Изобретение касается автоматического и автоматизированного управления направленным движением тоннелепроходческих машин, щитов и т.п.
Известно устройство управления движением проходческого щита, содержащее оптический задатчик направления, модулятор, фотоприемный блок (А.С. №310111 кл. G01C 7/00, 1969). Такое устройство громоздко, не имеет возможности осуществлять обмен информацией посредством лазерного луча.
Наиболее близким техническим решением по достижению цели является изобретение «Система управления движением горной машины» (А.С. №682647, Кл. E21C 35/24, опуб. 30.08.1979 г. Бюллетень №32), состоящая из оптического задатчика направления, фотоприемного блока, триппель-призмы, полупрозрачного зеркала, измерительного блока, блока передачи измеренного расстояния.
Однако эта система громоздка, имеет сложную структуру, не обеспечивает двусторонний обмен информацией посредством лазерного луча, для определения координат щита в пространстве используется сложная следящая система.
Перед авторами стояла задача создания системы контроля положения и управления движением минищита для строительства минитоннелей, обладающей уменьшенными габаритными размерами, использующей статическую систему для определения пространственных координат минищита с высокой точностью, а также возможностью осуществления оперативной связи с аппаратурой, установленной на минищите, посредством лазерного луча с высокой помехозащищенностью и повышенным быстродействием.
Эта задача решена тем, что помимо оптического задатчика направления и фотоприемного блока система имеет блок управления оптическим задатчиком направления, вход которого соединен с первым выходом блока согласования сигналов, а выход с оптическим задатчиком направления, формирующим сфокусированный лазерный луч, подаваемый на хвостовую и ножевую матрицы фотоприемного блока, расположенного на минищите. Выходы хвостовой и ножевой матриц соединены с шинными формирователями, кроме того, выходы хвостовой матрицы также соединены с блоком формирования сигнала прерывания и коммутатором. Выходы шинных формирователей, блока формирования сигнала прерывания и коммутатора соединены с входами микроконтроллера, а их дополнительные входы управления связаны с выходами микроконтроллера. Другие выходы микроконтроллера соединены с двумя дешифраторами, выходы одного из которых соединены с ножевой матрицей, а выходы другого - с модулем фонового опроса хвостовой матрицы, выход которого, в свою очередь, соединен с хвостовой матрицей. Другие выходы микроконтроллера соединены с блоком управления оптическим передатчиком, который своим выходом подключен к оптическому передатчику, формирующему сфокусированный лазерный луч в направлении, противоположном направлению движения минищита, и оптически соединенного с фотоприемным устройством, расположенным в исходной точке тоннеля. Выход фотоприемного устройства соединен со вторым входом блока согласования сигналов, а тот в свою очередь вторым выходом и первым входом с электронно-вычислительным комплексом. Также оптический передатчик, расположенный на минищите, кинематически соединен с валом электропривода поворота в вертикальной плоскости и валом электропривода поворота в горизонтальной плоскости, входы и контрольные выходы которых соединены с блоком контроля и управления электроприводами, который, в свою очередь, соединен с микроконтроллером. Дополнительные входы и выходы микроконтроллера соединены с устройством управления механизмами минищита.
Сущность изобретения состоит в том, что введение в систему управления блока управления оптическим задатчиком направления и блока согласования сигналов позволяет осуществить преобразование информации, поступающей от электронно-вычислительного комплекса в виде электрических сигналов, в информацию, закодированную в модулированном лазерном излучении оптического задатчика направления. Введение в систему микроконтроллера, дешифраторов, модуля фонового опроса хвостовой матрицы, шинных формирователей, блока формирования сигнала прерывания и коммутатора позволяет осуществлять определение координат засвеченных фотоэлементов хвостовой и ножевой матриц и минищита в пространстве, а также принимать и обрабатывать информацию, поступающую от оптического задатчика направления в виде модулированного лазерного излучения. Применение блока управления оптическим передатчиком и оптического передатчика позволяет осуществить преобразование информации, подлежащей передаче на электронно-вычислительный комплекс, из электрической формы в модулированное лазерное излучение, а обратное преобразование ее в электрическую форму осуществляется с помощью фотоприемного устройства и блока согласования сигналов. Применение электроприводов, блока контроля и управления электроприводами, а также информации о положении минищита, поступающей от микроконтроллера, позволяет стабилизировать положение оптического передатчика в одном положении. Электронно-вычислительный комплекс позволяет оператору контролировать процесс строительства минитоннеля, а также осуществлять оперативное управлении минищитом.
