Настоящее изобретение относится к инструменту получения изображений для контроля целеуказания.
Указание на удаленную цель часто осуществляют при помощи светового луча, в частности, при помощи лазерного луча, чтобы самонаводящаяся ракета могла направляться к цели с повышенной точностью. По сути дела, световое пятно, создаваемое лучом на цели, служит ориентиром направления для ракеты: система обнаружения, установленная на самонаводящейся ракете, обнаруживает световое пятно, а система наведения ракеты удерживает ее траекторию в направлении светового пятна, пока ракета не достигнет цели. Следовательно, точность поражения цели самонаводящейся ракетой напрямую зависит от точности, с которой луч направляется и затем удерживается на цели. Для этого используют инструменты получения изображений, которые позволяют в реальном времени убеждаться, что пятно светового луча находится на цели. Такие инструменты позволяют одновременно наблюдать сцену, например, окружающий пейзаж, где находится цель, и световое пятно, создаваемое лучом целеуказания, на цели или вблизи нее. Когда наблюдение при помощи инструмента показывает, что световое пятно целеуказания не находится на выбранной цели, направление светового луча целеуказания можно скорректировать, чтобы вернуть световое пятно точно на цель.
Чаще всего инструмент снимает сцену, используя инфракрасное излучение, например, в интервале длины волны между 3 мкм (микрометр) и 15 мкм, а излучение луча целеуказания имеет длину волны, равную 1,06 мкм. В этом случае излучение целеуказания находится за пределами спектрального интервала излучения, которое используют для съемки изображения сцены. Применение инструментов с использованием инфракрасного излучения необходимо для достижения большой дальности целеуказания. В этом случае говорят о большом радиусе действия.
В дневное время или в условиях слабого освещения предусмотрено также применение луча целеуказания, который тоже имеет длину волны, равную 1,06 мкм, но с датчиками, которые являются чувствительными одновременно в видимой области и в ближней инфракрасной области, часто обозначаемой NIR (БИК) или которые являются чувствительными только в области БИК. По определению, область БИК соответствует интервалу длины волны, заключенному между 0,8 мкм и 1,5 мкм. Дальность действия систем, использующих эти инструменты, меньше, чем в случае систем, использующих инфракрасное излучение, длина волны которого составляет от 3 мкм до 15мкм, и в этом случае говорят о среднем радиусе действия.
В существующих инструментах первого типа изображение сцены и пятно луча целеуказания снимают при помощи датчиков изображений, которые являются чувствительными в двух разных интервалах длины волны. Однако при этом существует погрешность, что касается точности при последующем наложении друг на друга изображений, снятых раздельно двумя датчиками, чтобы оператор мог точно проверить место расположения пятна целеуказания внутри сцены. По этой причине желательно располагать инструментом контроля целеуказания, который использует единый датчик для съемки изображения сцены и одновременно для отображения пятна целеуказания на этом изображении сцены.
Такие другие инструменты, каждый из которых имеет единый датчик одновременно для съемки сцены и пятна целеуказания, тоже существуют. Но в изображении сцены, снятом этим единым датчиком, присутствует большой фотонный шум. По причине присутствия этого большого фотонного шума пятно целеуказания становится трудно различимым или почти невидимым внутри изображения сцены, когда цель находится на большом расстоянии от инструмента. Как правило, для приложений дальнего радиуса действия видимость пятна целеуказания становится недостаточной, когда цель удалена от инструмента более чем на 5 км (километров). Вместе с тем, существуют обстоятельства, которые требуют контролировать целеуказание с высокой надежностью, когда цель удалена по меньшей мере на 10 или 15 км от инструмента получения изображений, применяемого для контроля. Для так называемых приложений среднего радиуса действия видимость пятна может быть недостаточной, начиная с 2 км, в зависимости от атмосферных или рабочих условий.
В документах US 4,737,028 и US 2013/0112879 описаны такие инструменты для тепловой системы получения изображений и лазерного наведения, в каждом из которых используют только один матричный датчик изображения.
С учетом этой ситуации задачей изобретения является улучшение условий и повышение надежности контроля целеуказания, когда используемый инструмент контроля имеет только один датчик изображения. В частности, задачей изобретения является получение изображения пятна целеуказания при использовании такого инструмента с улучшенными контрастностью и/или отношением сигнала к шуму.
Изобретение призвано также объединить задачу такого улучшения с сохранением или улучшением простоты, скорости и удобства использования инструмента.
Для этого изобретением предложен новый инструмент получения изображений для контроля целеуказания, который содержит:
- объектив, выполненный с возможностью формирования изображения сцены при помощи первого излучения, называемого естественным излучением, которое обеспечивается элементами сцены, и таким образом, чтобы сформированное изображение содержало вклад, обеспечиваемый целью, содержащейся в сцене, причем этот вклад производится вторым излучением, называемым прицельным излучением, которое рассеивается целью в обратном направлении; и
- матричный датчик изображения, содержащий пиксельные элементы, каждый из которых является чувствительным одновременно к естественному излучению и к прицельному излучению, при этом датчик изображения расположен таким образом, чтобы снимать изображение, сформированное объективом.
Иначе говоря, заявленный инструмент является вышеупомянутым единым датчиком изображения. Действительно, снимаемое датчиком изображение представляет собой отображение сцены, в котором естественное излучение и прицельное излучение вместе участвуют в обеспечении появления внутри снятой сцены цели, освещаемой прицельным излучением.
Согласно изобретению, инструмент дополнительно содержит:
- фильтр, который перекрывает ограниченную зону датчика изображения, называемую зоной подтверждения, и выполнен с возможностью пропускать селективно на пиксельные элементы, содержащиеся в этой зоне подтверждения, прицельное излучение без естественного излучения или без части естественного излучения, спектрально отделенной от прицельного излучения.
