Область техники, к которой относится изобретение
Изобретение относится к области малогабаритных беспилотных авиационных устройств вертикального взлета и посадки (квадрокоптеров), предназначенных для аэрофотографирования и воздушного наблюдения с возможностью передачи информации, получаемой бортовыми датчиками, на наземную станцию управления в реальном масштабе времени.
Уровень техники
В настоящее время широкое распространение получили беспилотные авиационные устройства вертикального взлета и посадки мультироторного типа. Наибольшее распространение получили модели с четырьмя несущими винтами - квадрокоптеры. Они применяются как в бытовой сфере, в качестве игрушек, так и в профессиональной для проведения видеосъемки или видеонаблюдения, доставки грузов и т.д. Профессиональные квадрокоптеры могут достигать взлетной массы от нескольких килограмм до десятков килограмм и размеров (без учет винтов) более 1-1,5 метра. Такие габариты и масса предъявляют повышенные требования к прочности конструкции квадрокоптера. Вместе с тем относительно небольшое время полета квадрокоптеров - как правило не более одного часа - заставляет осуществлять запуск беспилотных летательных аппаратов в непосредственной близости от района выполнения поставленной задачи, что требует транспортировки квадрокоптера. В собранном виде квадрокоптеры имеют довольно большие габариты и, главное, весьма сложную и непрочную внешнюю форму, резко ограничивающую возможность их транспортировки в собранном виде из-за опасности повреждения и неудобных габаритов. Поэтому эти системы, как правило, разворачивают и приводят в рабочее состояние непосредственно в районе применения.
Поэтому для таких устройств очень важны характеристики процессов сборки для хранения или транспортировки и разворачивания для работы, которые должны быть простыми, надежными, а используемые для их реализации устройства желательно с небольшой массой. Многие производители квадрокоптеров создали различные разборные или складные конструкции. Самая распространенная конструкция квадрокоптера содержит корпус и четыре несущих корпус луча, внутренние концы которых прикреплены к корпусу, а на внешних концах которых, размещенных по углам квадрата вокруг корпуса, установлены электродвигатели с винтами. Наиболее известным примером такой конструкции является квадрокоптер Tarot Х4 для профессиональной аэрофотосъемки производства китайской фирмы Tarot. Она подробно описана в интернете в многочисленных файлах, например, в Tarot Х4 http://www.tarotrc.com/index.php?main_page=product_info&cPath=65_66&products_id=1289. Там же приведены номера нескольких китайских патентов (№№2014204282854, 2014203682366, 2034302624585, 2014301541104, 2014302583208), относящихся к способу сложению и развертыванию лучей квадрокоптера. Указанное устройство наиболее близко к заявляемому по большинству существенных признаков, поэтому оно выбрано в качестве прототипа. Этот квадрокоптер, содержащий корпус состоящий из двух параллельных пластин, между которыми втулками на осях установлены внутренние концы четырех лучей, внешние концы которых с электромоторами и винтами размещены по углам квадрата вокруг корпуса, причем скрепления лучей с корпусом выполнены возможностью их сложения для удобного хранения и транспортировки. Как отмечено выше важная отличительная характеристика этого квадрокоптера - прототипа - возможность складывания «зонтиком» (то есть в вертикальной плоскости) его лучей в нерабочем положении системы (хранение, транспортировка) и оперативного разворачивания его лучей в рабочем положении системы. Для этого в его конструкции сделано следующее. На внутренних концах лучей имеются горизонтально распложенные втулки, которые надеты на оси, прикрепленные к краям пластин корпуса квадрокоптера. Лучи могут поворачиваться на этих осях в вертикальной плоскости, что позволяет складывать их рядом вертикально вплотную друг к другу при хранении, транспортировке и разворачивать в четыре стороны и жестко фиксировать лучи в рабочем положении квадрокоптера. В верхней точке поворот лучей ограничен уровнем верхней пластины корпуса, в нижней - перпендикуляром к плоскости корпуса. Для фиксации лучей в верхнем положении (при развертывании лучей квадрокоптера) на краях пластины корпуса установлены держатели защелок, которые зацепляют за выступы, выполненные на внутренних концах лучей. Этими защелками лучи закрепляют в развернутом положении и предотвращают их повороты в рабочем положении квадрокоптера.
