Область техники, к которой относится изобретение
[0001] Настоящее изобретение относится к способу сохранения предыстории движения, к способу формирования модели траектории движения, к способу оценки собственной позиции и к оборудованию для сохранения предыстории движения.
Уровень техники
[0002] Чтобы выполнять моделирование структуры перекрестка дороги, известна технология, которая включает в себя управление транспортным средством для сбора данных таким образом, чтобы двигаться и собирать информацию дорог/полос движения и информацию траектории транспортного средства, определение позиций узлов на полосе движения из собранных данных и ассоциирование информации траектории транспортного средства с отрезком между упомянутыми определенными позициями узлов на полосе движения (см., например патентный документ 1: JP2016-75905A).
Документы предшествующего уровня техники
Патентные документы
[0003] Патентный документ 1. JP2016-75905A
Сущность изобретения
Задачи, решаемые изобретением
[0004] На практике, один и тот же отрезок может включать в себя два или более типов предысторий движения, имеющих различные позиции проезда транспортного средства и/или различные скорости транспортного средства, к примеру, когда транспортное средство движется прямо вперед и когда транспортное средство поворачивает направо. В таком случае, если два или более типов предысторий движения, существующих в одном и том же отрезке, сохраняются в устройстве хранения без сортировки, точность процесса с использованием предысторий движения (к примеру, процесса оценки собственной позиции движущегося транспортного средства или процесса формирования модели траектории движения транспортного средства) может ухудшаться.
[0005] Проблема, которая должна разрешаться посредством настоящего изобретения, заключается в том, чтобы предоставлять способ и оборудование для сохранения предыстории движения, которые позволяют повышать точность процесса с использованием предысторий движения транспортного средства, сохраненных в устройстве хранения.
Средство решения задач
[0006] Настоящее изобретение разрешает вышеуказанную проблему посредством определения того, что одна или более предысторий движения в отрезке представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения, и сохранения двух или более типов предысторий движения в отрезке в устройстве хранения таким образом, что они сортируются для определенных двух или более типов.
Преимущества изобретения
[0007] Согласно настоящему изобретению, два или более типов предысторий движения, которые определяются в качестве различных типов предысторий движения, сохраняются в устройстве хранения таким образом, что они сортируются, и в силу этого такие процессы, как процесс оценки собственной позиции движущегося транспортного средства, могут выполняться с использованием предыстории движения в соответствии с фактической траекторией движения транспортного средства. В силу этого можно повышать точность процесса с использованием предысторий движения транспортного средства, сохраненных в устройстве хранения.
Краткое описание чертежей
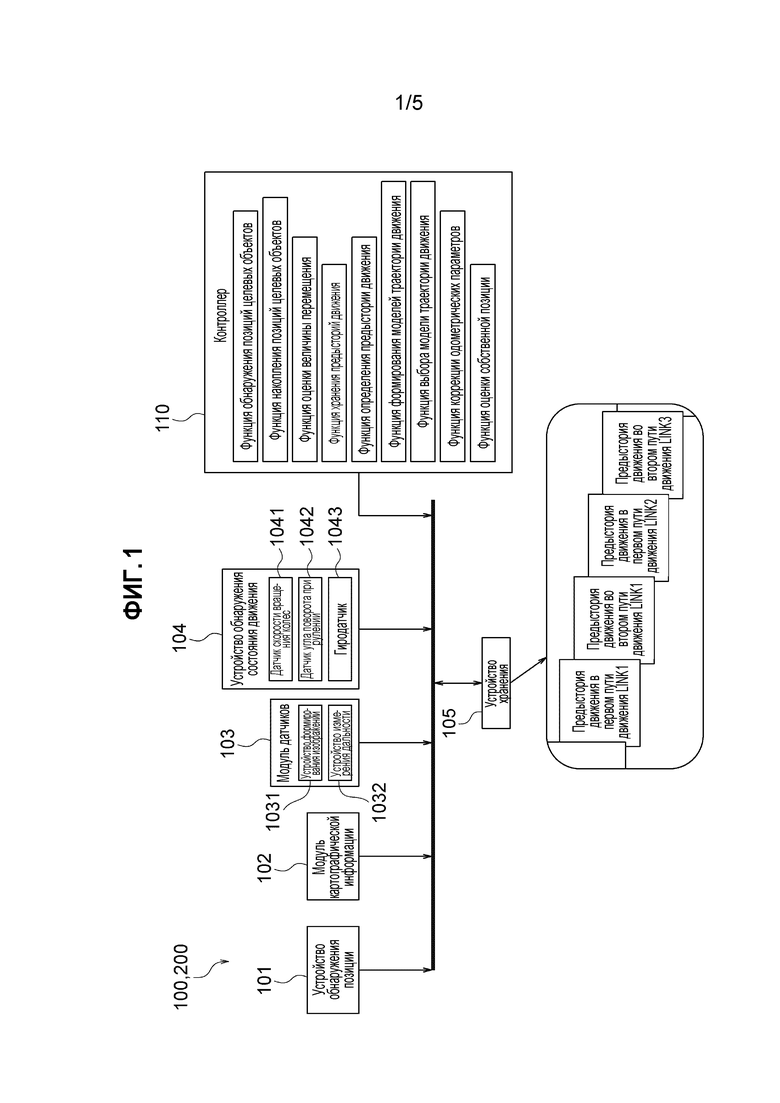
[0008] Фиг. 1 является блок-схемой, иллюстрирующей схематичную конфигурацию системы хранения предысторий движения согласно одному или более вариантов осуществления настоящего изобретения и системы оценки собственной позиции, к которой применяется система хранения предысторий движения.
Фиг. 2 является схемой для описания примера способа сохранения предысторий движения.
Фиг. 3 является схемой для описания другого примера способа сохранения предысторий движения.
Фиг. 4 является блок-схемой последовательности операций для описания способа формирования моделей траектории движения согласно одному или более вариантов осуществления настоящего изобретения.
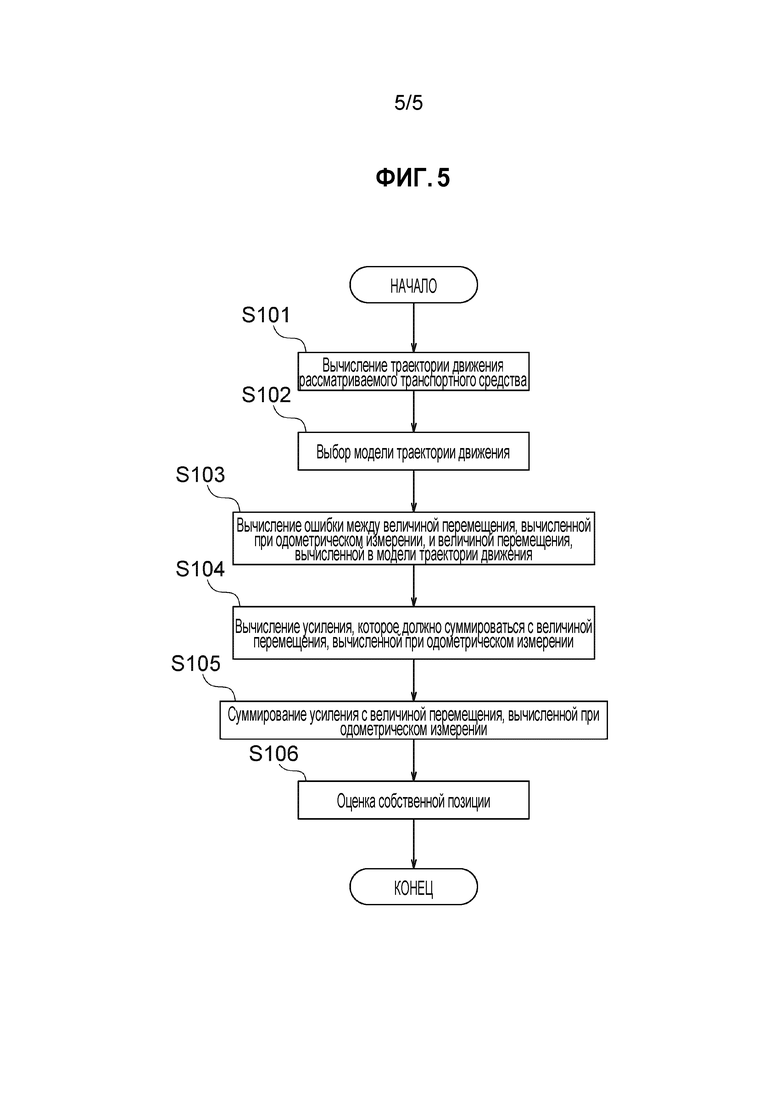
Фиг. 5 является блок-схемой последовательности операций для описания способа оценки собственной позиции согласно одному или более вариантов осуществления настоящего изобретения.