Таким образом, когда инструмент ориентирован в сторону сцены таким образом, чтобы цель отображалась в зоне подтверждения датчика изображения, цель появляется на снятом изображении только за счет обратно рассеянного прицельного излучения или появляется на снятом изображении в основном за счет обратно рассеянного прицельного излучения, если цель меньше, чем зона подтверждения.
Если изображение пятна прицельного излучения на цели меньше, чем зона подтверждения, то это изображение пятна появляется на черном или темном фоне, поэтому оно отличается сильной контрастностью и, следовательно, хорошо просматривается.
Кроме того, в целом фильтр убирает фотонный шум естественного излучения в зоне подтверждения, поэтому в этой зоне остается только фотонный шум обратно рассеиваемого прицельного излучения. Однако фотонный шум обратно рассеянного прицельного излучения является более слабым, как правило, слабее по меньшей мере в четыре раза, чем фотонный шум естественного излучения на изображении сцены, поэтому пятно целеуказания проявляется более четко в зоне подтверждения.
Таким образом, когда оператор контроля целеуказания обнаруживает цель на изображении сцены, снятом датчиком изображения, этот оператор может переместить линию оптического визирования инструмента, повернув его, чтобы перевести изображение цели в зону подтверждения. При этом он может наблюдать пятно обратно рассеянного прицельного излучения внутри зоны подтверждения с более высокими контрастностью и отношением сигнала к шуму и проверить, таким образом, с большей уверенностью, находится ли это пятно точно на цели или смещено относительно этой цели. Такое перемещение линии визирования называют на профессиональном жаргоне изменением наводки, и оно представляет собой действие, которое является исключительно быстрым и простым для оператора, чтобы убедиться, что пятно целеуказания находится точно на цели.
Такой заявленный инструмент можно адаптировать, в частности, таким образом, чтобы длина волны естественного излучения, обнаруживаемого пиксельными элементами датчика изображения, составляла
- либо от 3 мкм до 15 мкм, и в этом случае длина волны прицельного излучения, которое тоже обнаруживают пиксельные элементы датчика изображения, составляет от 1,00 мкм до 1,10 мкм, и, в частности, может быть равной 1,064 мкм;
- либо от 0,36 мкм до 1,5 мкм, в этом другом случае с прицельным излучением, длина волны которого также составляет от 1,00 мкм до 1,10 мкм, и, в частности, может быть равной 1,064 мкм.
Предпочтительно фильтр, который перекрывает зону подтверждения датчика изображения, может быть интерференционным фильтром. В целом, этот фильтр имеет спектральное окно пропускания, которое содержит длину волны прицельного излучения, но которое исключает естественное излучение или по меньшей мере его часть.
Предпочтительно зона подтверждения, где находится фильтр на датчике изображения, может находиться вблизи периферического края матрицы пиксельных элементов или вблизи угла этой матрицы, или может быть смежной с этим краем или с этим углом матрицы. Таким образом, можно уменьшить помеху для оператора, которая может возникать в результате отсутствия изображения сцены, производимого естественным излучением внутри этой зоны подтверждения.
Изображение сцены, снимаемое датчиком изображения, может соответствовать полю оптического входа, которое имеет первый угловой размер, составляющий от 8 мрад (миллирадиан) до 80 мрад, и второй угловой размер, составляющий от 6 мрад до 60 мрад, причем этот второй размер измеряют перпендикулярно к первому размеру. В этом случае фильтр может иметь такие размеры, чтобы он соответствовал, через объектив, участку поля оптического входа, который имеет третий угловой размер, составляющий от 0,3 мрад до 3 мрад, когда этот третий размер измеряют параллельно первому размеру поля оптического входа, и который имеет четвертый угловой размер, тоже составляющий от 0,3 мрад до 3 мрад, когда этот четвертый размер измеряют параллельно второму размеру поля оптического входа.
Согласно первому варианту усовершенствования изобретения, которое называется автоматическим изменением наводки и применяется для инструмента по настоящему изобретению, инструмент может дополнительно содержать:
- систему ориентирования, выполненную с возможностью наложения миры визирования на снятое изображение в месте этого изображения, определяемом относительно датчика изображения; и
- устройство изменения наводки, выполненное с возможностью поворачивать инструмент на фиксированный угол изменения наводки таким образом, чтобы элемент сцены, отображенный на мире визирования до начала изменения наводки, отобразился в зоне подтверждения после изменения наводки.
Таким образом, оператору достаточно сначала направить линию оптического визирования инструмента таким образом, чтобы цель сначала появилась на мире визирования, затем привести в действие устройство изменения наводки таким образом, чтобы изображение цели было переведено непосредственно в зону подтверждения. В этом случае оператор видит на снятом изображении, находится ли пятно целеуказания в месте нахождения цели или вблизи от нее внутри отображаемой сцены. Такая процедура контроля целеуказания является более быстрой, более простой и более удобной для оператора, поскольку амплитуда и ориентация изменения наводки определены заранее.
Второе усовершенствование, применяемое, когда инструмент является инструментом с автоматическим изменением наводки, касается выравнивания миры визирования. Для этого инструмент может дополнительно содержать систему выравнивания, выполненную с возможностью коррекции положения миры визирования относительно датчика изображения таким образом, чтобы цель отображалась в центре зоны подтверждения, когда выполнено изменение наводки, если эта цель отображалась в центре миры визирования до начала изменения наводки.