Описанный механизм складывания, развертывания и фиксации положения лучей довольно прост. Но он имеет существенный недостаток, особенно для профессиональных квадрокоптеров. Квадрокоптер поднимется вверх и удерживается в воздухе за счет вращения винтов, установленных на концах внешних частей четырех лучей, расположенных по квадрату на максимальном удалении от корпуса, в котором установлена полезная нагрузка квадрокоптера (видеокамеры, приемники, передатчики, магнитофоны и другая аппаратура). Корпус с полезной нагрузкой тянет квадрокоптер вниз. Таким образом, лучи с винтами и корпус с полезной нагрузкой тянут части квадрокоптера в разные стороны. Эти тяги образуют рычаг, плечи которого соединены в месте прикрепления и фиксации внешних частей лучей квадрокоптера к его корпусу. При этом присоединение осуществлено насадкой втулок лучей на оси корпуса, расположенные на краях пластин корпуса, а фиксация произведена защелками, держатели которых прикреплены к краю корпуса. Держатели зацеплены за специальные выступы, сделанные на концах лучей вблизи корпуса. При такой конструкции квадракоптера вся нагрузка корпуса с нагрузкой при его полете приложена к защелкам, которыми скреплены корпус с лучами. Защелка должна быть прочной, чтобы выдержать вес корпуса с нагрузкой. Однако ее прочность существенно зависит и от прочности установки держателей защелок на корпусе и от прочности специальных выступов для защелок на концах лучей вблизи корпуса. Указанные прочности установки держателей и выступов реально недостаточны, поскольку обе части защелки установлены почти рядом на самых краях пластины корпуса и луча. Поэтому фактически вся нагрузка при полете квадрокоптера давит на защелку и две близко расположенные непрочные опоры, между которых она закреплена. Такое положение определяет слабое сопротивление этого скрепления к давлению сверху. Соответственно, это ограничивает грузоподъемность квадрокоптера, особенно при использовании в системах с большим полезным весом. Надо учесть также, что размещение горизонтальных осей для лучей в этой конструкции возможно только на самом краю пластин корпуса, чтобы лучи могли поворачиваться вниз для складывания в нерабочем положении квадрокоптера. Такое размещение соединения втулок лучей с горизонтальными осями корпусом на самом краю пластины ненадежно в рабочем положении квадроокоптера при наличии нагрузки.
Кроме того, габариты квадрокоптера в положении хранения и транспортировки (то есть со сложенными лучами) желательно уменьшить, учитывая обычный режим частой транспортировки системы
Задача изобретения
Задача изобретения - повысить прочность скрепления лучей квадрокоптера с его корпусом и их фиксации при сохранении простоты развертывания лучей в рабочее положение и их сложения в нерабочее положение, а также повысить компактность квадрокоптера в нерабочем положении.
Сущность изобретения
Сущность изобретения состоят в том, что в известную конструкцию складного квадрокоптера, содержащего корпус квадратовидной формы, состоящий из двух параллельных пластин, между которыми втулками на осях установлены внутренние концы четырех лучей - держателей электродвигателей с винтами, внешние концы лучей с электромоторами и винтами размещены по углам квадрата вокруг корпуса, причем скрепления лучей с корпусом выполнены возможностью их сложения для удобного хранения и транспортировки внесены существенные изменения, а именно:
лучи квадрокоптера в положении хранения и транспортировки складываются не в вертикальной, а в горизонтальной плоскости, для чего:
- втулки на внутренних концах лучей выполнены вертикально, эти лучи надеты втулками на вертикальные оси, установленные между пластинами корпуса квадрокоптера вблизи его центра,
- две пары вертикальных осей размещены на пластинах корпуса симметрично относительно продольной оси корпуса, проходящей посередине между одинаковыми краями пластин, при этом оси первой пары установлены вблизи центра корпуса симметрично относительно продольной оси корпуса на расстоянии между собой на 0,5-1,0 мм больше диаметра луча, а оси второй пары установлены симметрично относительно продольной оси корпуса на расстоянии между собой на 0,5-1,0 мм больше двойного диаметра луча и на расстоянии каждой из них от ближайшей оси первой пары осей на 3-5 мм больше диаметра луча,
- на всех четырех углах обоих пластинах корпуса, установлены выступы, наружные поверхности которых выполнены выпукло скругленными, а внутренние поверхности, обращенные друг к другу, выполнены плоскими, причем расстояние между выступами на 0,5-1,0 мм больше диаметра луча,
- на каждом луче на расстоянии 1-2 мм перед внешним концом выступа жестко установлен стопор с резьбой, диаметр которого меньше расстояния между пластинами корпуса,
- на каждом луче между стопором с резьбой и электродвигателем размещена свободно ' перемещаемая конусная гайка с направленной в сторону корпуса расширяющейся конусной частью без резьбы, конус сужен к резьбовой части конусной гайки, резьба которой адекватна резьбе стопора с резьбой,
- внутренний диаметр самой широкой части конуса конусной гайки больше на 0,5-1,0 мм расстояния между внешними сторонами выступов корпуса, внутренний диаметр самой узкой части конуса конусной гайки на 0,5-1,0 мм меньше суммы диаметра луча и двойной толщины выступа,
- на внутреннем конце каждого луча между пластинами корпуса может быть жестко закреплен упор, размер которого на 0,5-1,0 мм меньше расстояния между пластинами корпуса.
