Изобретение относится к области средств для технической разведки (далее - TP), обследования и оценки инфраструктуры железнодорожного транспорта в условиях чрезвычайных ситуаций, террористических актов, в том числе и при воздействии потенциального противника.
Для повышения эффективности получения данных при разрушении объектов инфраструктуры железнодорожного транспорта в условиях чрезвычайных ситуаций, проведение TP предусматривает два этапа: на первом - воздушная TP, на втором - наземная ТР. Наземная TP проводится с учетом данных воздушной TP и заключается в непосредственном обследовании разрушенных объектов инфраструктуры железнодорожного транспорта.
Известен целый ряд устройств для обследования и оценки инфраструктуры железнодорожного транспорта, описанных в технической и патентной литературе. Однако, в основном, все они предназначены для контроля одного-двух параметров или не в полной мере соответствуют требованиям, предъявляемым к современной TP объектов инфраструктуры железнодорожного транспорта.
Известна, например, путеизмерительная тележка [1], содержащая раму, опирающуюся на ходовое устройство с четырьмя роликами, закрепленную на раме тяговую рукоятку, а также смонтированную на раме контрольно-измерительную систему, включающую мультиантенную систему навигации, датчики измерения уровня колеи железнодорожного пути (бесконтактные сканеры верхних и боковых внутренних граней головок рельсов), бортовой компьютер и референцные станции дополнительно оснащены устройствами приема/передачи информации GSM/GPRS, 3G, 4G. Недостатком является неосуществимость проведения воздушной TP, невозможность поиска опасных и посторонних предметов на железной дороге, отсутствие средств для обследования напольных устройств СЦБ и связи, а так же ограниченные возможности выполнения задач TP в условиях чрезвычайной ситуациях, например на зараженной территории.
Известен мобильный комплекс для обследования железных дорог (далее - МКОЖД) [2], включающий в себя беспилотный летательный аппарат (далее - БЛА) «Тахион», позволяющий осуществить поиск на железной дороге разрывов контактной сети, ее нагрев, и повреждений прилегающего оборудования с использованием средств видеонаблюдения, запуск осуществляется с пневматической катапульты с крыши УАЗа «Патриот» на комбинированном ходу, также включены приемник и передатчик информации от БЛА к оператору, съемные крепежи для установки пневматической катапульты, которые монтируется на крышу УАЗа «Патриот», с возможностью изменения угла запуска БЛА. МКОЖД имеет возможность следования за БЛА по железнодорожным путям, таким образом, радиус действия данного комплекса увеличивается за счет его перемещения не только к месту запуска, но и передвижению в ходе работы БЛА, а также имеется возможность погрузки БЛА на транспортное средство, подзарядки и запуска без разбора и сбора компонентов. МКОЖД позволяет осуществлять воздушную и наземную TP объекта инфраструктуры железнодорожного транспорта. Недостатком МКОЖД является отсутствие поиска опасных и посторонних предметов на железной дороге, а также отсутствие в комплексе средств для обследования напольных устройств СЦБ и связи.
Известно техническое решение, БЛА для поиска опасных и посторонних предметов на железной дороге [3], представляющий собой конструкцию, состоящую из основания и прикрепленных штанг, на концах которых закреплены приборы поиска опасных и посторонних предметов: камер высокого разрешения, магнитометра, лазерного детектора, и позволяющий осуществлять поиск опасных предметов непосредственно на верхнем строении пути и в теле насыпи. Недостатком технического решения является невозможность осуществлять наземную TP объектов инфраструктуры железнодорожного транспорта (геометрия пути, износ рельс, радиохимическое наблюдение, профилометрия стрелочных переводов и переездов и т.п.), в том числе обследование напольных устройств СЦБ и связи.
Известен мобильный диагностический комплекс (далее - МДК) автоматизированной оценки состояния объектов инфраструктуры железнодорожного транспорта [4], содержащий бортовой контрольно-вычислительный комплекс и комплекс контрольно-измерительных систем (далее - КИС), снабженный системой контроля и оценки геометрических параметров пути, системой бесконтактного высокоскоростного контроля геометрических параметров рельсов, системой высокоскоростной дефектоскопии рельсов, системой скоростного визуального обнаружения дефектов пути, системой контроля динамики движения поезда, системой скоростного георадиолокационного контроля, системой скоростного контроля габаритов приближения строений, системой скоростного контроля состояния систем железнодорожной автоматики и телемеханики, системой скоростного контроля состояния контактной сети, системой контроля параметров аналоговой радиосвязи, системой контроля параметров цифровой радиосвязи. МДК предназначен для диагностики, анализа и прогнозирования состояния таких объектов пути, как рельсы, шпалы, контактные провода, мосты, туннели и др. Техническое устройство отражает состояние геометрии рельсового пути, износа рельсов, контроль дефектов рельсов, условия эксплуатации - скорости передвижения поездов и других рельсовых транспортных средств, динамические нагрузки, нагрузки на оси колес и т.д., а также характеристики дорожных схем, расположение поворотов, кривых и прямых участков рельсового пути, местонахождение откосов и пр. МДК наиболее полно отражает задачи комплексной диагностики и контроля верхнего строения пути и элементов инфраструктуры железнодорожного транспорта и имеет ряд преимуществ, таких как наличие системы скоростного контроля состояния контактной сети, контроля состояния систем железнодорожной автоматики и телемеханики, систем контроля параметров аналоговой и цифровой радиосвязи, а также различных систем оценки некоторых параметров безопасности в условиях реальной нагрузки на рельсы. В отличие от дефектоскопических автомотрис, МДК способен работать длительное время, имея в своем составе вагоны для персонала, т.е. обладает достаточной автономностью. Аппаратура, установленная на МДК, рассчитана на работу при скоростях движения до 250 км/час (величина измеряемой скорости движения комплекса может достигать 300 км/час). Недостатком МДК является отсутствие БЛА для проведения воздушной TP, а так же ограниченные возможности выполнения задач TP в условиях чрезвычайной ситуации.