В целом, заявленный инструмент получения изображений для контроля целеуказания может быть инструментом с внешним целеуказанием, то есть луч прицельного излучения для целеуказания генерируется источником, независимым от инструмента получения изображений.
В альтернативном варианте инструмент является так называемым инструментом с внутренним целеуказанием, когда источник прицельного излучения является частью инструмента или неподвижно с ним соединен. В этом случае инструмент дополнительно содержит:
- систему целеуказания, которая содержит лазерный блок, выполненный с возможностью генерировать луч прицельного излучения и ориентированный таким образом, чтобы направлять этот луч прицельного излучения на цель.
Когда инструмент является инструментом одновременно с внутренним целеуказанием и с автоматическим изменением наводки, предпочтительно он может быть выполнен таким образом, чтобы ориентация луча прицельного излучения относительно сцены была идентичной между первым моментом, в который элемент сцены отображается на мире визирования до начала изменения наводки, и вторым моментом, в который этот же элемент сцены отображается в зоне подтверждения, когда выполнено изменение наводки. Иначе говоря, операция изменения наводки ничего не меняет для целеуказания с помощью луча наведения. Согласно возможному варианту выполнения, устройство изменения наводки может быть выполнено с возможностью поворачивать одновременно объектив, датчик изображения и лазерный блок. Однако инструмент может дополнительно содержать систему компенсации, которая выполнена с возможностью удерживать луч прицельного излучения параллельно линии оптического визирования объектива и датчика изображения, пока изменение наводки не начато, и становится действующим после изменения наводки, чтобы компенсировать эффект изменения наводки для луча прицельного излучения. Для этого система компенсации может содержать:
- призматическую пластинку, прозрачную для луча прицельного излучения, с двумя плоскими гранями, которые образуют между собой фиксированный двугранный угол; и
- подвижный механизм, выполненный с возможностью размещения призматической пластинки на пути луча прицельного излучения, когда включено изменение наводки, и ее удаления, когда изменение наводки выключено, или наоборот.
При этом двугранный угол выбирают таким образом, чтобы при размещении на пути луча прицельного излучения призматическая пластинка осуществляла отклонение этого луча, противоположное или идентичное углу изменения наводки. Можно применять другие устройства изменения наводки, такие как устройства с поступательным перемещением линзы ортогонально к ее оси или устройства с угловым отклонением зеркала в случае оптических компонентов, которые размещены между системой наведения и сценой.
Объектом изобретения является также способ контроля целеуказания, в ходе которого селективно производят указание цели в сцене при помощи луча прицельного излучения и одновременно наблюдают сцену с пятном целеуказания, которое создает обратно рассеиваемая часть прицельного излучения, с использованием инструмента получения изображений, соответствующего настоящему изобретению.
