Изобретение относится к области авиации, а именно к летательным аппаратам (ЛА) вертикального взлета и посадки, например, мультикоптерам и квадрокоптерам, переносящим пилота на борту.
Из уровня техники известны ЛА, которые используют "балансирное управление", при котором путем смещения тела пилота производится изменение центра масс ЛА, что приводит к управлению по крену/тангажу.
Такое управление наиболее ярко выражено в дельтапланах. Это менее интенсивно применяется и в парапланах.
В дельтаплане используется трапеция, держась за которую пилот смещает тело относительно крыла, управляя таким образом по кренам/тангажу.
В параплане - смещение веса на одно бедро (в сидячей "безрогой" подвеске) приводит к крену (управление парапланом по тангажу производится только клевантами).
Из уровня техники известны способы управления ЛА при помощи ручек управления (см. патенты РФ RU 189484, RU 2571992, RU 2652284).
Недостатками известных технических решений являются:
- ограниченные функциональные возможности;
- невозможность управления ЛА по смещению тела пилота;
- невозможность управления рысканием по аналогии с поворотом мотоциклетного руля;
- невозможность мотоциклетного управления оборотами аналогично "ручке газа".
Из уровня техники известен способ управления летательным аппаратом (см. патент РФ RU 2153441 на изобретение, опубл. 27.07.2000).
Изобретение относится к авиации и касается технологии управления креном, курсом, тангажом и высотой полета легких летательных аппаратов, преимущественно мотодельтапланов.
Способ управления летательным аппаратом включает в себя дебалансирование крыла с помощью момента, плечо которого создают перемещением веса присоединенной массы (тела пилота) относительно центра воздушного давления на крыло в сторону необходимого крена или тангажа. Дебалансирование крыла осуществляют перемещением точки подвеса присоединенной массы (тела пилота) параллельно плоскости крыла. Для управления креном одновременно в плоскости крыла могут перемещать килевую балку.
Недостатками известного из уровня техники способа являются:
- ограниченные функциональные возможности;
- невозможность применения в управлении пилотируемыми дронами;
- отсутствие сопряжения с летным компьютером, что приводит в случае изменения центра масс может быть воспринято летным компьютером дрона как аварийная ситуация, резкое исправление которой может привести к катастрофе;
- отсутствие возможности управления рысканием и оборотами двигателями. Техническими результатами заявленного изобретения являются:
- увеличение функциональных возможностей;
- увеличение безопасности пилотирования, управления и контроля за счет высвобождения больших пальцев рук от пилотирования (управления) за штурвал/руль;
- уменьшение порога вхождения для пилотирования за счет возможности применения навыков управления велосипедом или мотоциклом;
- отказ от стиков (джойстика) для увеличения интуитивности, безопасности, удобства и ясности управления полетом даже в критических ситуациях и перегрузках.
Технические результаты достигаются тем, что система для балансирного управления летательным аппаратом включает:
- датчики на теле или шее или шлеме пилота и на корпусе летательного аппарата;
- бортовой летный компьютер, выполненный с возможностью:
- приема сигналов от датчиков, их обработки, преобразования и передачи на основе обработанных и преобразованных данных и информации, например, о смещениях тела, шеи или шлема пилота и корпуса ЛА относительно центра масс ЛА, что заменяет органы управления по крену/тангажу телом, а рыскание/газ-мото рулем, сигналов для управления электродвигателями несущих винтов и оборотами винтов через бортовой летный компьютер и электронные регуляторы хода (ESC), при этом на основе управляющего сигнала производится равномерное перераспределение или увеличение, в случае необходимости, тяги к электродвигателям несущих винтов, увеличивая при этом скорость их работы для выполнения необходимого смещения и маневра;
- управления скоростями вращения каждого отдельного независимого несущего винта с поправкой на положение тела, шеи или шлема пилота;
- контроля соответствия заданному режиму работы;
- обеспечения синхронной работы электродвигателей несущих винтов;
- выдачи всей необходимой информации пилоту.
- выдачи всей необходимой информации пилоту.
Признаки и сущность заявленного изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами (см. фигуры 1 и 2), где показано следующее:
На фигуре 1 - летательный аппара (вид сверху).
На фигуре 2 - летательный аппарат (вид сбоку).
На фигурах 1 и 2 обозначено следующее:
1 - бортовой летный компьютер;
2 - ручка газа руля;
3 - кресло пилота;
4 - датчик, установленный на шее пилота;
5 - датчик, установленный на корпусе аппарата;
6 - датчик, установленный на шлеме пилота.