В процессе развертывания квадрокоптера в рабочее положение лучи поворачивают вокруг вертикальных осей, расположенных вблизи центра корпуса устанавливают напротив выступов корпуса и фиксируют посредством закручивания конусных гаек на резьбу на стопорах. Выступы корпуса установлены на самых краях пластин корпуса, они под давлением надвигающегося на них конусов конусных, гаек слегка, (порядка 0,5 мм) сгибаются вовнутрь, навстречу друг другу, плотно упираясь при этом в лучи, находящиеся между пластинами корпуса. Это плотно прижимает выступы корпуса к лучам, жестко фиксируя положение луча. Лучи в предложенной конструкции зажаты между осями пластин и пластинами корпуса в отличие от прототипа, в котором лучи крепились к горизонтальным осям на самом краю пластин корпуса. Вертикальное положение осей укрепляет сопротивление лучей внешнему давлению. Прочность конструкции дополнительно поддерживают упоры высотой на 0.5 мм меньше расстояния между пластинами, размещенные на внутренних концах лучей между его пластинами. Так как оси вращения лучей расположены значительно ближе к центру корпуса - внутренние концы лучей глубже входят в корпус. Это делает их соединение с корпусом гораздо прочнее, чем в прототипе, Перечисленные выше изменения конструкции упрочили скрепление лучей с корпусом и уменьшило нагрузку на него, что повысило грузоподъемкость и надежность устройства в целом. Это позволило увеличить вес полезной нагрузки, то есть повысить эффективность работы квадрокоптера. Время полета квадрокоптера возросло до 1 часа (против 18 минут у прототипа) - за счет применения более мощной аккумуляторной батареи.
В нерабочем положении квадрокоптера (хранение, перевозка) конусные гайки отвинчены, освободившиеся от скрепления с корпусом лучи попарно повернуты в горизонтальной плоскости в разные стороны вокруг осей до взаимного касания.
Кроме того, сложение всех лучей квадрокоптера в одной (горизонтальной) плоскости повысило его компактность в сложенном виде.
Таким образом, технический эффект изобретения состоит в повышении прочности сцепления лучей квадрокоптера с его корпусом, повышении его грузоподъемности и компактности квадрокоптера в сложенном для хранения виде.
