Область техники, к которой относится изобретение
Изобретение относится к малогабаритным беспилотным воздушным судам мультироторного типа (БВС), беспилотным летательным аппаратам (БПЛА), предназначенным для аэрофотовидеосъемки, воздушного наблюдения с возможностью передачи информации, получаемой бортовыми устройствами и датчиками, на наземную станцию управления в реальном времени, а также для доставки грузов.
Уровень техники
Современные беспилотные авиационные системы представляют собой наукоемкую, высокотехнологичную область и являются одним из наиболее перспективных направлений развития авиации. В настоящее время широкое распространение получили беспилотные авиационные устройства мультироторного (вертолетного) типа с вертикальным взлетом и посадкой, которые в различных источниках информации также называют беспилотными воздушными судами (БВС), беспилотными летательными аппаратами (БПЛА), дронами или коптерами. Наибольшее распространение получили модели с четырьмя несущими винтами - квадрокоптеры. Они применяются как в бытовой сфере, в качестве игрушек, так и в профессиональной для проведения видеосъемки или видеонаблюдения, для перевозки и доставки небольших полезных грузов. Для перевозки и доставки грузов профессиональные квадрокоптеры снабжены контейнерами, которые могут иметь различное конструктивное выполнение и крепление к корпусу квадрокоптера. При этом актуальным является разработка надежной и прочной конструкции квадрокоптера, включая узлы крепления грузов, с одной стороны, при оптимизации веса устройства (без учета полезной нагрузки), и возможности его быстрой сборки, с другой стороны. Создание устройства, обеспечивающего его быструю сборку, является особенно актуальным при решении задачи, связанной со снижением трудоемкости при производстве БВС, и, как следствие, повышением производительности.
Самая распространенная конструкция квадрокоптера содержит корпус и четыре несущих корпус луча, внутренние концы которых соединены с корпусом, а на внешних концах установлены электродвигатели с винтами. Наиболее известным примером такой конструкции является квадрокоптер Tarot Х4 для профессиональной аэрофотосъемки, способный поднимать в воздух трехосевые подвесы с цифровыми зеркальными фотоаппаратами. Данный квадрокоптер содержит корпус, состоящий из двух параллельных пластин, между которыми с использованием втулок закреплены четыре луча с образованием Х-образной рамной конструкции. На внешних концах лучей закреплены электродвигатели с винтами. Крепление лучей к корпусу реализовано с возможностью их складывания «зонтиком» для удобного хранения и транспортировки и оперативного разворачивания его лучей в рабочем положении системы. Однако данные квадрокоптеры предназначены для совместного использования с цифровыми зеркальными фотоаппаратами (класса Canon 5D), и не позволяют разместить полезную нагрузку других форм и размеров. Сборка данного БПЛА является сложной из-за его больших габаритов и лучей цилиндрической формы, что затрудняет прокладку проводов от электродвигателей до регулятора оборотов двигателей.
Из уровня техники известна конструкция беспилотного летательного аппарата для доставки полезной нагрузки (CN 215707118 U). Четырехвинтовой беспилотный летательный аппарат включает Х-образную раму, несущую аккумуляторную батарею, систему GPS навигации, контейнер для нескольких предметов, систему сброса предметов (выталкиватель), винты (пропеллеры), электродвигатели, опоры для размещения аппарата на твердой поверхности (на земле), систему управления полетом, видеокамеру. Аккумуляторная батарея беспилотного летательного аппарата соединена с платой управления аппаратом. Полезную нагрузку можно транспортировать на большие расстояния и осуществлять их сброс (выгрузку) в заданной точке. Перед сбросом полезной нагрузки при достижении беспилотным летательным аппаратом заданного места назначения, его видеоизображение передается на мобильное устройство оператора для подтверждения места назначения. После чего оператором формируется сигнал подтверждения сброса полезной нагрузки, который поступает на однокристальный микрокомпьютер беспилотного летательного аппарата, обрабатывается и выдает сигнал управления серводвигателем для открытия контейнера (его дверцы/крышки), содержащего полезную нагрузку для доставки. После открытия контейнера выталкиватель осуществляет сброс (перемещение) полезной нагрузки.
Однако данная конструкция БПЛА характеризуется увеличенным весом за счет наличия опор для размещения на поверхности, что оказывает негативное влияние на дальность, скорость и время полета беспилотного летательного аппарата, а также снижает допустимый вес полезной нагрузки для транспортировки. Кроме того, контейнер для полезной нагрузки имеет сложную конструкцию, т.к. предусматривает наличие дополнительного узла - выталкивателя, который, помимо увеличения веса беспилотного летательного аппарата, может в случае неисправности, полностью или частично нарушить выгрузку всех или отдельных предметов из контейнера. Дополнительно, к недостаткам можно отнести аэродинамически не оптимальное исполнение всей конструкции беспилотного летательного аппарата, т.к. все его отдельные узлы и крепежные элементы полностью открыты, что увеличивает сопротивление набегающему воздушному потоку при полете, и, соответственно, снижает скорость полета.
Из патента CN 210258823 U известна конструкция четырехвинтового летательного аппарата (квадрокоптера) для разведки и доставки средств тушения и противопожарной защиты. Аппарат позволяет выполнять поиск людей в зоне пожаров, может использоваться в военной, гражданской и коммерческой областях. Квадрокоптер оснащен корпусом с двумя видеокамерами - обычной и инфракрасной, расположенными в нижней части корпуса. Корпус квадрокоптера выполнен из огнеупорного материала. Нижняя часть корпуса жестко соединена с коробом (контейнером) для грузов, в котором размещаются противопожарная маска, емкость с водой и переносной огнетушитель. Внутри короба для фиксации грузов расположены крючки для противопожарной маски и два фиксирующих узла с ремнями - для емкости с водой и для огнетушителя. Нижняя часть короба защищена огнестойким материалом, а также к ней жестко прикреплены узлы из огнестойкой ваты, благодаря которым устройство может поглощать удары при падении.
Однако данная конструкция БПЛА сконфигурирована преимущественно для доставки средств тушения и противопожарной защиты. Контейнер для размещения средств тушения имеет сложную конструкцию, включает в себя разнообразные фиксирующие узлы, отрывающиеся (откидывающиеся) крышки, сконфигурированные для размещения определенных предметов с конкретными габаритными размерами, что не позволяет осуществлять доставку предметов, имеющих иные габариты. Кроме того, в конструкции устройства корпус для размещения средств тушения жестко прикреплен к корпусу БПЛА, что не позволяет использовать БПЛА для транспортировки других предметов и грузов, помимо средств тушения. Отсутствие отдельного универсального узла крепления контейнеров для полезной нагрузки ограничивает возможность использования БПЛА. Кроме того, в описании изобретения отсутствуют сведения, характеризующие последовательность сборки БПЛА, что является существенным при массовом производстве БПЛА при оценке трудоемкости процесса. Кроме того, в описании изобретения отсутствуют сведения о способах и средствах, обеспечивающих охлаждение греющихся электронных компонентов, размещенных в корпусе БПЛА, во время полета.
Технической проблемой, решаемой заявленным изобретением, является устранение всех перечисленных выше недостатков известных аналогов.
Раскрытие сущности изобретения
Техническим результатом является разработка надежного БВС с улучшенными эксплуатационными характеристиками, включая снижение тепловой нагрузки на электронные компоненты, при упрощении и повышении удобства его сборки.
Технический результат достигается выполнением беспилотного воздушного судна мультироторного типа (БВС) для транспортировки малогабаритных грузов, включающего:
- Х-образную раму, содержащую лучи, соединенные с усиливающей пластиной, расположенной в центральной части рамы;
- корпус с размещенными в нем электронными узлами и компонентами, закрепленный на Х-образной раме, снабженный воздухозаборниками и диффузором, расположенными на боковых поверхностях корпуса с возможностью формирования направленного воздушного потока внутрь корпуса для охлаждения электронных узлов и компонентов (и создания разрежения воздуха для увеличения скорости воздушного потока внутри корпуса), при этом корпус состоит из двух частей - верхней части, выполненной в виде крышки, и нижней, представляющей собой монтажное основание для крепления электронных узлов и компонентов;
- электродвигатели с пропеллерами (винтами), закрепленные на лучах Х-образной рамы;
- контейнер (или подвес) для размещения полезной нагрузки;
- узел крепления контейнера к корпусу, выполненный в виде кронштейна, содержащего две детали, первая из которых прикреплена к нижней части корпуса и выполнена в виде П-образной (профилированной) пластины, снабженной продольными сквозными пазами, и крепежными площадками, а вторая деталь закреплена на контейнере и выполнена в виде Г-образной (фигурной) пластины, снабженной двумя протяженными выступами (зубцами), сконфигурированными с возможностью размещения и фиксации в продольных сквозных пазах первой детали;
- узел крепления аккумулятора, закрепленный на корпусе.
Электронные узлы и компоненты (электронный блок БВС) включают: модуль командно-телеметрической радиолинии, выполненный с возможностью приема управляющего сигнала и передачи информации о качестве соединения на наземную станцию управления при помощи дипольной антенны с функцией псевдослучайной перестройки рабочей частоты (ППРЧ), и содержащий полетный контроллер; видеокамеру, видеопередающий модуль, выполненный с возможностью преобразования видеоизображения с видеокамеры в радиосигнал определенной частоты, передаваемый на всенаправленную антенну; а также узел удаленного управления полезной нагрузкой. Данный блок может иметь иную комплектацию в зависимости от решаемых задач. Электронный блок как правило содержит GPS-модуль, подключенный к полетному контроллеру для получения координат, скорости перемещения и информации о маршруте, при этом GPS-модуль может быть установлен как внутри корпуса БВС, так и с внешней стороны от корпуса. В последнем случае GPS-модуль размещен в защитном кожухе, выполненном из радиопрозрачного материала.
В одном из вариантов осуществления изобретения монтажное основание корпуса выполнено в виде Г-образной профилированной пластины, имеющей нижнюю панель, снабженную кронштейнами для крепления видеокамеры и дипольной антенны, окном для фото-видеосъемки видеокамерой, и заднюю панель, снабженную отверстиями для размещения разъемов, отверстиями для фиксации крышки, при этом видеокамера снабжена сервоприводом; при этом кронштейн для дипольной антенны, дипольная антенна и видеокамера выполнены с возможностью поворота в продольной плоскости, перпендикулярной монтажному основанию. Крышка корпуса выполнена в виде профилированной детали, имеющей переднюю панель, снабженную перфорацией для поступления встречного воздушного потока внутрь корпуса и вырезом для видеокамеры с возможностью изменения направления фотовидеосъемки, и боковые панели, на которых расположены воздухозаборники и диффузоры симметрично относительно продольной оси корпуса.
В узле крепления контейнера к корпусу в вертикальных сопрягаемых элементах Г-образной и П-образной пластин (первой и второй деталей) могут быть выполнены отверстия для фиксации пластин между собой. Протяженные выступы второй детали узла крепления контейнера к корпусу имеют Г-образную конфигурацию, снабжены скошенными (заходными) кромками.
