---|---|---|---|
| Аппарат ортопедический на нижнюю конечность с микропроцессорным управлением | 2021 |
|
RU2793532C1 |
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| СПОСОБ АДАПТАЦИИ ЭКЗОСКЕЛЕТА К АНТРОПОМЕТРИЧЕСКИМ ПАРАМЕТРАМ ПОЛЬЗОВАТЕЛЯ | 2019 |
|
RU2733043C2 |
| СПОСОБ ЧЕТЫРЕХОПОРНОГО ПЕРЕДВИЖЕНИЯ ДЕТСКОГО ЭКЗОСКЕЛЕТА | 2019 |
|
RU2739278C2 |
| Способ реабилитации больных в различных стадиях нарушений центральной или периферической нервной системы с использованием виртуальной реальности | 2016 |
|
RU2655200C1 |
| СПОСОБ ПРОВЕДЕНИЯ ИСПЫТАНИЙ ЭКЗОСКЕЛЕТА | 2017 |
|
RU2711223C2 |
| СПОСОБ ОБУЧЕНИЯ ХОДЬБЕ И ДВИЖЕНИЯМ ПАЦИЕНТА С ПСИХОНЕВРОЛОГИЧЕСКИМИ НАРУШЕНИЯМИ И ЗАБОЛЕВАНИЯМИ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2454986C1 |
| СПОСОБ РЕАБИЛИТАЦИИ БОЛЬНЫХ ПОСЛЕ ИНСУЛЬТА ИЛИ ТРАВМЫ С ИСПОЛЬЗОВАНИЕМ РОБОТИЗИРОВАННОГО КОМПЛЕКСА, ВКЛЮЧАЮЩЕГО ЭКЗОСКЕЛЕТ КОНЕЧНОСТИ ЧЕЛОВЕКА, УПРАВЛЯЕМЫЙ ЧЕРЕЗ ИНТЕРФЕЙС МОЗГ-КОМПЬЮТЕР ПОСРЕДСТВОМ ВООБРАЖЕНИЯ ДВИЖЕНИЙ | 2015 |
|
RU2622206C2 |
| СПОСОБ ЭНЕРГООБЕСПЕЧЕНИЯ ЭКЗОСКЕЛЕТА | 2019 |
|
RU2745538C2 |
| ЭКЗОСКЕЛЕТ БЕЗОПАСНЫЙ ДЛЯ РАБОТНИКОВ | 2022 |
|
RU2799646C1 |
Изобретение относится к медицине. Способ управления экзоскелетом осуществляется путем задания траекторий движения экзоскелета ассистентом дистанционно с помощью установленной на конечностях ассистента управляющей части. Управляющая часть содержит датчики углов и угловых скоростей с осями, совпадающими с осями шарнирных сочленений ассистента, соответствующих шарнирным сочленениям конечностей экзоскелета и формирующих управляющие сигналы на приводы экзоскелета. Организована обратная связь от пациента в экзоскелете к ассистенту на основе информации, отображающей уровень комфортности двигательного процесса для пациента, выражающейся в воздействии на ассистента в виде звуковых, световых, вибрационных сигналов. Изобретение обеспечивает повышение уровня комфортности во взаимодействии пациента с экзоскелетом. 2 з.п. ф-лы, 4 ил.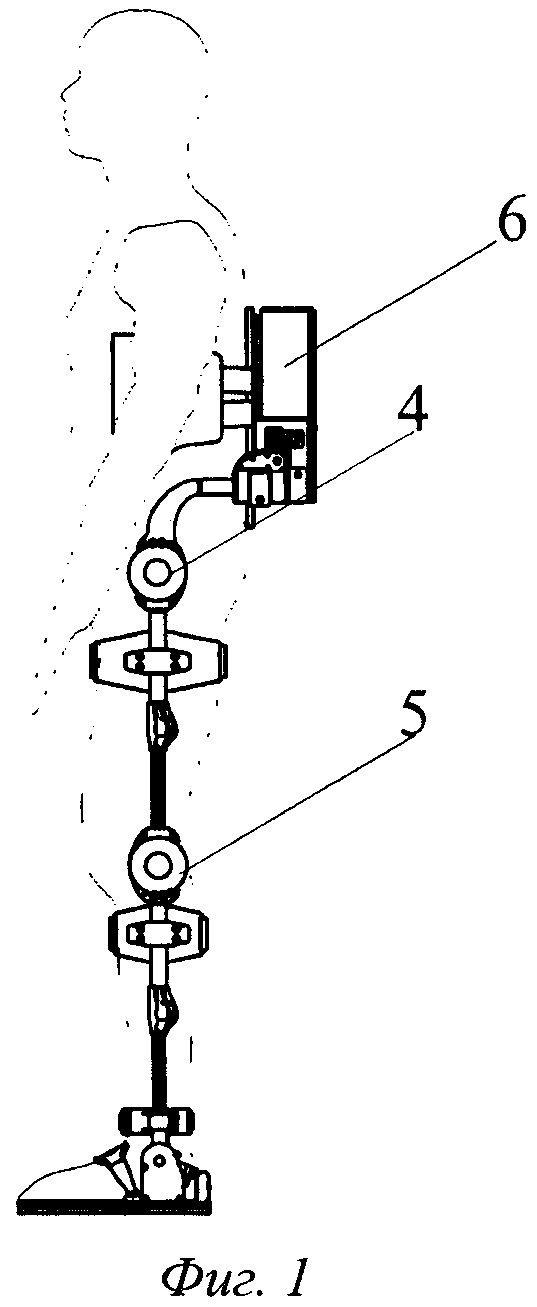