Другие признаки и преимущества изобретения будут более очевидны из описания не ограничительных примеров выполнения со ссылками на прилагаемые чертежи, на которых:
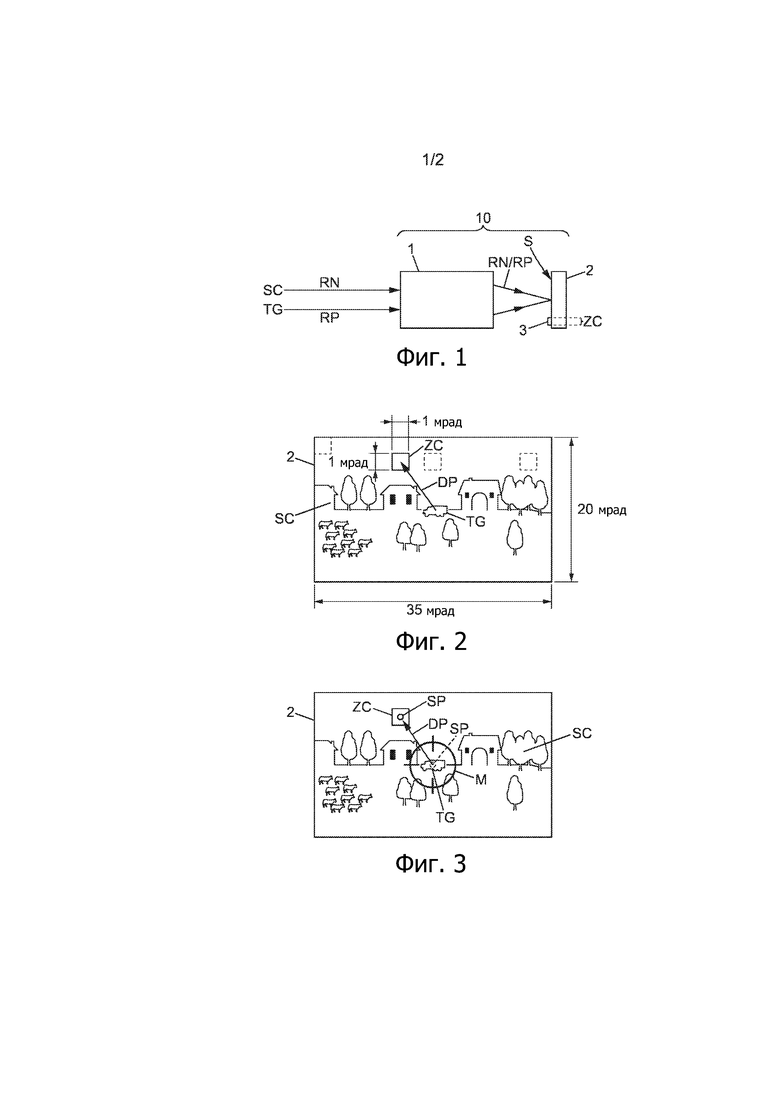
фиг. 1 - оптическая схема инструмента получения изображений по настоящему изобретению;
фиг. 2 и 3 - сцена и цель, наблюдаемые при помощи инструмента получения изображений, показанного на фиг. 1;
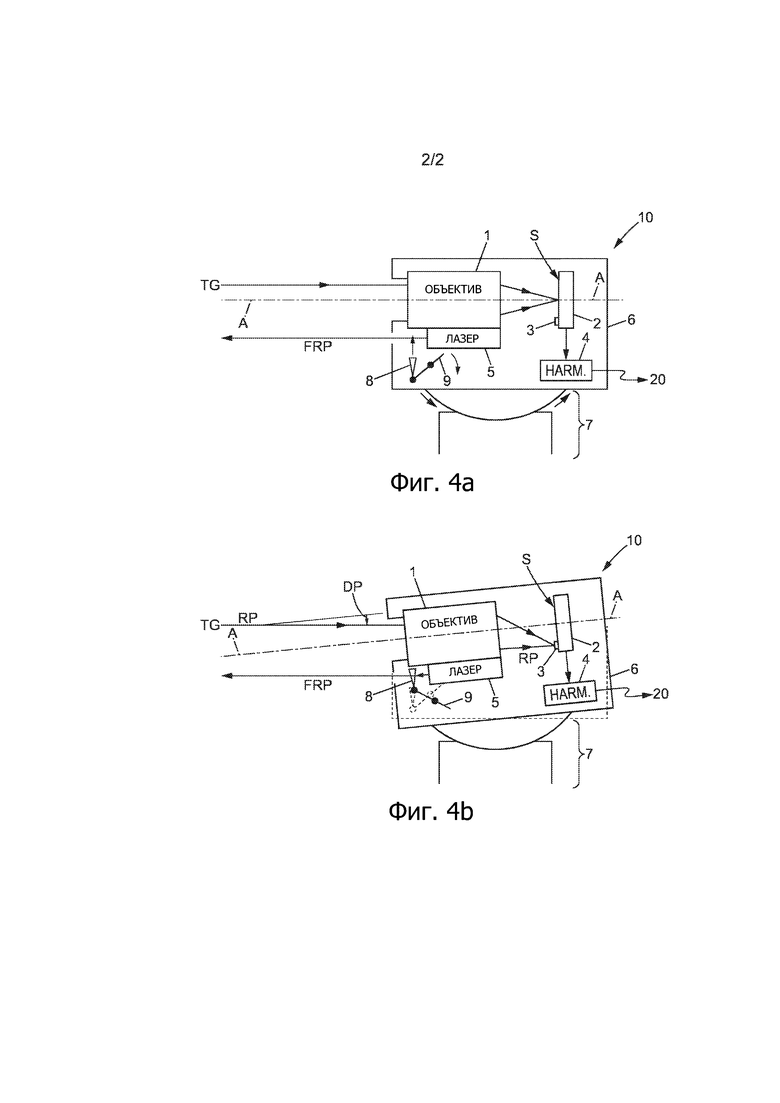
фиг. 4а и 4b - инструмент получения изображений с внутренним целеуказанием в положении центрального наведения (фиг. 4а) и в положении изменения наводки (фиг. 4b).
Для большей ясности размеры элементов, показанных на фигурах, не соответствуют ни реальным размерам, ни реальным соотношениям размеров. Кроме того, на различных фигурах идентичные элементы или элементы с идентичными функциями имеют одинаковые обозначения.
Как показано на фиг. 1, инструмент 10 получения изображений содержит объектив 1 и матричный датчик 2 изображения. Фоточувствительная поверхность S датчика 2 изображения находится в фокальной плоскости объектива 1, при этом объектив 1 формирует на датчике 2 изображение сцены SC, которая находится на расстоянии перед объективом 1. Инструмент 10 является функциональным при естественном излучении, обозначенном RN, и при прицельном излучении, обозначенном RP. Естественное излучение RN испускается или рассеивается элементами сцены SC, которая находится в поле зрения оптического входа инструмента 10. Например, естественное излучение RN может находиться в спектральном интервале видимого света между значениями длины волны 0,360 мкм (микрометр) и 0,800 мкм и даже до 1,5 мкм. В альтернативном варианте естественное излучение RN может быть инфракрасным излучением в интервале длины волны между значениями 3 мкм и 15 мкм. Такое естественное инфракрасное излучение позволяет наблюдать сцену SC в дневное и в ночное время.
Прицельное излучение RР может быть лазерным излучением, например, с длиной волны 1,06 мкм. Такое излучение используют для указания цели TG в сцене SC. При этом прицельное излучение RР обратно рассеивается участком элемента сцены SC, на который оно направлено. Обратно рассеиваемая таким образом часть прицельного излучения RР собирается объективом 1 и формирует изображение участка элемента сцены на датчике 2 изображения. Изображение, снятое датчиком 2, имеет первый вклад, образованный естественным излучением RN, и второй вклад, образованный прицельным излучением RР и наложенный на первый вклад. В частности, второй вклад представляет собой пятно прицельного излучения, которое появляется в месте сцены SC, где луч прицельного излучения рассеивается в обратном направлении. В рамках настоящего изобретения понятия «отражается» и «рассеивается в обратном направлении» используются эквивалентно в связи с прицельным излучением, хотя использование одного или другого из них зависит от характеристик зеркального отражения или рассеянного отражения элемента сцены, освещенного лучом наведения. Кроме того, когда прицельное излучение освещает искомую цель, пятно прицельного излучения, полученное на изображении, снятом датчиком 2, называют пятном целеуказания.