Лучи Х-образной рамы могут иметь различную конфигурацию, например, могут быть выполнены в виде полых протяженных элементов с П-образным, округлым, или прямоугольным профилем поперечного сечения с возможностью размещения электрических проводов для подачи тока к электродвигателям размещены в полости лучей. Возможен вариант выполнения лучей Х-образной рамы без образования полостей, в виде протяженных прямоугольных или округлых элементов, например, из текстолитовых брусков, при этом электрические провода для подачи тока к электродвигателям размещены по внешней поверхности лучей и закреплены на них с использованием термоусадочного материала или полимерных хомутов.
В отдельных вариантах выполнения БВС может содержать складные опоры, в транспортном положении выполненные с возможностью размещения вдоль лучей Х-образной рамы.
Узел крепления аккумулятора может быть выполнен в виде жестко закрепленных на верхней части корпуса уголковых элементов с продольными прорезями для размещения в них фиксирующих ремней.
Заявленное устройство характеризуется выполнением элементов корпуса, рамы, контейнера с кронштейном для полезной нагрузки облегченными, из профилированных пластин, сконфигурированных с обеспечением оптимизации габаритных размеров, веса и с упрощением технологии сборки устройства. Удобство сборки обеспечивается, в т.ч. за счет выполнения узла крепления полезной нагрузки к корпусу БВС в виде кронштейна, имеющего оригинальную конструкцию из двух соединяемых (или разъемных) профилированных деталей. Одна из деталей жестко соединена с корпусом для электронных узлов и компонент, вторая - с контейнером, предназначенным для размещения полезной нагрузки, который также может быть выполнен в виде корпуса. Конфигурация данного кронштейна обеспечивает быстрое, простое и надежное соединение корпуса, предназначенного для размещения электронных узлов и компонентов, с контейнером, предназначенным для размещения полезной нагрузки. Крепление аккумулятора реализовано с помощью ременных элементов, закрепленных на верхней части корпуса для размещения электронных узлов и компонентов. Улучшение эксплуатационных характеристик достигается выполнением корпуса для электронных узлов и компонент с возможностью их охлаждения в процессе выполнения полетного задания (в т.ч. за счет использования воздухозаборников и диффузоров), что особенно актуально в условиях жаркого климата.
Заявленное устройство обеспечивает безопасную работу оператора, возможность удаленного управления полезной нагрузкой, передачу кадров съемки с помощью системы видеопередачи, а также, обеспечивает устойчивую работу БВС в условиях повышенной температуры окружающей среды и нагрева силовых электронных компонентов, высокую скорость замены аккумулятора и закрепления полезной нагрузки, что в совокупности улучшает эксплуатационные характеристики и повышает эффективность работы БВС.
Заявленное устройство в одном из вариантов его реализации обеспечивает транспортировку полезной нагрузки весом до 3,5 кг, в зависимости от конфигурации двигателей и пропеллеров, при этом имеет вес без полезной нагрузки, не превышающий 3 кг; время полета с полезной нагрузкой составляет не менее 12 минут, без полезной нагрузки - не менее 25 минут с максимальным удалением от наземной станции управления до 10 км. Устройство имеет специализированный кронштейн для удобного крепления полезной нагрузки, а также разъем для подключения и управления полезной нагрузкой. Командно-телеметрическая радиолиния оснащена псевдослучайной перестройкой рабочей частоты. Устройство поддерживает любые типы аккумуляторов, имеющих разъем XT60. В одном из вариантов реализации корпус БВС состоит из сплава Амг3М и использует лучи Х-образной рамы из стеклотекстолита, что позволяет повысить прочность конструкции летательного аппарата.
Краткое описание чертежей
Конструкция БВС поясняется чертежами.
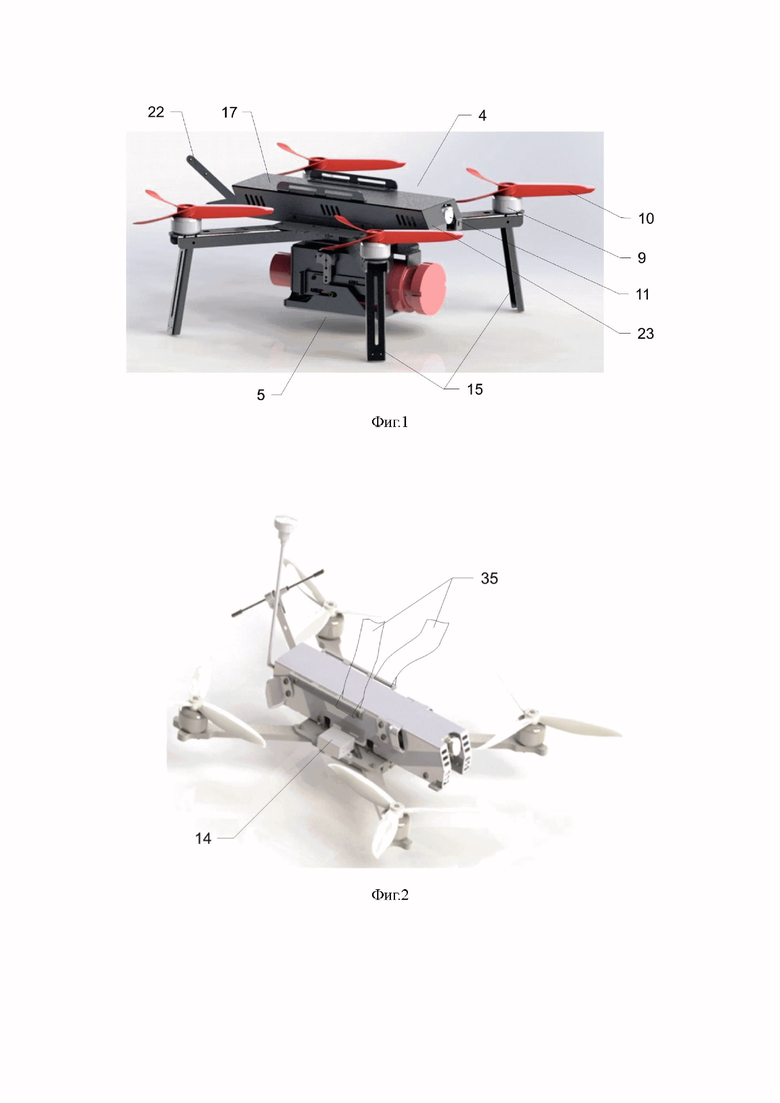
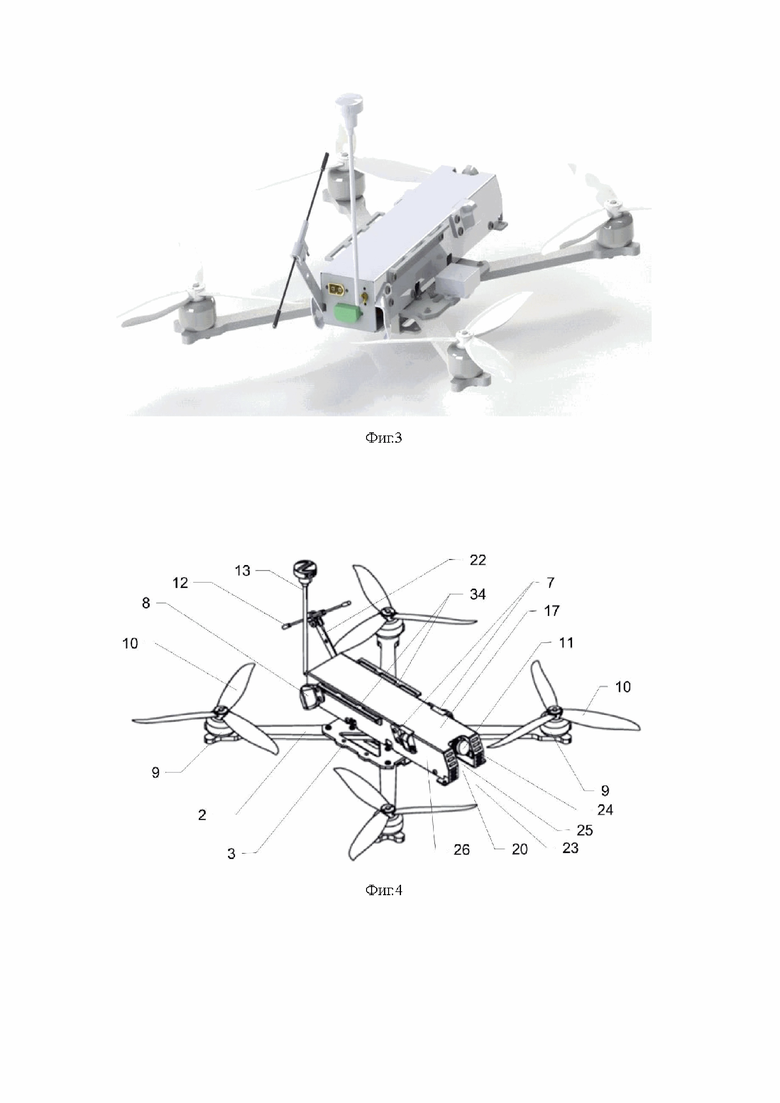
На фиг. 1 представлена фотография варианта БВС с откидными опорами (ножками); на фигурах 2 и 3 - фотографии варианта БВС без откидных опор, общий вид спереди и сзади, соответственно.
