Заявленная группа изобретений относится к авиационной технике, а именно к летательным аппаратам (ЛА) вертикального взлета/ посадки и горизонтального прямолинейного полета.
Из уровня техники известен многовинтовой тяжелый конвертовинтокрыл (см. патент Российской Федерации №2521121 на изобретение, опубл. 27.06.2014).
Конвентовинтокрыл выполнен в виде высокорасположенного моноплана, имеющего на консолях крыла винты в поворотных кольцевых каналах, фюзеляж с шарнирно установленными двумя силовыми балками ромбовидной в плане качалки, имеющей возможность отклонения ее балок в продольной плоскости и снабженной на противоположных ее вершинах несущими винтами на пилонах. Винты связаны валами трансмиссии с двигателями силовой установки, смонтированными в корневой части крыла. Винтокрыл имеет хвостовое оперение с цельноповоротным стабилизатором, трехстоечное убирающееся колесное шасси, крыло, выполненное в виде комбинации из двух с близким расположением друг к другу крыльев, смонтированных уступом. Переднее крыло выше заднего при отрицательной деградации первого ко второму по углу атаки. Межгондольные секции переднего и заднего крыльев снабжены предкрылком и закрылком и смонтированы так, что между задней кромкой переднего крыла и передней кромкой заднего крыла, имеющего 45% площади переднего крыла, располагается узкая щель, равная 2,5% хорды переднего крыла при расстоянии между средними линиями профиля переднего и заднего крыльев, равном 30% хорды заднего крыла.
Недостатками известного технического решения являются:
- необходимость разворота движителей;
- низкая управляемость и маневренность;
- низкая безопасность взлета, полета и приземления ЛА из-за отсутствия защиты винтов от соударений с поверхностью земли и иными препятствиями;
- большие массогабаритные показатели (характеристики) ЛА.
Из уровня техники известен способ полета в воздухе с возможностью вертикального взлета и посадки (см. патент Российской Федерации №2566177 на изобретение, опубл. 20.10.2015).
Способ полета включает создание воздушного потока, направленного сверху вниз, соосными движителями с лопатками, вращающимися в противоположные стороны. Лопатки имеют возможность вращения вокруг своей продольной оси с изменением угла атаки. Путем изменения углов поворота лопаток движителей в период каждого оборота обеспечивают создание горизонтальной составляющей вектора тяги и стабилизацию полета. Горизонтальную тягу в режиме установившегося горизонтального полета создают реактивным движителем. Посредством поворота лопаток движителя до угла атаки 0° в режиме продолжительного горизонтального полета образуют замкнутую аэродинамическую поверхность - вращающееся крыло с возможностью создания подъемной силы. Движители соединены с двигателем через систему привод - редуктор. Лопатки движителя соединены с системой перекоса, гироскопом и системой управления.
Недостатками известного технического решения являются:
- низкая надежность и управляемость, поскольку для горизонтального полета установлен один по центру движитель;
- возможность только горизонтального прямолинейного полета;
- используется реактивный движитель, что приводит к ухудшению маневренности и экологичности;
- низкая безопасность взлета, полета и приземления ЛА;
- отсутствие защиты винтов от соударений с поверхностью земли и иными препятствиями.
Из уровня техники известны способ полета ЛА и ЛА для его реализации (см. международную публикацию заявки WO2017198082 на изобретение, опубл. 08.05.2017). Недостатками известного из уровня техники технического решения являются:
- необходимость изменения положения планера по горизонтали для прямолинейного полета;
- необходимость использования частично тяги подъемных движителей для создания силы толкающей ЛА вперед;
- низкая безопасность взлета, полета и приземления ЛА;
- низкая скорость полета;
- низкий комфорт полета ЛА для пассажиров;
- низкая надежность.
Задачей заявленной группы изобретения является создание компактного, безопасного при взлете/посадки и полете ЛА с высокой маневренностью и управляемостью, а также повышенной скоростью полета.
Техническими результатами заявленной группы изобретений являются:
- снижение затрат энергии на горизонтальный прямолинейный полет;
- увеличение стабильности и комфорта полета;
- улучшение управляемости и маневренности полета;
- повышение экологичности;
- снижение лобового сопротивления при горизонтальном прямолинейном полете;
- увеличение тяги и скорости полета;
- увеличение безопасности взлета, полета и приземления ЛА;
- повышение отказоустойчивости с сохранением положения ЛА в полете;
- обеспечение защиты винтов от соударений с поверхностью земли и иными препятствиями во время полета;
- уменьшение габаритных размеров ЛА (увеличение компактности ЛА);
- возможность оперативного выявления и устранения неисправности (поломки) электродвигателей и ходовых толкающих винтов;
- возможность как горизонтального прямолинейного полета, так и вертикального взлета/посадки.
Технические результаты заявленной группы изобретений достигаются тем, что летательный аппарат (ЛА) для вертикального взлета/посадки и горизонтального прямолинейного полета содержит:
- передние и задние движители или группы передних и задних движителей в окольцовке - импеллеров для вертикального взлета/посадки, каждый из которых соединен с независимо работающим электродвигателем, установленные в равном количестве, на определенном расстоянии друг от друга, спереди и сзади ЛА по направлению движения ЛА в горизонтальной плоскости, противоположно и симметрично относительно друг друга и продольной оси ЛА;
- дополнительный - вспомогательный ходовой толкающий винт или группу дополнительных - вспомогательных ходовых толкающих винтов для горизонтального прямолинейного полета, каждый из которых соединен с независимо работающим электродвигателем, установленных на определенном расстоянии друг от друга в горизонтальной плоскости, перпендикулярной продольной оси ЛА, противоположно и симметрично относительно друг друга и продольной оси ЛА, при этом независимо работающие электродвигатели ходовых толкающих винтов установлены внутри открытых несущих пространственных трубчатых рам - экранов таким образом, что они видимы со всех внешних сторон и к ним есть доступ.
В одном варианте выполнения ЛА, ходовой толкающий винт или ходовые толкающие винты установлены по центру задней части борта ЛА, на несущей силовой платформе.