Перечень фигур
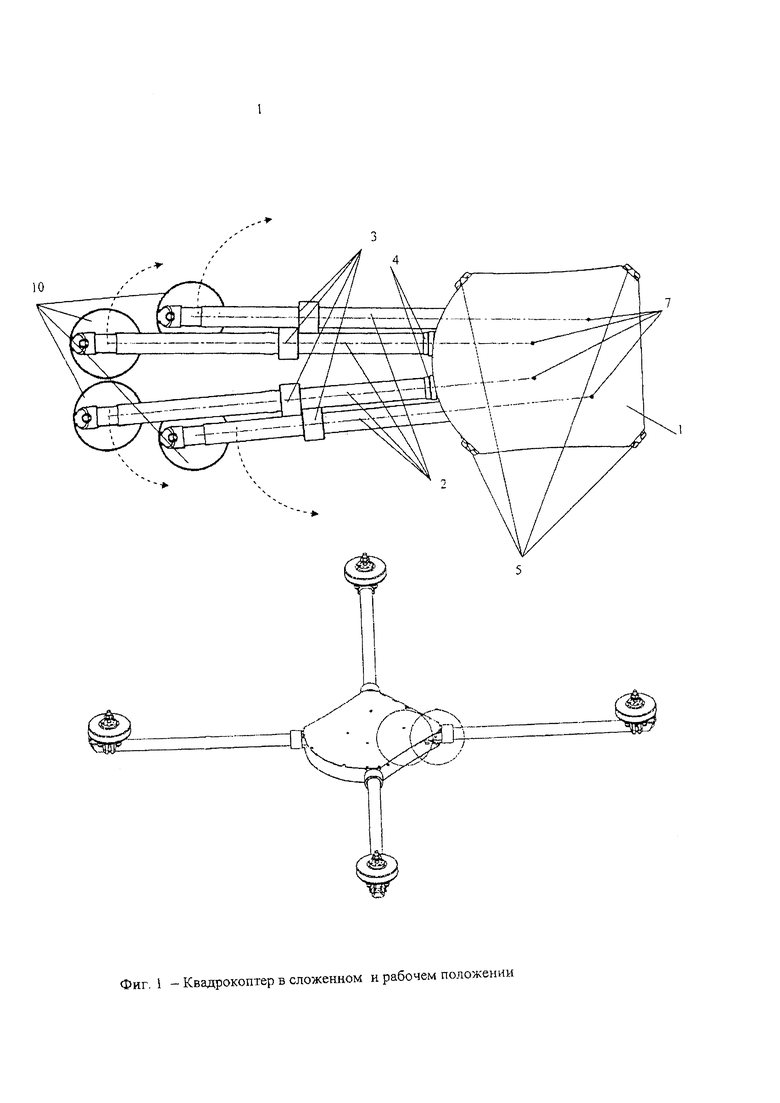
Фиг. 1 - Квадрокоптер в сложенном и рабочем положении
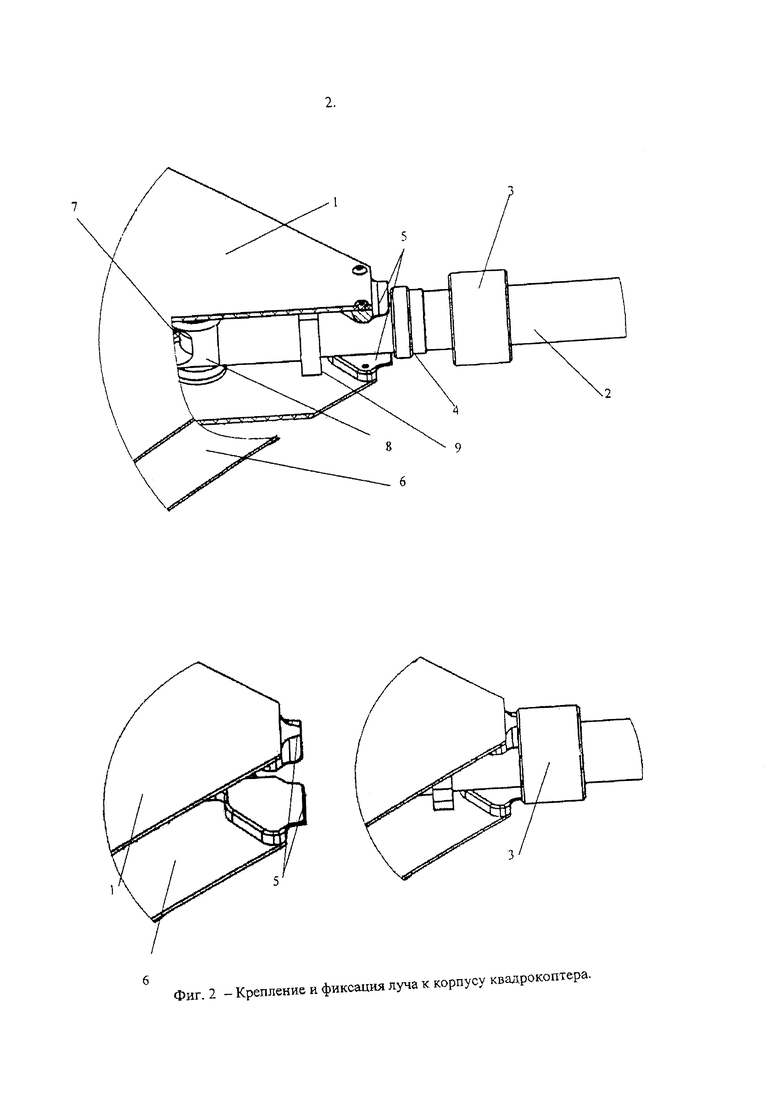
Фиг. 2 - Крепление и фиксация луча к корпусу квадрокоплета
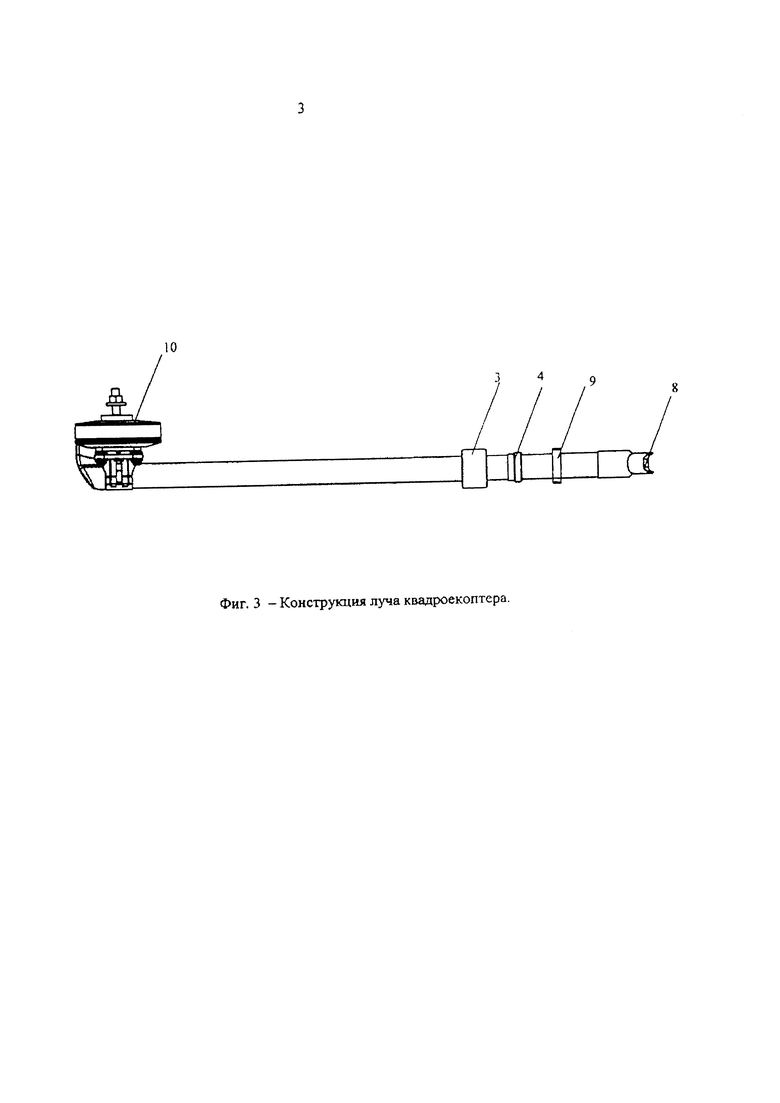
Фиг 3 - конструкция луча квадрокоптера
На фигурах приняты следующие обозначения 1 - верхняя пластина корпуса, 2 - лучи с двигателями, 3 - конусные гайки, 4 - стопоры с резьбой, 5 - выступы, 6 - нижняя пластина корпуса, 7 - оси крепления лучей, 8 - втулка на конце луча, 9 - упоры, 10 - двигатели.