Оптимальный режим осуществления изобретения
[0009] В дальнейшем в этом документе, описываются один или более вариантов осуществления настоящего изобретения со ссылкой на чертежи. Фиг. 1 является блок-схемой, иллюстрирующей схематичную конфигурацию системы 100 хранения предысторий движения согласно одному или более вариантов осуществления настоящего изобретения и системы 200 оценки собственной позиции, к которой применяется система 100 хранения предысторий движения. Система 100 хранения предысторий движения, проиллюстрированная на чертеже, представляет собой систему, которая сохраняет предыстории движения, такие как позиции проезда и скорости транспортного средства для транспортного средства, которые собираются из транспортного средства. С другой стороны, система 200 оценки собственной позиции представляет собой систему, которая оценивает собственную позицию транспортного средства, когда выполняется помощь при вождении либо автоматизированное или автономное вождение транспортного средства.
[0010] Система 100 хранения предысторий движения и система 200 оценки собственной позиции (которые могут в дальнейшем называться "системами согласно одному или более вариантов осуществления настоящего изобретения") включают в себя устройство 101 обнаружения позиции, модуль 102 картографической информации, модуль 103 датчиков, устройство 104 обнаружения состояния движения, устройство 105 хранения и контроллер 110. В системах согласно одному или более вариантов осуществления настоящего изобретения, устройство 101 обнаружения позиции, модуль 102 картографической информации, модуль 103 датчиков, устройство 104 обнаружения состояния движения, устройство 105 хранения и контроллер 110 установлены в транспортном средстве и соединены друг с другом через бортовую LAN 106, к примеру, контроллерную сеть (CAN). Может быть необязательным устанавливать часть 102 картографической информации, устройство 105 хранения и контроллер 110 в транспортном средстве, и они могут предоставляться в центре обработки и хранения и т.п., соединенном с бортовым оборудованием через сеть связи.
[0011] Устройство 101 обнаружения позиции, которое включает в себя приемное устройство на основе глобальной системы позиционирования (GPS), установленное в транспортном средстве, принимает радиоволны из GPS-спутников и обнаруживает текущую позицию (широту/долготу). Как описано ниже, подробная позиция транспортного средства на отрезке между узлами оценивается посредством системы 200 оценки собственной позиции, и точность обнаружения позиции посредством устройства 101 обнаружения позиции ниже точности оценки позиции посредством системы 200 оценки собственной позиции.
[0012] Модуль 102 картографической информации включает в себя базу данных, которая сохраняет картографическую информацию, информацию дороги и другую необходимую информацию. Картографическая информация представляет собой так называемую электронную карту, которая представляет информацию, в которой широта и долгота ассоциированы с картографической информацией. Картографическая информация включает в себя информацию дороги, ассоциированную с каждой точкой, позиционную информацию целевых объектов и другую необходимую информацию. Информация дороги задается посредством узлов и отрезков, соединяющих узлы. Информация дороги дополнительно включает в себя информацию относительно перекрестков и точек разветвления. Перекрестки и точки разветвления ассоциированы с узлами и отрезками.
[0013] Модуль 103 датчиков включает в себя устройство 1031 формирования изображений, такое как широкоугольная камера, и устройство 1032 измерения дальности, такое как лазерный дальномер (LRF), или другие аналогичные устройства. Устройство 1031 формирования изображений и устройство 1032 измерения дальности предоставляются на капоте, бампере, номерном знаке, передних фарах, боковом зеркале либо на периферии. Устройство 1031 формирования изображений захватывает изображения рядом с рассматриваемым транспортным средством. Устройство 1032 измерения дальности испускает электромагнитные волны в окрестности рассматриваемого транспортного средства и обнаруживает отраженные волны. Информация обработки изображений, полученная посредством устройства 1031 формирования изображений, и информация дальности, полученная посредством устройства 1032 измерения дальности, выводятся в контроллер 110. Контроллер 110 имеет функцию обнаружения позиций целевых объектов и обнаруживает относительную позицию между рассматриваемым транспортным средством и целевым объектом, существующим рядом с рассматриваемым транспортным средством, на основе информации обработки изображений, выводимой из устройства 1031 формирования изображений, и информации дальности, выводимой из устройства 1032 измерения дальности. Контроллер 110 дополнительно имеет функцию накопления позиций целевых объектов и накапливает информацию относительно относительной позиции между обнаруженным целевым объектом и рассматриваемым транспортным средством в устройстве 105 хранения таким образом, что она ассоциирована с картографической информацией. Здесь, примеры целевого объекта включают в себя линию (к примеру, разделительную линию) на поверхности проезжей дороги, по которой движется рассматриваемое транспортное средство, бордюрный камень на обочине дороги и дорожное ограждение.
[0014] Устройство 104 обнаружения состояния движения включает в себя датчик 1041 скорости вращения колес, датчик 1042 угла поворота при рулении, гиродатчик 1043 и т.п. Датчик 1041 скорости вращения колес формирует предварительно определенное число импульсов каждый раз, когда колесо рассматриваемого транспортного средства осуществляет одно вращение, и выводит сформированные импульсы в контроллер 110. Датчик 1042 угла поворота при рулении, который предоставляется на рулевой колонке, определяет угол поворота при рулении, который представляет собой текущий угол вращения (рабочую величину руления) руля, и выводит определенный угол поворота при рулении в контроллер 110. Гиродатчик 1043 определяет угловую скорость относительно вертикальной оси, возникающую в рассматриваемом транспортном средстве, и выводит определенную угловую скорость относительно вертикальной оси в контроллер 110. Контроллер 110 имеет функцию оценки величины перемещения и оценивает величину ΔP перемещения рассматриваемого транспортного средства из предыдущего цикла обработки в каждом предварительно определенном цикле на основе различных параметров, которые выводятся из датчика 1041 скорости вращения колес, датчика 1042 угла поворота при рулении и гиродатчика 1043. Вычисление оценки величины ΔP перемещения рассматриваемого транспортного средства соответствует одометрическому измерению, которое описывается ниже, и различные параметры, которые выводятся из датчика 1041 скорости вращения колес, датчика 1042 угла поворота при рулении и гиродатчика 1043, соответствуют параметрам, используемым при одометрическом измерении (в дальнейшем называемым "одометрическими параметрами").
[0015] Устройство 105 хранения включает в себя одно или более оперативных запоминающих устройств (RAM), которые служат в качестве доступного устройства хранения. Контроллер 110 имеет функцию хранения предысторий движения и управляет устройством 105 хранения таким образом, чтобы сохранять информацию относительно скорости вращения колес, угла поворота при рулении и угловой скорости относительно вертикальной оси, выводимую из устройства 104 обнаружения состояния движения, величину ΔP перемещения рассматриваемого транспортного средства, оцененную с использованием функции оценки величины перемещения, и позицию и тип целевого объекта, выводимые из модуля 103 датчиков, таким образом, что они ассоциированы с позицией рассматриваемого транспортного средства, обнаруженной посредством устройства 101 обнаружения позиции. Здесь, предыстория движения, сохраненная в устройстве 105 хранения, включает в себя информацию относительно скорости вращения колес, угла поворота при рулении и угловой скорости относительно вертикальной оси, выводимую из устройства 104 обнаружения состояния движения, величину ΔP перемещения рассматриваемого транспортного средства, оцененную с использованием функции оценки величины перемещения, и позицию и тип целевого объекта, выводимые из модуля 103 датчиков, и информацию относительно других состояний движения рассматриваемого транспортного средства.
[0016] Контроллер 110 имеет функцию определения предыстории движения. Когда два или более типов предысторий движения, в который позиции проезда транспортного средства, скорости транспортного средства, ориентации транспортного средства и т.п. отличаются друг от друга, существуют таким образом, что они соответствуют одному и тому же отрезку, контроллер 110 определяет два или более типов предысторий движения. Функция определения предыстории движения контроллера 110 служит для того, чтобы указывать собственную позицию рассматриваемого транспортного средства в картографической информации в каждом предварительно определенном цикле на основе величины ΔP перемещения рассматриваемого транспортного средства из предыдущего цикла обработки, оцененной с использованием функции оценки величины перемещения, относительной позиции между рассматриваемым транспортным средством и целевым объектом, обнаруженной с использованием функции обнаружения позиций целевых объектов, и картографической информации, ассоциированной с позиционной информацией целевого объекта. Затем функция определения предыстории движения контроллера 110 служит для того, чтобы обращаться к информации дороги (например, ширине дороги, ширине полосы движения, позиции полосы движения на дороге, структуре дороги, такой как разветвление/слияние или перекресток, и т.д.), включенной в картографическую информацию, и определять предысторию движения рассматриваемого транспортного средства на основе информации дороги и смещения (величины перемещения, направления движения и т.д.) собственной позиции рассматриваемого транспортного средства из предыдущего цикла обработки и из дополнительных предыдущих циклов обработки. Эта предыстория движения включает в себя позицию проезда рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке, скорость рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке и ориентацию (направление) рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке в качестве параметров.