В другом варианте выполнения ЛА, ходовые толкающие винты установлены слева и справа от борта ЛА.
Еще в одном варианте выполнения ЛА, ходовые толкающие винты установлены по центру ЛА, а также слева и справа от борта ЛА.
В варианте выполнения ЛА, независимо работающие электродвигатели ходовых толкающих винтов установлены на одной общей несущей силовой платформе - раме в виде трубы и/или на двух отдельных несущих силовых платформах - рамах в виде труб, перпендикулярных продольной оси ЛА, слева и справа от борта ЛА, при этом каждый винт вращается вокруг своей одной горизонтальной оси.
В варианте выполнения ЛА, независимо работающие электродвигатели передних и задних импеллеров установлены на несущей силовой платформе - раме, выполненной из труб, образуя винтомоторные группы (ВМГ), при этом лопасти каждого импеллера вращаются вокруг своей одной вертикальной оси.
В вариантах выполнения ЛА, количество электродвигателей ходовых толкающих винтов может быть любым и одинаково слева и справа от борта ЛА, а количество электродвигателей подъемных передних и задних импеллеров может быть любым и одинаково спереди и сзади ЛА.
В вариантах выполнения ЛА, открытые несущие пространственные трубчатые рамы могут быть выполнены, например, в форме эллипсоида или параллелепипеда, замкнутого или разомкнутого типа.
В одном варианте выполнения ЛА, независимо работающие электродвигатели ходовых толкающих винтов установлены перпендикулярно, спереди и сзади на несущей силовой платформе - раме, противоположно и симметрично относительно друг друга, образуя ходовую толкающую винтомоторную группу (ВМГ), состоящую из соосных пар электродвигателей винтов, при этом винты соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты к внутренним противоположным и симметричным относительно друг друга поверхностям трубок открытой несущей пространственной трубчатой рамы, обращенных друг к другу, и не соприкасаются с ними, между винтами соосной пары и внутренними поверхностями трубок рамы находится только воздух.
В другом варианте выполнения ЛА, независимо работающие электродвигатели ходовых толкающих винтов установлены на передней и задней, относительно продольной оси ЛА, внутренних противоположных и симметричных относительно друг друга поверхностях трубок открытой несущей пространственной рамы, обращенных друг к другу, образуя ходовую толкающую винтомоторную группу (ВМГ), состоящую из соосных пар электродвигателей винтов, при этом винты соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты друг к другу, не соприкасаются с открытой несущей пространственной рамой и между винтами соосной пары находится только воздух, при этом открытая несущая пространственная рама - экран установлена на несущей силовой платформе - раме.
В обоих вариантах выполнения ЛА, ходовая толкающая ВМГ может быть установлена по центру ЛА, в горизонтальной плоскости, перпендикулярной продольной оси ЛА и/или слева и справа от борта ЛА, в горизонтальной плоскости, перпендикулярной продольной оси ЛА.
В вариантах выполнения ЛА, количество открытых несущих пространственных трубчатых рам с ходовой толкающей ВМГ может быть любым и одинаково с левого и правого борта ЛА, а количество соосных пар электродвигателей ходовых толкающих винтов внутри каждой открытой несущей пространственной трубчатой рамы может быть любым в зависимости от ее размера и объема и одинаково слева и справа от борта ЛА, при этом соосные пары внутри каждой открытой несущей пространственной трубчатой рамы расположены в горизонтальной плоскости и на определенном расстоянии друг от друга.
Признаки и сущность заявленной группы изобретений поясняются в последующем детальном описании, иллюстрируемом чертежами (см. фигуры 1-5), где показано следующее.
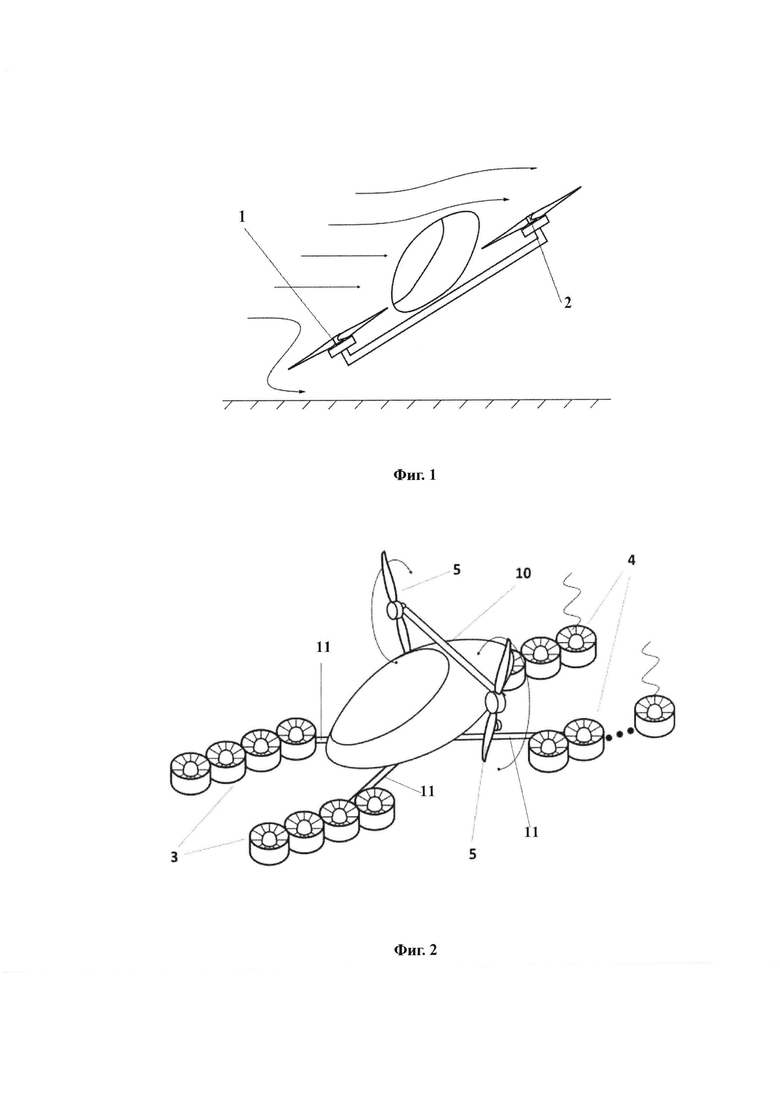
На фиг. 1 - ЛА - аналог с передними и задними движителями - пропеллерами (винтами).