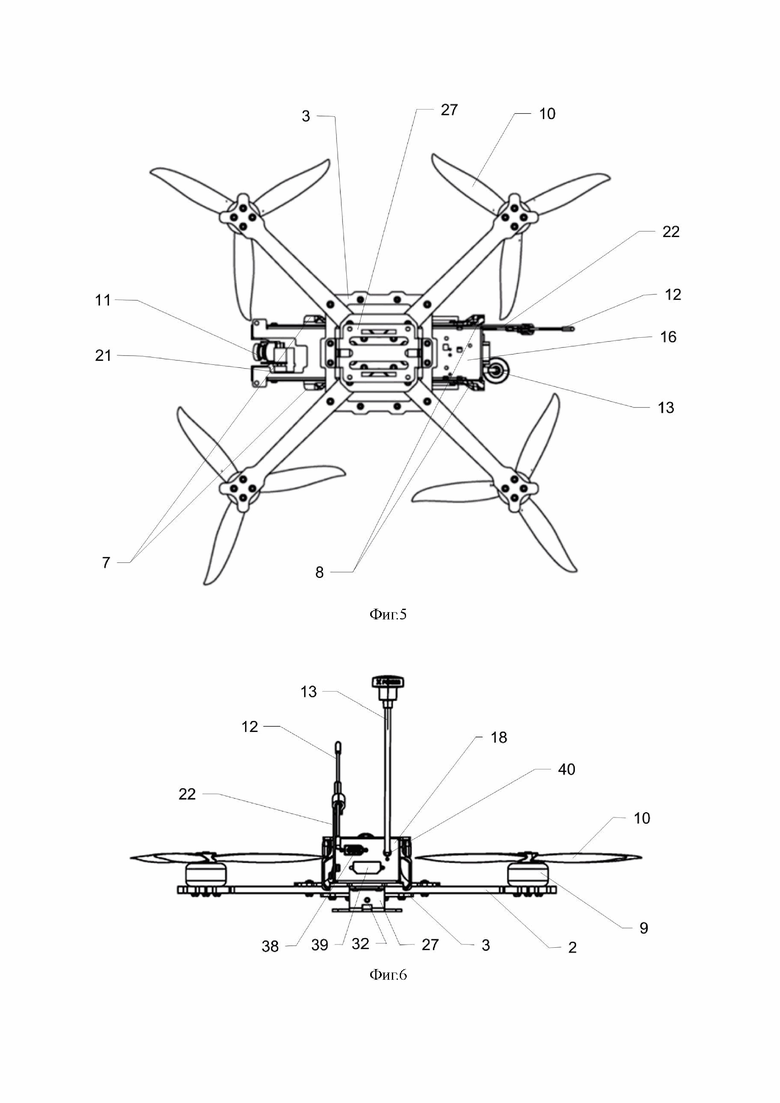
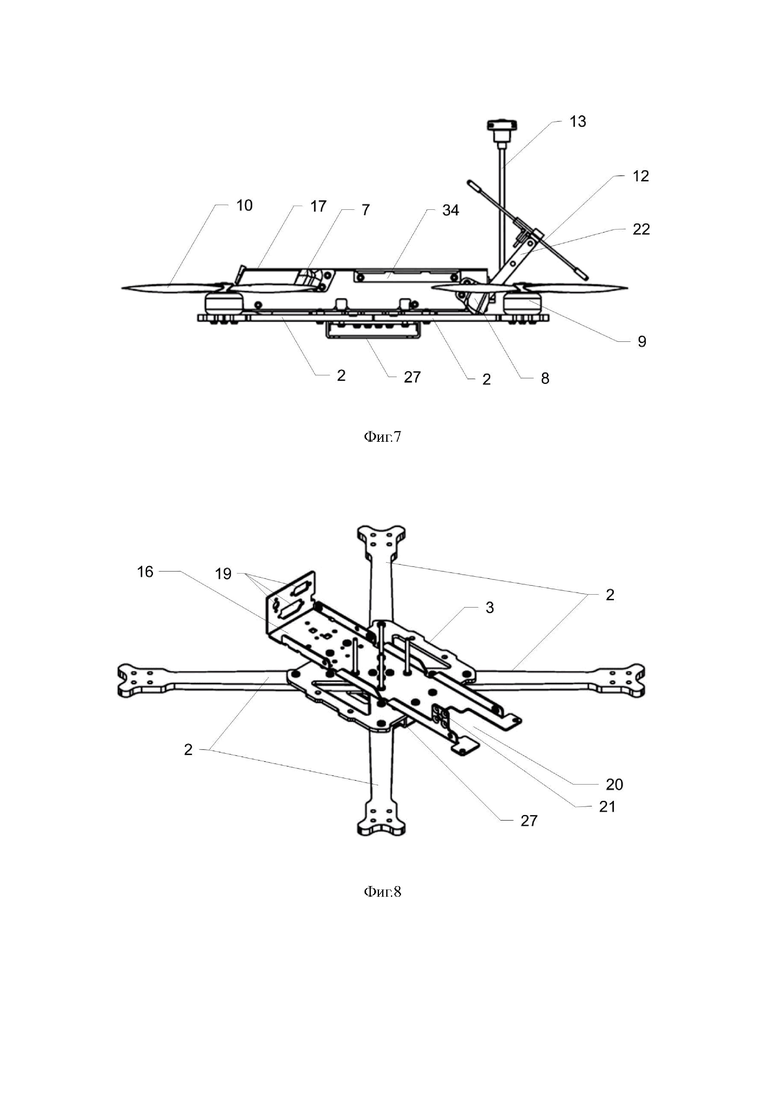
На фиг. 4-7 представлены чертежи одного из вариантов реализации БВС, общий вида БВС, вид снизу, вид сзади - со стороны антенн, вид сбоку - со стороны размещения кронштейна для дипольной антенны.
На фиг. 8-10 показан вариант выполнения Х-образной рамы и ее лучей, а также нижней части корпуса БВС; а именно: на фиг. 8 представлен общий вид Х-образной рамы с нижней частью корпуса БВС, на фиг. 9 - вид сверху на Х-образную раму, на фиг. 10 - разрез А-А фиг. 9.
На фиг. 11-13 представлено выполнение кронштейна (или узла крепления контейнера для полезной нагрузки к корпусу для размещения в нем электронных узлов и компонентов) в сборе, а именно, вид на П- и Г-образные пластины в сборе в положении для транспортировки грузов; где на фигуре 11 представлен общий вид кронштейна, на фиг. 12 - вид на соединенные П- и Г-образные пластины сверху; на фиг. 13 - разрез В-В соединенных П- и Г-образных пластин фиг. 12.
На фиг. 14 представлена нижняя часть корпуса (монтажное основание) с электронными компонентами.
На фиг. 15-39 показаны три варианта, объединяющих пять различных модификаций контейнера для полезной нагрузки, преимущественно, цилиндрической формы, содержащих Г-образную пластину кронштейна (крепежного узла).
В частности, на фиг. 15-19 показан первый вариант выполнения контейнера для размещения полезной нагрузки (первая модификация), имеющей цилиндрическую форму. В данном варианте БВС выполнено только с функцией транспортировки грузов, без функции сброса. На фиг. 15 представлена фотография общего вида контейнера, на фиг. 16 - чертеж общего вида контейнера, на фиг. 17 - чертеж вида сверху на контейнер, на фиг. 18 - разрез J-J контейнера фиг. 17; на фиг. 19 - разрез I-I контейнера фиг. 17.
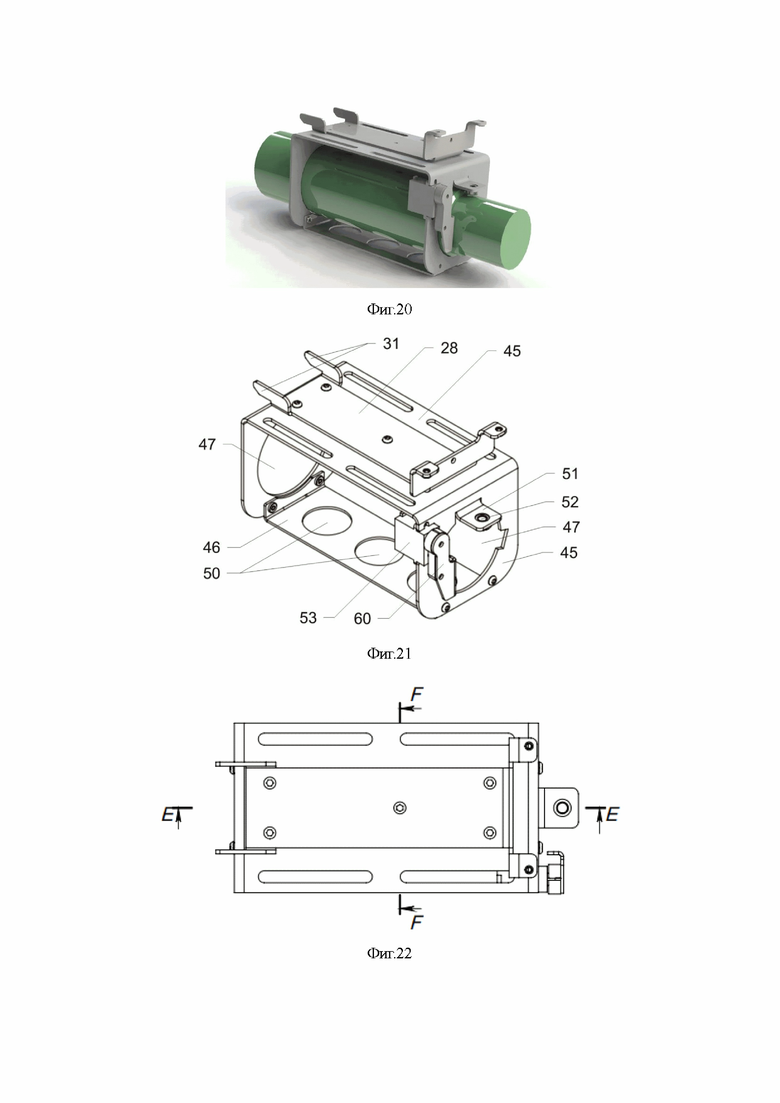
На фиг. 20-24 показан первый вариант выполнения контейнера для размещения полезной нагрузки (вторая модификация), где на фиг. 20 представлена фотография общего вида контейнера, на фиг. 21 - чертеж общего вида контейнера, на фиг. 22 - чертеж вида сверху на контейнер, на фиг. 23 - разрез E-E контейнера фигуры 22; на фиг. 24 - разрез F-F контейнера фиг. 22.