[0017] Для двух или более предысторий движения, имеющих разность в предварительно определенное пороговое значение или более в позиции проезда рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что две или более предысторий движения представляют собой различные типы предысторий движения. В дополнение или альтернативно, для двух или более предысторий движения, имеющих разность в предварительно определенное пороговое значение или более в скорости рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что две или более предысторий движения представляют собой различные типы предысторий движения. В дополнение или альтернативно, для двух или более предысторий движения, имеющих разность в предварительно определенное пороговое значение или более в угле рыскания рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что две или более предысторий движения представляют собой различные типы предысторий движения. Здесь, когда, по меньшей мере, одно из позиции проезда рассматриваемого транспортного средства, скорости рассматриваемого транспортного средства и угла рыскания рассматриваемого транспортного средства удовлетворяет условию соответствия предварительно определенному пороговому значению или более, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что две или более предысторий движения представляют собой различные типы предысторий движения. Например, когда две или более предысторий движения не имеют разности в соответствующее предварительно определенное пороговое значение или более в позиции проезда рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке, но имеют разность в соответствующее предварительно определенное пороговое значение или более в скорости рассматриваемого транспортного средства в одной и той же полосе движения и в одном и том же отрезке, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что две или более предысторий движения представляют собой различные типы предысторий движения.
[0018] В дополнение или альтернативно, когда пути движения отличаются впереди от точки разветвления или перекрестка, к примеру, при движении по прямой вперед и при повороте направо или налево (см. фиг. 2), функция определения предыстории движения другой формы контроллера 110 служит для того, чтобы определять то, что, для предысторий движения в отрезке до точки разветвления или перекрестка, предыстория движения, соответствующая первому пути движения, и предыстория движения, соответствующая второму пути движения, представляют собой различные типы предысторий движения. В дополнение или альтернативно, когда позиции движения отличаются в полосе движения впереди от точки разветвления или перекрестка, к примеру, слева, около центра, справа и т.п. на полосе движения (см. фиг. 3), функция определения предыстории движения другой формы контроллера 110 служит для того, чтобы определять то, что, для предысторий движения в каждом из отрезка до точки разветвления или перекрестка и отрезка впереди от точки разветвления или перекрестка, предыстория движения, когда позиция движения в полосе движения впереди находится слева, предыстория движения, когда позиция движения в полосе движения впереди около центра, и предыстория движения, когда позиция движения в полосе движения впереди находится справа, представляют собой различные типы предысторий движения.
[0019] Когда два или более типов предысторий движения определяются с использованием функции определения предыстории движения, функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два или более типов предысторий движения в одном и том же отрезке таким образом, что они сортируются для определенных двух или более типов. Ниже описываются примеры способов сохранения предысторий движения.
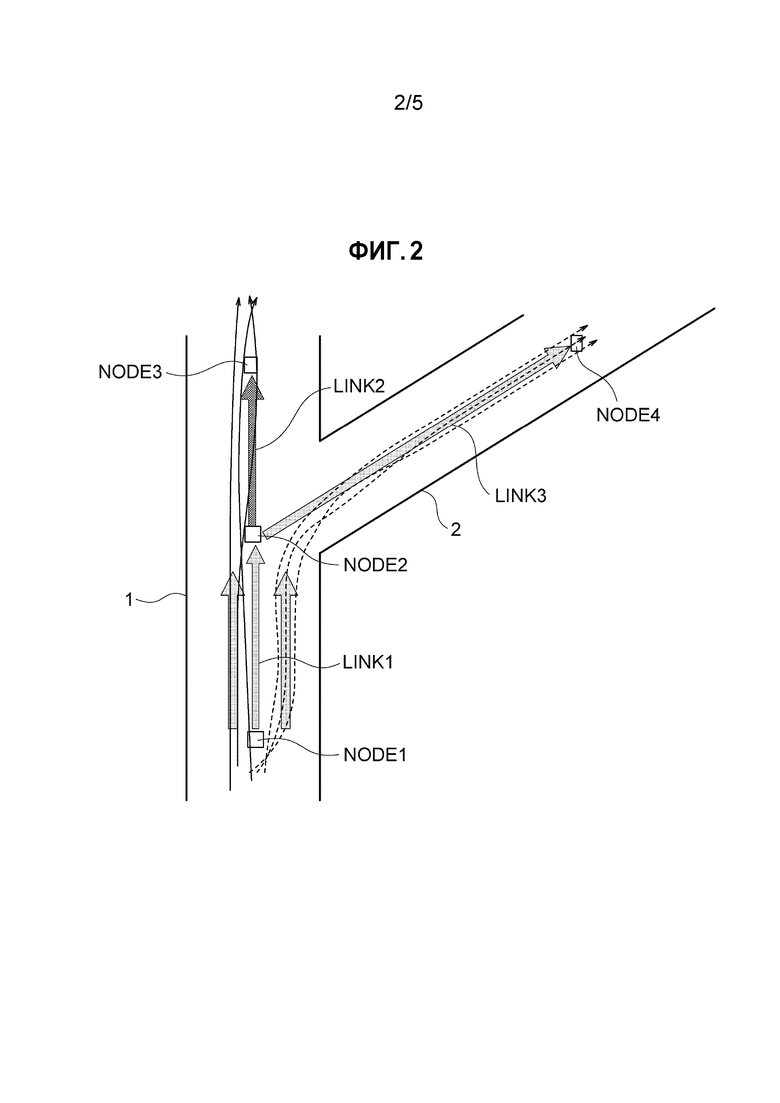
[0020] Фиг. 2 является схемой для описания примера способа сохранения предысторий движения. В дальнейшем описывается способ сохранения предысторий движения со ссылкой на примерную ситуацию, в которой, как проиллюстрировано на чертеже, существуют полоса 1 движения для движения по прямой вперед и полоса 2 движения, ответвляющаяся из полосы 1 движения. На чертеже, сплошные стрелки представляют траектории движения транспортного средства, движущегося по прямой вперед, в то время как пунктирные стрелки представляют траектории движения транспортного средства, поворачивающего направо. В этом примере, полоса 1 движения задается с NODE1, NODE2 и NODE3, указываемыми посредством квадратов на чертеже, и полоса 2 движения задается с NODE4, указываемым посредством квадрата на чертеже. NODE2 задается в качестве точки разветвления, NODE1 задается на вышележащей стороне от точки разветвления в направлении движения транспортного средства, и NODE3 задается на нижележащей стороне от точки разветвления в направлении движения транспортного средства. В нижеприведенном описании, отрезок между NODE1 и NODE2 называется "LINK1", отрезок между NODE2 и NODE3 называется "LINK2", и отрезок между NODE2 и NODE4 называется "LINK3".
[0021] Как проиллюстрировано на фиг. 2, транспортное средство, движущееся по прямой вперед, и транспортное средство, поворачивающее направо, придерживаются различных траекторий движения в LINK1 до точки разветвления (NODE2). В частности, позиция проезда в LINK1 транспортного средства, движущегося по прямой вперед, расположена около центра полосы 1 движения, в то время как позиция проезда в LINK1 транспортного средства, поворачивающего направо, находится справа на полосе 1 движения. В дополнение, скорость в LINK1 транспортного средства, поворачивающего направо, меньше скорости в LINK1 транспортного средства, движущегося по прямой вперед.
[0022] В такой ситуации, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что два типа предысторий движения, имеющих разность в предварительно определенное пороговое значение или более в позициях проезда транспортного средства в LINK1, представляют собой два различных типа предысторий движения. В дополнение или альтернативно, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что два типа предысторий движения, имеющих разность в предварительно определенное пороговое значение или более в скоростях транспортного средства в LINK1, представляют собой два различных типа предысторий движения. Функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два типа предысторий движения, имеющих разность позиций проезда и/или скорости в LINK1, таким образом, что они сортируются для типов.
[0023] В дополнение или альтернативно, для предысторий движения в LINK1 на вышележащей стороне от точки разветвления (NODE2), функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что предыстория движения, соответствующая пути движения для движения по прямой вперед, и предыстория движения, соответствующей пути движения для поворота направо, представляют собой два различных типа предысторий движения. Функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два типа предысторий движения, имеющих разность направлений движения впереди от точки разветвления, так что предыстории движения ассоциированы с LINK1 и сортируются для направлений движения.