На фиг. 2 - вариант конструкции заявленного ЛА для вертикального взлета/посадки и горизонтального прямолинейного полета с группой передних и задних движителей в окольцовке - импеллеров и дополнительными вспомогательными ходовыми толкающими движителями - винтами.
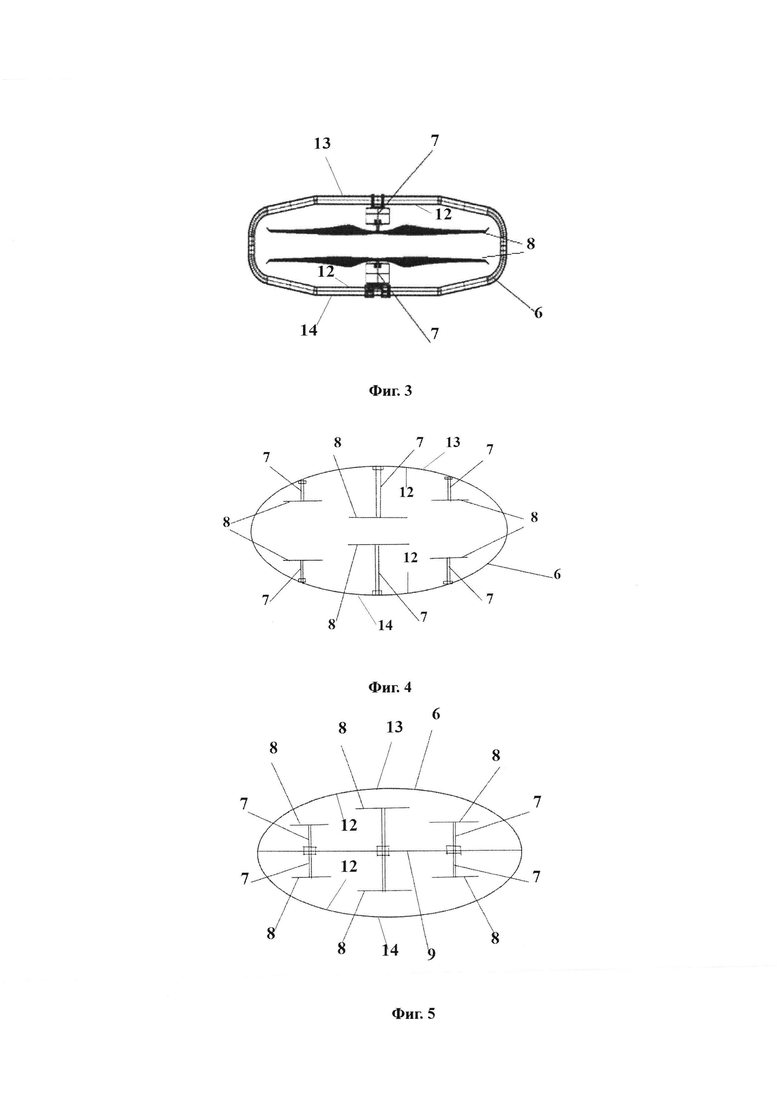
На фиг. 3 - вариант выполнения ходовой толкающей ВМГ ЛА в виде одной соосной пары электродвигателей винтов, размещенных и закрепленных внутри открытой несущей пространственной трубчатой эллипсоидной рамы замкнутого типа (вид сверху).
На фиг. 4 - вариант выполнения ходовой толкающей ВМГ ЛА в виде трех соосных пар электродвигателей винтов, размещенных и закрепленных внутри, на внутренних поверхностях (частях) трубок открытой несущей пространственной трубчатой эллипсоидной рамы замкнутого типа (вид сверху).
На фиг. 5 - вариант выполнения ходовой толкающей ВМГ ЛА в виде трех соосных пар электродвигателей винтов, размещенных и закрепленных внутри открытой несущей пространственной трубчатой эллипсоидной рамы замкнутого типа, на внутренней одной несущей силовой платформе - раме (вид сверху - для ходовых толкающих движителей).
На фигурах 1-5 обозначено следующее:
1 - передние движители - несущие винты (пропеллеры);
2 - задние движители - несущие винты (пропеллеры);
3 - передняя группа движителей в окольцовке - импеллеров;
4 - задняя группа движителей в окольцовке - импеллеров;
5 - дополнительные (вспомогательные) ходовые толкающие движители - винты;
6 - открытая несущая пространственная трубчатая эллипсоидная рама замкнутого типа (вид сверху);
7 - независимо работающие электродвигатели соосной пары (вид сверху);
8 - ходовые толкающие винты соосной пары (вид сверху);
9 - несущая силовая платформа - рама, расположенная внутри открытой пространственной трубчатой рамы - экрана, для установки ходовых толкающих движителей;
10 - несущая силовая платформа - рама для установки ходовых толкающих движителей;
11 - несущая силовая платформа - рама для установки передних и задних импеллеров;
12 - внутренние противоположные и симметричные относительно друг друга поверхности (части) трубок открытой несущей пространственной рамы;
13 - передняя трубка открытой несущей пространственной рамы;
14 - задняя трубка открытой несущей пространственной рамы.
На фиг. 2 представлен вариант выполнения заявленного ЛА с двумя группами передних (3) и двумя группами задних (4) движителей в окольцовке - импеллеров соответственно и двумя дополнительными вспомогательными ходовыми толкающими движителями (5) - винтами - по одному винту (5) слева и справа относительно борта ЛА соответственно.
Каждая группа передних (3) и задних (4) движителей состоит из четырех импеллеров, установленных на концевых участках труб несущей силовой платформы - рамы (11).