Описание работы устройства
Корпус квадрокоптера состоит из двух параллельных пластин 1 и 6. Между пластинами.1 и 6 вертикально укреплены четыре оси 7, установленные между пластинами корпуса квадрокоптера вблизи его центра. Две пары вертикальных осей 7 размещены на пластинах корпуса симметрично относительно продольной оси корпуса, проходящей посередине между одинаковыми краями пластин, при этом оси первой пары установлены вблизи центра корпуса симметрично относительно продольной оси корпуса с расстоянием между собой, на 0,5-1,0 мм большим диаметра луча, а оси второй пары осей 7 установлены симметрично относительно продольной оси корпуса с расстоянием между собой, на 0,5-1,0 мм большим двойного диаметра луча, и на расстоянии каждой из них от ближайшей оси первой пары осей, на 3-5 мм большим диаметра луча. На обеих пластинах 1 и 6 четырех углов корпуса установлены выступы 5, наружные поверхности которых выполнены выпукло скругленными, а внутренние поверхности, обращенные друг к другу, выполнены плоскими, причем расстояние между ними больше диаметра луча на 0,5-1,0 мм. На каждом луче 2 перед внешним концом выступа 5 корпуса жестко закреплен стопор с резьбой 4, при этом внешний размер стопора меньше расстояния между пластинами 1 и 6 корпуса. На каждом луче 2 между стопором с резьбой 4 и двигателем 30 размещена свободно перемещаемая конусная гайка 3, имеющая спереди направленную в сторону корпуса расширяющуюся конусную часть без резьбы. Конус конусной гайки 3 сужается к резьбовой части конусной гайки, резьба которой совпадает с резьбой на стопоре с резьбой 4, внутренний диаметр самой широкой части конуса конусной гайки 3 больше на 1 мм расстояния между внешними сторонами выступов 5 корпуса, а внутренний диаметр самой узкой части конуса конусной гайки 3 меньше на 0,5-1,0 мм суммы диаметра луча и двойной толщины выступа 5, причем выпуклость выступа 5 согласована с формой конуса конусной гайки.
На каждом луче 2 могут быть расположены упор 9, стопор с резьбой 4 и свободно перемещающаяся конусная гайка 3. Упор 9 размером на 0,5-1,0 мм меньше расстояния между пластин корпуса жестко закреплен на луче 2 между пластинами 1 и 6 корпуса. Упор 9 вставлен для поддержания заданного расстояния между пластин корпуса при возможных аварийных ситуациях. Стопор с резьбой 4 жестко закреплен перед внешними концами выступов 5 корпуса. Поэтому при завинчивании резьбы конусной гайки, ее надвигают на выступ, прижимая его к лучу. Этим осуществляют точную установку и крепление лучей 2 к корпусу квадрокоптера. Затем на двигатели лучей 2 прикрепляют винты. Сборка квадрокоптера для работы закончена.
В сложенном положении лучи 2 расположены в одной плоскости параллельно друг другу (Фиг. 1). Для сборки квадрокоптера лучи поворачивают вокруг осей 7 в горизонтальной плоскости попарно в разные стороны между пластинами корпуса до совмещения с выступами 5 на корпусе. Направления поворота каждого луча указаны стрелками на фиг. 1.
Складной квадрокоптер перевозят в штатной упаковке. Упаковка - транспортировочный кейс (чемодан) в котором размещен сложенный летательный аппарат, снятые винты, полезная нагрузка и другое оборудование системы.
Промышленная применимость
Каркас устройства может быть выполнен из хорошо известных легких и прочных материалов, например, композитных. Предусмотренное изобретением взаимодействие средств реализуется в известных технологических процессах в области авиастроения и использования пилотируемых и беспилотных летательных аппаратов различного назначения. Квадрокоптер, реализующий заявляемое изобретение, был изготовлен и неоднократно экспериментально проверен в опытных партиях продукции предприятия-заявителя.
Квадрокоптер имеет вес в сборе до 9 кг (с полезной нагрузкой), максимальный размер (с учетом винтов) - более 2 м, время работы в воздухе - до 60 минут, скорость полета - 0-60 км/час, максимальный вес полезной нагрузки до 2 кг, время сборки 4-5 минут (с учетом установки полезной нагрузки).
Изобретение предназначено для использования в квадрокоптерах различного назначения. В состав комплекса обычно входит квадрокоптер с установленной на нем полезной нагрузкой (фотоаппаратом или видеокамерой видимого или ИК-диапазона на стабилизированной управляемой платформе). Обслуживание комплекса осуществляют техническим расчетом из двух человек с неподготовленных в инженерном отношении площадок при скорости ветра до 10 метров в секунду. Время подготовки к старту из походного положения - не более 15 минут. Время подготовки квадрокоптера к повторному вылету - не более 10 минут, в том числе на сборку квадрокоптера не более 5-и минут. Время зарядки бортовой аккумуляторной батареи - не более 2 часов.
При этом сборку и разборку устройства проводили начинающие работники невысокой квалификации, ранее не имевшие опыта применения беспилотных авиационных устройств. Испытуемые устройства многократно вывозили на многодневные натурные испытания, в том числе - в сельские некомфортные условия. Для сборки и разборки квадрокоптера используют только гаечный ключ для крепления винтов к двигателю. Конусные гайки имеют ребристые внешние стороны, поэтому они закручиваются и раскручиваются пальцами. В целом время сборки системы обученными работниками не превышает 5 минут и за время испытаний не было случаев неправильной сборки и развала квадрокоптера в ходе полетов. Разборка и транспортная упаковка вообще не выявили каких-либо проблем.