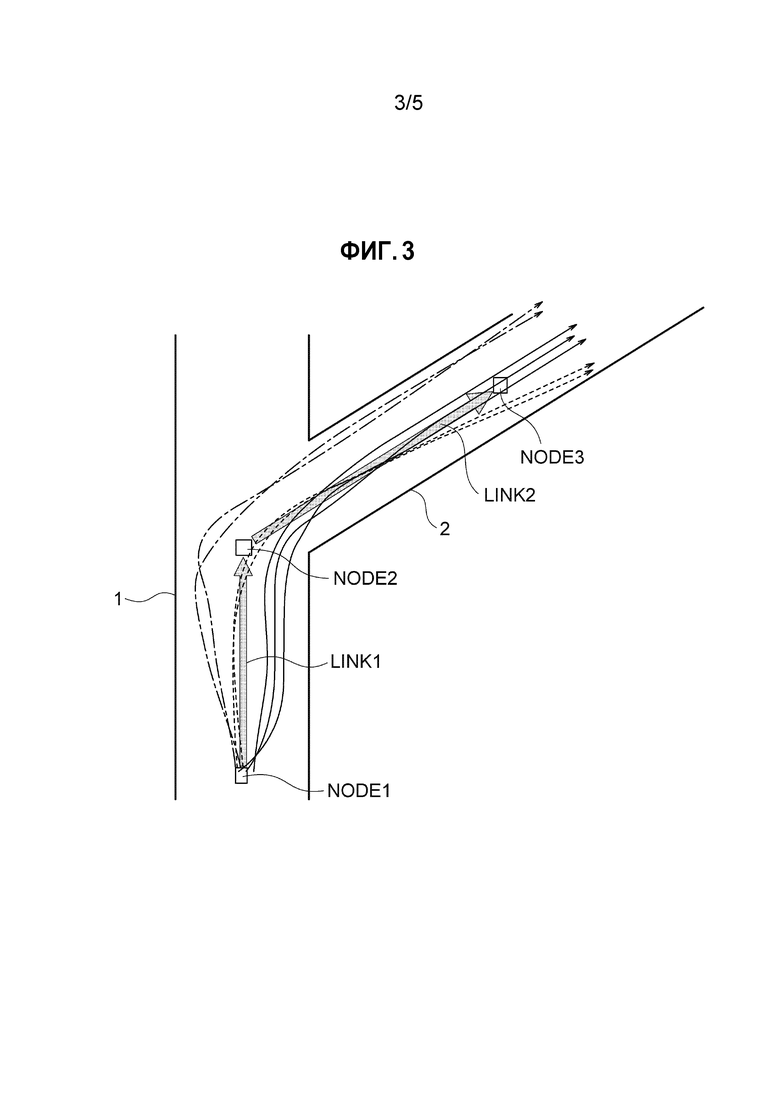
[0024] Фиг. 3 является схемой для описания другого примера способа сохранения предысторий движения. В дальнейшем описывается способ сохранения предысторий движения со ссылкой на примерную ситуацию, в которой, как проиллюстрировано на чертеже, существуют полоса 1 движения для движения по прямой вперед и полоса 2 движения, ответвляющаяся из полосы 1 движения в точке разветвления, и две или более позиций движения существуют в полосе 2 движения впереди от точки разветвления, к примеру, позиция движения налево (в дальнейшем называемая "позицией 1 движения"), позиция движения приблизительно в центр (в дальнейшем называемая "позицией 2 движения") и позиция движения направо (в дальнейшем называемая "позицией 3 движения"). На чертеже, сплошные стрелки представляют предыстории движения транспортного средства, движущегося приблизительно в центр полосы 2 движения (в позицию 2 движения), пунктирные стрелки представляют предыстории движения транспортного средства, движущегося вправо на полосе 2 движения (в позицию 3 движения), и штрихпунктирные стрелки представляют предыстории движения транспортного средства, движущегося влево на полосе 2 движения (в позицию 1 движения). В этом примере, полоса 1 движения для движения по прямой вперед задается с NODE1 и NODE2, указываемыми посредством квадратов на чертеже, и полоса 2 движения задается с NODE3, указываемым посредством квадрата на чертеже. NODE2 задается в качестве точки разветвления, NODE1 задается на вышележащей стороне точки разветвления в направлении движения транспортного средства, и NODE3 задается на нижележащей стороне точки разветвления в направлении движения транспортного средства. В нижеприведенном описании, отрезок между NODE1 и NODE2 называется "LINK1", и отрезок между NODE2 и NODE3 называется "LINK2".
[0025] Как проиллюстрировано на фиг. 3, транспортное средство, движущееся к позиции 1 движения, транспортное средство, движущееся к позиции 2 движения, и транспортное средство, движущееся к позиции 3 движения, придерживаются различных траекторий движения в LINK1 до точки разветвления (NODE2). В частности, позиция проезда в LINK1 транспортного средства, движущегося к позиции 1 движения, изменяется с позиции около центра полосы 1 движения на позицию влево, позиция проезда в LINK1 транспортного средства, движущегося к позиции 2 движения, изменяется с позиции около центра полосы 2 движения на позицию вправо, и позиция проезда в LINK1 транспортного средства, движущегося к позиции 3 движения, расположена около центра полосы 1 движения. В дополнение, скорость в LINK1 транспортного средства, движущегося к позиции 1 движения, например, больше скорости в LINK1 транспортного средства, движущегося к позиции 2 или 3 движения.
[0026] В такой ситуации, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что три типа предысторий движения, имеющих разности относительно в предварительно определенное пороговое значение или более в позициях проезда транспортного средства в LINK1, представляют собой три различных типа предысторий движения. В дополнение или альтернативно, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что два или три типа предысторий движения, имеющих разность или разности в предварительно определенное пороговое значение или более в скоростях транспортного средства в LINK1, представляют собой два или три различных типа предысторий движения. Затем функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два или три типа предысторий движения, имеющих разность или разности позиций проезда и/или скорости в LINK1, таким образом, что они сортируются для типов.
[0027] В дополнение или альтернативно, для предысторий движения в LINK1 на вышележащей стороне от точки разветвления (NODE2), функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что предыстория движения, соответствующая транспортному средству, движущемуся к позиции 1 движения, предыстория движения, соответствующая транспортному средству, движущемуся к позиции 2 движения, и предыстория движения, соответствующая транспортному средству, движущемуся к позиции 3 движения, представляют собой три различных типа предысторий движения. Затем функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять три типа предысторий движения, имеющих разности позиций движения впереди от точки разветвления, таким образом, что предыстории движения ассоциированы с LINK1 и сортируются для позиций движения.
[0028] Как проиллюстрировано на фиг. 3, транспортное средство, движущееся к позиции 1 движения, транспортное средство, движущееся к позиции 2 движения, и транспортное средство, движущееся к позиции 3 движения, придерживаются различных траекторий движения в LINK2 впереди от точки разветвления (NODE2). В частности, позиция проезда в LINK2 транспортного средства, движущегося к позиции 1 движения, расположена слева на полосе 1 движения, позиции проезда в LINK2 транспортного средства, движущегося к позиции 2 движения, изменяется с позиции справа на полосе 1 движения на позицию около центра, и позиция проезда в LINK2 транспортного средства, движущегося к позиции 3 движения, изменяется с позиции около центра полосы 1 движения на позицию справа. В дополнение, скорость в LINK2 транспортного средства, движущегося к позиции 1 движения, например, больше скорости в LINK2 транспортного средства, движущегося к позиции 2 или 3 движения.
[0029] В такой ситуации, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что три типа предысторий движения, имеющих разности относительно в предварительно определенное пороговое значение или более в позициях проезда транспортного средства в LINK2, представляют собой три различных типа предысторий движения. В дополнение или альтернативно, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что два или три типа предысторий движения, имеющих разность или разности в предварительно определенное пороговое значение или более в скоростях транспортного средства в LINK2, представляют собой два или три различных типа предысторий движения. Затем функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два или три типа предысторий движения, имеющих разность или разности позиций проезда и/или скорости в LINK2, таким образом, что они сортируются для типов.
[0030] В дополнение или альтернативно, для предысторий движения в LINK2 впереди от точки разветвления, функция определения предыстории движения контроллера 110 служит для того, чтобы определять то, что предыстория движения, соответствующая транспортному средству, движущемуся к позиции 1 движения, предыстория движения, соответствующая транспортному средству, движущемуся к позиции 2 движения, и предыстория движения, соответствующая транспортному средству, движущемуся к позиции 3 движения, представляют собой три различных типа предысторий движения. Функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять три типа предысторий движения, имеющих разности позиций движения впереди от точки разветвления, таким образом, что предыстории движения ассоциированы с LINK2 и сортируются для позиций движения.