Как правило, матричный датчик 2 изображения содержит набор фоточувствительных элементов или пиксельных элементов, которые расположены на пересечениях строк и столбцов на поверхности S датчика.
На фиг. 2 представлен пример изображения, снятого инструментом 10. На изображении видны элементы сцены SC, среди которых находится цель TG. В представленном примере цель TG является транспортным средством. Поле зрения оптического входа инструмента 10 может иметь угловые размеры, например, 35 мрад (миллирадиан) х 20 мрад.
Как правило, лучи естественного излучения RN или прицельного излучения RР, которые проходят параллельно линии оптического визирования объектива 1 и датчика 2 изображения, сходятся к центральной точке поверхности S датчика 2 изображения. Например, транспортное средство, которое может представлять собой цель TG, может находиться в центре изображения, когда линия оптического визирования инструмента 10 направлена на это транспортное средство. На основании этого положения линии оптического визирования изменение наводки инструмента 10 позволяет переместить сцену SC и цель TG в снимаемом изображении таким образом, чтобы привести цель TG в заранее определенную зону поверхности S датчика 2 изображения, обозначенную ZC. На фиг. 2 такое изменение наводки обозначено DP.
Согласно изобретению, зона ZC поверхности S датчика 2 изображения имеет фильтр 3 (фиг. 1), который селективно пропускает прицельное излучение RР относительно естественного излучения RN, если прицельное излучение RР и естественное излучение RN спектрально разделены. В альтернативном варианте фильтр 3 может селективно пропускать прицельное излучение RР относительно основной части естественного излучения RN, которая отсекается фильтром 3, если спектральный интервал прицельного излучения RР входит в спектральный интервал естественного излучения RN. Фильтр 3 может быть выполнен известным специалисту в данной области образом в виде многослойного набора, если он является интерференционным фильтром. Такие варианты выполнения можно найти во многих доступных работах и статьях, описывающих оптические фильтры.
Зона ZC, которая называется зоной подтверждения, по причинам, которые будут пояснены ниже, может иметь такие же угловые размеры - 1 мрад х 1 мрад, - как и поле зрения оптического входа. Эта зона полностью перекрыта фильтром 3, поэтому часть изображения, снимаемая датчиком 2 в зоне ZC, образована исключительно или в основном прицельным излучением RР.
В случае внутреннего целеуказания предпочтительно размеры зоны ZC должны охватывать все потенциально возможные отклонения луча целеуказания по отношению к инструменту 10. С другой стороны, эта зона ZC предпочтительно не является слишком обширной, чтобы она не скрывала окружающую среду вблизи цели и даже края цели, если она не является слишком малоразмерной.
Фиг. 3 соответствует фиг. 2, когда цель TG освещена лучом прицельного излучения RР. На практике, такой луч прицельного излучения RР является лазерным лучом. Обратное рассеяние прицельного излучения RР целью TG приводит к вкладу на изображении в виде пятна SP луча, которое локально накладывается на сцену SC. Вместе с тем, по причине фотонного шума датчика 2 изображения и удаления цели TG по отношению к инструменту 10, это пятно SР может иметь слабые контрастность и отношение сигнала к шуму по отношению к изображению сцены SC, получаемому при помощи естественного излучения RN. По этой причине оно показано на фиг. 3 пунктирной линией на транспортном средстве, которое является целью TG.
Когда же изменение наводки DP приводит изображение транспортного средства в зону ZC, естественное излучение RN больше не создает изображения ни сцены SC, ни цели TG в этой зоне, тогда как изображение пятна SP прицельного излучения RР остается. Это изображение пятна SP имеет при этом высокие контрастность и отношение сигнала к шуму в зоне ZC. Поэтому пятно SP показано теперь в этой зоне ZC сплошной линией (фиг. 3). Таким образом, наблюдаемое изображение образовано сценой SC за пределами зоны ZC, а в зоне ZC - пятном SP прицельного излучения RР, которое отражается от транспортного средства. Таким образом, оно позволяет оператору, просматривающему это изображение, подтвердить, что пятно SP целеуказания расположено правильно по отношению к остальной части сцены SC и, следовательно, находится на искомой цели TG. По этой причине зону ZC называют зоной подтверждения.
Предпочтительно зона ZC подтверждения может находиться в границах поверхности S датчика 2 изображения в месте, которое позволяет оператору легко понять, чтобы понять, интерпретировать или проверить содержание изображения. Например, это место может находиться вблизи края или угла поверхности S, предпочтительно в части этой поверхности S, которая может быть занята изображением неба в случае наружной сцены. На фиг. 2 квадратами из пунктирных линий показаны предпочтительные положения, которые тоже возможны для зоны ZC подтверждения в границах поверхности S.
На фиг. 3 показана также мира М визирования, наложенная на снятое изображение, например, в центре поверхности S датчика 2 изображения. Такое наложение часто создается в электронном виде, используя данные изображения, считываемые датчиком 2, по отношению к положениям пиксельных элементов в границах поверхности S. Например, мира М может находиться в центральном положении в границах поверхности S.
Такая мира М визирования является исключительно полезной, когда амплитуда и ориентация изменения наводки DP определены заранее, иначе говоря, когда изменение наводки является автоматическим. Оператор наблюдает при этом сцену SC, которая содержит цель TG, при помощи инструмента 10, ориентируя инструмент таким образом, чтобы цель TG появилась в мире М визирования, по возможности, в ее центре. При этом он приводит в действие автоматическое изменение наводки, которое автоматически приводит к перемещению изображения на поверхности S датчика 2 таким образом, чтобы элемент сцены SC, который находился в центре миры М визирования, то есть в данном случае - цель TG, оказался в зоне ZC подтверждения. Изобретение, полученное при таком изменении наводки, позволяет оператору проверить в реальном времени наличие и местонахождение луча прицельного излучения RР относительно цели TG.