Перед вылетом на тело или шлем или шею пилота крепится датчик (4), (5) или (6), аналогичный датчик закрепляется на корпусе летательного аппарата (5). Бортовой летный компьютер (1) принимает и обрабатывает сигналы от датчиков (4), (5) или (6), определяя разницу показателей и определяя таким образом амплитуду и скорость отклонения пилота от центра масс ЛА. Полученные данные отправляются на электронные регуляторы хода (ESC) таким образом, как и при передаче данных со стика Roll/Pitch, но с установленными заранее коэффициентами для удобства использования пилотом. Датчик на шлеме (6) или на или теле или шее (4) пилота перемещается вместе с движениями пилота и фиксируют смещение пилота относительно центра масс ЛА. Поворот руля является управлением летательного аппарата вокруг вертикальной оси, иначе говоря "по - рысканию". При повороте ручки газа (2) на руле на себя происходит увеличение подачи тока в электронный регулятор хода (ESC), что приводит к увеличению оборотов и тяги. Обратный процесс происходит при вращении ручки газа (2) на руле от себя.
Стрелками (см. фиг. 1 и 2) показаны направления смещения пилота: вперед, назад, влево, вправо. При смещениях пилота происходит изменение центра масс ЛА, что является органом управления: смещения вперед-назад приводят к изменению тангажа, соответственно, вниз-вверх. Смещения влево-вправо - приводят к соответствующим изменениям левого и правого крена (наклон влево увеличивает левый крен и наоборот).
Помимо простого перемещения пилота, датчики на шлеме или шее (6) или (4) пилота и на корпусе (5) также фиксируют изменения положения, которые передаются в бортовой летный компьютер для синхронизации. После приема сигнала о смещении пилота, бортовой летный компьютер (1) выполнен с возможностью функционирования согласно заранее заданной программе и алгоритму в двух режимах:
- летательный аппарат стабилизируется для автоматического управления вне зависимости от смещений пилота, либо
- подчиняется смещениям пилота, усиливая действие изменения центра масс относительно ЛА при помощи соответствующего изменения подачи тока на электронные регуляторы хода (ESC) и моторы.
В заявленной системе производится замена стиков джойстика стандартным управлением мотоцикла: стик управления Roll / Pitch заменяется перемещением корпуса пилота. Ручка газа на руле - Throttle. Поворот рулем - Yaw. При этом, полет при использовании системы для пилота будет напоминать езду на мотоцикле.
Система выполнена с возможностью выполнения роли гироскопической прецессии, возникающей в колесах мотоциклов и велосипедов в процессе езды (сила, сопротивляющаяся отклонениям по вертикали), поэтому смещение тела пилота приводит к аналогичным мотоциклу ощущениям и принципам управления.
При этом, в заявленной системе не требуется набегающий поток воздуха, так как ЛА, например, квадрокоптер или мультикоптер зависает в воздухе на пропеллерах.
Проведенный анализ уровня техники позволил установить: аналоги с совокупностью существенных признаков, тождественных и идентичных существенным признакам заявленной системе отсутствуют, что указывает на соответствие условию патентоспособности «новизна».
Результаты поиска известных решений с целью выявления существенных признаков, совпадающих с отличительными от аналогов существенными признаками заявленного изобретения, показали, что они не следуют явным образом из уровня техники, а также не установлена известность влияния отличительных существенных признаков на указанный авторами технические результаты.
Следовательно, заявленное изобретение соответствует условию патентоспособности «изобретательский уровень».