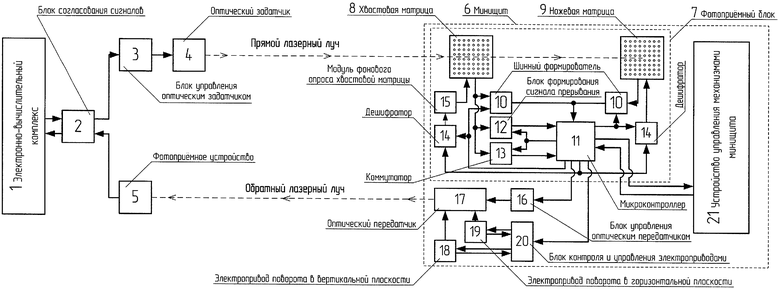
Сущность изобретения поясняется чертежом, на котором дана блочная схема системы контроля положения и управления движением минищита для строительства минитоннелей.
Система контроля положения и управления движением минищита для строительства минитоннелей состоит из электронно-вычислительного комплекса 1, к которому первым входом и вторым выходом подключен блок согласования сигналов 2. К первому выходу данного блока подключен блок управления 3 оптическим задатчиком 4 направления, а ко второму входу фотоприемное устройство 5. На минищите 6 установлена аппаратура, состоящая из фотоприемного блока 7, который включает в себя хвостовую 8 и ножевую 9 матрицы фотоэлементов, соединенные своими выходами с шинными формирователями 10, а те, в свою очередь, выходами и входами управления с микроконтроллером 11. Помимо этого выходы хвостовой матрицы 8 соединены с блоком формирования сигнала прерывания 12 и коммутатором 13, выходы и входы управления которых соединены с микроконтроллером 11. Также фотоприемный блок 7 включает в себя дешифраторы 14, подключенные своими входами к микроконтроллеру 11. Один из дешифраторов 14 выходами подключен к ножевой матрице 9, а второй - к модулю 15 фонового опроса хвостовой матрицы 8. Кроме фотоприемного блока 7 на минищите 6 установлен блок управления 16 оптическим передатчиком 17, электроприводы 18 и 19 поворота оптического передатчика 17 в вертикальной и горизонтальной плоскостях соответственно и кинематически соединенных с оптическим передатчиком 17. Электроприводы 18 и 19 своими входами и информационными выходами соединены с блоком контроля и управления 20 электроприводами. Также на минищите 6 установлено устройство 21 управления механизмами минищита 6, подключенное информационными входами и выходами к микроконтроллеру 11.
Работает вся система следующим образом. Перед началом процесса сооружения минитоннеля производится включение всей аппаратуры, входящей в систему контроля положения и управления движением минищита 6 для строительства минитоннелей. Блок управления 3 оптическим задатчиком 4 направления начинает вырабатывать сигналы, которые поступают на оптический задатчик 4 направления и приводят его в режим генерации постоянного лазерного излучения, направленного в сторону минищита 6. Генерируемый лазерный луч попадает на хвостовую 8 и ножевую 9 матрицы фотоприемного блока 7, тем самым засвечивая на них фоточувствительные элементы, объединенные системой горизонтальных (строки) и вертикальных (столбцы) информационных линий. Микроконтроллер 11 по циклу производит выработку сигналов управления, поступающих на дешифраторы 14, поочередно приводя их в действие. Дешифраторы 14 производят дешифрирование сигналов, поступающих от микроконтроллера 11, и подают их на горизонтальные (строки) информационные линии хвостовой 8 и ножевой 9 матриц. Через горизонтальные информационные линии матриц и засвеченные фоточувствительные элементы сигналы от дешифраторов 14 поступают на вертикальные (столбцы) информационные линии и далее на шинные формирователи 10, активируемые попарно с дешифраторами 14 и предназначенные для мультиплексирования выходных информационных линий хвостовой 8 и ножевой 9 матриц. С шинных формирователей 10 сигналы передаются на входы микроконтроллера 11 и обрабатываются в нем. Зная код (номер сканируемой строки), подаваемый на дешифраторы 14, и анализируя информацию, поступающую с шинных формирователей 10, на предмет появления активного сигнала на линиях, вычисляются координаты засвеченных фоточувствительных элементов и координаты положения минищита 6 в пространстве относительно проектной оси тоннеля. В случае ухода минищита 6 от проектной оси микроконтроллер 11 вырабатывает сигналы управления, которые поступают на устройство управления 21 механизмами минищита 6 для корректировки его пространственного положения. В таком режиме система работает как автоматическая, но иногда необходимо осуществлять дистанционное управление исполнительными механизмами минищита 6 или производить обмен информацией с аппаратурой, установленной на минищите 6. Для этого в системе предусмотрена возможность оперативного обмена информацией посредством лазерного луча. Оператор, находясь за пультом электронно-вычислительного комплекса 1, в диалоговом режиме осуществляет выбор тех или иных команд управления, которые должны привести к определенным событиям на