Следовательно, амплитуда и ориентация изменения наводки DP зависят от положения зоны ZC подтверждения в границах поверхности S датчика 2 изображения. В частности, изменение наводки DP можно выбрать таким образом, чтобы изменение направления, которое оно производит в поле зрения оптического входа инструмента 10, соответствовало перемещению в фокальной плоскости, начиная от центра миры М визирования и до центра зоны ZC подтверждения.
Устройства изменения наводки, выполненные с возможностью автоматически применять изменение заранее определенных амплитуды и ориентации, хорошо известны специалисту в данной области, поэтому их описание опускается.
На фиг. 4а и 4b показан конкретный тип заявленных инструментов, называемых инструментами с внутренним целеуказанием. Инструмент этого типа дополнительно содержит систему целеуказания, которая создает луч прицельного излучения, обозначенный FRP. Эта система целеуказания включает в себя, в частности, лазерный блок 5, который генерирует луч FRP. В предпочтительных конфигурациях таких инструментов с внутренним целеуказанием система целеуказания является неподвижной относительно объектива 1 и датчика 2 изображения, например, внутри общего корпуса 6. Весь комплекс может быть при этом смонтирован на поворотном держателе 7, предпочтительно на держателе с двумя осями вращения. Такой держатель 7 может осуществлять вышеупомянутое изменение наводки DP, в том числе автоматически по команде оператора. Однако при этом необходимо поддерживать постоянную ориентацию луча FRP относительно сцены SC при изменении наводки, чтобы пятно SP освещения луча FRP было видимым в месте цели TG в зоне ZC подтверждения. Для этого инструмент 10 может дополнительно содержать систему компенсации, которая служит для того, чтобы изменение наводки DP не приводило к изменению ориентации луча FRP, хотя система целеуказания и перемещается из-за поворота держателя 7 с объективом 1 и датчиком 2 изображения. В частных вариантах выполнения такой системы компенсации она может содержать призматическую пластинку 8 и механизм перемещения этой пластинки, обозначенный позицией 9. Например, механизм 9 перемещения, называемый также подвижным механизмом, может представлять собой рычаг, который перемещает призматическую пластинку 8 между двумя заранее определенными положениями. Согласно первой возможности, призматическая пластинка 8 не затрагивает луч FRP до изменения наводки (фиг. 4а), и, когда происходит изменение наводки DP с поворотом корпуса 6 на поворотном держателе 7, призматическая пластинка 8 оказывается на пути луча FRP (фиг. 4b). Призматическая пластинка выполнена с возможностью точно компенсировать эффект поворота корпуса 6 таким образом, чтобы пятно SP освещения луча FRP в сцене SC оставалось неподвижным до включения изменения наводки DP и после его завершения. Для этого двугранный угол призматической пластинки 8, а также ее ориентацию выбирают в зависимости от амплитуды и от угловой ориентации изменения наводки DP. При этом в первом варианте выполнения системы компенсации двугранный угол призматической пластинки 8 и ее ориентацию выбирают таким образом, чтобы получить отклонение луча FRP, противоположное угловому изменению корпуса 6 во время изменения наводки DP.
Согласно второй возможности, призматическая пластинка 8 может оказывать свое действие на луч FRP до изменения наводки DP, но становится неактивной после завершения изменения наводки DP. Для этого двугранный угол призматической пластинки 8 и ее ориентацию необходимо выбирать таким образом, чтобы производить отклонение луча FRP, идентичное угловому изменению корпуса 6 во время изменения наводки DP.
Вместо коррекции изменения наводки DP в зависимости от соответствующих положений миры М визирования и зоны ZC подтверждения, как было указано выше, предпочтительно корректируют положение миры М визирования таким образом, чтобы изменение наводки DP приводило к точному перемещению изображения вдоль вектора, отходящего от центра миры М визирования и приходящего в центр зоны ZC подтверждения. Такую коррекцию называют выравниванием на профессиональном жаргоне. Как известно, ее можно осуществлять при помощи электронных средств или программных средств, когда мира М визирования наложена на сигналы считывания датчика 2, как было указано выше. Такая система выравнивания обозначена HARM и позицией 4 на фиг. 4а и 4b. Позицией 20 обозначен выход данных изображения инструмента 10 получения изображений для соединения с системой просмотра изображения. Согласно возможному варианту такого выравнивания, условия получения изображения выбирают таким образом, чтобы пятно SP освещения прицельного излучения RР было видимым четко как внутри, так и снаружи зоны ZC подтверждения на снятом изображении. При этом инструмент 10 находится в положении после изменения наводки, и на снятом изображении измеряют отклонение между центром пятна SP освещения и центром зоны ZC подтверждения в направлении последнего. После этого изменение наводки DP прекращают, чтобы пятно SP освещения вернулось в направлении миры М визирования на новом снятом изображении, но с возможной погрешностью относительно центра последнего. Миру М визирования перемещают относительно датчика 2, начиная с нового положения пятна SP освещения, на величину ориентированного отклонения, равную отклонению, которое было измерено ранее в положении изменения наводки.
В возможном варианте, когда изменение наводки DP происходит автоматически, то есть с заранее определенными амплитудой и ориентацией изменения наводки, миру М визирования можно переместить на снятом изображении одновременно и таким же образом, как и сцену SC и пятно SP освещения.