[0031] Как проиллюстрировано на фиг. 1, контроллер 110 имеет функцию формирования моделей траектории движения и формирует модель траектории движения для каждой из различных предысторий движения, сохраненных в устройстве 105 хранения. Модель траектории движения представляет собой компоновку в форме временных рядов позиций проезда, скорости и т.п. рассматриваемого транспортного средства. Например, анализ главных компонентов выполняется для предысторий движения, сохраненных в устройстве 105 хранения, и модель траектории движения задается с использованием обнаруженных главных составляющих векторов. Модель траектории движения включает в себя, по меньшей мере, позиции проезда и скорости рассматриваемого транспортного средства. В одном или более вариантов осуществления настоящего изобретения, модель траектории движения дополнительно включает в себя ориентации, направления и углы скольжения рассматриваемого транспортного средства. Углы скольжения могут оцениваться из скоростей транспортного средства и/или ориентаций транспортного средства.
[0032] Здесь, когда два или более типов предысторий движения существуют в одном и том же отрезке, два или более типов моделей траектории движения формируются для одного и того же отрезка. Затем функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два или более типов моделей траектории движения, сформированных с использованием функции формирования моделей траектории движения, таким образом, что модели траектории движения ассоциированы с отрезком и сортируются для типов.
[0033] Контроллер 110 имеет функцию выбора модели траектории движения, функцию коррекции одометрических параметров и функцию оценки собственной позиции. Во время выполнения помощи при вождении или автоматизированного или автономного вождения (этот режим выполнения в дальнейшем называется "онлайновым режимом"), функция выбора модели траектории движения контроллера 110 служит для того, чтобы вычислять траекторию движения рассматриваемого транспортного средства на основе позиций рассматриваемого транспортного средства, обнаруженных посредством устройства 101 обнаружения позиции, картографической информации, содержащейся в модуле 102 хранения картографической информации, информации относительно целевых объектов, обнаруженных посредством модуля 103 датчиков, и величины ΔP перемещения рассматриваемого транспортного средства, оцененной с использованием функции оценки величины перемещения. Траектория движения включает в себя, по меньшей мере, позиции проезда и скорости рассматриваемого транспортного средства. В одном или более вариантов осуществления настоящего изобретения, траектория движения дополнительно включает в себя ориентации рассматриваемого транспортного средства. Затем функция выбора модели траектории движения контроллера 110 служит для того, чтобы считывать модель траектории движения, которая формируется с использованием функции формирования моделей траектории движения и соответствует траектории движения рассматриваемого транспортного средства, из одного или более типов моделей траектории движения, сохраненных в устройстве 105 хранения. Здесь, примеры способа считывания модели траектории движения из устройства 105 хранения включают в себя способ вычисления внутренних произведений между вектором траектории движения, полученным посредством векторизации траектории движения в онлайновом режиме рассматриваемого транспортного средства, и главными составляющими векторами моделей траектории движения, сохраненными в устройстве 105 хранения, и считывания, из устройства 105 хранения модели траектории движения, которая имеет главный составляющий вектор, обеспечивающий наибольшее внутреннее произведение с моделью траектории движения.
[0034] Функция коррекции одометрических параметров контроллера 110 служит для того, чтобы вычислять ошибку между величиной ΔP перемещения, вычисленной при одометрическом измерении, и фактической величиной перемещения рассматриваемого транспортного средства на основе величины ΔP перемещения из предыдущего цикла обработки, вычисленной в онлайновом режиме с использованием функции оценки величины перемещения, и межузлового расстояния (длины отрезка) модели траектории движения, считываемой из устройства 105 хранения с использованием функции выбора модели траектории движения. Затем функция коррекции одометрических параметров контроллера 110 служит для того, чтобы корректировать один или более одометрических параметров, используемых при одометрическом измерении таким образом, что вычисленная ошибка уменьшается. Примеры способа коррекции одометрических параметров включают в себя регулирование усиления, которое должно суммироваться с величиной ΔP перемещения при одометрическом измерении. Здесь, функция коррекции одометрических параметров контроллера 110 может служить для того, чтобы вычислять величину бокового скольжения рассматриваемого транспортного средства во время поворота на основе угла скольжения, включенного в модель траектории движения во время поворота, и регулировать усиление при одометрическом измерении в ответ на вычисленную величину бокового скольжения.
[0035] Функция оценки собственной позиции контроллера 110 служит для того, чтобы оценивать собственную позицию рассматриваемого транспортного средства на основе величины ΔP перемещения рассматриваемого транспортного средства, оцененной в онлайновом режиме с использованием функции оценки величины перемещения, одометрических параметров, скорректированных с использованием функции коррекции одометрических параметров, и картографической информации, содержащейся в модуле 102 хранения картографической информации. Например, функция оценки собственной позиции контроллера 110 служит для того, чтобы корректировать величину ΔP перемещения посредством суммирования усиления, отрегулированного с использованием функции коррекции одометрических параметров, с величиной ΔP перемещения, оцененной с использованием функции оценки величины перемещения, и оценивать собственную позицию рассматриваемого транспортного средства на основе скорректированной величины ΔP перемещения и картографической информации.
[0036] Ниже описывается способ оценки собственной позиции рассматриваемого транспортного средства. Этот способ осуществляется посредством системы 200 оценки собственной позиции. Контроллер 110, проиллюстрированный на фиг. 1, имеет функцию оценки собственной позиции. Оценка собственной позиции согласно одному или более вариантов осуществления настоящего изобретения выполняется посредством способа (так называемого одометрического измерения) вычисления расстояния перемещения и направления перемещения рассматриваемого транспортного средства в соответствии с углами вращения и угловыми скоростями вращения правых и левых колес транспортного средства. В способе оценки собственной позиции посредством одометрического измерения, величина перемещения рассматриваемого транспортного средства оценивается из угловых скоростей вращения колес и угла движения по окружности и скорости движения по окружности рассматриваемого транспортного средства, которые получаются из разности между угловыми скоростями вращения правых и левых колес. Тем не менее, к сожалению, в зависимости от условий пути движения, таких как топография пути движения, к примеру, подъем или спуск, и материал поверхности дороги, ошибка возникает между оцененным значением величины перемещения рассматриваемого транспортного средства в соответствии с вращением колес и фактической величиной перемещения рассматриваемого транспортного средства. Если факторы, которые вызывают ошибку, проясняются, ошибка величины ΔP перемещения транспортного средства вследствие одометрического измерения может уменьшаться, но может быть затруднительным точно анализировать вышеуказанные факторы из условий пути движения. Также может быть возможным корректировать одометрические параметры на основе относительной позиции между целевым объектом вокруг пути движения и рассматриваемым транспортным средством, чтобы за счет этого уменьшать ошибку величины ΔP перемещения рассматриваемого транспортного средства вследствие одометрического измерения, но это не может выполняться в секции, в которой целевой объект не может обнаруживаться.
[0037] Чтобы преодолевать вышеизложенные проблемы, оценка собственной позиции транспортного средства с использованием одометрического измерения согласно одному или более вариантов осуществления настоящего изобретения включает в себя инструктирование рассматриваемому транспортному средству двигаться, чтобы собирать предыстории движения, когда помощь при вождении или автоматизированное или автономное вождение не выполняется (этот режим в дальнейшем называется "оффлайновым режимом"), сохранение собранных предысторий движения в устройстве 105 хранения, формирование модели траектории движения на основе предысторий движения, сохраненных в устройстве 105 хранения, и корректировку одометрических параметров на основе ошибки между сформированной моделью траектории движения и фактическим движением рассматриваемого транспортного средства.
[0038] Здесь, когда два или более типов предысторий движения, имеющих различные позиции проезда транспортного средства и/или скорости транспортного средства, существуют в одном и том же отрезке, если два или более типов предысторий движения сохраняются в устройстве 105 хранения без сортировки, могут возникать такие проблемы, что модель траектории движения не может точно формироваться, и/или что ошибка величины ΔP перемещения вследствие одометрического измерения не может точно вычисляться при оценке собственной позиции. Следовательно, в одном или более вариантов осуществления настоящего изобретения, когда предыстории движения собираются в оффлайновом режиме и сохраняются в устройстве 105 хранения, два или более типов предысторий движения, существующих в одном и том же отрезке, сохраняются в устройстве 105 хранения таким образом, что они сортируются для двух или более типов. В дополнение или альтернативно, в одном или более вариантов осуществления настоящего изобретения, когда модель траектории движения формируется в оффлайновом режиме, два или более типов моделей траектории движения, соответствующих двум или более типов предысторий движения, существующих в одном и том же отрезке, формируются. В дополнение или альтернативно, в одном или более вариантов осуществления настоящего изобретения, когда собственная позиция рассматриваемого транспортного средства оценивается в онлайновом режиме, модель траектории движения, соответствующая траектории движения для движения рассматриваемого транспортного средства, выбирается из числа двух или более типов моделей траектории движения, сохраненных в устройстве 105 хранения, и ошибка величины ΔP перемещения вследствие одометрического измерения вычисляется с использованием выбранной модели траектории движения.