Таким образом, эксперименты подтвердили наше предположение о том, что предложенные нами механизмы скрепления лучей с корпусом и их фиксация достаточно надежны. Максимальный вес полезного груза квадрокоптера при прочихравных условиях стал заметно больше, время полета квадрокоптера увеличилось в три раза по сравнению с прототипом (за счет возможности установки аккумулятора большей емкости), конструкция креплений лучей к корпусу стала значительно прочнее. Надежность скрепления многократно подтверждена в ходе многомесячных длительных работ в сложных походных некомфортных условиях. При этом немаловажен факт, что объем, занимаемый квадрокоптером, при одинаковой с прототипом длине лучей и размерах корпуса, стал меньше примерно на треть.
| название | год | авторы | номер документа |
|---|---|---|---|
| Складной мультикоптер | 2022 |
|
RU2790211C1 |
| Беспилотный летательный аппарат вертолётного типа | 2022 |
|
RU2799689C1 |
| Беспилотный летательный аппарат вертолетного типа | 2022 |
|
RU2792460C1 |
| Квадрокоптер | 2020 |
|
RU2734680C1 |
| НАСАДКА ДОЖДЕВАЛЬНОГО АППАРАТА | 2023 |
|
RU2823847C1 |
| РЕГУЛИРУЕМАЯ ОПОРА ДЛЯ СТРЕЛКОВОГО ОРУЖИЯ И СПОСОБ СТРЕЛЬБЫ С ЕЁ ПРИМЕНЕНИЕМ | 2016 |
|
RU2631156C1 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА | 1993 |
|
RU2085701C1 |
| УСТРОЙСТВО ДЛЯ СМЕНЫ ЗАДВИЖЕК ПОД ДАВЛЕНИЕМ | 2015 |
|
RU2590698C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 1996 |
|
RU2115810C1 |
| УНИВЕРСАЛЬНЫЙ МНОГОФУНКЦИОНАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КВАДРОКОПТЕРНОГО ТИПА | 2024 |
|
RU2835704C1 |
Изобретение относится к области авиации, в частности к конструкциям многовинтовых летательных аппаратов. Квадрокоптер имеет корпус квадратовидной формы, состоящий из двух параллельных пластин, между которыми втулками на осях установлены внутренние концы четырех лучей - держателей винтов с двигателями. Внешние концы лучей с винтами размещены по углам квадрата вокруг корпуса, причем крепление лучей с корпусом выполнено с возможностью их сложения для хранения и переноски. Лучи квадрокоптера в положении хранения и транспортировки сложены в горизонтальной плоскости, для чего втулки внутренних концов лучей выполнены вертикально. Лучи надеты втулками на вертикальные оси, установленные между пластинами корпуса вблизи его центра. Две пары вертикальных осей размещены на пластинах корпуса симметрично относительно продольной оси корпуса. На всех четырех углах обеих пластин корпуса установлены выступы, перед внешними концами которых установлены стопоры с резьбой. Обеспечивается повышение прочности скрепления лучей квадрокоптера с его корпусом при сохранении, компактность квадрокоптера в нерабочем положении. 1 з.п. ф-лы, 3 ил.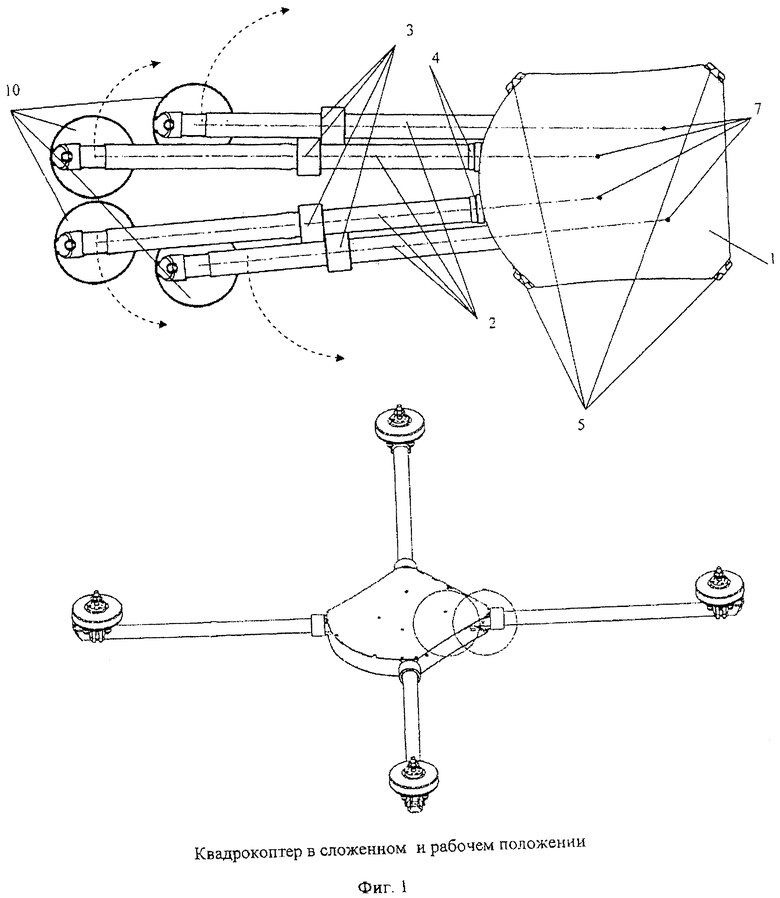