Известен многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры (далее - МАРК) [5], который включает стационарную часть, состоящую из базовой станции и одной и более эвакуационных станций, а так же мобильные части (мониторы и платформы), выполненные в виде подвижных единиц, представляющих собой рельсовые транспортные средства и обеспечивающих мониторинг инфраструктуры железнодорожного транспорта. В составе МАРК имеется комплекс «Стрекоза» с БЛА, который значительно расширяет границы и уменьшает время проведения воздушного обследования одновременно с перемещением монитора и ограничивается лишь скоростью полета самого дрона. Взлет и посадка БЛА на зарядную площадку с посадочным сенсором и световыми сигналами возможна при движении монитора. В зависимости от поставленных задач, БЛА может оснащаться различными средствами TP, представляя собой интегрированную систему с лидаром, видеокомплексом мультиспектральной TP, георадаром и нелинейным радиолокатором, позволяющим определять СВУ с высоты не менее 30 метров.
Известен мобильный измерительный комплекс автоматики и радиосвязи МИКАР [6, 7], содержащий, по меньшей мере, один компьютер и комплекс КИС, включающих: систему измерения параметров напольных устройств автоматической локомотивной сигнализации, систему измерения параметров напольных устройств системы автоматического управления торможением поездов, систему измерения параметров поездной радиосвязи, систему измерения координат пути, систему контроля напольных камер системы контроля технического состояния железнодорожного подвижного состава, систему регистрации изолирующих стыков рельсовых цепей, систему регистрации питающих концов тональных рельсовых цепей, которые связанны с компьютером через диспетчер-коммутатор связи. МИКАР размещается в специализированном вагоне-лаборатории или аналогичной подвижной единице и применяется для периодической проверки состояния устройств СЦБ и связи путем измерения, контроля и регистрации параметров напольных устройств СЦБ, поездной радиосвязи и технического состояния железнодорожного подвижного состава на ходу поезда.
Основными недостатками МДК, МАРК, МИКАР и МКОЖД сложность выбора технологических «окон» мониторинга и контроля в условиях плотного графика движения поездов, так как они являются подвижной единицей или полноценными железнодорожными составом, состоящим из дефектоскопического вагона, нескольких вагонов для персонала и локомотива. В тоже время при разрушении искусственных сооружений (железнодорожного моста через водные преграды, тоннели и т.п.), являющихся барьерными местами, отсутствует возможность проведения полноценной и качественной TP объекта инфраструктуры железнодорожного транспорта.
Наиболее близким аналогом к заявляемому изобретению, является беспилотник Staaker BG-300 [8], способный ездить по путям и быстро взлетать с них, чтобы пропустить приближающийся поезд. Дрон оснащен топливным элементом и четырьмя колесами, при помощи которых он может ехать по железной дороге со средней скоростью около 20 километров в час. Запас хода дрона составляет до 200 километров. Для оценки состояния путей Staaker BG-300 использует камеры и различные датчики, передавая данные оператору. Также аппарат может смазывать стрелки, если это необходимо. Дрон в автономном режиме взлетает с железнодорожного полотна, чтобы переместиться на соседний путь или пропустить приближающийся поезд. Staaker BG-300 предназначен для оперативного обследования железнодорожных путей в сложных погодных условиях и в обстановке плотного графика движения поездов. Недостатком данного устройства является отсутствие возможности проведения воздушной TP без нагрузки (путеизмерительной тележки с комплексом КИС), а также отсутствие поиска опасных и посторонних предметов на железной дороге.
Представленные средства для TP, обследования и оценки инфраструктуры железнодорожного транспорта, несомненно, обладают своими специфическими особенностями и имеют широкий спектр возможностей. Тем не менее, указанные выше недостатки ограничивают их функциональные потенциалы в условиях чрезвычайных ситуаций, террористической опасности и воздействии потенциального противника.
Для компенсации указанных недостатков предлагается использовать беспилотный летательный измерительный комплекс (далее - БЛИК), который представляет собой самоходно-летательное путеизмерительное устройство, которое выполняет наземную и воздушную TP с помощью фото- и видеоаппаратуры, средств поиска мин, фугасов и взрывоопасных предметов, съемно-навесного блочно-модульного комплекса КИС (далее - БМ-КИС).