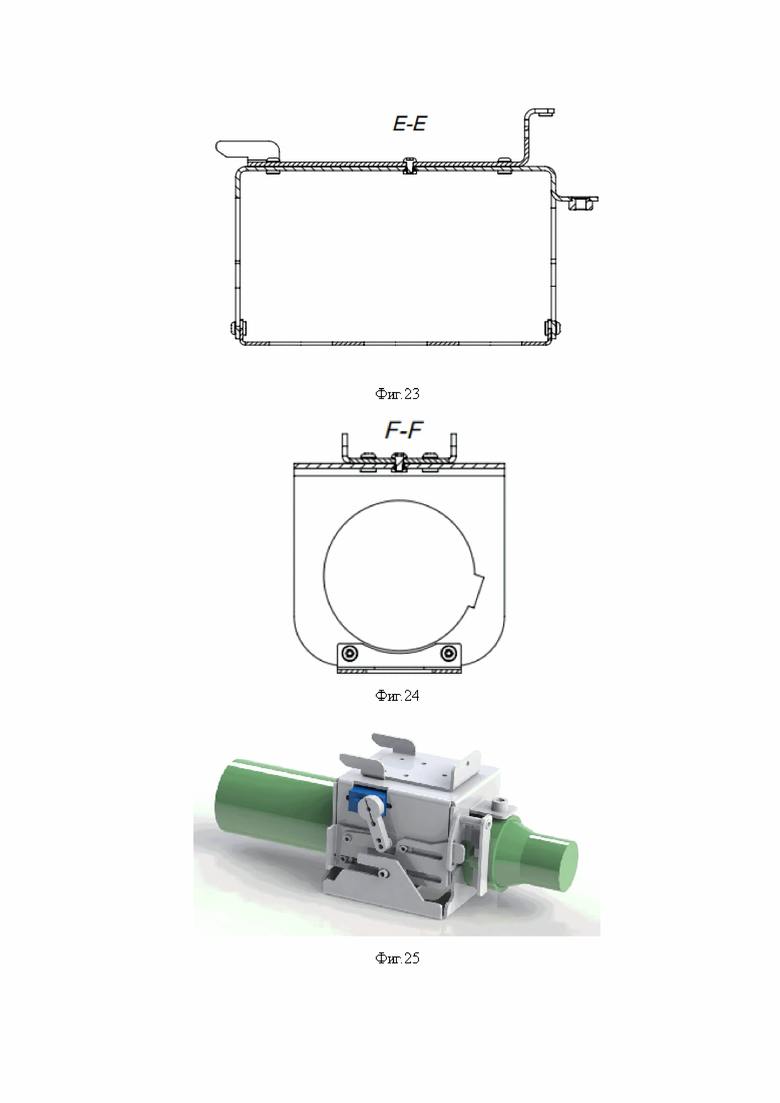
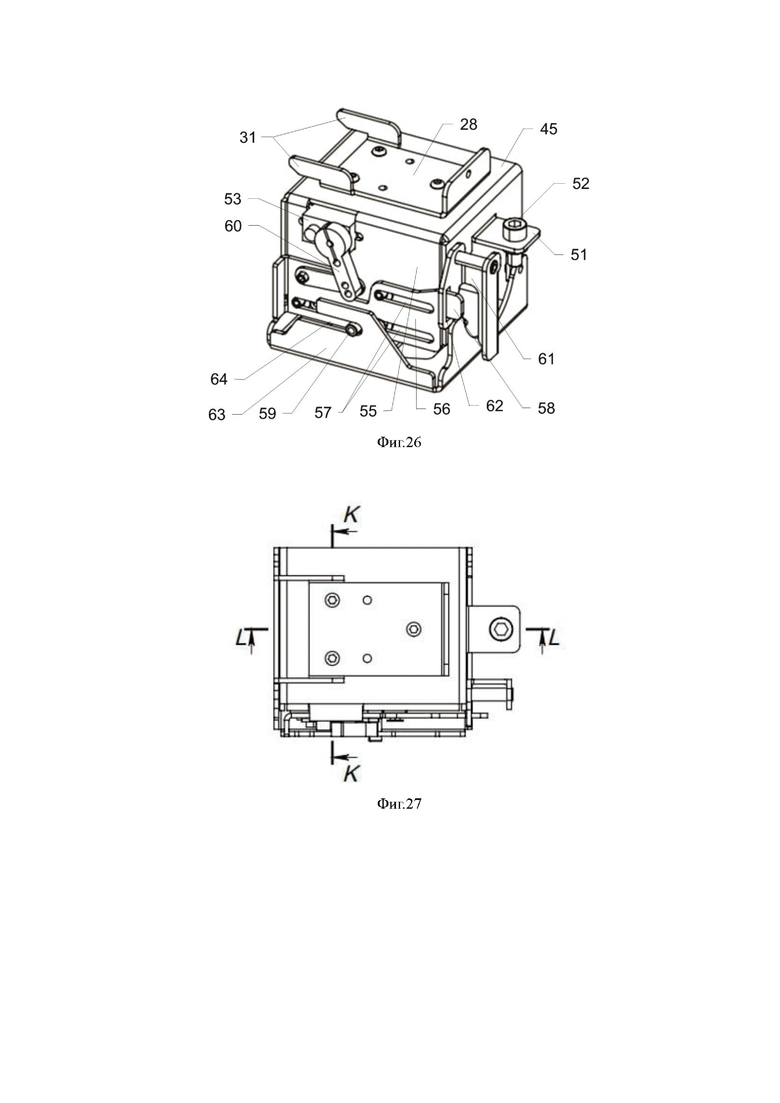
На фиг. 25-29 показан второй вариант выполнения контейнера для размещения полезной нагрузки (первая модификация). В данном варианте БВС выполнено с функцией сброса полезной нагрузки. На фиг. 25 представлена фотография общего вида контейнера, на фиг. 26 - чертеж общего вида контейнера, на фиг. 27 - чертеж вида сверху на контейнер, на фиг. 28 - разрез К-К контейнера фиг. 27; на фиг. 29 - разрез L-L контейнера фиг. 27.
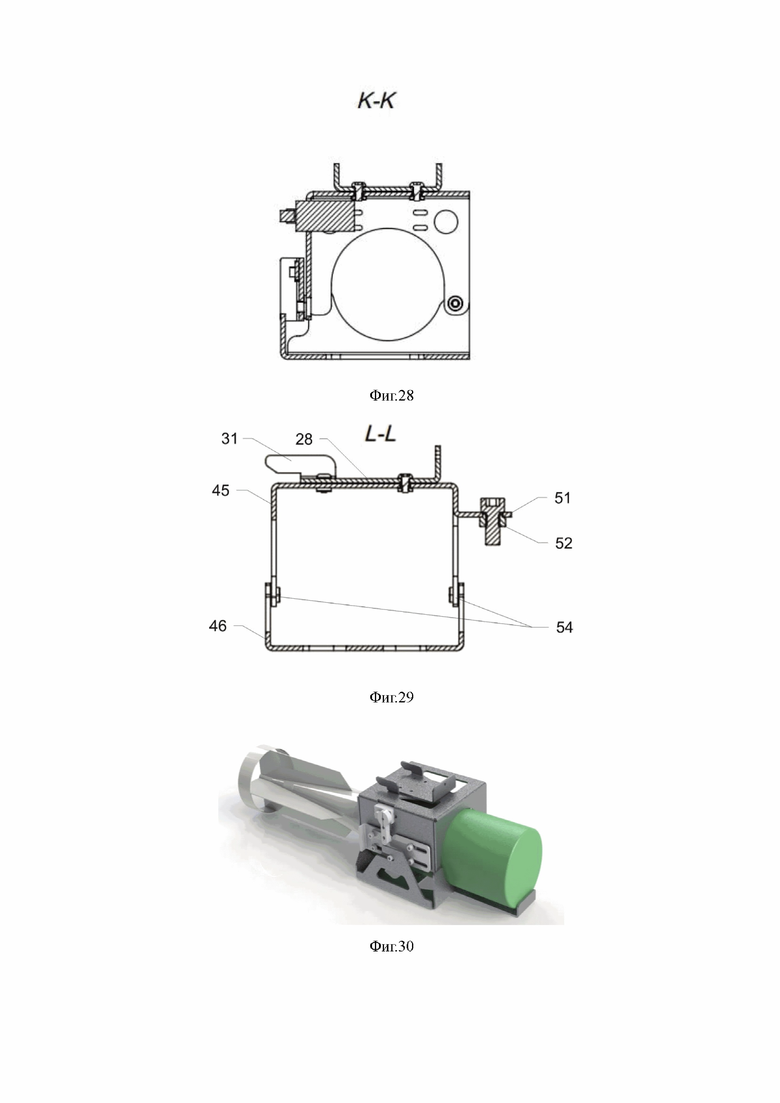
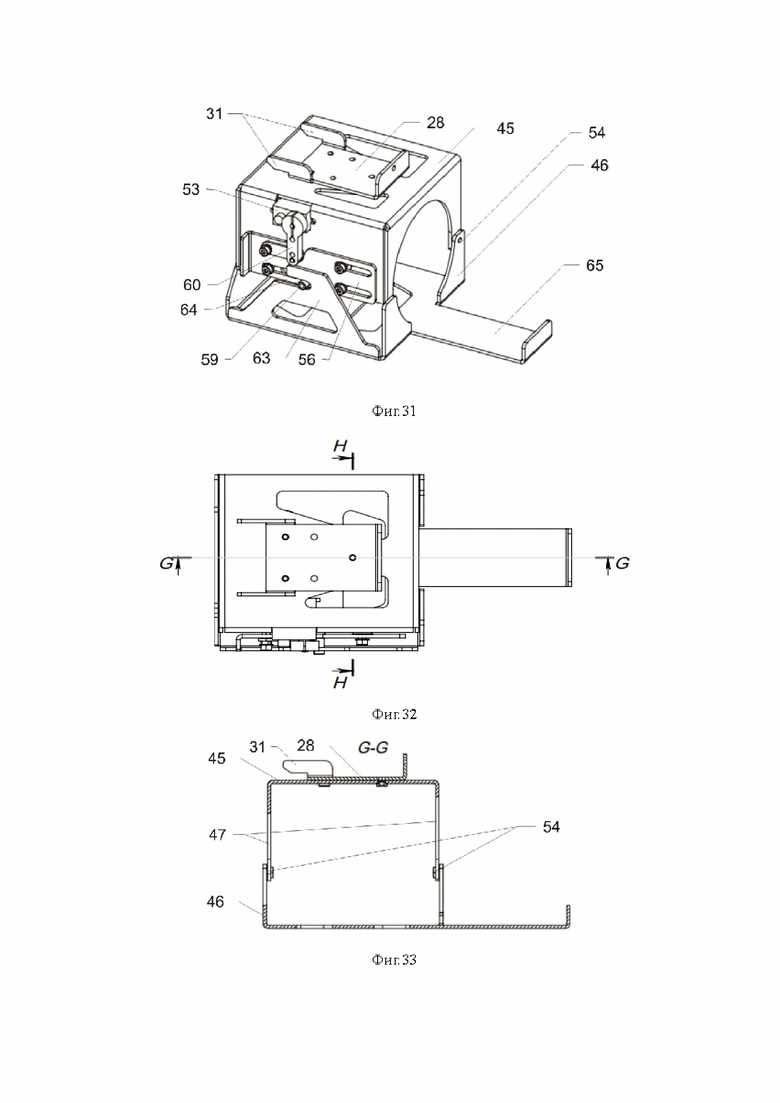
На фиг. 30-34 показан второй вариант выполнения контейнера для размещения полезной нагрузки (вторая модификация), где на фиг. 30 представлена фотография общего вида контейнера, на фиг. 31 - чертеж общего вида контейнера, на фиг. 32 - чертеж вида сверху на контейнер, на фиг. 33 - разрез G-G контейнера фиг. 32; на фиг. 34 - разрез H-H контейнера фиг. 32.