Импеллеры (3, 4) устанавливаются в горизонтальной плоскости, на определенном расстоянии друг от друга, при этом лопатки каждого импеллера (3, 4) вращаются вокруг одной своей вертикальной оси.
Толкающие ходовые движители (5) - винты установлены с боковых сторон ЛА (с левого и правого борта ЛА) на одной общей несущей раме (10) в виде трубы, перпендикулярной продольной оси ЛА.
Толкающие винты (5) могут быть установлены на двух отдельных несущих рамах в виде труб, перпендикулярных продольной оси ЛА (на фиг. не показано).
По центру борта ЛА может быть установлен только в один толкающий винт (5) или несколько толкающих винтов (5).
Толкающие винты (5) могут быть установлены одновременно по центру, слева и справа от борта ЛА.
Боковые толкающие винты равноудалены от центра ЛА.
Толкающие ходовые винты устанавливаются в горизонтальной плоскости, перпендикулярной продольной оси ЛА, при этом каждый винт вращается вокруг одной своей горизонтальной оси.
Количество устанавливаемых передних (3) и задних (4) импеллеров одинаково спереди и сзади и может быть любым.
Количество устанавливаемых ходовых толкающих винтов (5) может быть любым и одинаково с каждой боковой стороны ЛА.
На фиг. 2 показан один из вариантов выполнения ЛА. Возможны также и другие варианты выполнения Л А, например с четырьмя ходовыми толкающими винтами (5) (по два с каждой боковой стороны ЛА) и с четырьмя импеллерами (3, 4) - по два импеллера спереди и сзади ЛА.
На фиг. 3 представлен вариант выполнения ходовой толкающей винтомоторной группы (ВМГ) в виде одной соосной пары электродвигателей (7) несущих винтов (8), закрепленной внутри открытой несущей пространственной трубчатой рамы (6) в форме эллипсоида замкнутого типа (вид сверху).
Независимо работающие электродвигатели (7) ходовых толкающих винтов (8) закрепляются своим неподвижным основанием к внутренним, обращенным друг к другу, противоположным и симметричным относительно друг друга поверхностям (частям) (12) трубок (передней (13) и задней (14) по направлению движения ЛА в горизонтальной плоскости) пространственной рамы (6), образуя таким образом ВМГ, состоящую из одной соосной пары электродвигателей (7) винтов (8).
Независимо работающие электродвигатели (7) винтов (8) устанавливаются внутри открытых пространственных трубчатых рам (6) таким образом, что они видимы со всех внешних сторон и к ним есть доступ. Каждый из движителей (8) соединен с независимо работающим электродвигателем (7) соответственно.
ВМГ может устанавливаться внутри рамы (6) по центру (в центральной части) ЛА и/или слева и справа от борта ЛА. Независимо работающие электродвигатели (7) ходовых толкающих винтов (8) установлены на передней (13) и задней (14), относительно направления движения ЛА или несущей рамы (10), внутренних, обращенных друг к другу, противоположных поверхностях (частях) (12) трубок открытой несущей пространственной рамы (6), образуя таким образом винтомоторную группу (ВМГ), состоящую из одной соосной пары электродвигателей (7) винтов (8), при этом винты (8) соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты друг к другу, не соприкасаются с трубками несущей пространственной рамы (6) и между несущими винтами (8) соосной пары находится только воздух.
На фиг. 3 показан один из вариантов выполнения ЛА с одной соосной парой электродвигателей (7) винтов (8), установленной внутри одной открытой пространственной трубчатой рамы (6). Количество соосных пар внутри одной открытой пространственной трубчатой рамы (6) может быть любым, в зависимости от ее размера и объема.
На фиг. 4 представлен вариант выполнения ходовой толкающей ВМГ ЛА в виде трех соосных пар электродвигателей (7) винтов (8), закрепленных внутри открытой несущей пространственной трубчатой рамы (6) в форме эллипсоида (вид сверху).
ВМГ может устанавливаться внутри рамы (6) по центру и/или слева и справа от борта ЛА, независимо работающие электродвигатели (7) ходовых толкающих несущих винтов (8) закрепляются своим неподвижным основанием на передней (13) и задней (14), относительно направления движения ЛА в горизонтальной плоскости, внутренних противоположных и симметричных относительно друг друга поверхностях (частях) (12) трубок открытой несущей пространственной рамы (6), образуя таким образом ВМГ, состоящую из трех соосных пар электродвигателей (7) винтов (8), расположенных на определенном расстоянии друг от друга в горизонтальной плоскости, перпендикулярной продольной оси ЛА, при этом винты (8) соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты друг к другу, не соприкасаются с открытой несущей пространственной рамой (6) и между винтами (8) соосной пары находится только воздух.
В вариантах крепления электродвигателей (7) винтов (8) к внутренним поверхностям (частям) (12) рамы (6), показанных на фиг. 3 и 4, между плоскостями винтов (8) соосной пары оставляют расстояние (от 5 см), исходящее из показателей прочности и гибкости конструкции, для исключения возможности соударений при вибрации, жестком приземлении, виражах и прочем. На центрах пропеллерах (8), на сторонах смотрящих друг на друга, зафиксированы капралоновые конусы, выпирающие на расстояние от 0,2 мм и более над плоскостью винта (8), но не соприкасающиеся между собой. Это позволяет даже в критической ситуации не повредить лопасти винтов (8), т.к. любой удар будет принят конусами.
На фиг. 4 показан один из вариантов выполнения ЛА с тремя соосными парами электродвигателей (7) винтов (8), установленными внутри одной открытой пространственной рамы (6) на определенном расстоянии друг от друга. Количество соосных пар внутри одной открытой пространственной трубчатой рамы (6) может быть любым, в зависимости от ее размера и объема.
Представленная на фиг. 4 ходовая толкающая ВМГ может устанавливаться только по центру (в центральной задней части) борта ЛА (при использовании одной толкающей ВМГ на ЛА) и/или слева и справа от борта ЛА. При этом боковые ВМГ расположены слева и справа на определенном одинаковом расстоянии от центральной ВМГ и относительно друг друга.