Технический результат предлагаемого изобретения заключается в повышении эффективности TP, обследования и оценки инфраструктуры железнодорожного транспорта путем расширения функциональных возможностей за счет проведения воздушной TP без путеизмерительной тележки с модульным комплексом КИС, а также комбинацией съемно-навесных БМ-КИС, предназначенных для соответствующих целей.
Сущность предлагаемого изобретения поясняется на фиг. 1-5, где:
поз. 1 - конструктив путеизмерительной тележки;
поз. 2 - платформа путеизмерительной тележки;
поз. 3 - движитель;
поз. 4 - колеса с армированной лентой;
поз. 5 - аппаратно-программный комплекс (далее - АПК);
поз. 6 - энергопитающая установка (далее - ЭПУ);
поз. 7 - самозакрывающееся сцепное крепление (далее - ССК);
поз. 8 - унифицированная площадка для монтажа БМ-КИС;
поз. 9 - эксцентриковый натяжной замок-защелка;
поз. 10 - съемно-навесные БМ-КИС;
поз. 11 - съемные блок-модули поиска мин, фугасов и взрывоопасных устройств (далее - БМ-ВУ);
поз. 12 - винтовые стяжки;
поз. 13 - корпус БЛА;
поз. 14 - штанга БЛА;
поз. 15 - моторы с электронным регулятором скорости;
поз. 16 - пропеллеры;