минищите 6. Электронно-вычислительный комплекс 1 осуществляет выработку сигналов управления в соответствии с выбранными командами, которые поступают на блок согласования сигналов 2 для преобразования в стандартную цифровую форму и далее на блок управления 3 оптическим задатчиком 4 направления, который в соответствии с поступающими сигналами вырабатывает сигналы управления оптическим задатчиком 4 направления для генерирования им модулированного лазерного излучения. Как только модулированный луч попадает на хвостовую матрицу 8, блок формирования сигнала прерывания 12 вырабатывает сигнал прерывания, который переводит микроконтроллер 11 в режим подготовки к приему информации. Микроконтроллер 11 производит сканирование хвостовой матрицы 8 и определяет координаты засвеченных фоточувствительных элементов, далее он вырабатывает сигналы, настраивающие коммутатор 13 на прием и передачу информации с засвеченного фоточувствительного элемента на вход микроконтроллера 11. Далее он ожидает момент начала приема информации в последовательном формате и осуществляет ее прием. По завершении приема информации, микроконтроллер 11 производит ее декодирование и выработку тех или иных сигналов управления исполнительными механизмами минищита 6 и переходит в режим передачи служебной информации на пульт оператора. Для этого перед началом передачи служебной информации микроконтроллер 11 передает информацию об углах между осью минищита 6 и проектной осью тоннеля в вертикальной и горизонтальной плоскостях на блок контроля и управления 20 электроприводами 18 и 19 для осуществления, при необходимости, стабилизации положения оптического передатчика 17. После этого он осуществляет выработку сигналов по последовательному каналу связи. Данные сигналы поступают на блок управления 16 оптическим передатчиком 17 и далее на оптический передатчик 17 для генерации им модулированного лазерного излучения в сторону, противоположную направлению движения минищита 6. Модулированный луч попадает на фотоприемное устройство 5 и преобразуется в электрические импульсы, которые поступают на блок согласовании сигналов 2 и преобразуются в цифровую форму, приемлемую для электронно-вычислительного комплекса 1. Полученный нормализованный сигнал поступает в электронно-вычислительный комплекс 1, где и обрабатывается по определенному алгоритму. После завершения передачи информации на пульт оператора микроконтроллер 11 возвращается в режим сканирования хвостовой 8 и ножевой 9 матриц для определения пространственных координат минищита 6 и стабилизации его положения.
Для корректного срабатывания блока формирования сигнала прерывания 12 в систему введен блок 15 фонового опроса хвостовой матрицы 8, позволяющий отреагировать на появление модулированного луча вне зависимости от того, какую из матриц хвостовую 8 или ножевую 9 в данный момент времени сканирует микроконтроллер 11.
Во время движения минищита 6 может происходить отклонение его продольной оси от проектной оси тоннеля, и в этом случае оптический передатчик 17 также будет изменять свое положение в пространстве, что не допустимо. Для разрешения данной ситуации оптический передатчик 17 монтируется на специальной платформе, горизонтальное и вертикальное положение которой обеспечивается электроприводами 18 и 19. Управление данными электроприводами осуществляется блоком контроля и управления 20 электроприводами 18 и 19 по информации, поступающей от микроконтроллера 11.
Создание этой системы позволяет: уменьшить габаритные размеры аппаратуры за счет применения современной элементной базы; определять пространственные координаты минищита относительно проектной оси строительства тоннеля с высокой точностью; осуществлять оперативную связь с аппаратурой, установленной на минищите, посредством лазерного луча с высокой помехозащищенностью и повышенным быстродействием.
В лабораториях ГОУ ВПО Южно-Российского государственного технического университета (Новочеркасский политехнический институт) и Общества с ограниченной ответственностью научно-производственного предприятия «ВНИКО» создан макетный образец предлагаемой системы контроля положения и управления движением минищита для строительства минитоннелей, проведены лабораторные испытания, подтвердившие работоспособность, полезность этой системы, высокий изобретательский уровень.
Проведенные патентно-информационные исследования говорят о новизне разработанной системы.