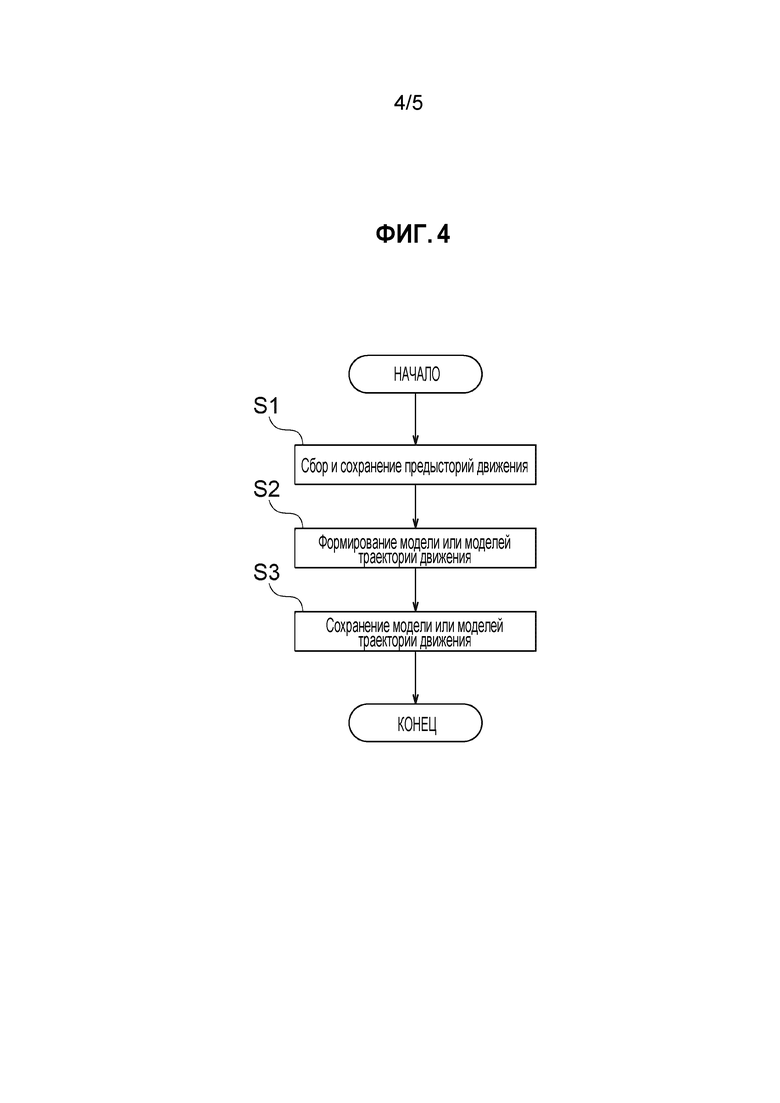
[0039] Сначала описывается способ формирования модели траектории движения в оффлайновом режиме согласно одному или более вариантов осуществления настоящего изобретения. Фиг. 4 является блок-схемой последовательности операций для описания способа формирования моделей траектории движения согласно одному или более вариантов осуществления настоящего изобретения. Как проиллюстрировано на блок-схеме последовательности операций способа, рассматриваемое транспортное средство задается с возможностью двигаться вдоль предварительно определенной секции в оффлайновом режиме, и предыстории движения собираются и сохраняются в устройстве 105 хранения (этап 1). Предыстории движения, собранные из рассматриваемого транспортного средства и сохраненные в устройстве 105 хранения, включают в себя величину ΔP перемещения рассматриваемого транспортного средства, оцененную с использованием функции оценки величины перемещения контроллера 110, скорость вращения колес, угол поворота при рулении и угловую скорость относительно вертикальной оси, выводимые из устройства 104 обнаружения состояния движения, информацию целевых объектов, выводимую из модуля 103 датчиков, и позицию рассматриваемого транспортного средства, обнаруженную посредством устройства 101 обнаружения позиции. Вышеуказанная предварительно определенная секция задается, например, любой из секции от NODE1 до NODE3 и секции от NODE1 до NODE4, как проиллюстрировано на фиг. 2, или секции от NODE1 до NODE3, как проиллюстрировано на фиг. 3. Число раз сбора предысторий движения в предварительно определенной секции и сохранения предысторий движения в устройстве 105 хранения составляет, по меньшей мере, один, но предыстории движения могут собираться и сохраняться два или более раз, чтобы повышать точность модели траектории движения, которая должна формироваться на этапе 2.
[0040] Здесь, когда один и тот же отрезок включает в себя два или более типов предысторий движения, имеющих различные позиции проезда и/или скорости, различные направления движения (к примеру, движение по прямой вперед и поворот направо) или различные позиции движения (к примеру, справа и в центре) из отрезка и т.п., функция определения предыстории движения контроллера 110 служит для того, чтобы определять два или более типов предысторий движения (см. фиг. 2 и 3). В этом случае, функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два или более типов предысторий данных таким образом, что они сортируются для соответствующих типов предысторий движения.
[0041] Затем модель траектории движения формируется из предысторий движения, сохраненных в устройстве 105 хранения (этап 2). Здесь, когда два или более типов предысторий движения в одном и том же отрезке сохраняются в устройстве 105 хранения, функция формирования моделей траектории движения контроллера 110 служит для того, чтобы формировать два или более типов моделей траектории движения для одного и того же отрезка. Формирование модели траектории движения или моделей может выполняться каждый раз, когда предыстория или предыстории движения собираются и сохраняются в устройстве 105 хранения, либо также может выполняться после сбора и записи двух или более предысторий движения.
[0042] Затем модель или модели траектории движения, сформированные на этапе 2, сохраняются в устройстве 105 хранения (этап 3). Здесь, когда два или более типов моделей траектории движения формируются для одного и того же отрезка, функция хранения предысторий движения контроллера 110 служит для того, чтобы управлять устройством 105 хранения таким образом, чтобы сохранять два или более типов моделей траектории данных таким образом, что они сортируются для соответствующих типов.
[0043] Далее описывается способ оценки собственной позиции в онлайновом режиме. Фиг. 5 является блок-схемой последовательности операций для описания способа оценки собственной позиции согласно одному или более вариантов осуществления настоящего изобретения. Как проиллюстрировано на блок-схеме последовательности операций способа, функция выбора модели траектории движения контроллера 110 служит для того, чтобы вычислять траекторию движения рассматриваемого транспортного средства на основе позиции рассматриваемого транспортного средства, обнаруженной посредством устройства 101 обнаружения позиции, картографической информации, содержащейся в модуле 102 хранения картографической информации, информации относительно целевых объектов, обнаруженных посредством модуля 103 датчиков, и величины ΔP перемещения рассматриваемого транспортного средства, оцененной с использованием функции оценки величины перемещения (этап 101).
[0044] Затем функция выбора модели траектории движения контроллера 110 служит для того, чтобы считывать модель траектории движения, соответствующую сформированной траектории движения рассматриваемого транспортного средства, из одной модели траектории движения или двух или более моделей траектории движения, сохраненных в устройстве 105 хранения (этап 102). Например, как проиллюстрировано на фиг. 2, когда рассматриваемое транспортное средство замедляется в LINK1 и/или проезжает через позицию справа на полосе 1 движения, чтобы поворачивать направо, функция выбора модели траектории движения контроллера 110 служит для того, чтобы считывать модель траектории движения, указываемую посредством сплошной (пунктирной) линии из устройства 105 хранения. Альтернативно, как проиллюстрировано на фиг. 3, когда рассматриваемое транспортное средство движется в позиции слева на пути 2 движения после поворота направо, функция выбора модели траектории движения контроллера 110 служит для того, чтобы выбирать модель траектории движения, указываемую посредством штрихпунктирной линии.
[0045] Затем функция коррекции одометрических параметров контроллера 110 служит для того, чтобы вычислять ошибку между величиной ΔP перемещения, вычисленной при одометрическом измерении, и величиной перемещения в модели траектории движения на основе величины ΔP перемещения из предыдущего цикла обработки, вычисленной с использованием функции оценки величины перемещения, и межузлового расстояния (длины отрезка) модели траектории движения, которое считывается из устройства 105 хранения с использованием функции выбора модели траектории движения (этап 103). Затем функция коррекции одометрических параметров контроллера 110 служит для того, чтобы вычислять усиление, которое должно суммироваться с величиной ΔP перемещения, вычисленной при одометрическом измерении (этап 104).
[0046] Затем функция оценки собственной позиции контроллера 110 служит для того, чтобы корректировать величину ΔP перемещения посредством суммирования усиления, отрегулированного с использованием функции коррекции одометрических параметров, с величиной ΔP перемещения, оцененной с использованием функции оценки величины перемещения (этап 105). Затем функция оценки собственной позиции контроллера 110 служит для того, чтобы оценивать собственную позицию рассматриваемого транспортного средства на основе величины ΔP перемещения, скорректированной на этапе 105, и картографической информации (этап 106).