поз. 17 - интегрированная система мультиспектральной разведки;
поз. 18 - осветительный фонарь;
поз. 19 - компактная метеостанция;
поз. 20 - модуль радиоуправления со спутниковой навигацией ГЛОНАСС/GPS;
поз. 21 - бортовая (полетная) батарея питания;
поз. 22 - посадочные шасси;
поз. 23 - площадка для БЛА;
поз. 24 - универсальный CAN-разъем;
поз. 25 - ось петли на посадочных шасси БЛА;
поз. 26 - крюк ССК;
поз. 27 - штифт крюка ССК;
поз. 28 - направляющие ССК;
поз. 29 - пружина ССК;
поз. 30 - электромагнит ССК.
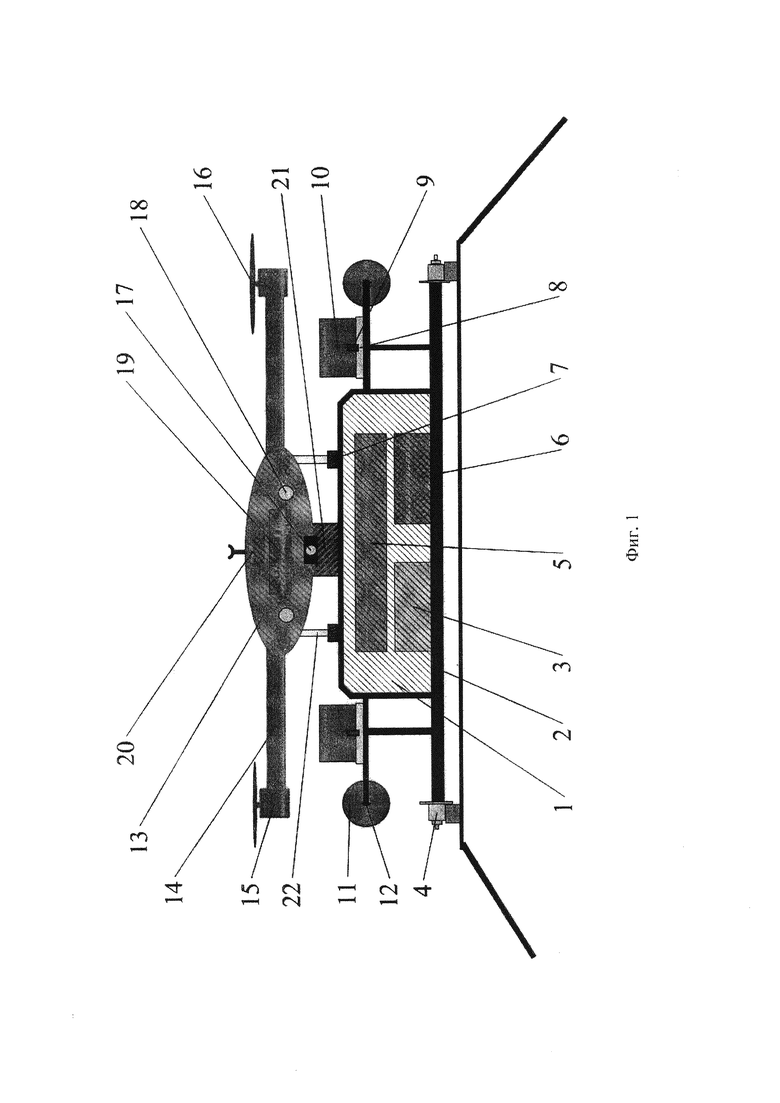
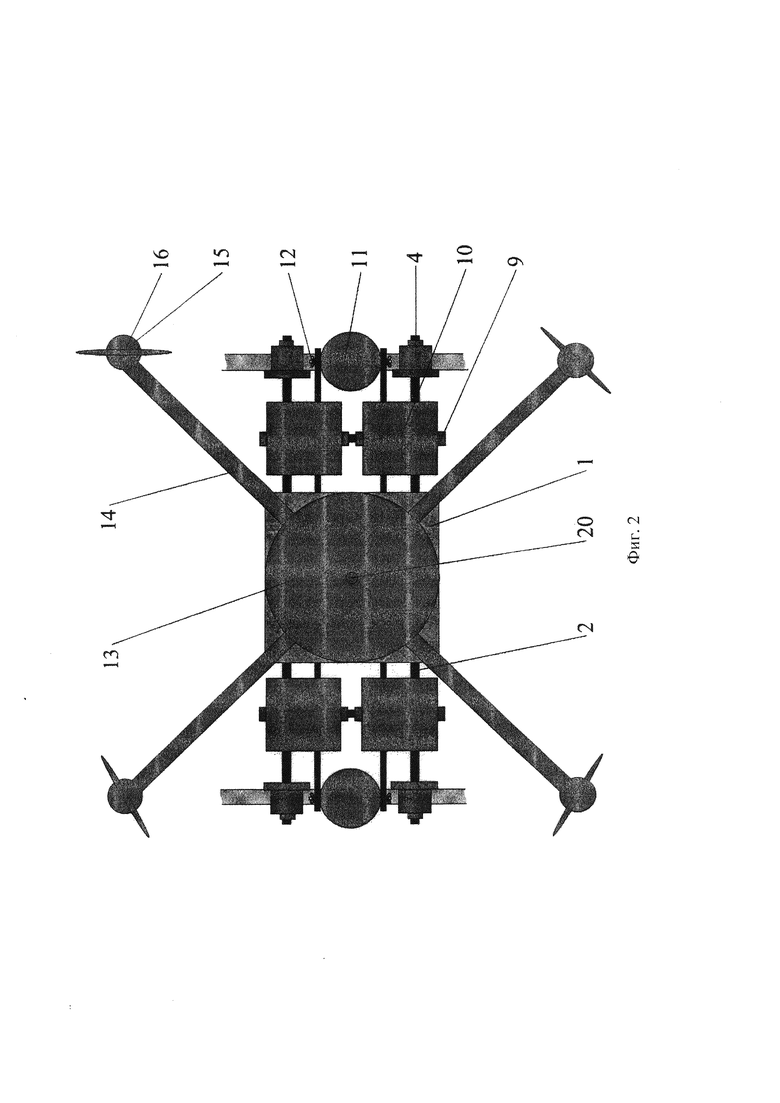
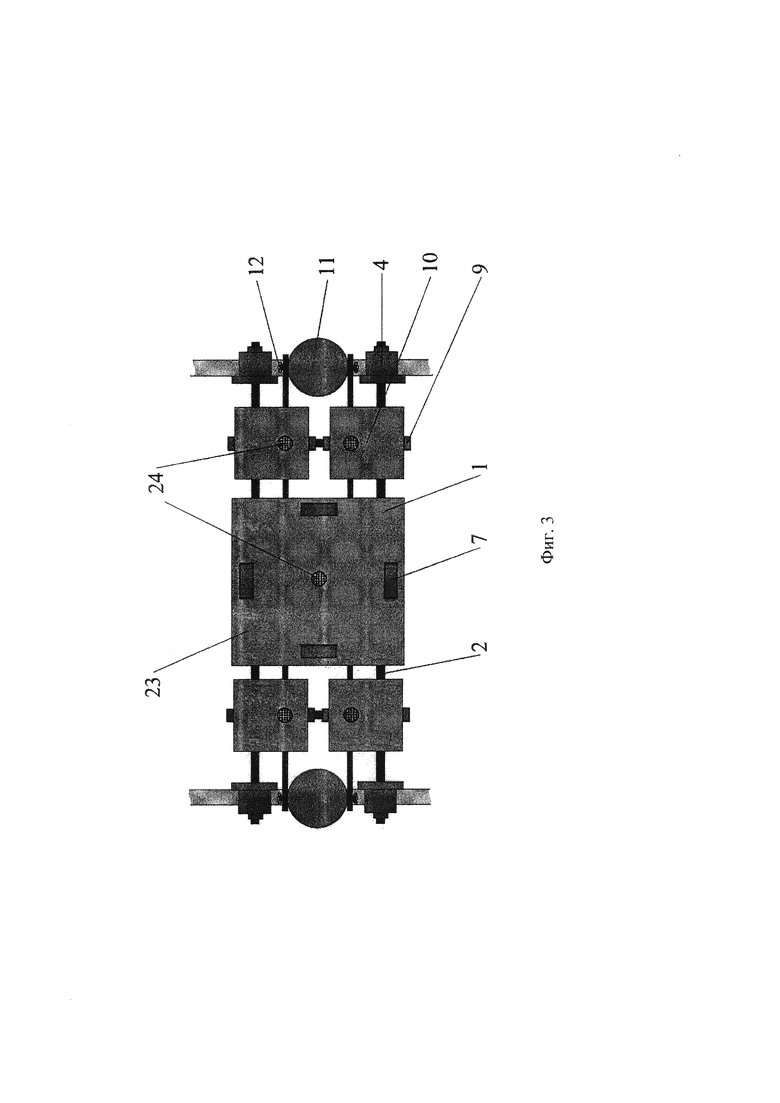
В основе БЛИК находиться путеизмерительная тележка (фиг. 1-3) предназначенная для выполнения функций наземной TP включающая: конструктив (поз. 1) и платформу путеизмерительной тележки (поз. 2) выполненные из композитного материала или углеволокна, движитель (поз. З) для езды по путям с помощью колес с армированной лентой (поз. 4), управляемой через АПК (поз. 5) содержащий элементы управления и средства приема/обработки/передачи данных, ЭПУ (поз. 6) состоящую из аккумулятора, зарядного устройства и средств распределения энергии, площадки