На данный момент изготовлен опытный образец и успешно проведены испытания летательного аппарата.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система безопасности летательного аппарата вертикального взлета и посадки | 2019 |
|
RU2728451C1 |
| СПОСОБ АВАРИЙНОЙ ПОСАДКИ КВАДРОКОПТЕРА | 2017 |
|
RU2657659C1 |
| Система гиростабилизации кабины пилотируемого летательного аппарата (ЛА) | 2019 |
|
RU2728221C1 |
| Мультикоптер вертикального взлета и посадки с импеллерными движителями | 2020 |
|
RU2761991C2 |
| Устройство для управления пилотируемым летательным аппаратом вертикального взлета и посадки | 2019 |
|
RU2722651C1 |
| Малогабаритный летательный аппарат (ЛА) вертикального взлета/посадки с увеличенной дальностью полета | 2017 |
|
RU2681464C1 |
| ЕДИНЫЙ АЭРОНАЗЕМНЫЙ ДВИЖИТЕЛЬ ЛЕТАТЕЛЬНОГО АППАРАТА | 2019 |
|
RU2735442C1 |
| РАМА МУЛЬТИКОПТЕРА (ВАРИАНТЫ) | 2017 |
|
RU2657650C1 |
| СИСТЕМА ДЛЯ УВЕЛИЧЕНИЯ ПРОДОЛЖИТЕЛЬНОСТИ И ДАЛЬНОСТИ ПОЛЕТА МУЛЬТИКОПТЕРА | 2017 |
|
RU2657666C1 |
| СПОСОБ УПРАВЛЕНИЯ КОНВЕРТОПЛАНОМ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ | 2022 |
|
RU2795885C1 |

Система для балансирного управления летательным аппаратом содержит датчики на теле, или шее, или шлеме пилота и на корпусе летательного аппарата, бортовой летный компьютер, выполненный с возможностью управления электродвигателями несущих винтов определенным образом на основе данных датчиков. Обеспечивается увеличение интуитивности, безопасности, удобства и ясности управления полетом. 2 ил.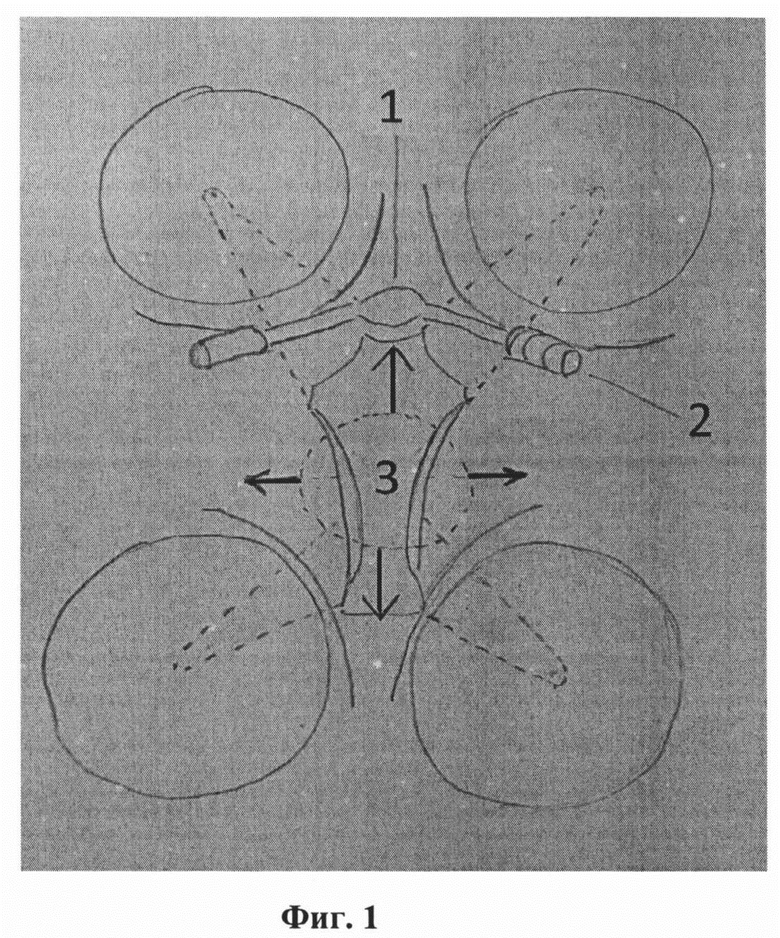
Система для балансирного управления летательным аппаратом, включающая:
- датчики на теле, или шее, или шлеме пилота и на корпусе летательного аппарата;
- бортовой летный компьютер, выполненный с возможностью:
- приема сигналов от датчиков, их обработки, преобразования и передачи на основе обработанных и преобразованных данных и информации, например, о смещениях тела, шеи или шлема пилота и корпуса ЛА относительно центра масс ЛА, что заменяет органы управления по крену/тангажу телом, а рыскание/газ-мото рулем, сигналов для управления электродвигателями несущих винтов и оборотами винтов через бортовой летный компьютер и электронные регуляторы хода (ESC), при этом на основе управляющего сигнала производится равномерное перераспределение или увеличение, в случае необходимости, тяги к электродвигателям несущих винтов, увеличивая при этом скорость их работы для выполнения необходимого смещения и маневра;
- управления скоростями вращения каждого отдельного независимого несущего винта с поправкой на положение тела, шеи или шлема пилота;
- контроля соответствия заданному режиму работы;
- обеспечения синхронной работы электродвигателей несущих винтов;
- выдачи всей необходимой информации пилоту.
| US 0005252068 A1, 12.10.1993 | |||
| US 0009878802 B2, 30.01.2018 | |||
| RU 2011120142 A, 27.11.2012 | |||
| СПОСОБ КОНТРОЛЯ СОСТОЯНИЯ изоляции | 0 |
|
SU189484A1 |
| US 0005841408 A1, 24.11.1998. | |||