Разумеется, изобретение можно воспроизводить, адаптируя и изменяя его второстепенные признаки по отношению к подробно описанным выше вариантам выполнения. В частности, в случае заявленного инструмента получения изображений с внутренним целеуказанием система целеуказания может быть соединена с неподвижной частью устройства изменения наводки, поэтому отпадает необходимость в системе компенсации. Наконец, изобретение можно применять к инструменту получения изображений для контроля целеуказания, который является инструментом с внешним целеуказанием, то есть инструмент получения изображений выполнен отдельно и независимо от системы целеуказания.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЗАЦИИ ЦЕЛЕУКАЗАНИЯ ПРИ ПРИЦЕЛИВАНИИ НА ВЕРТОЛЕТНОМ КОМПЛЕКСЕ | 2018 |
|
RU2697939C1 |
| СПОСОБ ОЦЕНКИ ТРЕНИРОВАННОСТИ ОПЕРАТОРА ЛАЗЕРНОГО ЦЕЛЕУКАЗАТЕЛЯ-ДАЛЬНОМЕРА | 1996 |
|
RU2098757C1 |
| ВЕРТОЛЕТНЫЙ КОМПЛЕКС СОВРЕМЕННОГО БОРТОВОГО ВООРУЖЕНИЯ | 2019 |
|
RU2726301C1 |
| СПОСОБ ПРИЦЕЛИВАНИЯ И НАВЕДЕНИЯ УПРАВЛЯЕМЫХ ОБЪЕКТОВ | 2009 |
|
RU2413159C1 |
| Система регистрации лазерного целеуказания | 2018 |
|
RU2675101C1 |
| ПРИБОР ДЛЯ ДНЕВНОГО И НОЧНОГО НАБЛЮДЕНИЯ И ПРИЦЕЛИВАНИЯ | 2006 |
|
RU2310219C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| СПОСОБ СТРЕЛЬБЫ УПРАВЛЯЕМЫМ СНАРЯДОМ С ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2019 |
|
RU2737634C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| ДВУХКАНАЛЬНЫЙ ПРИЦЕЛ НОЧНОГО ВИДЕНИЯ | 2002 |
|
RU2296938C2 |
Изобретение относится к области получения изображений и касается инструмента получения изображений для контроля целеуказания. Инструмент содержит объектив, матричный датчик изображения и фильтр. Объектив выполнен с возможностью формирования изображения сцены при помощи естественного излучения и прицельного излучения, которое рассеивается целью в обратном направлении. Фильтр перекрывает ограниченную зону датчика изображения (зону подтверждения) и выполнен с возможностью селективно пропускать на пиксельные элементы, содержащиеся в зоне подтверждения, прицельное излучение без естественного излучения. Инструмент ориентирован в сторону сцены таким образом, чтобы цель отображалась в зоне подтверждения датчика изображения. Цель появляется на снятом изображении только за счет рассеиваемого в обратном направлении прицельного излучения. Технический результат заключается в повышении дальности и точности целеуказания. 2 н. и 10 з.п. ф-лы, 5 ил.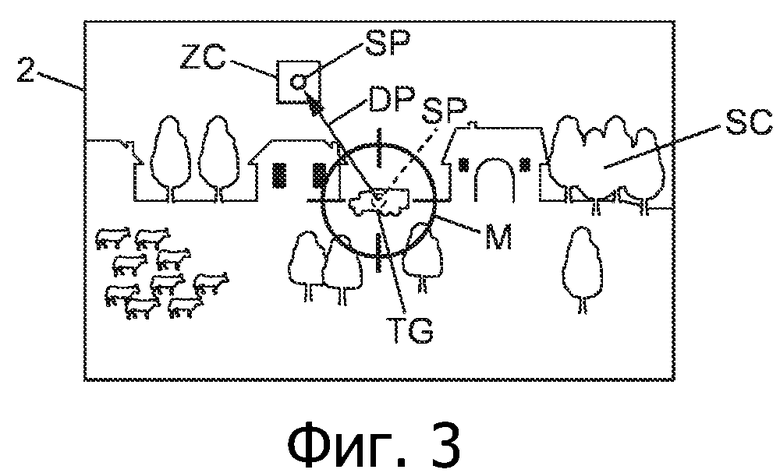
1. Инструмент (10) получения изображений для контроля целеуказания (TG), содержащий:
- объектив (1), выполненный с возможностью формирования изображения сцены (SC) при помощи первого излучения (RN), называемого естественным излучением, которое обеспечивается элементами сцены, и таким образом, чтобы сформированное изображение содержало вклад, обеспечиваемый целью (TG), содержащейся в сцене, причем указанный вклад производится вторым излучением (RР), называемым прицельным излучением, которое рассеивается целью в обратном направлении; и
- матричный датчик (2) изображения, содержащий пиксельные элементы, каждый из которых является чувствительным одновременно к естественному излучению (RN) и к прицельному излучению (RР), при этом датчик изображения расположен таким образом, чтобы снимать изображение, сформированное объективом (1),
при этом снятое изображение представляет собой отображение сцены (SC), причем естественное излучение (RN) и прицельное излучение (RР) вместе участвуют в обеспечении появления внутри снятой сцены цели (TG), освещаемой прицельным излучением,
отличающийся тем, что дополнительно содержит:
- фильтр (3), который перекрывает ограниченную зону (ZC) датчика (2) изображения, называемую зоной подтверждения, и выполнен с возможностью селективно пропускать на пиксельные элементы, содержащиеся в указанной зоне подтверждения, прицельное излучение (RР) без естественного излучения (RN) или без части указанного естественного излучения, которая спектрально отделена от указанного прицельного излучения (RР),
при этом, когда инструмент (10) ориентирован в сторону сцены (SC) таким образом, чтобы цель (TG) отображалась в зоне (ZC) подтверждения датчика (2) изображения, цель появляется на снятом изображении только за счет рассеиваемого в обратном направлении прицельного излучения (RР) или появляется на снятом изображении в основном за счет указанного обратно рассеиваемого прицельного излучения.