На фиг.5 представлен еще один вариант выполнения ходовой винтомоторной группы (ВМГ) ЛА в виде трех соосных пар электродвигателей (7) винтов (8), закрепленных внутри открытой несущей пространственной трубчатой рамы (6) в форме эллипсоида на определенном расстоянии друг от друга (вид сверху).
Независимо работающие электродвигатели (7) винтов (8) закреплены своим неподвижным основанием перпендикулярно спереди и сзади, относительно направления движения ЛА в горизонтальной плоскости, на несущей силовой платформе - раме (9), расположенной в центральной части (по середине) внутри открытой пространственной трубчатой эллипсоидной рамы (6), противоположно и симметрично относительно друг друга, образуя таким образом ВМГ, состоящую из трех соосных пар электродвигателей (7) винтов (8), расположенных на определенном расстоянии друг от друга. При этом винты (8) соосной пары повернуты к внутренним, обращенным друг к другу, противоположным и симметричным относительно друг друга поверхностям (частям) (12) передней (13) и задней (14) трубок открытой пространственной эллипсоидной рамы (6) и не соприкасаются с ними, винты (8) соосной пары вращаются параллельно друг другу вокруг горизонтальной оси и между винтами (8) соосной пары и внутренними противоположными и симметричными относительно друг друга поверхностями (частями) (12) трубок открытой пространственной эллипсоидной рамы (6) находится только воздух.
При установки ВМГ по центру и/или справа и слева от борта ЛА, ходовые толкающие винты (8) соосной пары повернуты к передним (13) и задним (14), относительно продольной оси ЛА (или несущей рамы (10)), внутренним, обращенным друг к другу, противоположным и симметричным относительно друг друга поверхностям (частям) (12) трубок (13, 14) открытой пространственной эллипсоидной рамы (6), винты (8) соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси.
На фиг. 5 показан один из вариантов выполнения ходовой ВМГ ЛА. Количество соосных пар внутри одной открытой пространственной трубчатой рамы (6) может быть любым, в зависимости от ее размера и объема.
Представленная на фиг. 5 ходовая толкающая ВМГ может устанавливаться только по центру (в центральной задней части) борта ЛА (при использовании одной толкающей ВМГ на ЛА) и/или слева и справа от борта ЛА. При этом боковые ВМГ расположены на определенном одинаковом расстоянии от центральной ВМГ.
Открытая несущая пространственная трубчатая рама (поз. 6, фиг. 3, 4, 5) представляет собой систему (пространственную ферму) из соединенных между собой трубок из материалов/металлов высокой прочности, например, из алюминиевого сплава и выполняет функцию экрана, полностью охватывающего электродвигатели (7) и винты (8) с их внешних сторон (поверхностей, частей).
Открытая несущая пространственная трубчатая рама (6) может быть выполнена, например, в форме эллипсоида (см. фиг. 3, 4, 5) или параллелепипеда (на фиг. не показано), как замкнутого (см. фиг. 3, 4, 5), так и разомкнутого типа (на фиг. не показано).
Несущая силовая платформа - рама (11) для передних и задних движителей (3, 4) выполнена из труб, в перехлесте образующих, например, крест. При этом, электродвигатели (7) импеллеров (3) устанавливаются на концевых участках труб.
В одном варианте выполнения Л А, ходовые толкающие движители - винты (5) или ВМГ (фиг. 3, 4, 5) могут быть установлены в центре (ближе к заднему борту ЛА) и/или с боковых сторон ЛА (с левого и правого борта ЛА) на одной общей несущей силовой платформе (9, 10), и/или на разных отдельных несущих силовых платформах.
В другом варианте выполнения ЛА, открытые пространственные трубчатые рамы (4) устанавливаются на концевых участках рамы (10) (в варианте выполнения ЛА, когда электродвигатели ходовых винтов (6) закреплены на внутренних частях (поверхностях) (12) верхней (13) и нижней (14) трубок рамы (6)).
В одном из вариантов выполнения ЛА, в центральной части борта ЛА, ближней к заднему борту ЛА, может устанавливаться только один толкающий ходовой винт (5).
Количество толкающих винтов (5) (см. фиг. 2) или толкающих ВМГ (см. фиг. 3, 4, 5) слева и справа, относительно борта ЛА, одинаково и может быть любым.
Количество толкающих винтов (5, 8) в центральной части ЛА может быть одинаково или отличаться от количества толкающих винтов (5, 8), устанавливаемых слева и справа от борта ЛА.
При установки, например, трех толкающих винтов (5), устанавливаемых по центру, слева и справа от борта ЛА, толкающие винты (5) расположены на определенном расстоянии друг от друга, при этом боковые толкающие винты (5) равноудалены от центрального винта (5).
Количество соосных пар электродвигателей (7) толкающих винтов (8) внутри одной рамы (6) - экрана слева и справа, относительно борта ЛА, одинаково и может быть любым в зависимости от ее размера и объема.
Количество соосных пар электродвигателей (7) толкающих винтов (8) внутри одной рамы (6) центральной ходовой ВМГ может быть любым в зависимости от ее размера и объема и может отличаться от количества соосных пар электродвигателей (7) толкающих винтов (8) внутри одной рамы (6) боковых ходовых толкающих ВМГ.
Количество импеллеров (3, 4) спереди и сзади ЛА одинаково и может быть любым.
Количество открытых несущих пространственных трубчатых рам с ходовой(ыми) (толкающей(ими)) ВМГ внутри может быть любым.
Известные из уровня техники ЛА осуществляют горизонтальный прямолинейный полет благодаря изменению угла тангажа (ЛА наклоняется вперед) (см. фиг 1). Угол меняется увеличением тяги на задние движители (2), тем самым меняется угол ЛА и появляется вектор тяги, двигающий ЛА вперед.
В заявленном ЛА для горизонтального прямолинейного полета и вертикального взлета/посадки не требуется менять угол тангажа, он остается в горизонтальной плоскости, тем самым, снижается лобовое сопротивление и увеличивается скорость полета ЛА. Это достигается благодаря использованию дополнительных - вспомогательных ходовых толкающих движителей - винтов (5) (см. фиг. 2) или ВМГ (см. фиг. 3, 4, 5).