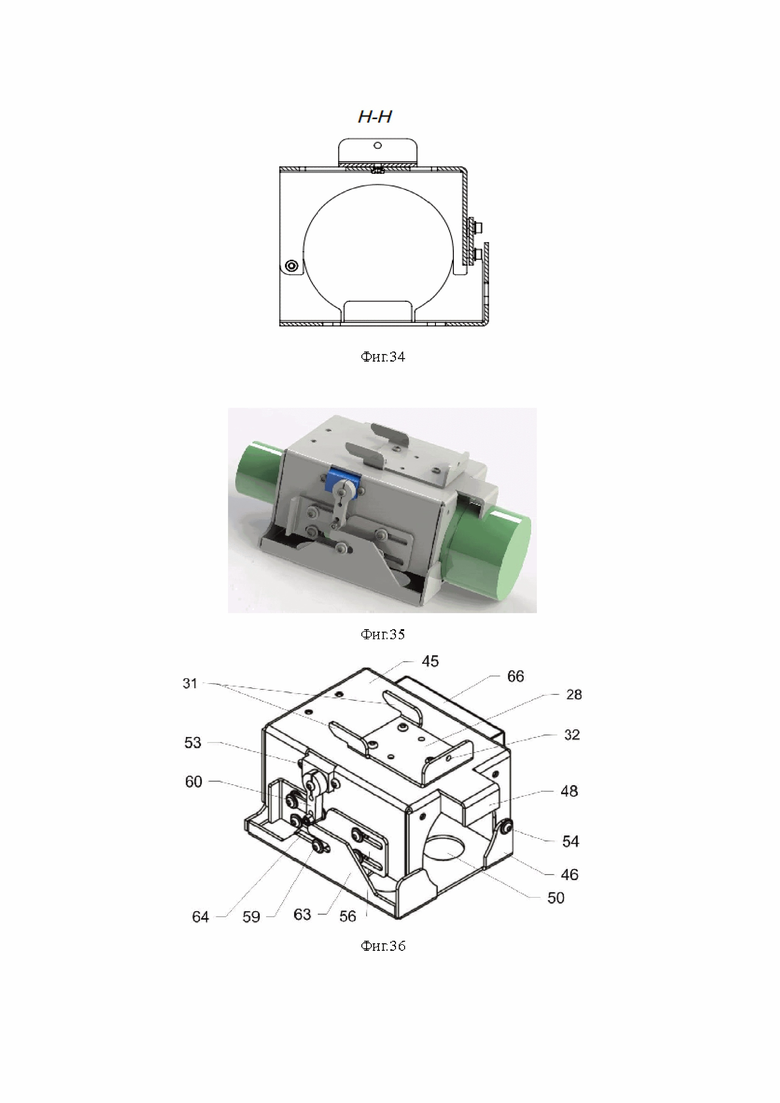
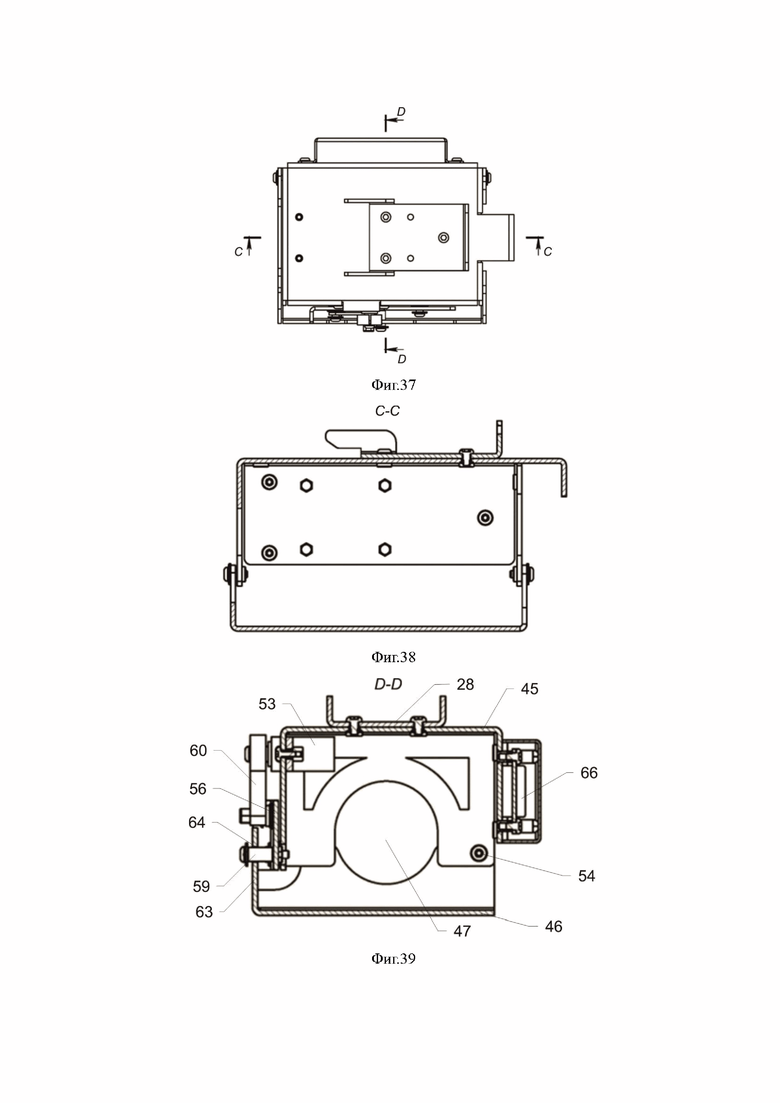
На фиг. 35-39 показан третий вариант выполнения контейнера для размещения полезной нагрузки, выполненный по аналогии со вторым вариантом контейнера, предусматривающим функцию сброса полезной нагрузки, где на фиг. 35 представлена фотография общего вида контейнера, на фиг. 36 - чертеж общего вида контейнера, на фиг. 37 - чертеж вида сверху на контейнер, на фиг. 38 - разрез С-С контейнера фигуры 37; на фиг. 39 - разрез D-D контейнера фиг. 37.
Заявленное БВС содержит следующие детали и узлы: 1 - Х-образная рама, 2 - лучи рамы, 3 - усиливающая пластина, 4 - корпус для размещения электронных узлов и компонентов, 5 - контейнер для размещения полезной нагрузки, 6 - узел крепления контейнера к корпусу (или кронштейн для крепления контейнера к корпусу), 7 - воздухозаборник, 8 - диффузор, 9 - электродвигатели, 10 - пропеллеры (винты), 11 - видеокамера, 12 - дипольная антенна, 13 - всенаправленная антенна, 14 - GPS-модуль, 15 - складные опоры.
Корпус 4 для размещения электронных узлов и компонентов включает следующие конструктивные элементы: 16 - нижняя часть корпуса (монтажное основание), 17 - верхняя часть корпуса (крышка), 18 - задняя панель монтажного основания, 19 - отверстия для размещения разъемов на задней панели монтажного основания, 20 - окно для фотовидеосъемки видеокамерой, выполненное в нижней панели монтажного основания, 21 - кронштейн для крепления видеокамеры, 22 - кронштейн для крепления дипольной антенны, 23 - передняя панель крышки, 24 - перфорация на передней панели крышки, 25 - вырез на передней панели крышки для видеокамеры, 26 - боковые панели крышки.
Кронштейн 6 (или узел крепления контейнера для полезной нагрузки к корпусу для размещения электронных узлов и компонент) включает следующие конструктивные элементы: 27 - первая деталь - П-образная профилированная пластина, 28 - вторая деталь - Г-образная фигурная пластина, 29 - продольные сквозные пазы первой детали, 30 - крепежные площадки первой детали, 31 - протяженные выступы (зубцы) второй детали, 32 - отверстия для фиксации пластин - первой и второй деталей, между собой, 33 - «заходные» (или скошенные) кромки.
Узел крепления аккумулятора к корпусу включает: 34 - уголковые элементы с продольными прорезями, 35 - фиксирующие ремни.
Модуль командно-измерительной системы и командно-телеметрической радиолинии (или модуль командно-телеметрической радиолинии, содержащий электронные узлы и компоненты) включает: 36 - плата полетного контроллера с электронными компонентами и плата регулятора оборотов, 37 - видеопередающий модуль, 38 - разъем для электропитания электронных компонентов, 39 - разъемы для соединения с внешними устройствами и взаимодействия с нагрузкой посредством широтно-импульсной модуляции (ШИМ), 40 - разъем для установки всенаправленной антенны видеопередатчика, 41 - приемопередающий модуль управляющих радиосигналов (команд), 42 - микросхемы полетного контроллера, гироскопа, барометра, компаса, GPS и т.д., 43 - серводвигатель для управления положением видеокамеры, 44 - преобразователь напряжения.
Контейнер 5 включает: 45 - верхняя пластина контейнера 5, имеющая П-образный профиль при виде сбоку, 46 - нижняя пластина контейнера 5; 47 - отверстия в верхней пластине 45 для полезной нагрузки, 48 - Г-образный упор пластины 45 для фиксации полезной нагрузки; 49 - защитный кожух, 50 - отверстия или вырезы в пластинах для снижения веса контейнера 5; 51 - выступ, размещенный на передней вертикальной панели П-образной пластины 45; 52 - винтовая резьба для винта на выступе 51 пластины 45; 53 - сервопривовод, 54 - шарнирное соединение верхней пластины 45 с нижней пластиной 46; 55 - боковая панель верхней пластины 45; 56 - подвижная пластина, размещенная на боковой панели 55 верхней пластины 45; 57 - пазы в подвижной пластине 56; 58 - выступающая часть подвижной пластины 56; 59 - втулка подвижной пластины 56; 60 - рычаг, закрепленный на сервоприводе 53 (первый рычаг); 61 - подпружиненный рычаг (второй рычаг); 62 - паз в подпружиненном рычаге, 63 - фигурный выступ нижней пластины 46, 64 - продольный паз на фигурном выступе 63; 65 - протяженная упорная планка для фиксации полезной нагрузки, 66 - плата контейнера.
Осуществление изобретения
Беспилотное воздушное судно мультироторного типа (БВС) для транспортировки малогабаритных грузов (фиг. 1-4) включает Х-образную раму 1, образованную четырьмя лучами 2, жестко закрепленными на усиливающей пластине 3 в центральной части рамы. На удаленных концах лучей 2 закреплены электродвигатели 9 с пропеллерами 10. В одном из вариантов осуществления изобретения БВС может быть выполнено со складными опорами 15, как показано на фиг. 1, которые в транспортном положении могут размещаться вдоль лучей 2. Данный вариант является предпочтительным в случае запуска БВС с неровных поверхностей. В альтернативном варианте осуществления изобретения БВС может быть выполнено без опор 15, как показано на фиг. 2 и 3.
На фиг. 1-10 представлены изображения варианта БВС, демонстрирующего выполнение корпуса 4, предназначенного для размещения электронных узлов и компонентов, и контейнера 5, предназначенного для размещения полезной нагрузки, которые соединены между собой с помощью узла крепления 6, детализация которого представлена на фиг. 11-13. На фиг. 14 представлен возможный вариант компоновки электронных узлов и элементов, смонтированных на монтажном основании корпуса. На фиг. 15-39 представлены варианты выполнения контейнера 5 под различную конфигурацию полезной нагрузки.