1. Способ управления экзоскелетом путем задания траекторий движения экзоскелета ассистентом дистанционно с помощью установленной на конечностях ассистента управляющей части, содержащей датчики углов и угловых скоростей с осями, совпадающими с осями шарнирных сочленений ассистента, соответствующих шарнирным сочленениям конечностей экзоскелета и формирующих управляющие сигналы на приводы экзоскелета, при этом организована обратная связь от пациента в экзоскелете к ассистенту на основе информации, отображающей уровень комфортности двигательного процесса для пациента, выражающейся в воздействии на ассистента в виде звуковых, световых, вибрационных сигналов.
2. Способ по п. 1, отличающийся тем, что источник электропитания экзоскелета может нести ассистент, при этом энергоподвод к экзоскелету обеспечивается кабелем.
3. Способ по п. 1, отличающийся тем, что ассистент может нести сменные источники электропитания.
| US 20160059412 A1, 03.03.2016 | |||
| СПОСОБ ЗАДАНИЯ ЖЕЛАЕМЫХ ТРАЕКТОРИЙ ДВИЖЕНИЯ ЭКЗОСКЕЛЕТА ДЛЯ ПЕРЕДВИЖЕНИЯ ПОЛЬЗОВАТЕЛЯ С НАРУШЕНИЕМ ФУНКЦИЙ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА, УСТРОЙСТВО СОДЕЙСТВИЯ ХОДЬБЕ ЭТОГО ПОЛЬЗОВАТЕЛЯ И СПОСОБ УПРАВЛЕНИЯ ЭТИМ УСТРОЙСТВОМ | 2015 |
|
RU2598124C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ ШАГАЮЩИМ КОПИРУЮЩИМ РОБОТОМ | 1997 |
|
RU2134193C1 |
| Устройство управления движением экзоскелетона | 1979 |
|
SU942735A1 |
| Каскад электрических машин | 1960 |
|
SU135956A1 |
| СИСТЕМА УПРАВЛЕНИЯ АНТРОПОМОРФНЫМ РОБОТОМ И СПОСОБ УПРАВЛЕНИЯ | 2007 |
|
RU2361726C2 |