Поскольку для горизонтального прямолинейного движения используется не результирующая тяга вертикальная и горизонтальная задних движителей (2) (см. фиг. 1), а полностью тяга дополнительных вспомогательных ходовых толкающих движителей - винтов (5) или тяга дополнительных ходовых толкающих ВМГ (см. фиг. 3, 4, 5), то снижаются затраты энергии на горизонтальный прямолинейный полет.
Улучшение управляемости и маневренности достигается путем изменения тяги на дополнительных вспомогательных ходовых толкающих движителях (поз. 5, фиг. 2) или тяги дополнительных ходовых толкающих ВМГ (см. фиг. 3, 4, 5): для поворота влево увеличивается тяга правого горизонтального ходового движителя (5) - винта (см. фиг. 2) или тяга правой ВМГ (см. фиг. 3, 4, 5), а для поворота вправо увеличивается тяга левого горизонтального ходового движителя (5) - винта (см. фиг. 2) или тяга левой ВМГ (см. фиг. 3, 4, 5). Тем самым, происходит отклонение ЛА по курсу и коррекция курса.
Регулируя скорость вращения движителей - винтов (поз. 5 - фиг. 2, поз. 8 - фиг. 3, 4, 5) и/или импеллеров (поз. 3, 4, фиг. 2), каждого по отдельности или всех вместе одновременно, с помощью независимо работающих электродвигателей (7), ЛА во время полета может выполнять различные действия (маневры), например, поворачивать, зависать, а также достигать определенного баланса для обеспечения стабильности и комфорта полета.
Увеличение безопасности взлета/посадки и полета ЛА, и обеспечение защиты винтов (5, 8) от соударений с поверхностью земли и иными препятствиями, достигаются за счет отсутствия открытых вращающихся лопастей дополнительных ходовых толкающих движителей (5, 8). Для этого в заявленном изобретении дополнительные ходовые толкающие движители (5, 8) - винты устанавливаются и закрепляются внутри открытых несущих пространственных трубчатых рам (6) в виде эллипсоида или параллелепипеда, выполняющих функцию экранов винтов. Кроме того, в качестве передних (3) и задних (4) движителей, вместо винтов (1, 2) с открытыми лопастями, используются движители или группа движителей (3,4) в окольцовке - импеллеры - лопаточные машины, заключенные в замкнутое сплошное кольцо (кожух).
Повышение отказоустойчивости с сохранением положения ЛА в полете и безопасность полета достигается благодаря использованию соосных пар независимо работающих электродвигателей (7) толкающих винтов (8) и групп подъемных импеллеров (3, 4) (за счет дублирования ВМГ ЛА).
Повышение экологичности ЛА достигается благодаря использованию электрических двигателей (7) винтов (8) и импеллеров (3, 4).
Электродвигатели (7) и винты (5, 8) устанавливаются внутри открытых пространственных рам (6) таким образом, что они видимы со всех внешних сторон и к ним есть доступ. Это позволяет оперативно выявлять и устранять различные неисправности (поломки) электродвигателей (7) и винтов (5, 8), производить их ремонт и замену.
Увеличение компактности ЛА (уменьшение площади ЛА) достигается за счет установки винтов (8) меньшего размера внутри открытых рам (6) в виде соосных пар, вместо установки одного отдельного винта (1, 2) большего размера, а также за счет установки в качестве передних (3) и задних (4) движителей - импеллеров меньших размеров вместо больших по размеру несущих винтов (1, 2).
Использование дополнительных ходовых толкающих движителей - винтов (поз. 5, фиг. 2) или дополнительных ходовых толкающих ВМГ (см. фиг. 3, 4, 5) позволяет значительно увеличить тягу и скорость полета ЛА.
Заявленный ЛА для реализации заявленного способа компактен, безопасен при взлете/посадки и полете, выполнен с возможностью, как горизонтального прямолинейного полета, так и вертикального взлета/посадки, обладает высокой маневренностью и управляемостью, а также повышенной скоростью полета.
Проведенный анализ уровня техники позволил установить: аналоги с совокупностью существенных признаков, тождественных и идентичных существенным признакам заявленной группы изобретений, отсутствуют, что указывает на соответствие заявленной группы изобретений условию патентоспособности «новизна».
Результаты поиска известных решений с целью выявления существенных признаков, совпадающих с отличительными от аналогов существенными признаками заявленной группы изобретений, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных существенных признаков на указанные авторами технические результаты. Следовательно, заявленная группа изобретений соответствует условию патентоспособности «изобретательский уровень».