Корпус БВС состоит из двух частей: нижней части, представляющей собой монтажное основание 16 (фиг. 8-10, 14), и содержащей крепежные отверстия, отверстия для размещения разъемов и кронштейны для закрепления других элементов, электронных узлов, и компонентов; и верхней части, выполненной в виде крышки 17 (фиг. 4). Монтажное основание 16 может быть закреплено непосредственно на лучах Х-образной рамы или ее усиливающей пластине 3 (фиг. 4). Усиливающая пластина 3 предпочтительно закреплена поверх лучей Х-образной рамы, при этом возможен вариант реализации изобретения, согласно которому усиливающая пластина закреплена с нижней стороны лучей Х-образной рамы. Возможен вариант выполнения БВС с одной или двумя усиливающими пластинами 3. В последнем случае лучи Х-образной рамы закреплены между двумя усиливающими пластинами 3. Усиливающая пластина может иметь различную конфигурацию. В одном из вариантов реализации усиливающая пластина может быть выполнена прямоугольной с отверстиями или вырезами для снижения ее веса. В другом варианте выполнения усиливающая пластина может повторять форму Х-образной рамы в ее центральной части. Крышка 17, закрывает электронные узлы и компоненты, расположенные на монтажном основании 16, защищая их от влаги и внешних физических воздействий. Фиксация частей корпуса 4 может быть реализована различными известными из уровня средствами, например, с помощью винтовых соединений.
Монтажное основание 16 в одном из вариантов осуществления изобретения выполнено в виде Г-образной профилированной пластины, содержащей две перпендикулярно расположенные панели - нижнюю и заднюю (фиг. 8, 14). Монтажное основание 16 снабжено крепежными отверстиями, отверстиями для размещения разъемов и кронштейны для крепления других конструктивных элементов и компонентов. В частности, монтажное основание 16 снабжено кронштейном 21 для крепления серводвигателя 43 видеокамеры 11, кронштейном 22 для крепления дипольной антенны 12 (фиг. 7), вырезом (окном) 20 для фото-видеосъемки видеокамерой. Кронштейн 22 для дипольной антенны закреплен на нижней панели монтажного основания с возможностью поворота в продольной плоскости, перпендикулярной нижней панели монтажного основания 16, а дипольная антенна 12 выполнена с возможностью поворота относительно конца кронштейна 22 в его плоскости вращения. Задняя панель 18 монтажного основания снабжена отверстиями 19 для размещения разъемов, отверстиями для фиксации крышки.
Крышка 17 корпуса 4 может иметь различную конфигурацию, и, как правило, содержит переднюю, верхнюю и боковые панели. На передней панели 23 крышки 17 выполнена перфорация в виде щелевых отверстий 24 (фиг. 1, 2), пропускающих встречный воздушный поток при выполнении беспилотным летательным аппаратом полетного задания, и вырез 25 для видеокамеры 11, имеющий конфигурацию, обеспечивающую видео и фотосъемку при изменении направления положения видеокамеры.
В верхней части 17 корпуса 4 выполнены воздухозаборники 7 и диффузоры 8, расположенные симметрично относительно продольной оси корпуса 4 на его боковых поверхностях, в качестве которых могут выступать боковые панели 26 крышки 17. В одном из вариантов осуществления изобретения воздухозаборники 7 могут быть выполнены в виде щелевых отверстий в боковых панелях корпуса 4 или крышки, как показано на фиг. 1. В другом варианте реализации изобретения воздухозаборники 7 сформированы в виде выступающих деталей, размещенных с противоположных боковых сторон корпуса, имеющих обтекаемую форму внешней поверхности, снабженных каналом, направленным навстречу воздушному потоку при выполнении беспилотным летательным аппаратом полетного задания (фиг. 2 и 3). При полете БВС встречный поток воздуха захватывается воздухозаборниками 7 и поступает внутрь первого корпуса с формированием направленного воздушного потока, охлаждая электронные узлы и компоненты. Диффузоры 8, расположенные в задней части корпуса создают дополнительное разрежение воздуха, что позволяет увеличить скорость и объем пропускаемого внутри корпуса воздушного потока и, таким образом, увеличивает эффективность охлаждения электронных узлов и компонентов. Диффузоры 8 могут быть выполнены в виде отдельных деталей, например в виде изогнутых пластин, также закрепленных на боковых панелях корпуса 4 или крышки 17.
Узел крепления контейнера 5 к корпусу 4 выполнен в виде кронштейна 6, который содержит две детали (фиг. 11-13), первая 27 из которых прикреплена к нижней части корпуса 4 и выполнена в виде П-образной профилированной пластины, снабженной продольными сквозными пазами 29 и крепежными площадками 30. Крепежные площадки 30 образованы концевыми участками П-образной пластины, отогнутыми наружу на угол 90 градусов с обеспечением возможности их крепления к корпусу 4 с его нижней стороны между лучами 2 Х-образной рамы 1. В одном из вариантов осуществления изобретения возможно прикрепление П-образной пластины к усиливающей пластине 3, размещенной под корпусом 4, с ее нижней стороны. Вторая деталь 28 закреплена на контейнере 5 и выполнена в виде Г-образной фигурной пластины, снабженной двумя протяженными выступами (зубцами) 31, расположенными как показано на фиг. 11. Протяженные выступы 31 имеют скошенные «заходные» кромки 33, выполненные с возможностью размещения в продольных сквозных пазах первой детали 27. При размещении выступов 31 в продольных пазах первой детали 27 формируется узел крепления контейнера 5 в БВС, который может быть дополнительно усилен винтовым соединением с использованием, по меньшей мере, одного отверстия 32, которое предотвращает непроизвольное смещение второй детали 28 относительно первой 27 в процессе выполнения полетного задания.
На удаленных концах лучей Х-образной рамы 2 размещены электродвигатели 9 с пропеллерами (винтами) 10. Боковые части лучей содержат отверстия с резьбовыми втулками для крепления различных элементов. Лучи 2 могут быть выполнены в виде протяженных элементов с П-образным, округлым, или прямоугольным полым, сплошным или перфорированным профилем поперечного сечения. В одном из вариантов выполнения БВС провода для подачи тока к электродвигателям могут быть размещены внутри профилей лучей, или, в другом варианте, могут быть расположены по внешней поверхности лучей и закреплены с помощью термоусадочного материала или полимерных хомутов. Управление скоростями вращения электродвигателей осуществляется с помощью модуля командно-измерительной системы, расположенного на монтажном основании первого корпуса (фиг. 14).
В БВС узел крепления аккумуляторов реализован с помощью уголковых элементов 34, снабженных продольными прорезями, и фиксирующих ремней 35. Уголковые элементы 34 могут быть закреплены на боковых панелях корпуса 4 или на его верхней панели (на крышке 17). Аккумуляторы размещают на крышке корпуса между уголковыми элементами 34 и закрепляют с помощью фиксирующих ремней, которые пропускают сквозь продольные прорези 34 в уголковых элементах, стягивают между собой, обеспечивая, таким образом, плотное закрепление аккумуляторов в БВС.
Все электронные узлы и компоненты как было указано выше, смонтированы в нижней части корпуса (фиг. 14) на монтажном основании 16, включая:
две платы 36 модуля командно-измерительной системы с электронными компонентами, одна из которых - слаботочная - служит для размещения датчиков, микросхемы полетного контроллера и стабилизаторов напряжения, микроконтроллера, гироскопа, барометра, микросхемы наложения телеметрии на видеопоток, преобразователя напряжения, а вторая - сильноточная - служит для размещения силовой электроники - элементов управления большими токами и скоростью вращения электродвигателей 9, которые подключены к слаботочной плате, при этом платы размещены на монтажном основании одна над другой;
видеопередающий модуль 37, который служит для получения и обработки сигналов с видеокамеры 11, передачи обработанного сигнала через разъем 40 на всенаправленную антенну 13;
видеокамеру 11, которая служит для передачи видеосигнала в полетный контроллер, где происходит наложение текстовой информации (телеметрии), после чего обработанный видеосигнал передается в видеопередающий модуль 37 (фиг. 14), который преобразует его в радиосигнал определённой частоты и передает на всенаправленную антенну 13. Этот сигнал принимается специализированным приемником радиосигнала, который преобразует его в поток видео, выводимый на экран или очки оператора БВС;
приемопередающий модуль управляющих радиосигналов (команд) 41, который осуществляет прием управляющего сигнала и передачу информации о качестве соединения с помощью модуля командно-измерительной системы 36 на наземную станцию управления или, при помощи дипольной антенны 12, - оператору БВС;
микросхемы 42 полетного контроллера, гироскопа, барометра, расположенные на плате 36 для слаботочной электроники;
элементы навигации - магнитометр и GPS - (на фигурах не показаны), которые могут быть закреплены как внутри корпуса 4, так и снаружи, например, на усиливающей пластине 3; при размещении элементов навигации внутри корпуса 4 корпус должен быть выполнен из радиопрозрачного материала, при размещении с внешней стороны корпуса - элементы навигации должны быть размещены в защитном радиопрозрачном кожухе;
преобразователь напряжения 44, необходимый для подачи питания 5V на универсальный разъём 39.
Платы 36 модуля командно-телеметрической радиолинии с электронными компонентами, видеопередающий модуль 37, приемный модуль (приемопередатчик) управляющих радиосигналов (команд) и телеметрических данных 41, как правило, закреплены на монтажном основании 16 с помощью винтовых соединений. Видеокамера 11 и управляющий ее положением серводвигатель 43 зафиксированы со стороны передней части монтажного основания с помощью кронштейна 21 (фиг. 6, 8). На задней панели монтажного основания 18 выполнены три отверстия 19 (фиг. 6), в которых закреплены: разъем 38 для электропитания электронных компонентов и взаимодействия с нагрузкой посредством широтно-импульсной модуляции, разъем 39 для соединения с внешними устройствами и разъем 40 для установки всенаправленной антенны 13 видеопередающего модуля 37.
Контейнер 5 для полезной нагрузки может иметь различное конструктивное исполнение в зависимости от формы и габаритов полезной нагрузки. Для всех таких вариантов узел крепления 6 корпуса 4 и контейнера 5 имеет аналогичное исполнение (фиг. 11-13). К корпусу 4 с закрепленной с его нижней стороны П-образной профилированной пластиной 27, контейнер 5 прикреплен с помощью Г-образной фигурной пластины 28, при этом контейнер 5 может иметь различную модификацию. На фиг. 15-39 показаны различные варианты выполнения контейнера 5 для размещения полезной нагрузки.
В первом варианте исполнения (фиг. 15-19) контейнер 5 для полезной нагрузки, имеющей преимущественно протяженную цилиндрическую форму с примерными габаритами 170х50х50 мм, содержит две соединенные между собой винтовым соединением профилированные пластины, верхнюю 45 и нижнюю 46. Верхняя пластина имеет П-образный профиль при виде сбоку - содержит горизонтальную и две вертикальных панели. Вертикальные панели снабжены параллельно расположенными отверстиями 47, имеющими форму, обеспечивающую размещение в них полезной нагрузки. В конкретном варианте реализации контейнера отверстия 47 могут иметь конфигурацию, соответствующую конфигурации поперечного сечения полезной нагрузки. Верхняя пластина с передней стороны снабжена выступающим Г-образным упором 48 для фиксации полезной нагрузки в заданном положении, с задней стороны - защитным кожухом 49 от продуктов горения, возникающих, например, в случае воспламенения полезной нагрузки при выполнении полетного задания. Данный кожух предпочтительно имеет П-образную форму в поперечном сечении, задняя стенка кожуха выполнена с наклоном к верхней стенке кожуха под углом 110 - 170 градусов, при этом боковые стенки кожуха в зоне сопряжения с его задней стенкой выполнены скругленными. Нижняя пластина 46 контейнера 5 используется для удержания полезной нагрузки в контейнере, а также для увеличения прочности конструкции. При этом для снижения веса контейнера нижняя пластина 46 снабжена отверстиями 50 или вырезами. Нижнюю пластину 46 прикрепляют к верхней пластине 45 с использованием винтовых соединений после размещения в верхней пластине 45 полезной нагрузки.