для БЛА (поз. 23) по четырем сторонам периметра которой расположены ССК (поз. 7), а по центру универсальный CAN-разъем (поз. 24) для коммутации БЛА с путеизмерительной тележкой, четырех унифицированных площадок (поз. 8) для монтажа БМ-КИС (поз. 10) с использованием эксцентриковых натяжных замков-защелок (поз. 9) и двух БМ-ВУ (поз. 11) прикрепленных с помощью винтовых стяжек (поз. 12).
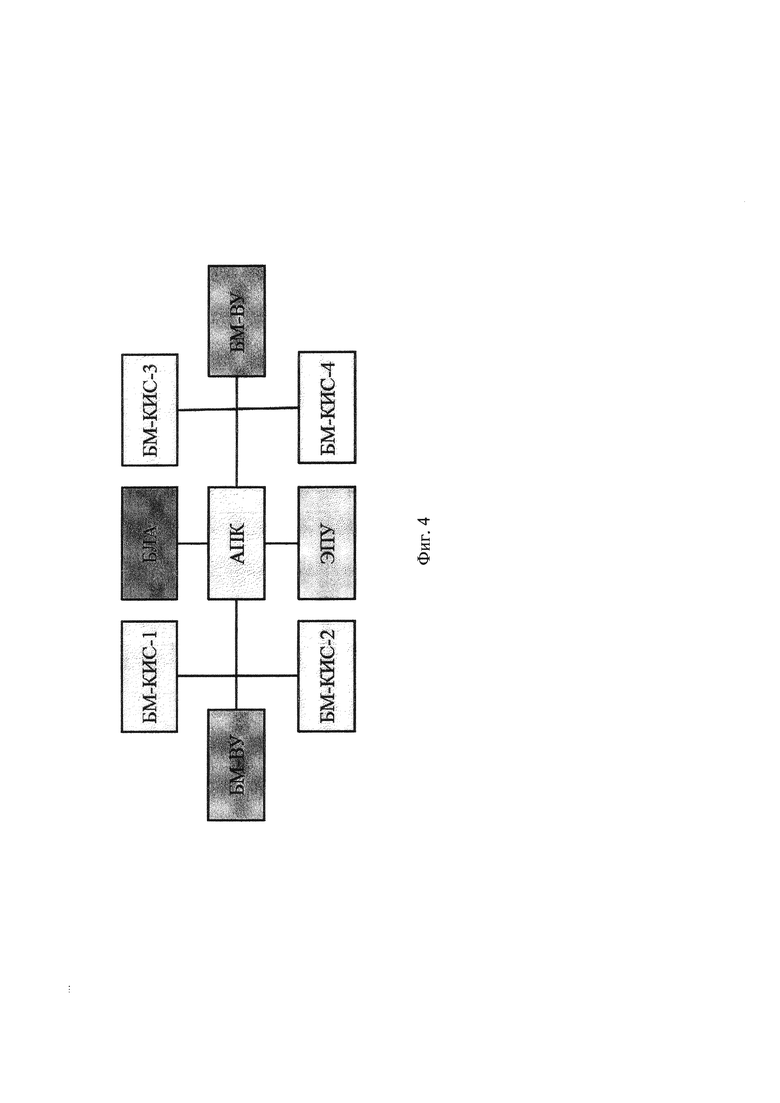
Съемно-навесной блочно-модульный комплекс КИС состоит из монтируемых на путеизмерительную тележку с помощью эксцентриковых натяжных замков-защелок (поз. 9) съемно-навесных БМ-КИС (поз. 10), предназначенных для соответствующих целей: БМ-КИС-1 (ультразвуковой контроль железнодорожных путей); БМ-КИС-2 (датчики для измерения и контроля параметров напольных устройств СЦБ и связи); БМ-КИС-3 (устройства для обследования искусственных сооружений (мосты, тоннели, трубы и т.п.); БМ-КИС-4 (экологический мониторинг окружающей местности, включающий радиационную, химическую и биологическую разведку) и т.п. Блочно-модульная система создает возможность добавление новых БМ-КИС, для расширения функционального потенциала БЛИК.