[0047] Здесь, поясняется сравнительный пример. В сравнительном примере, предполагается, что один и тот же отрезок включает в себя два или более типов предысторий движения, имеющих различные позиции проезда транспортного средства, различные скорости транспортного средства и т.п., но, тем не менее, два или более типов предысторий движения сохраняются в устройстве 105 хранения без сортировки в оффлайновом режиме. В сравнительном примере, также предполагается, что модель траектории движения формируется посредством выполнения анализа главных компонентов в оффлайновом режиме для позиций проезда транспортного средства, скоростей транспортного средства и т.п., включенных в предыстории движения, сохраненные в устройстве 105 хранения. В настоящем сравнительном примере, дополнительно предполагается, что оценка собственной позиции движущегося транспортного средства выполняется в онлайновом режиме с использованием модели траектории движения, сформированной в оффлайновом режиме.
[0048] В сравнительном примере, модель траектории движения, сформированная в оффлайновом режиме, может не совпадать ни с одной из траекторий движения в LINK1 при повороте направо, которые указываются посредством пунктирных линий на фиг. 2, и также может не совпадать ни с одной из траекторий движения в LINK1 при движении по прямой вперед, которые указываются посредством сплошных линий. Соответственно, когда оценка собственной позиции движущегося транспортного средства выполняется в онлайновом режиме с использованием модели траектории движения, сформированной в оффлайновом режиме, отклонение может возникать между траекторией движения движущегося транспортного средства и моделью траектории движения как в случае поворота направо вдоль траектории движения, указываемой посредством пунктирной линии на чертеже, так и в случае движения по прямой вперед вдоль траектории движения, указываемой посредством сплошной линии на чертеже. Таким образом, ошибка между величиной ΔP перемещения, вычисленной при одометрическом измерении, и фактической величиной перемещения транспортного средства не может точно вычисляться, так что точность оценки собственной позиции движущегося транспортного средства ухудшается.
[0049] Напротив, в способе сохранения предысторий движения и системе 100 хранения предысторий движения согласно одному или более вариантов осуществления настоящего изобретения, выполняется определение в отношении того, что одна или более предысторий движения в одном и том же отрезке представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения, такого как позиция проезда транспортного средства, и два или более типов предысторий движения в одном и том же отрезке сохраняются в устройстве 105 хранения таким образом, что они сортируются для определенных двух или более типов. За счет этого можно формировать два или более типов моделей траектории движения, соответствующих двум или более типов предысторий движения, существующих в одном и том же отрезке, и/или выполнять оценку собственной позиции движущегося транспортного средства с использованием двух или более типов предысторий движения, существующих в одном и том же отрезке. В силу этого можно формировать модели траектории движения в соответствии с фактическими траекториями движения транспортного средства и повышать точность оценки собственной позиции движущегося транспортного средства.
[0050] В способе сохранения предысторий движения и системе 100 хранения предысторий движения согласно одному или более вариантов осуществления настоящего изобретения, выполняется определение в отношении того, что предыстории движения в идентичной LINK1 представляют собой два или более типов предысторий движения с условием определения относительно направлений движения транспортного средства из LINK1 (к примеру, то следует, например, двигаться по прямой вперед или поворачивать направо), когда путь движения разветвляется перед LINK1, как проиллюстрировано на фиг. 2, и два или более типов предысторий движения в идентичной LINK1 сохраняются в устройстве 105 хранения таким образом, что они сортируются для определенных направлений движения. Через эту операцию, модель траектории движения в LINK1 при повороте направо из LINK1 и модель траектории движения в LINK1 при движении по прямой вперед из LINK1 могут формироваться таким образом, что они являются отличимыми. Кроме того, когда движущееся транспортного средства поворачивает направо из LINK1, оценка собственной позиции может выполняться с использованием модели траектории движения в LINK1 в случае поворота направо, в то время как, когда движущееся транспортное средство движется прямо вперед из LINK1, оценка собственной позиции может выполняться с использованием модели траектории движения в LINK1 в случае движения по прямой вперед.
[0051] В способе сохранения предысторий движения и системе 100 хранения предысторий движения согласно одному или более вариантов осуществления настоящего изобретения, когда две или более позиций движения транспортного средства в одной полосе движения 2 (LINK2) перед LINK1 существуют, как проиллюстрировано на фиг. 3, к примеру, позиция движения справа, позиция движения около центра и позиция движения слева, выполняется определение в отношении того, что предыстории движения в идентичной LINK1 представляют собой два или более типов предысторий движения, и также выполняется определение в отношении того, что предыстории движения в идентичной LINK2 представляют собой два или более типов предысторий движения с условием определения относительно двух или более позиций движения транспортного средства в одной полосе движения 2. Затем в способе сохранения предысторий движения согласно одному или более вариантов осуществления настоящего изобретения, два или более типов предысторий движения в идентичной LINK1 сохраняются в устройстве 105 хранения таким образом, что они сортируются для определенных позиций движения, и два или более типов предысторий движения в идентичной LINK2 также сохраняются в устройстве 105 хранения таким образом, что они сортируются для определенных позиций движения. Через эту операцию, модели траектории движения в LINK1 и LINK2 при движении из LINK1 вправо на полосе 2 движения, модели траектории движения в LINK1 и LINK2 при движении из LINK1 приблизительно в центр полосы 2 движения и модели траектории движения в LINK1 и LINK2 при движении из LINK1 влево на полосе 2 движения могут формироваться таким образом, что они являются отличимыми. Кроме того, когда движущееся транспортное средство движется из LINK1 вправо на полосе 2 движения, оценка собственной позиции может выполняться с использованием моделей траектории движения в LINK1 и LINK2 в случае движения направо, когда движущееся транспортное средство движется из LINK1 приблизительно в центр полосы 2 движения, оценка собственной позиции может выполняться с использованием моделей траектории движения в LINK1 и LINK2 в случае движения приблизительно в центр, и когда движущееся транспортное средство движется из LINK1 влево на полосе 2 движения, оценка собственной позиции может выполняться с использованием моделей траектории движения в LINK1 и LINK2 в случае движения налево.
[0052] В способе сохранения предысторий движения и системе 100 хранения предысторий движения согласно одному или более вариантов осуществления настоящего изобретения, выполняется определение в отношении того, что предыстории движения в одном и том же отрезке представляют собой два или более типов предысторий движения с условием определения относительно позиций проезда транспортного средства в одном и том же отрезке и скоростей транспортного средства в одном и том же отрезке, и два или более типов предысторий движения в идентичной LINK1 сохраняются в устройстве 105 хранения таким образом, что они сортируются для определенных направлений движения. Через эту операцию, два или более типов траекторий движения, имеющих различные позиции проезда транспортного средства и различные скорости транспортного средства, могут моделироваться таким образом, что они являются отличимыми. Кроме того, когда движущееся транспортное средство проезжает через данный отрезок в данной позиции проезда и на данной скорости транспортного средства, оценка собственной позиции может выполняться с использованием модели траектории движения, имеющей данную позицию проезда и данную скорость транспортного средства.
[0053] Способ формирования модели траектории движения согласно одному или более вариантов осуществления настоящего изобретения включает в себя определение того, что одна или более предысторий движения в одном и том же отрезке представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения, сохранение двух или более типов предысторий движения в одном и том же отрезке в устройстве 105 хранения таким образом, что они сортируются для определенных двух или более типов, и формирование двух или более типов моделей траектории движения, соответствующих двум или более типов предысторий движения в одном и том же отрезке, сохраненных в устройстве 105 хранения. Это обеспечивает возможность формирования моделей траектории движения в соответствии с фактическими траекториями движения транспортного средства.
[0054] Способ оценки собственной позиции транспортного средства согласно одному или более вариантов осуществления настоящего изобретения включает в себя формирование двух или более типов моделей траектории движения с использованием вышеописанного способа формирования модели траектории движения согласно одному или более вариантов осуществления настоящего изобретения, сохранение сформированных двух или более типов моделей траектории движения в устройстве 105 хранения, выбор модели траектории движения, соответствующей траектории движения движущегося транспортного средства, из числа двух или более типов моделей траектории движения, сохраненных в устройстве 105 хранения, и корректировку ошибки величины перемещения транспортного средства вследствие одометрического измерения с использованием выбранной модели траектории движения. Через эту операцию, как проиллюстрировано на фиг. 2, например, при повороте направо из LINK1, ошибка величины перемещения транспортного средства вследствие одометрического измерения может корректироваться с использованием модели траектории движения, в которой траектория движения транспортного средства, поворачивающего направо, моделируется, и при движении по прямой вперед из LINK1, ошибка величины перемещения транспортного средства вследствие одометрического измерения может корректироваться с использованием модели траектории движения, в которой траектория движения транспортного средства, движущегося по прямой вперед, моделируется. В силу этого можно оценивать собственную позицию движущегося транспортного средства с использованием модели траектории движения в соответствии с фактической траекторией движения транспортного средства. Точность при оценке собственной позиции движущегося транспортного средства в силу этого может повышаться.