Данная конструкция контейнера 5 может иметь различные модификации, например, для размещения полезной нагрузки, не создающей угрозы воспламенения (фиг. 20-24). В данном случае может отсутствовать защитный кожух 49. Еще в одном варианте выполнения П-образная пластина 45 вместо Г-образного упора 48 может быть снабжена выступом 51, размещенным на передней вертикальной панели П-образной пластины, и снабженным винтовой резьбой 52 для винта, обеспечивающего фиксацию полезной нагрузки в заданном положении при ее размещении в П-образной пластине. Кроме того, в последнем варианте контейнер снабжен сервопривоводом 53, размещенным на передней вертикальной панели П-образной пластины для взаимодействия и управления полезной нагрузкой. Сервопривод 53 с помощью кабелей и разъемов подключен к модулю командно-измерительной системы и командно-телеметрической радиолинии, размещенной в корпусе 4.
Возможен второй вариант выполнения контейнера 5 с шарнирным соединением (фиг. 25-29), обеспечивающим сброс полезной нагрузки с примерными габаритами 230х50х50 мм из контейнера по управляющему сигналу с модуля командно-измерительной системы и командно-телеметрической радиолинии. В данном варианте выполнения верхняя П-образная пластина 45 имеет шарнирное соединение 54 с нижней пластиной 46. П-образная пластина выполнена с боковой панелью 55, предназначенной для размещения сервопривода 53 и подвижной пластины 56. При этом подвижная пластина 56 выполнена с возможностью перемещения по направляющим, например, с помощью продольных пазов 57, которыми снабжена пластина 56, и штырей (не чертеже не показаны), закрепленных на боковой панели 55. Подвижная пластина 56 также снабжена выступающей частью 58, расположенной в плоскости пластины, в исходном положении выходящей за пределы передней панели П-образной пластины, а также втулкой 59, размещенной в центральной части пластины перпендикулярно ее плоскости. На боковой панели 55 также размещен рычаг 60, закрепленный на сервоприводе 53, и выполненный с возможностью возвратно-поступательного перемещения пластины по панели в продольном направлении (по направляющим). Рычаг 60 состоит из двух шарнирно соединенных звеньев, свободный конец одного звена жестко соединен с сервоприводом 53, свободный конец второго звена - соединен шарнирно с подвижной пластиной 56. Кроме того, контейнер также снабжен еще одним подпружиненным рычагом 61, закреплённым шарнирно на передней панели П-образной пластины, выполненным с возможностью взаимодействия, с одной стороны - с выступающей частью 58 подвижной пластины 56 через выполненный в рычаге паз 62, с другой стороны - с полезной нагрузкой при повороте рычага 61 вокруг оси, расположенной перпендикулярно передней панели П-образной верхней пластины 45. В частности, рычаг 61 может быть использован для фиксации предохранительной планки на выступающей части полезной нагрузки в транспортном положении и ее расфиксации по сигналу с полетного контроллера.
Как было упомянуто выше, нижняя пластина 46 с одной из сторон имеет шарнирное соединение 54 с верхней П-образной пластиной 45, при этом с противоположной стороны снабжена боковым фигурным выступом 63 со стороны размещения подвижной пластины 56, который снабжен протяженным продольным пазом 64, сконфигурированным с возможностью перемещения по нему втулки 59 подвижной пластины 56.
Подвижная пластина 56 при перемещении может находиться в трех положениях - исходном, промежуточном и конечном. В исходном положении полезная нагрузка зафиксирована в контейнере 5, нижняя пластина 46 зафиксирована в положении «закрыто», при котором втулка 59 подвижной пластины 56 размещена в пазу 64 бокового фигурного выступа 63 нижней пластины 46, а выступающая часть 58 подвижной пластины 56 размещена в пазу 62 второго подпружиненного рычага 61. В промежуточном положении подвижной пластины нижняя пластина 46 зафиксирована в положении «закрыто», при этом втулка 59 подвижной пластины 56 еще размещена в пазу 64 бокового фигурного выступа 63 нижней пластины 46, при этом выступающая часть 58 подвижной пластины 56 находится вне паза 62 второго подпружиненного рычага 61. При данном положении подвижной пластины второй рычаг 61 под действием пружины (не чертежах не показано) поворачивается, обеспечивая взаимодействие с полезной нагрузкой. При перемещении из промежуточного в конечное положение втулка 59 подвижной пластины 56 выходит из паза 63 бокового фигурного выступа 62 нижней пластины 46, в результате чего нижняя пластина 46 под действием своего веса и веса полезной нагрузки поворачивается на шарнирах 54, обеспечивая сброс полезной нагрузки. Сервопривод 53 с помощью кабелей и разъемов подключен к модулю командно-измерительной системы и командно-телеметрической радиолинии.
Возможно использование второго варианта с различными модификациями, например, как показано на фиг. 30-34. В данном варианте контейнер 5 выполнен аналогично предыдущему варианту, при этом без использования второго рычага 61, предназначенного для взаимодействия с полезной нагрузкой. В данной модификации нижняя пластина 46 выполнена с протяженной упорной планкой 65 для фиксации полезной нагрузки.
Возможен третий вариант выполнения контейнера 5 с шарнирным соединением (фиг. 35-39), обеспечивающим сброс полезной нагрузки с примерными габаритами 205х60х60 мм из контейнера по управляющему сигналу с модуля командно-измерительной системы и командно-телеметрической радиолинии. Данный вариант аналогичен второму варианту, при этом дополнительно в верхней части контейнера 5 установлена плата 66 управления полезной нагрузкой, защищенная крышкой от механических воздействий, выполненной в форме П-образного профиля с боковыми вырезами, и сервопривод 53 для управления поступательным движением подвижной пластины для сброса полезной нагрузки. Плата 66 управления соединена с помощью кабеля и разъема с полезной нагрузкой для передачи управляющих сигналов, а также снабжена световыми индикаторами для отображения инициализации платы и информации о функционировании платы.
Сборку БВС осуществляют в следующей последовательности:
1. Сборка рамы 1 БВС и установка нижней части 16 корпуса 4
Перед сборкой Х-образной рамы 1 закрепляют электродвигатели 9 на лучах 2 при помощи винтового соединения и фиксируют провода электродвигателей 9 на них при помощи термоусадочной трубки. Затем закрепляют лучи 2 Х-образной рамы между двумя усиливающими пластинами 3, после чего устанавливают на них нижнюю часть 16 корпуса 4, и закрепляют первую деталь 27 кронштейна 6 для контейнера 5, предназначенного для размещения в нем полезной нагрузки. Деталь 27 прикрепляют с нижней стороны Х-образной рамы 1 к верхней усиливающей пластине 3.
2. Сборка силовой части БВС
На нижнюю часть корпуса БВС устанавливают сильноточную плату 36 на специально заготовленную площадку, после чего к ней при помощи паяного соединения подключают электродвигатели, а также силовой провод, который устанавливают в тыльной зоне нижней части корпуса 4.
3. Установка слаботочной платы, командно-телеметрической радиолинии, видеопередающего модуля и камеры
На посадочные места сильноточной платы устанавливают демпфирующие стойки, поверх которых устанавливают слаботочную плату 36. В передней зоне БВС устанавливают серводвигатель 43, на который при помощи специального кронштейна крепят видеокамеру 11. В тыльной части корпуса 4 устанавливают при помощи пластиковых хомутов видеопередающий модуль 37 и приемопередающий модуль 41 командно-телеметрической радиолинии, и в тыльную зону корпуса 4 выводят крепления под антенны. Далее при помощи паяных соединений данные элементы подключают к слаботочной плате. После чего данную плату при помощи специализированного шлейфа подключают к сильноточной плате.
4. Установка верхней части корпуса
На верхнюю часть корпуса 4 устанавливают крепления под аккумуляторы 34, например, в виде уголковых элементов 34 с продольными прорезями, и воздухозаборники 7, после чего верхнюю часть корпуса соединяют с нижней при помощи винтового соединения.
5. Установка пропеллеров и антенн
После установки второй части корпуса на электродвигатели устанавливают пропеллеры 10 (согласно схеме вращения) и устанавливают дипольную антенну 12 и всенаправленную антенну 13.
6. Установка контейнера с полезной нагрузкой в БВС и аккумулятора
Контейнер 5 с полезной нагрузкой, содержащий размешенную на его поверхности вторую деталь 28 кронштейна 6 в виде Г-образной фигурной пластины, прикрепляют к БВС с его нижней стороны, при этом зубцы 31 пластины 28 заводят в ответные продольные сквозные пазы 29 первой детали 27, выполненной в виде П-образной пластины, прикрепленной к БВС. После чего совмещают две детали - 27 и 28 до сопряжения с их передних панелей с последующей дополнительной фиксацией винтовым соединением через отверстие 32.
Беспилотный летательный аппарат мультироторного типа используют следующим образом.
Первоначально устанавливают необходимую полезную нагрузку в контейнер 5, размещая ее в отверстиях 47, и подключают ее в специализированный разъем (фиг. 14) 39. После установки полезной нагрузки включают аппаратуру управления, удержанием кнопки включения. Затем закрепляют аккумуляторную батарею на беспилотном летательном аппарате, и подключают силовой разъем 38 аккумуляторной батареи к БВС. Управление аппаратом ведется от третьего лица, при помощи наземной станции управления или от первого лица, при помощи наземной станции управления и системы видеопередачи. Оператор осуществляет действия с полезной нагрузкой при помощи тумблера на наземной стации управления.
Беспилотный летательный аппарат работает следующим образом:
Радиосигнал с наземной станции управления принимается дипольной антенной и поступает на приемопередающий модуль 41 БВС, в котором обрабатывается и передается по интерфейсу UART в полетный контроллер, расположенный на одной из плат модуля 36. Сигналы с датчиков гироскопа, акселерометра, барометра, компаса, GPS, и т.д. также поступают в полетный контроллер. В полетном контроллере производится обработка всех поступивших сигналов по заданным программным алгоритмам с формированием управляющих сигналов, которые через силовые электронные компоненты - регулятор оборотов, электронные ключи и т.д. передаются на исполнительные устройства - электродвигатели, сервоприводы и т.д. Также, полетный контроллер формирует телеметрическую информацию о состоянии БВС (напряжение питания, температура воздуха и др.) и его полетных характеристиках (высота, скорость, направление полета, положение в пространстве и др.) для дальнейшей ее передачи через приемопередающий модуль на наземную станцию.
Видеокамера преобразует полученное изображение в сигнал, который дополняется телеметрической информацией о состоянии БВС с полетного контроллера по интерфейсу SPI и с помощью видеопередающего модуля 37 передается на приемный модуль оператора БВС (наземную станцию управления).
