Область техники
[0001] Настоящее изобретение относится к способу помощи при движении и устройству помощи при движении для обеспечения помощи при движении транспортного средства.
Уровень техники
[0002] Обычно, в качестве устройства помощи при вождении для управления обгоном известно следующее устройство помощи при вождении (см., например, Патентный Документ 1). Когда рассматриваемое транспортное средство A меняет полосу движения, чтобы обогнать движущееся впереди транспортное средство B, блок 11 управления системой помощи при вождении проверяет, было ли обнаружено транспортное средство в заторе перед движущимся впереди транспортным средством B, и, если оно обнаружено, устанавливает оценочное значение затора на основе взаимосвязи между рассматриваемым транспортным средством A и движущимся впереди транспортным средством B и транспортным средством в заторе. Блок 11 управления системой помощи при вождении сравнивает оценочное значение затора с порогом оценки и определяет, что полоса движения перегружена, когда оценочное значение затора превышает пороговое оценочное значение. Когда определяется, что полоса перегружена, блок 11 управления системой помощи при вождении проверяет, обеспечено ли необходимое расстояние, позволяющее рассматриваемому транспортному средству A въехать перед движущимся впереди транспортным средством B, и, когда необходимое расстояние не обеспечено, выполняет управление замедлением при возвращении в полосу движения для возврата рассматриваемого транспортного средства A назад по отношению к движущемуся впереди транспортному средству B после того, как управление обгоном прерывается.