Для функций воздушной TP в БЛИК введен БЛА (фиг. 1-2), включающий: корпус БЛА (поз. 13) с четырьмя прикрепленными штангами (поз. 14) на концах которых установлены моторы (поз. 15) с пропеллерами (поз. 16) и электронными регуляторами скорости. Корпус БЛА оснащен интегрированной системой мультиспектральной разведки (поз. 17) с лидаром, видеокомплексом, 3D сканером, георадаром, нелинейным радиолокатором для определения СВУ с высоты не менее 30 метров и средствами определения и обнаружения живой силы и транспортных средств по тепловому излучению, четырьмя осветительными фонарями (поз. 18) для работы в темное время суток, компактной метеостанцией (поз. 19), модулем радиоуправления со спутниковой навигацией ГЛОНАСС/GPS с приемопередающим блоком и антенной (поз. 20). В нижней части корпуса БЛА расположена бортовая (полетная) батарея питания (поз. 21) для снабжения энергией во время полета без путеизмерительной тележки. Для обеспечения возможности садиться на путеизмерительную тележку и переносить ее с/на пути предлагается использовать посадочные шасси (поз. 22) с ССК (поз. 7).
АПК, ЭПУ, БМ-КИС, БМ-ВУ и БЛА объединены в сеть с использованием стандарта CAN (Controller Area Network) шина, для этого на площадке для БЛА (поз. 23) и четырех унифицированных площадках для монтажа БМ-КИС (поз. 8) предусмотрены CAN-разъемы (поз. 24). Топология CAN шины представлена на (фиг. 4).
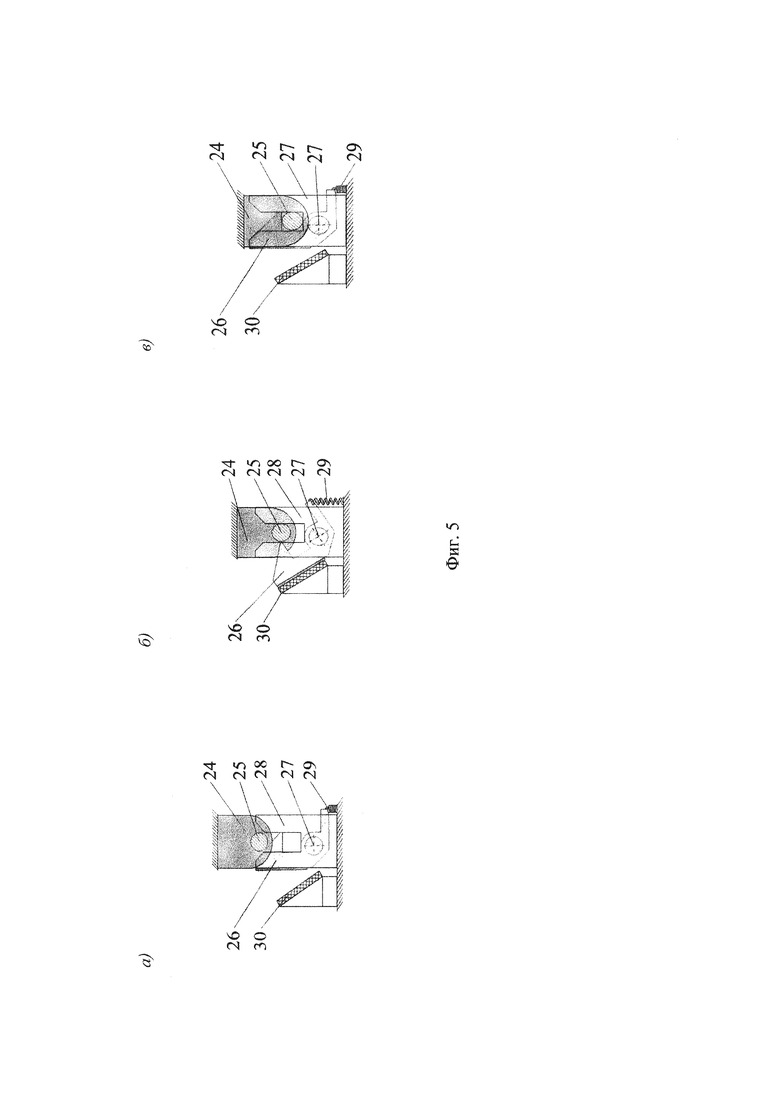
Существенным признаком, отличающим БЛИК от аналога [8] является наличие ССК.