[0055] Варианты осуществления, поясненные выше, описываются для того, чтобы упрощать понимание настоящего изобретения, а не для того, чтобы ограничивать настоящее изобретение. Следовательно, подразумевается, что элементы, раскрытые в вышеописанных вариантах осуществления, включают в себя все конструктивные модификации и эквиваленты, которые попадают в пределы объема настоящего изобретения.
[0056] Например, в вышеописанных вариантах осуществления, предыстории движения собираются и сохраняются в устройстве 105 хранения, и модель траектории движения формируется и сохраняется в устройстве 105 хранения в оффлайновом режиме, и затем оценка собственной позиции движущегося транспортного средства выполняется в онлайновом режиме с использованием модели траектории движения. В альтернативном варианте осуществления, предыстории движения могут собираться и сохраняться в устройстве 105 хранения также в онлайновом режиме, и модель траектории движения может корректироваться.
Описание номеров ссылок
[0057] 100 - система хранения предысторий движения
105 - устройство хранения
110 - контроллер
200 - система оценки собственной позиции
Настоящее изобретение относится к способу сохранения предыстории движения, к способу формирования модели траектории движения, к способу оценки собственной позиции и к оборудованию для сохранения предыстории движения. Предусмотрен способ сохранения предыстории движения с использованием контроллера, чтобы сохранять предысторию движения транспортного средства в устройстве хранения для каждого отрезка пути движения. Способ включает в себя определение того, что одна или более предысторий движения в отрезке представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения, и сохранение двух или более типов предысторий движения в отрезке в устройстве хранения таким образом, что они сортируются для упомянутых определенных двух или более типов. Технический результат – повышение точности процесса движения транспортного средства с использованием предысторий движения транспортного средства, сохраненных в устройстве хранения. 6 н. и 1 з.п. ф-лы, 5 ил.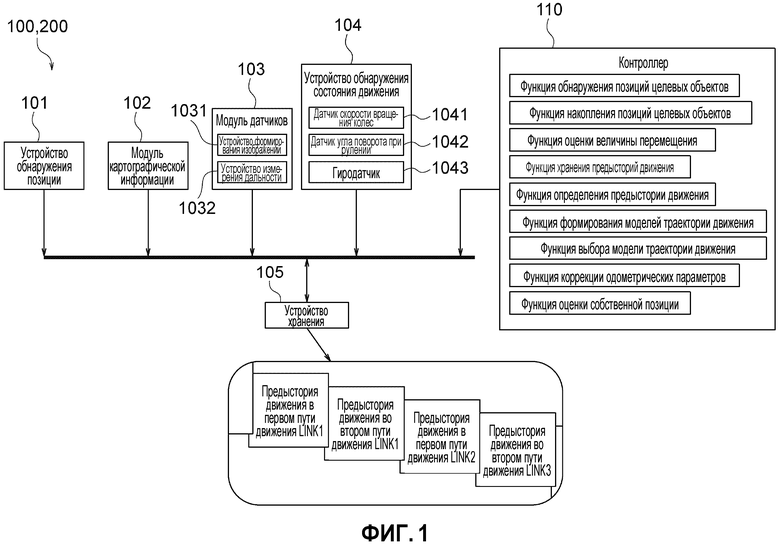
1. Способ сохранения предыстории движения с использованием контроллера, чтобы сохранять предысторию движения транспортного средства в устройстве хранения для каждого отрезка, соединяющего узлы, в информации дороги, при этом способ содержит этапы, на которых:
- когда направления движения транспортного средства разветвляются в точке разветвления, определяют то, что одна или более предысторий движения в отрезке на вышележащей стороне от точки разветвления представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения; и
- сохраняют два или более типов предысторий движения в отрезке в устройстве хранения таким образом, что они сортируются для упомянутых определенных двух или более типов,
при этом, когда путь движения впереди от отрезка разветвляется, предварительно определенное условие определения включает в себя направления движения транспортного средства впереди от точки разветвления.
2. Способ сохранения предыстории движения с использованием контроллера, чтобы сохранять предысторию движения транспортного средства в устройстве хранения для каждого отрезка, соединяющего узлы, в информации дороги, при этом способ содержит этапы, на которых:
- когда две или более позиций движения транспортного средства существуют в полосе движения впереди от точки разветвления, определяют то, что одна или более предысторий движения в отрезке на вышележащей стороне от точки разветвления и в отрезке впереди от точки разветвления представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения; и
- сохраняют два или более типов предысторий движения в отрезке в устройстве хранения таким образом, что они сортируются для упомянутых определенных двух или более типов,
при этом предварительно определенное условие определения включает в себя позиции движения в полосе движения.
3. Способ сохранения предыстории движения по п. 1 или 2, в котором предварительно определенное условие определения включает в себя по меньшей мере одно из позиции проезда транспортного средства в отрезке и скорости транспортного средства в отрезке.
4. Способ формирования модели траектории движения с использованием способа сохранения предыстории движения по п. 1 или 2, чтобы формировать, на основе предыстории движения, сохраненной в устройстве хранения, модель траектории движения, в которой моделируется траектория движения, включающая в себя по меньшей мере позицию проезда транспортного средства и скорость транспортного средства,
причем способ формирования модели траектории движения содержит этап, на котором:
- формируют два или более типов моделей траектории движения, соответствующих двум или более типам предысторий движения в отрезке, сохраненным в устройстве хранения.
5. Способ оценки собственной позиции с использованием контроллера, чтобы сохранять предысторию движения транспортного средства в устройстве хранения для каждого отрезка пути движения, формировать на основе предыстории движения, сохраненной в устройстве хранения, модель траектории движения, в которой моделируется траектория движения, включающая в себя по меньшей мере позицию проезда транспортного средства и скорость транспортного средства, и корректировать ошибку величины перемещения транспортного средства вследствие одометрического измерения с использованием сформированной модели траектории движения,
причем способ содержит этапы, на которых:
- определяют то, что одна или более предысторий движения в отрезке представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения;
- сохраняют два или более типов предысторий движения в отрезке в устройстве хранения таким образом, что они сортируются для упомянутых определенных двух или более типов;
- формируют два или более типов моделей траектории движения, соответствующих двум или более типам предысторий движения в отрезке, сохраненным в устройстве хранения;
- сохраняют сформированные два или более типов моделей траектории движения в устройстве хранения;
- выбирают модель траектории движения, соответствующую траектории движения движущегося транспортного средства, из числа двух или более типов моделей траектории движения, сохраненных в устройстве хранения, причем траектория движения включает в себя по меньшей мере позицию проезда транспортного средства и скорость транспортного средства; и
- корректируют ошибку величины перемещения транспортного средства вследствие одометрического измерения с использованием выбранной модели траектории движения.
6. Оборудование для сохранения предыстории движения, содержащее:
- устройство хранения; и
- контроллер, выполненный с возможностью сохранять предысторию движения транспортного средства в устройстве хранения для каждого отрезка, соединяющего узлы, в информации дороги,
причем контроллер дополнительно выполнен с возможностью:
- когда направления движения транспортного средства разветвляются в точке разветвления, определять то, что одна или более предысторий движения в отрезке на вышележащей стороне от точки разветвления представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения; и
- сохранять два или более типов предысторий движения в отрезке в устройстве хранения таким образом, что они сортируются для упомянутых определенных двух или более типов,
при этом, когда путь движения впереди от отрезка разветвляется, предварительно определенное условие определения включает в себя направления движения транспортного средства впереди от точки разветвления.
7. Оборудование для сохранения предыстории движения, содержащее:
- устройство хранения; и
- контроллер, выполненный с возможностью сохранять предысторию движения транспортного средства в устройстве хранения для каждого отрезка, соединяющего узлы, в информации дороги,
причем контроллер дополнительно выполнен с возможностью:
- когда две или более позиций движения транспортного средства существуют в полосе движения впереди от точки разветвления, определять то, что одна или более предысторий движения в отрезке на вышележащей стороне от точки разветвления и в отрезке впереди от точки разветвления представляют собой один тип или два или более типов предысторий движения, на основе предварительно определенного условия определения; и
- сохранять два или более типов предысторий движения в отрезке в устройстве хранения таким образом, что они сортируются для упомянутых определенных двух или более типов,
при этом предварительно определенное условие определения включает в себя позиции движения в полосе движения.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US 9499197 B2, 22.11.2016 | |||
| US 8352112 B2, 08.01.2013 | |||
| US 8473197 B2, 25.06.2013 | |||
| 0 |
|
SU153473A1 | |