Несмотря на то, что заявленная группа изобретений показана и описана со ссылкой на его определенные предпочтительные варианты осуществления, специалистам в данной области техники будет понятно, что различные изменения по форме и содержанию заявленной группы изобретений могут быть сделаны в нем без отклонения от сущности и объема заявленной группы изобретений, которые определены прилагаемой формулой изобретения с учетом описания и чертежей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕРТИКАЛЬНОГО ВЗЛЁТА/ПОСАДКИ И ГОРИЗОНТАЛЬНОГО ПРЯМОЛИНЕЙНОГО ПОЛЁТА ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) И ЛЕТАТЕЛЬНЫЙ АППАРАТ (ЛА) ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777564C1 |
| СПОСОБ ВЕРТИКАЛЬНОГО ВЗЛЁТА/ПОСАДКИ И ГОРИЗОНТАЛЬНОГО ПРЯМОЛИНЕЙНОГО ПОЛЁТА ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) И ЛЕТАТЕЛЬНЫЙ АППАРАТ (ЛА) ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777563C1 |
| СПОСОБ ВЕРТИКАЛЬНОГО ВЗЛЁТА/ПОСАДКИ И ГОРИЗОНТАЛЬНОГО ПРЯМОЛИНЕЙНОГО ПОЛЁТА ЛЕТАТЕЛЬНОГО АППАРАТА (ЛА) И ЛЕТАТЕЛЬНЫЙ АППАРАТ (ЛА) ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2787598C1 |
| СПОСОБ РАЗМЕЩЕНИЯ ВИНТОМОТОРНЫХ ГРУПП НА ЛЕТАТЕЛЬНОМ АППАРАТЕ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ И ЛЕТАТЕЛЬНЫЙ АППАРАТ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2777677C1 |
| Система крепления пар электродвигателей коаксиальной винтомоторной группы летательного аппарата (ЛА) | 2020 |
|
RU2751925C1 |
| Мультикоптер вертикального взлета и посадки с импеллерными движителями | 2020 |
|
RU2761991C2 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| Летательный аппарат короткого взлета и посадки с газодинамическим управлением | 2018 |
|
RU2711633C2 |
| Экраноплан с двигательной установкой, выполненной по схеме мультикоптера | 2023 |
|
RU2833275C1 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Летательный аппарат (ЛА) содержит передние и задние движители или группы движителей в окольцовке – импеллеров, для вертикального взлета/посадки, каждый из которых соединен с независимо работающим электродвигателем, дополнительный вспомогательный ходовой толкающий винт или группу ходовых толкающих винтов для горизонтального прямолинейного полета, каждый из которых соединен с независимо работающим электродвигателем. Импеллеры установлены в равном количестве спереди и сзади ЛА по направлению движения в горизонтальной плоскости, симметрично относительно друг друга и продольной оси ЛА. Ходовые толкающие винты установлены в горизонтальной плоскости, перпендикулярной продольной оси ЛА симметрично относительно друг друга и продольной оси ЛА. Электродвигатели ходовых толкающих винтов установлены внутри открытых несущих пространственных трубчатых рам – экранов. Обеспечивается снижение затрат энергии на горизонтальный прямолинейный полет, увеличение тяги и скорости полета, защита движителей от соударений с поверхностью земли и иными препятствиями. 2 н. и 26 з.п. ф-лы, 5 ил.
1. Способ полета летательного аппарата (ЛА) вертикального взлета и посадки, заключающийся в том, что:
- вертикальный взлет/посадка осуществляется благодаря передним и задним движителям или группам передних и задних движителей в окольцовке - импеллерам, каждый из которых соединен с независимо работающим электродвигателем, установленным в равном количестве, на определенном расстоянии друг от друга, спереди и сзади ЛА по направлению движения ЛА в горизонтальной плоскости, противоположно и симметрично относительно друг друга и продольной оси ЛА;
- горизонтальный прямолинейный полет осуществляется благодаря дополнительному вспомогательному ходовому толкающему винту или группе дополнительных вспомогательных ходовых толкающих винтов, каждый из которых соединен с независимо работающим электродвигателем, установленным на определенном расстоянии друг от друга в горизонтальной плоскости, перпендикулярной продольной оси ЛА, противоположно и симметрично относительно друг друга и продольной оси ЛА, при этом независимо работающие электродвигатели ходовых толкающих винтов установлены внутри открытых несущих пространственных трубчатых рам-экранов, таким образом, что они видимы со всех внешних сторон и к ним есть доступ.
2. Способ по п. 1, в котором ходовой толкающий винт или ходовые толкающие винты установлены по центру ЛА, на несущей силовой платформе.
3. Способ по п. 1, в котором ходовые толкающие винты установлены слева и справа от борта ЛА.
4. Способ по п. 1, в котором ходовые толкающие винты установлены по центру ЛА, а также слева и справа от борта ЛА.
5. Способ по п. 1, в котором независимо работающие электродвигатели ходовых толкающих винтов установлены на одной общей несущей силовой платформе – раме в виде трубы, и/или на двух отдельных несущих силовых платформах - рамах в виде труб, перпендикулярных продольной оси ЛА, слева и справа от борта ЛА, при этом каждый винт вращается вокруг своей одной горизонтальной оси.
6. Способ по п. 1, в котором независимо работающие электродвигатели передних и задних импеллеров установлены на несущей силовой платформе - раме, выполненной из труб, образуя винтомоторные группы (ВМГ), при этом лопасти каждого импеллера вращаются вокруг своей одной вертикальной оси.
7. Способ по п. 5, в котором количество электродвигателей ходовых толкающих винтов может быть любым и одинаково слева и справа от борта ЛА.
8. Способ по п. 6, в котором количество электродвигателей передних и задних импеллеров может быть любым и одинаково спереди и сзади ЛА.
9. Способ по п. 1, в котором открытые несущие пространственные трубчатые рамы выполнены, например, в виде эллипсоида или параллелепипеда, замкнутого или разомкнутого типа.
10. Способ по п. 1, в котором независимо работающие электродвигатели ходовых толкающих винтов установлены перпендикулярно, спереди и сзади, относительно направления движения ЛА в горизонтальной плоскости, на несущей силовой платформе-раме, противоположно и симметрично относительно друг друга, образуя ходовую толкающую винтомоторную группу (ВМГ), состоящую из соосных пар электродвигателей винтов, при этом винты соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты к внутренним противоположным и симметричным относительно друг друга поверхностям передней и задней, относительно направления движения ЛА в горизонтальной плоскости, трубок открытой несущей пространственной трубчатой рамы, обращенных друг к другу, и не соприкасаются с ними, между винтами соосной пары и внутренними поверхностями трубок рамы находится только воздух.
11. Способ по п. 1, в котором независимо работающие электродвигатели ходовых толкающих винтов установлены на внутренних противоположных и симметричных относительно друг друга поверхностях передней и задней трубок, относительно направления движения ЛА в горизонтальной плоскости, открытой несущей пространственной рамы, обращенных друг к другу, образуя ходовую толкающую винтомоторную группу (ВМГ), состоящую из соосных пар электродвигателей винтов, при этом винты соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты друг к другу, не соприкасаются с открытой несущей пространственной рамой и между винтами соосной пары находится только воздух, при этом открытая несущая пространственная рама-экран установлена на несущей силовой платформе - раме.