Принцип действия ССК представлен на (фиг. 5) и заключается в следующем: при посадке (см. фиг. 5, а) петля на посадочных шасси БЛА (поз. 22) своей осью (поз. 25) давит на крюк (поз. 26) ССК, который проворачиваясь на штифте (поз. 27) отклоняется и ось (поз. 25) петли проходит вниз по направляющей (поз. 28), отжимая крюк (поз. 26) (см. фиг. 5, б). После того, как ось (поз. 25) петли окажется ниже края крюка (поз. 26) он начнет возвращаться в исходное положение под действием пружины (поз. 29). Когда ось (поз. 25) петли упрется в низ направляющей (поз. 28) крюк (поз. 26) полностью вернется в исходное положение и зафиксирует ось (поз. 25) петли посадочных шасси БЛА. Таким образом, при посадке БЛА на путеизмерительную тележку, петли посадочных шасси БЛА войдут в ССК, которые в свою очередь автоматически зафиксируют их (см. фиг. 5, в). Надежность фиксации достигается усилием пружины (поз. 29) и несоосностью по вертикали центров оси (поз. 25) петли и штифта (поз. 27) крюка (поз. 26). Для расцепления БЛА и путеизмерительной тележки используются электромагниты (поз. 30) на которые подается электропитание, и они притягивают к себе крюки (поз. 26), преодолевая усилие пружин (поз. 29), оси (поз. 25) освобождаются и при взлете БЛА петли выходят вверх по направляющим (поз. 28). Расположение ССК (поз. 7) по четырем сторонам периметра площадки (поз. 23) делает возможным точно фиксировать БЛА, что даст возможность расположить универсальный CAN-разъем (поз. 24) для подключения питания БЛА и других интерфейсов. Применение предложенного ССК позволит снизить потребление электроэнергии, так как, во-первых при выполнении воздушной TP без путеизмерительной тележки, уменьшается полезная нагрузка на БЛА, во-вторых включение электромагнитов необходимо только в момент взлета.
В патентной и технической литературе такая совокупность технических решений не обнаружена.
Таким образом, БЛИК является самоходно-летательным путеизмерительным устройством для проведения как воздушной, так и наземной TP, в котором учтены и устранены недостатки приведенных прототипов [1-7], реализация технических предложений приведенных выше позволит получить рациональное средство для TP объектов инфраструктуры железнодорожного транспорта, дополняющее и расширяющие границы потенциалов вышеуказанных технических решений в условиях чрезвычайных ситуаций.
Список использованных источников
1. Патент на полезную модель №99758 U1 Российская Федерация, МПК В61К 9/08. Путеизмерительная тележка: №2010123722/11: заявл. 07.06.2010: опубл. 27.11.2010 / О.А. Андрианов, С.Ю. Дорошенко, Т. Ю. Дубинко [и др.]. - EDN JADLQT.
2. Патент №2759363 С1 Российская Федерация, МПК В61К 9/00, G01R 31/00, Е01 В 35/00. Мобильный комплекс для обследования железных дорог: №2021100295: заявл. 11.01.2021: опубл. 12.11.2021 / А.А. Сергеев, Р.A. Кочанов, М.А. Котов, В.А. Ломов; заявитель Федеральное государственное казенное военное образовательное учреждение высшего образования "Военная академия материально-технического обеспечения имени генерала армии А.В. Хрулева" Министерства обороны Российской Федерации. - EDN CFLTBC.
3. Патент на полезную модель №209611 U1 Российская Федерация, МПК В64С 39/02, G01V 3/16, F41H 11/12. Беспилотный летательный аппарат для поиска опасных и посторонних предметов на железной дороге: №2021134412: заявл. 23.11.2021: опубл. 17.03.2022 // А.С. Радько, А.А. Сергеев, B.А. Ломов [и др.]; заявитель Федеральное государственное казенное военное образовательное учреждение высшего образования "Военная академия материально-технического обеспечения имени генерала армии А.В. Хрулева", Министерства обороны Российской Федерации. - EDN GPDSTR.
4. Патент №2438903 С2 Российская Федерация, МПК В61К 9/08. Мобильный диагностический комплекс: №2009111204/11: заявл. 27.03.2009: опубл. 10.01.2012 / В.Ф. Тарабрин, М.В. Тарабрин, Е.В. Юрченко [и др.]; заявитель Закрытое акционерное общество "Фирма ТВЕМА". - EDN ОЕАРНН.
5. Патент №2733907 С1 Российская Федерация, МПК В61К 9/08, Е01 В 35/00. Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры: №2020105715: заявл. 06.02.2020: опубл. 08.10.2020 / А.Г. Логинов. - EDN SRZCLD.
6. Сайт Мобильный измерительный комплекс автоматики и радиосвязи (МИКАР) // НИИ "Уралжелдоравтоматика" [Электронный ресурс] - Режим доступа. - URL: http://micar.ru/ (свободный, дата обращения 15.04.2022).
7. Патент на полезную модель №130281 U1 Российская Федерация, МПК В61К 9/08. Мобильный измерительный комплекс автоматики и радиосвязи (МИКАР): №2013111383/11: заявл. 13.03.2013: опубл. 20.07.2013 / В.Ф. Трепшин, Ю.А. Швидкий; заявитель Общество с ограниченной ответственностью "УРАЛЖЕЛДОРАВТОМАТИКА". - EDN UICIEP.