Документ предшествующего уровня техники
[0003] JP 2016-016829 A
Задача, решаемая изобретением
[0004] Однако в предшествующем уровне техники, поскольку обгон выполняется независимо от времени, которое может быть сокращено за счет обгона, существует вероятность того, что выполняется ненужный обгон.
[0005] Задача, решаемая с помощью настоящего изобретения, состоит в том, чтобы создать способ помощи при движении и устройство помощи при движении, которые могут предотвратить выполнение ненужного обгона.
Средства решения задачи
[0006] Настоящее изобретение решает вышеупомянутую задачу посредством идентификации движущегося впереди транспортного средства, которое движется впереди рассматриваемого транспортного средства в полосе движения, на основе информации обнаружения датчика; вычисления на основе информации обнаружения первого оценочного значения, указывающего вероятность того, что рассматриваемое транспортное средство может вернуться в полосу движения из соседней полосы движения, смежной с полосой движения, после обгона движущегося впереди транспортного средства; вычисления продолжительности сокращения времени движения, сокращенного за счет обгона движущегося впереди транспортного средства, на основе скорости рассматриваемого транспортного средства и скорости движущегося впереди транспортного средства; и определения того, обогнать или нет движущееся впереди транспортное средство, на основе первого оценочного значения и продолжительности сокращения.