12. Способ по п. 10 или 11, в котором ходовая толкающая ВМГ установлена по центру ЛА, в горизонтальной плоскости, перпендикулярной продольной оси ЛА и/или слева и справа от борта ЛА, в горизонтальной плоскости, перпендикулярной продольной оси ЛА.
13. Способ по п. 10 или 11, в котором количество открытых несущих пространственных трубчатых рам с ходовой толкающей ВМГ может быть любым и одинаково с левого и правого борта ЛА.
14. Способ по п. 13, в котором количество соосных пар электродвигателей ходовых толкающих винтов внутри каждой открытой несущей пространственной трубчатой рамы может быть любым в зависимости от ее размера и объема и одинаково слева и справа от борта ЛА, при этом соосные пары внутри каждой открытой несущей пространственной трубчатой рамы расположены в горизонтальной плоскости и на определенном расстоянии друг от друга.
15. Летательный аппарат (ЛА) для вертикального взлета/посадки и горизонтального прямолинейного полета, включающий:
- передние и задние движители или группы передних и задних движителей в окольцовке – импеллеров, для вертикального взлета/посадки, каждый из которых соединен с независимо работающим электродвигателем, установленным в равном количестве, на определенном расстоянии друг от друга, спереди и сзади ЛА по направлению движения ЛА в горизонтальной плоскости, противоположно и симметрично относительно друг друга и продольной оси ЛА;
- дополнительный вспомогательный ходовой толкающий винт или группу дополнительных вспомогательных ходовых толкающих винтов для горизонтального прямолинейного полета, каждый из которых соединен с независимо работающим электродвигателем, установленным на определенном расстоянии друг от друга в горизонтальной плоскости, перпендикулярной продольной оси ЛА, противоположно и симметрично относительно друг друга и продольной оси ЛА, при этом независимо работающие электродвигатели ходовых толкающих винтов установлены внутри открытых несущих пространственных трубчатых рам-экранов таким образом, что они видимы со всех внешних сторон и к ним есть доступ.
16. ЛА по п. 15, в котором ходовой толкающий винт или ходовые толкающие винты установлены по центру ЛА на несущей силовой платформе.
17. ЛА по п. 15, в котором ходовые толкающие винты установлены слева и справа от борта ЛА.
18. ЛА по п. 15, в котором ходовые толкающие винты установлены по центру ЛА, а также слева и справа от борта ЛА.
19. ЛА по п. 15, в котором независимо работающие электродвигатели ходовых толкающих винтов установлены на одной общей несущей силовой платформе в виде трубы и/или на двух отдельных несущих силовых платформах-рамах в виде труб, перпендикулярных продольной оси ЛА, слева и справа от борта ЛА, при этом каждый винт вращается вокруг своей одной горизонтальной оси.
20. ЛА по п. 15, в котором независимо работающие электродвигатели передних и задних импеллеров установлены на несущей силовой платформе-раме, выполненной из труб, образуя подъемные винтомоторные группы (ВМГ), при этом лопасти каждого импеллера вращаются вокруг своей одной вертикальной оси.
21. ЛА по п. 19, в котором количество ходовых толкающих винтов может быть любым и одинаково слева и справа от борта ЛА.
22. ЛА по п. 20, в котором количество передних и задних импеллеров может быть любым и одинаково спереди и сзади ЛА.
23. ЛА по п. 15, в котором открытые несущие пространственные трубчатые рамы выполнены, например, в виде эллипсоида или параллелепипеда, замкнутого или разомкнутого типа.
24. ЛА по п. 15, в котором независимо работающие электродвигатели ходовых толкающих винтов установлены перпендикулярно, спереди и сзади, относительно направления движения ЛА в горизонтальной плоскости, на несущей силовой платформе-раме, противоположно и симметрично относительно друг друга, образуя ходовую толкающую винтомоторную группу (ВМГ), состоящую из соосных пар электродвигателей винтов, при этом винты соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты к внутренним противоположным и симметричным относительно друг друга поверхностям передней и задней, относительно направления движения ЛА в горизонтальной плоскости, трубок открытой несущей пространственной трубчатой рамы, обращенных друг к другу, и не соприкасаются с ними, между винтами соосной пары и внутренними поверхностями трубок рамы находится только воздух.
25. ЛА по п. 15, в котором независимо работающие электродвигатели ходовых толкающих винтов установлены на внутренних противоположных и симметричных относительно друг друга поверхностях передней и задней трубок, относительно направления движения ЛА в горизонтальной плоскости, открытой несущей пространственной рамы, обращенных друг к другу, образуя ходовую толкающую винтомоторную группу (ВМГ), состоящую из соосных пар электродвигателей винтов, при этом винты соосной пары вращаются параллельно друг другу вокруг одной горизонтальной оси, повернуты друг к другу, не соприкасаются с открытой несущей пространственной рамой и между винтами соосной пары находится только воздух, при этом открытая несущая пространственная рама-экран установлена на несущей силовой платформе-раме.
26. ЛА по п. 24 или 25, в котором ходовая толкающая ВМГ установлена по центру ЛА, в горизонтальной плоскости, перпендикулярной продольной оси ЛА, и/или слева и справа от борта ЛА в горизонтальной плоскости, перпендикулярной продольной оси ЛА.
27. ЛА по п. 24 или 25, в котором количество открытых несущих пространственных трубчатых рам с ходовой толкающей ВМГ может быть любым и одинаково с левого и правого борта ЛА.
28. ЛА по п. 27, в котором количество соосных пар электродвигателей ходовых толкающих винтов внутри каждой открытой несущей пространственной трубчатой рамы может быть любым в зависимости от ее размера и объема и одинаково слева и справа от борта ЛА, при этом соосные пары внутри каждой открытой несущей пространственной трубчатой рамы расположены в горизонтальной плоскости и на определенном расстоянии друг от друга.
| CN 204548499 U, 12.08.2015 | |||
| CN 109484634 A, 19.03.2019 | |||
| RU 184662 U1, 02.11.2018 | |||
| CN 110282123 A, 7.09.2019 | |||
| US 6886776 B2, 03.05.2005. |