8. В Норвегии создан дрон для инспекции железнодорожных путей // Сайт Nordic Unmanned [Электронный ресурс] - Режим доступа. - URL: https://nordicunmamed.com/products/unmanned-systems-drones/staaker-bg300/ (свободный, дата обращения 15.04.2022).
| название | год | авторы | номер документа |
|---|---|---|---|
| МОДУЛЬНЫЙ ВОССТАНОВИТЕЛЬНЫЙ ПУНКТ СИГНАЛИЗАЦИИ, ЦЕНТРАЛИЗАЦИИ И БЛОКИРОВКИ | 2019 |
|
RU2747520C1 |
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| Мобильный комплекс для обследования железных дорог | 2021 |
|
RU2759363C1 |
| МОБИЛЬНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2009 |
|
RU2438903C2 |
| Модульный восстановительный пункт регулирования движения поездов | 2022 |
|
RU2790210C1 |
| СПОСОБ ОБНАРУЖЕНИЯ МОРСКИХ ЦЕЛЕЙ | 2013 |
|
RU2554640C2 |
| СПОСОБ ТЕКУЩЕГО СОДЕРЖАНИЯ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНЫХ ДОРОГ С ИСПОЛЬЗОВАНИЕМ ЦИФРОВОЙ МОДЕЛИ ПУТИ | 2011 |
|
RU2466235C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| Система многопараметрического мониторинга района техногенной аварии | 2024 |
|
RU2840313C1 |
| Система контроля готовности фронта к проведению машинизированной выправки железнодорожного пути | 2022 |
|
RU2793867C1 |
Беспилотный летательный измерительный комплекс для проведения наземной и воздушной технической разведки содержит путеизмерительную тележку, аппаратно-программный комплекс, энергопитающую установку, съемно-навесной блочно-модульный комплекс контрольно-измерительных систем и беспилотный летательный аппарат с посадочными шасси, включающего интегрированную систему мультиспектральной разведки. Путеизмерительная тележка содержит конструктив с платформой, выполненной из композитного материала, площадку для беспилотного летательного аппарата с самозакрывающимися сцепными креплениями. Обеспечивается повышение эффективности TP, обследования и оценки инфраструктуры железнодорожного транспорта. 5 ил.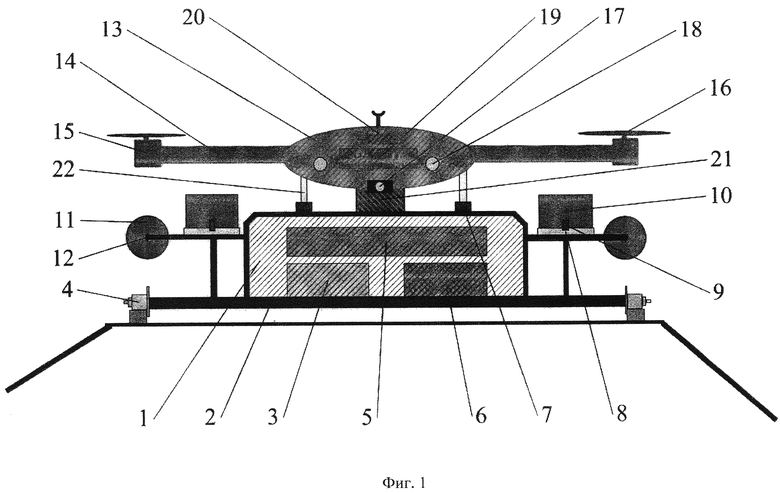
Беспилотный летательный измерительный комплекс для проведения наземной и воздушной технической разведки, содержащий путеизмерительную тележку, включающую конструктив с платформой, выполненной из композитного материала или углеволокна, движитель, аппаратно-программный комплекс, энергопитающую установку, съемно-навесной блочно-модульный комплекс контрольно-измерительных систем и беспилотный летательный аппарат с посадочными шасси, включающего интегрированную систему мультиспектральной разведки, отличающийся тем, что в путеизмерительную тележку введена площадка для беспилотного летательного аппарата, содержащая самозакрывающиеся сцепные крепления.
| Многофункциональный автономный роботизированный комплекс диагностики и контроля верхнего строения пути и элементов железнодорожной инфраструктуры | 2020 |
|
RU2733907C1 |
| Р. И. Ц И. И. Жилевич, А. С. Касаткин, Г. И. Мицевичус, Э. А. ЛГ. 3. Рейцман, В. X. Сас, А. С. Таурайтис, Г. Л. ТрапезАикЖ^^^Пи'чЕСНДЯJL^y^TUiiluG- VdHjpHMac,П. А. Халезов, В. Г. Чепенко, Т. В. Чепенко, И. С. Uliи Д. П. ЛапенисВСЕСОКЬЛДЯ12^''^«'^eg^bJi'-iJ' | 0 |
|
SU199157A1 |
| US 11022982 B2, 01.06.2021 | |||
| CN 111605578 A, 01.09.2020 | |||
| WO 2020055930 A1, 19.03.2020. | |||