2. Инструмент (10) по п. 1, выполненный таким образом, чтобы длина волны естественного излучения (RN), обнаруживаемого пиксельными элементами датчика (2) изображения, составляла от 3 до 15 мкм или от 0,36 до 1,5 мкм, и длина волны прицельного излучения (RР), также обнаруживаемого пиксельными элементами датчика изображения, составляла от 1,00 до 1,10 мкм.
3. Инструмент (10) по п. 1 или 2, в котором фильтр (3), перекрывающий зону (ZC) подтверждения датчика (2) изображения, является интерференционным фильтром.
4. Инструмент (10) по любому из предыдущих пунктов, в котором зона (ZC) подтверждения, где находится фильтр (3) на датчике (2) изображения, находится вблизи периферического края или вблизи угла матрицы, образованной пиксельными элементами датчика изображения.
5. Инструмент (10) по любому из предыдущих пунктов, выполненный таким образом, чтобы изображение сцены (SC), снимаемое датчиком (2) изображения, соответствовало полю зрения оптического входа, которое имеет первый угловой размер, составляющий от 8 до 80 мрад, и второй угловой размер, составляющий от 6 до 60 мрад, при этом указанный второй размер измеряется перпендикулярно к указанному первому размеру, а
фильтр (3) имеет такие размеры, чтобы они соответствовали через объектив (1), участку поля зрения оптического входа, который имеет третий угловой размер, составляющий от 0,3 до 3 мрад, при измерении указанного третьего размера параллельно указанному первому размеру поля зрения оптического входа, и имеет четвертый размер, также составляющий от 0,3 до 3 мрад, при измерении указанного четвертого размера параллельно указанному второму размеру поля зрения оптического входа.
6. Инструмент (10) по любому из предыдущих пунктов, дополнительно содержащий:
- систему ориентирования, выполненную с возможностью наложения миры (М) визирования на снятое изображение в месте указанного снятого изображения, которое определяется относительно датчика (2) изображения; и
- устройство изменения наводки, выполненное с возможностью поворачивать инструмент (10) на фиксированный угол изменения наводки таким образом, чтобы элемент сцены (SC), который отображается на мире (М) визирования до начала изменения (DP) наводки, отображался в зоне (ZC) подтверждения после выполнения изменения наводки.
7. Инструмент (10) по п. 6, дополнительно содержащий систему (4) выравнивания, выполненную с возможностью коррекции положения миры (М) визирования относительно датчика (2) изображения таким образом, чтобы цель (TG) отображалась в центре зоны (ZC) подтверждения, когда выполнено изменение наводки, и если указанная цель отображалась в центре миры визирования до начала изменения наводки.
8. Инструмент (10) по любому из предыдущих пунктов, дополнительно содержащий:
- систему целеуказания, которая содержит лазерный блок (5), выполненный с возможностью генерировать луч (FRP) прицельного излучения и ориентированный таким образом, чтобы направлять луч прицельного излучения на цель (TG).
9. Инструмент (10) по п. 6 или 7 и в комбинации с п. 8, выполненный таким образом, чтобы ориентация луча (FRP) прицельного излучения относительно сцены (SC) была идентичной между первым моментом, в который элемент сцены отображается на мире (М) визирования до начала изменения (DP) наводки, и вторым моментом, в который указанный элемент сцены отображается в зоне (ZC) подтверждения, когда выполнено изменение наводки.
10. Инструмент (10) по п. 9, в котором устройство изменения наводки выполнено с возможностью поворачивать одновременно объектив (1), датчик (2) изображения и лазерный блок (5), и инструмент дополнительно содержит систему компенсации, которая выполнена с возможностью удерживать луч (FRP) прицельного излучения параллельным линии оптического визирования объектива и датчика изображения, пока изменение (DP) наводки не начато, и система компенсации становится действующей после осуществления изменения (DP) наводки таким образом, чтобы компенсировать эффект указанного изменения наводки для указанного луча прицельного излучения.
11. Инструмент (10) по п. 10, в котором система компенсации содержит:
- призматическую пластинку (8), прозрачную для луча (FRP) прицельного излучения, с двумя плоскими гранями, которые образуют между собой фиксированный двугранный угол; и
- подвижный механизм (9), выполненный с возможностью размещения призматической пластинки на пути луча (FRP) прицельного излучения, когда изменение (DP) наводки включено, и удаления указанной призматической пластинки с указанного пути, когда изменение наводки отключено, или с возможностью удержания призматической пластинки на пути луча прицельного излучения, когда изменение наводки не включено, и удаления указанной призматической пластинки с указанного пути, когда изменение наводки включено,
при этом двугранный угол выбирают таким образом, чтобы при размещении на пути луча (FRP) прицельного излучения призматическая пластинка (8) осуществляла отклонение указанного луча прицельного излучения, которое является противоположным или идентичным углу изменения (DP) наводки.
12. Способ контроля целеуказания, включающий осуществление селективного указания цели (TG) в сцене (SC) при помощи луча (FRP) прицельного излучения и одновременное наблюдение сцены с пятном целеуказания, которое создает обратно рассеиваемая часть прицельного излучения, с использованием инструмента (10) получения изображений по любому из предыдущих пунктов.
| US 4737028 A1, 12.04.1988 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Перекатываемый затвор для водоемов | 1922 |
|
SU2001A1 |
| РЕАКЦИОННЫЙ АППАРАТ | 0 |
|
SU167202A1 |