Взаимодействие с полезной нагрузкой, размещенной в контейнере, и/или с узлами (элементами) контейнера, осуществляется путем передачи с наземной станции управления радиосигнала ШИМ определенной скважности, который поступает на дипольную антенну БВС, обрабатывается в полетном контроллере и через электронные компоненты (электронные ключи) поступает на исполнительные механизмы, осуществляющие непосредственное взаимодействие с полезной нагрузкой и/или контейнером - например, открытие контейнера для сброса полезной нагрузки, отсоединение и сброс полезной нагрузки, изменение состояния полезной нагрузки, и др.
Разработанное БВС характеризуется улучшенными эксплуатационными характеристиками, включая снижение тепловой нагрузки на электронные компоненты, в т.ч., за счет установки воздухозаборников и диффузоров для принудительного охлаждения электронных компонентов внутри корпуса. Кроме того, разработанное БВС имеет конструкцию, характеризующуюся простотой и удобством его сборки, повышенной прочностью несущей конструкции. Повышение дальности действия видеосвязи и радиоуправления достигается оптимальным сочетанием частот приемо-передающих устройств, антенн БВС и наземной станции управления, полученным в результате ряда полетных тестов.
Пример конкретного выполнения
Изготовленные варианты БВС представлены на фиг. 1-39. Корпус БВС изготовлен из специального сплава Амг3М, лучи Х-образной рамы выполнены из стеклотекстолита. В качестве источника питания БВС использованы литий-ионный или литий-полимерный аккумуляторы.
Процесс ручной сборки беспилотного летательного аппарата занял примерно 2 часа, в то время как сборка аналогов составляла 4 и более часов. Изготовленные варианты БВА имели воздухозаборники, которые обеспечивали снижение тепловой нагрузки на электронные компоненты, что позволяло совершать полеты при температуре внешней среды 45 градусов Цельсия и выше. Проведенные испытания БВС при указанных условиях продемонстрировали его бесперебойную работу. Изготовленные варианты БВС имели кронштейн, который обеспечивал надежное крепление контейнера с полезной нагрузкой к БВС менее чем за одну минуту.
Изготовленные БВС имели габариты 330х330х65 мм в транспортировочном положении и 520х520х250 мм в рабочем положении, вес от 3,5 кг до 6,2 кг без учета полезной нагрузки. В процессе испытаний БВС продемонстрировали свою эффективность по доставке полезной нагрузки весом от 0,8 кг до 3,5 кг, время нахождения аппаратов в воздухе с полезной нагрузкой 3,5 кг составляло от 12 до 15 минут, без полезной нагрузки от 25 до 30 минут, а максимальное удаление от наземной базовой станции достигало 10 км.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ОХРАНЫ МЕСТНОСТИ С ПРИМЕНЕНИЕМ БЕСПИЛОТНОГО ВОЗДУШНОГО СРЕДСТВА | 2024 |
|
RU2834502C1 |
| Устройство видеонаблюдения беспилотного воздушного судна, узел видеокамеры для такого устройства видеонаблюдения | 2023 |
|
RU2802978C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| КОСМИЧЕСКИЙ АППАРАТ, ЕГО МОДУЛЬ ПОЛЕЗНОЙ НАГРУЗКИ И МОДУЛЬ СЛУЖЕБНЫХ СИСТЕМ | 2016 |
|
RU2617162C1 |
| Беспилотный летательный аппарат для определения содержания питательных веществ растений в почве | 2024 |
|
RU2827242C1 |
| УЧЕБНЫЙ НАБОР-КОНСТРУКТОР ДЛЯ ИЗУЧЕНИЯ КОНСТРУКЦИИ И АЭРОДИНАМИКИ ПОЛЁТА МУЛЬТИРОТОРНОГО БЕСПИЛОТНОГО АППАРАТА | 2024 |
|
RU2836491C1 |
| Способ многофункциональной аэросъемки на основе беспилотных воздушных судов для планирования и сопровождения сейсморазведочных работ и многофункциональный аппаратно-программный комплекс для его реализации | 2021 |
|
RU2779707C1 |
| БЕСПИЛОТНАЯ АВИАЦИОННАЯ СИСТЕМА | 2020 |
|
RU2741854C1 |
| МОДУЛЬНЫЙ БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2023 |
|
RU2816463C1 |
| Беспилотный летательный аппарат для отбора почвенных образцов | 2024 |
|
RU2828894C1 |
Изобретение относится к области авиации, в частности к конструкциям мультикоптеров. Беспилотное воздушное судно (БВС) мультироторного типа для транспортировки малогабаритных грузов включает Х-образную раму, содержащую лучи, соединенные с усиливающей пластиной, корпус с размещенными в нем электронными узлами и компонентами, закрепленный на Х-образной раме. Корпус снабжен воздухозаборниками и диффузором формирования воздушного потока для охлаждения электронных узлов и компонентов. Корпус состоит из двух частей - верхней части, выполненной в виде крышки, и нижней, представляющей собой монтажное основание для крепления электронных узлов и компонентов. БВС содержит электродвигатели с пропеллерами, закрепленные на лучах Х-образной рамы, контейнер для размещения полезной нагрузки. Узел крепления контейнера к корпусу выполнен в виде кронштейна, содержащего две детали, первая из которых прикреплена к нижней части корпуса и выполнена в виде П-образной пластины, снабженной продольными сквозными пазами, и крепежными площадками, а вторая деталь закреплена на контейнере и выполнена в виде Г-образной пластины с двумя выступами. Обеспечивается повышение надежности БВС, снижение тепловой нагрузки на электронные компоненты. 10 з.п. ф-лы, 39 ил.
1. Беспилотное воздушное судно мультироторного типа (БВС) для транспортировки малогабаритных грузов, включающее:
Х-образную раму, содержащую лучи, соединенные с усиливающей пластиной, расположенной в центральной части рамы,
корпус с размещенными в нем электронными узлами и компонентами, закрепленный на Х-образной раме, снабженный воздухозаборниками и диффузором, расположенными на боковых поверхностях корпуса с возможностью формирования направленного воздушного потока внутрь корпуса для охлаждения электронных узлов и компонентов, при этом корпус состоит из двух частей – верхней части, выполненной в виде крышки, и нижней, представляющей собой монтажное основание для крепления электронных узлов и компонентов;
электродвигатели с пропеллерами, закрепленные на лучах Х-образной рамы,
контейнер для размещения полезной нагрузки;
узел крепления контейнера к корпусу, выполненный в виде кронштейна, содержащего две детали, первая из которых прикреплена к нижней части корпуса и выполнена в виде П-образной пластины, снабженной продольными сквозными пазами и крепежными площадками, а вторая деталь закреплена на контейнере и выполнена в виде Г-образной пластины, снабженной двумя протяженными выступами, сконфигурированными с возможностью размещения и фиксации в продольных сквозных пазах первой детали;
узел крепления аккумулятора, закрепленный на корпусе.
2. Беспилотное воздушное судно по п.1, характеризующееся тем, что электронные узлы и компоненты включают: модуль командно-телеметрической радиолинии, выполненный с возможностью приема управляющего сигнала и передачи информации о качестве соединения на наземную станцию управления при помощи дипольной антенны с функцией псевдослучайной перестройки рабочей частоты (ППРЧ) и содержащий полетный контроллер; видеокамеру, видеопередающий модуль, выполненный с возможностью преобразования видеоизображения с видеокамеры в радиосигнал определенной частоты, передаваемый на всенаправленную антенну; а также узел удаленного управления полезной нагрузкой.
3. Беспилотное воздушное судно по п.2, характеризующееся тем, что содержит GPS-модуль, установленный с внешней стороны от корпуса, подключенный к полетному контроллеру для получения координат, скорости перемещения и информации о маршруте, при этом модуль размещен в защитном кожухе, выполненном из радиопрозрачного материала.
4. Беспилотное воздушное судно по п.2, характеризующееся тем, что монтажное основание корпуса выполнено в виде Г-образной профилированной пластины, имеющей нижнюю панель, снабженную кронштейнами для крепления видеокамеры и дипольной антенны, окном для фото-видеосъемки видеокамерой, и заднюю панель, снабженную отверстиями для размещения разъемов, отверстиями для фиксации крышки, при этом видеокамера снабжена сервоприводом; при этом кронштейн для дипольной антенны, дипольная антенна и видеокамера выполнены с возможностью поворота в продольной плоскости, перпендикулярной монтажному основанию.
5. Беспилотное воздушное судно по п.2, характеризующееся тем, что крышка корпуса выполнена в виде профилированной детали, имеющей переднюю панель, снабженную перфорацией для поступления встречного воздушного потока внутрь корпуса и вырезом для видеокамеры с возможностью изменения направления фотовидеосъемки, и боковые панели, на которых расположены воздухозаборники и диффузоры симметрично относительно продольной оси корпуса.
6. Беспилотное воздушное судно по п.1, характеризующееся тем, что в вертикальных сопрягаемых элементах Г-образной и П-образной пластин узла крепления контейнера к корпусу выполнены отверстия для фиксации пластин между собой.
7. Беспилотное воздушное судно по п.1, характеризующееся тем, что протяженные выступы второй детали узла крепления контейнера к корпусу имеют Г-образную конфигурацию, снабжены скошенными кромками.
8. Беспилотное воздушное судно по п.1, характеризующееся тем, что лучи Х-образной рамы выполнены в виде полых протяженных элементов с П-образным, округлым или прямоугольным профилем поперечного сечения с возможностью размещения электрических проводов для подачи тока к электродвигателям, размещены в полости лучей.
9. Беспилотное воздушное судно по п.1, характеризующееся тем, что лучи Х-образной рамы выполнены в виде протяженных прямоугольных или округлых элементов, при этом электрические провода для подачи тока к электродвигателям размещены по внешней поверхности лучей и закреплены на них с использованием термоусадочного материала или полимерных хомутов.
10. Беспилотное воздушное судно по п.1, характеризующееся тем, что содержит складные опоры, в транспортном положении выполненные с возможностью размещения вдоль лучей Х-образной рамы.
11. Беспилотное воздушное судно по п.1, характеризующееся тем, что узел крепления аккумулятора выполнен в виде жестко закрепленных на верхней части корпуса уголковых элементов с продольными прорезями для размещения в них фиксирующих ремней.
| Беспилотный летательный аппарат для транспортировки компонентов крови | 2022 |
|
RU2791340C1 |
| WO 2020092179 A1, 07.05.2020 | |||
| БЕСПИЛОТНАЯ ЛЕТАЮЩАЯ ПЛАТФОРМА ВЕРТОЛЕТНОГО ТИПА ДЛЯ ПОЖАРОТУШЕНИЯ | 2022 |
|
RU2781919C1 |
| WO 2018063076 A1, 05.04.2018 | |||
| УСТРОЙСТВО ДЛЯ ПОДВЕСА ГРУЗА | 2022 |
|
RU2797076C1 |