На основании вышеизложенного считаем, что предлагаемая нами «Система контроля положения и управления движением минищита для строительства минитоннелей» может быть защищена патентом Российской Федерации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система позиционирования проходческого комплекса в пространстве | 2019 |
|
RU2733256C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ИЗБИРАТЕЛЬНОГО ДЕЙСТВИЯ ГОРНОПРОХОДЧЕСКОГО КОМПЛЕКСА | 2007 |
|
RU2360111C2 |
| Двухсистемная управляемая ракета в транспортно-пусковом контейнере | 2023 |
|
RU2814065C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| Устройство для определенияпОлОжЕНия пРОКАТА | 1979 |
|
SU801921A1 |
| Система автоматического ведения горнопроходческого щита | 1983 |
|
SU1122823A1 |
| Система управления движением горной машины | 1975 |
|
SU899931A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ СТАНКОМ | 2009 |
|
RU2420776C1 |
| АЭРОДРОМНЫЙ АВТОМАТИЗИРОВАННЫЙ КОМПЛЕКС МОНИТОРИНГА, УПРАВЛЕНИЯ И ДЕМОНСТРАЦИИ ПОЛЕТОВ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2010 |
|
RU2426074C1 |
| КОМБИНИРОВАННЫЙ ОПТИКО-ЭЛЕКТРОННЫЙ ПРИБОР | 2011 |
|
RU2497062C2 |
Изобретение касается автоматического и автоматизированного управления направленным движением тоннелепроходческих машин и щитов. Техническим результатом является определение пространственных координат минищита с высокой точностью и позволяющей осуществлять оперативную связь с аппаратурой, установленной на минищите посредством лазерного луча, придание этой системе помехозащищенности и повышенного быстродействия. Система состоит из оптического задатчика направления, фотоприемного блока, и в нее дополнительно введены: блок управления оптическим задатчиком, блок согласования сигналов, микроконтроллер, дешифратор, модуль фонового опроса матрицы, шинные формирователи, блок формирования сигнала прерывания, коммутатор, электроприводы, блок контроля и управления электроприводами, блок управления оптическим передатчиком, оптический передатчик, фотоприемное устройство. Все эти элементы взаимосвязаны. 1 ил.
Система контроля положения и управления движением мини-щита для строительства мини-тоннелей, содержащая оптический задатчик направления, фотоприемник, отличающаяся тем, что она снабжена блоком управления оптическим задатчиком направления, вход которого подключен к первому выходу блока согласования сигналов, а выход - к оптическому задатчику направления, формирующему сфокусированный лазерный луч, поступающий на хвостовую и ножевую матрицы фотоприемного блока, а их выходы соединены с шинными формирователями, выходы которых соединены с микроконтроллером, также выходы хвостовой матрицы соединены с блоком формирования сигнала прерывания и коммутатором, выходы которых соединены с микроконтроллером, выходы микроконтроллера соединены с двумя дешифраторами, выход одного из которых соединен с ножевой матрицей, а выход другого - с модулем фонового опроса хвостовой матрицы, выход которого, в свою очередь, соединен с хвостовой матрицей, при этом другие выходы микроконтроллера соединены с блоком управления оптическим передатчиком, выход которого подключен к оптическому передатчику, формирующему сфокусированный лазерный луч в направлении, противоположном направлению движения мини-щита, и оптически соединенному с фотоприемным устройством, выход которого соединен со вторым входом блока согласования сигналов, а тот, в свою очередь, вторым выходом и первым входом - с электронно-вычислительным комплексом, при этом оптический передатчик кинематически соединен с валом электропривода поворота в вертикальной плоскости и валом электропривода поворота в горизонтальной плоскости, входы и контрольные выходы которых соединены с блоком контроля и управления электроприводами, который, в свою очередь, соединен с микроконтроллером, дополнительные входы и выходы микроконтроллера соединены с устройством управления механизмами мини-щита.
| Система управления движением горной машины | 1974 |
|
SU682647A1 |
| Система автоматического управления движением коллекторного проходческого щита | 1988 |
|
SU1599537A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ МЕХАНИЗМАМИ ПЕРЕДВИЖЕНИЯ ЩИТА И ВОЗВЕДЕНИЯ КРЕПИ ТОННЕЛЕПРОХОДЧЕСКОГО КОМПЛЕКСА | 2001 |
|
RU2206751C1 |
| СПОСОБ УПРАВЛЕНИЯ ГОРНОЙ МАШИНОЙ | 1988 |
|
RU2041353C1 |
| GB 1383756 A, 12.02.1974. | |||