1. Складной квадрокоптер, содержащий корпус квадратообразной формы, состоящий из двух параллельных пластин, между которыми втулками на осях установлены внутренние концы четырех лучей - держателей двигателей с винтами, внешние концы лучей с электромоторами и винтами размещены по углам квадрата вокруг корпуса, причем скрепления лучей с корпусом выполнены с возможностью сложения лучей для удобного хранения и транспортировки, отличающийся тем, что для повышения прочности скрепления лучей квадрокоптера с его корпусом; повышения грузоподъемкости и компактности в сложенном положении, втулки на внутренних концах лучей размещены вертикально, лучи надеты втулками на вертикальные оси, установленные между пластинами корпуса квадрокоптера вблизи его центра, две пары вертикальных осей размещены на пластинах корпуса симметрично относительно продольной оси корпуса, проходящей посередине между одинаковыми краями пластин, при этом оси первой пары установлены вблизи центра корпуса симметрично относительно продольной оси корпуса с расстоянием между ними на 0,5-1,0 мм большем диаметра луча, а оси второй пары осей установлены симметрично относительно продольной оси корпуса с расстоянием между собой, на 0,5-1,0 мм большим двойного диаметра луча, и на расстоянии каждой из них от ближайшей оси первой пары осей, на 3-5 мм большим диаметра луча, на обеих пластинах четырех углов корпуса установлены выступы, наружные поверхности которых выполнены выпукло скругленными, а внутренние поверхности, обращенные друг к другу, выполнены плоскими, причем расстояние между ними больше диаметра луча, на каждом луче перед внешним концом выступа корпуса жестко закреплен стопор с резьбой, при этом внешний размер стопора меньше расстояния между пластинами корпуса, на каждом луче между стопором с резьбой и двигателем размещена свободно перемещаемая конусная гайка, имеющая спереди направленную в сторону корпуса расширяющуюся конусную часть без резьбы, конус конусной гайки сужается к резьбовой части конусной гайки, резьба которой совпадает с резьбой на стопоре, внутренний диаметр самой широкой части конуса конусной гайки больше расстояния между внешними сторонами выступов корпуса, а внутренний диаметр самой узкой части конуса конусной гайки меньше на 0,5-1,0 мм суммы диаметра луча и двойной толщины выступа, причем выпуклость выступа согласована с формой конуса конусной гайки.
2. Устройство по п. 1, отличающееся тем, что на внутреннем конце каждого луча между пластинами корпуса жестко закреплен упор размером на 0,5-1,0 мм меньше расстояния между пластинами корпуса.
| ХОЛОДИЛЬНЫЙ АППАРАТ И ИСПАРИТЕЛЬ ДЛЯ ХОЛОДИЛЬНОГО АППАРАТА | 2011 |
|
RU2529302C2 |
| АМОРТИЗАТОР-ПОДЪЕМНИК РЕГУЛИРУЕМЫЙ | 2002 |
|
RU2233393C2 |
| KR 1020150145853 A, 31.12.2015 | |||
| Ионизационный манометр | 1960 |
|
SU141669A1 |