Эффект изобретения
[0007] Согласно настоящему изобретению можно предотвратить выполнение ненужного обгона.
Краткое описание чертежей
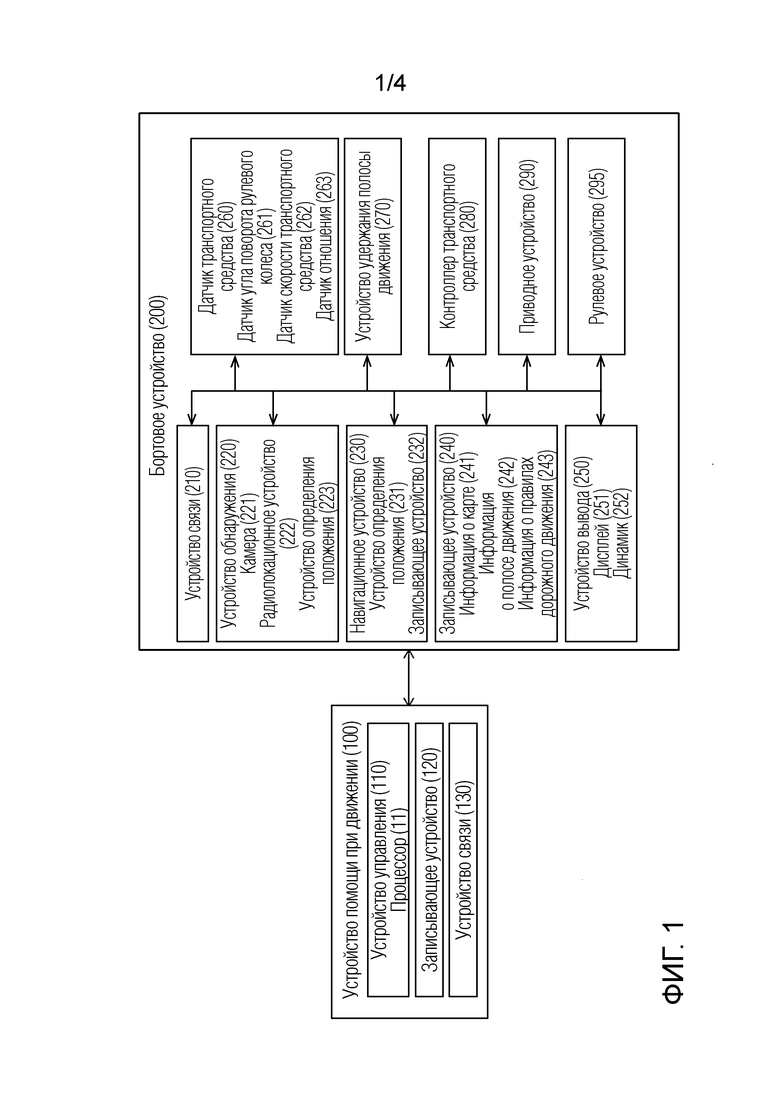
[0008] Фиг. 1 - блок-схема системы управления движением, включающей в себя устройство помощи при движении согласно настоящему варианту осуществления;
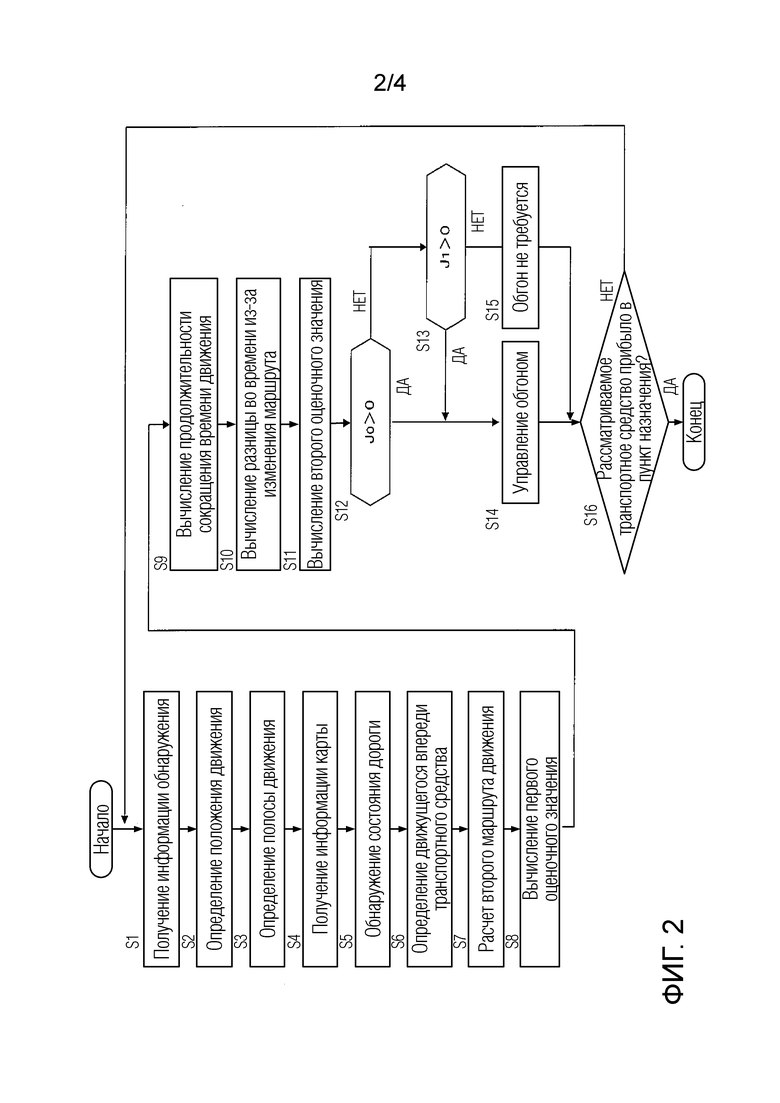
Фиг. 2 - блок-схема, показывающая процедуру управления системой управления движением настоящего варианта осуществления;
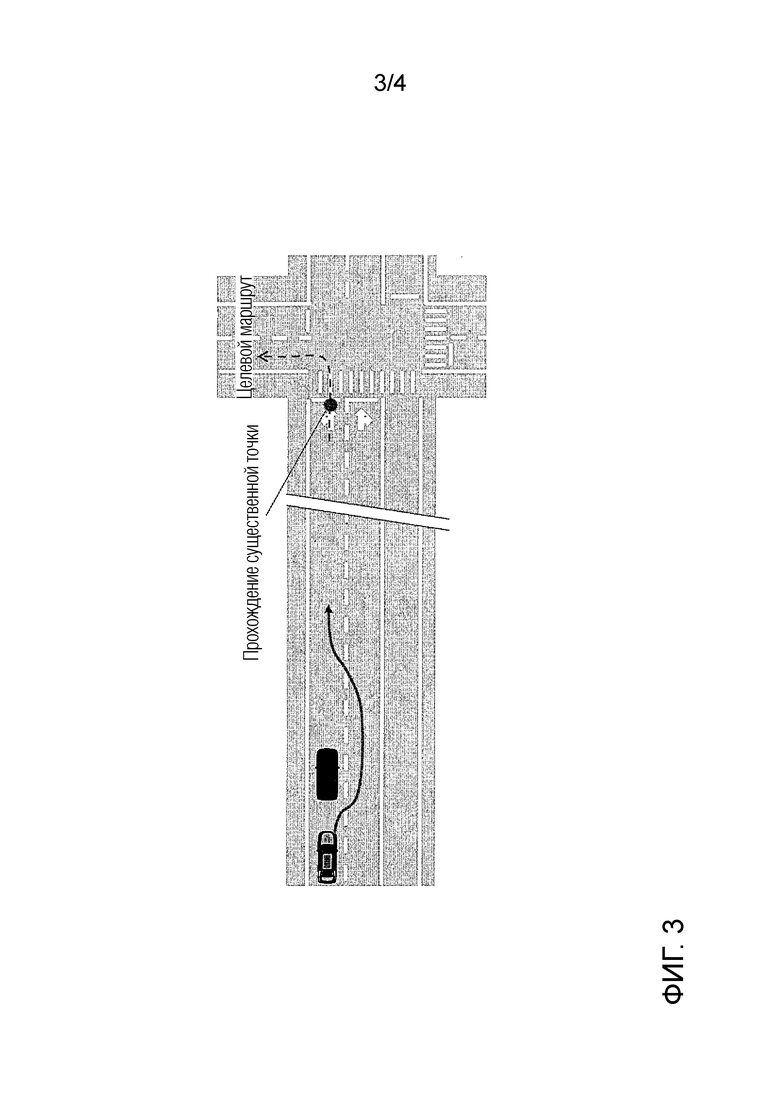
Фиг. 3 - схема, поясняющая случай, при котором транспортное средство обгоняет движущееся впереди транспортное средство; и
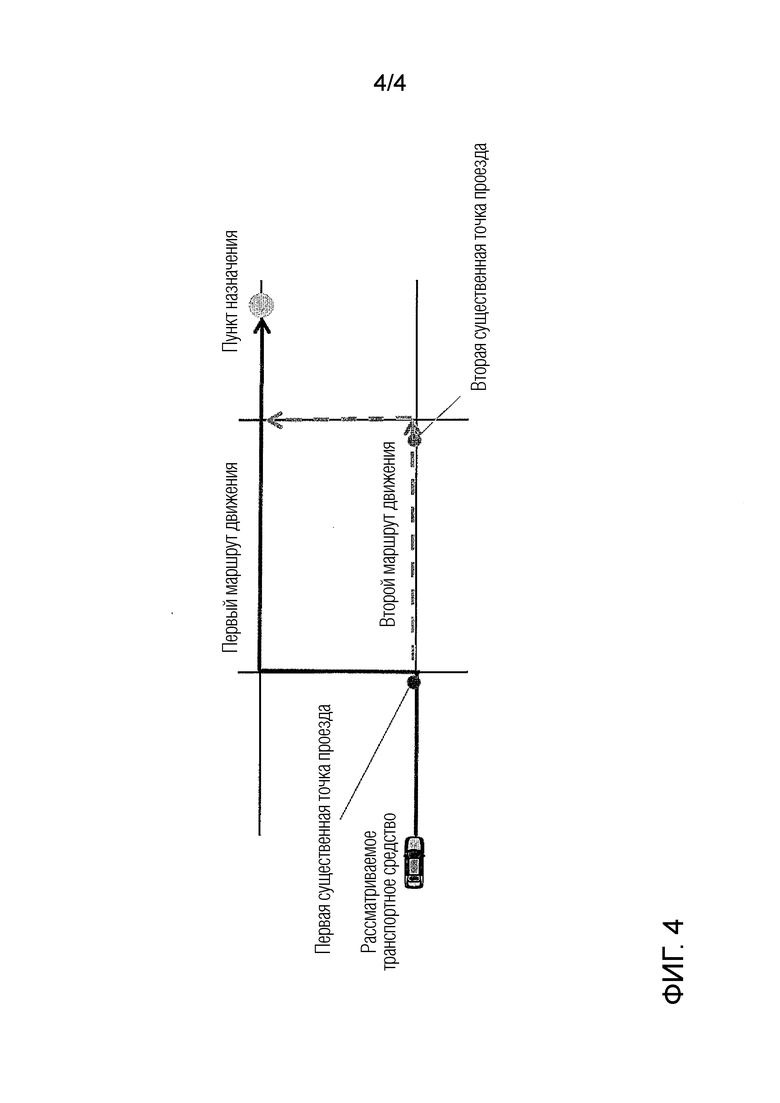
Фиг. 4 - схема для пояснения маршрута движения, установленного для рассматриваемого транспортного средства, чтобы прибыть в пункт назначения.
Вариант(ы) осуществления изобретения
[0009] В дальнейшем, один или более вариантов осуществления настоящего изобретения будут описаны со ссылкой на чертежи. В одном или более вариантах осуществления настоящего изобретения будет описан пример, в котором настоящее изобретение применяется к системе управления движением, включающей в себя устройство помощи при движении для обеспечения помощи движению транспортного средства согласно настоящему изобретению.
[0010] Фиг. 1 представляет собой схему, показывающую блочную конфигурацию системы 1 управления движением. Система 1 управления движением согласно одному или более вариантам осуществления настоящего изобретения включает в себя устройство 100 помощи при движении и бортовое устройство 200.
Устройство 100 помощи при движении может быть сконфигурировано как аппаратное обеспечение, интегрированное с бортовым устройством 200, или может быть сконфигурировано для распространения как устройство, отдельное от бортового устройства 200.
В этом примере система управления движением будет описана как пример, в котором устройство 100 помощи при движении сконфигурировано для обмена информацией и взаимодействия с бортовым устройством 200, установленным в транспортном средстве, через устройство 130 связи. Система управления движением выполняет автоматическое вождение, которое не требует каких-либо действий со стороны водителя, или выполняет автоматическое вождение, которое требует некоторых действий со стороны водителя. Управление транспортным средством системой управления движением осуществляется в соответствии с правилами дорожного движения каждой страны.
[0011] Далее будет описано устройство помощи при движении. Устройство 100 помощи при движении включает в себя устройство 110 управления, записывающее устройство 120 и устройство 130 связи. Устройство 110 управления включает в себя процессор 111, который выполняет процесс управления для помощи движению рассматриваемого транспортного средства, например, обгона движущегося впереди транспортного средства. Процессор 111 представляет собой устройство обработки информации, имеющее функцию обработки информации для выполнения процесса управления, необходимого для содействия движению рассматриваемого транспортного средства. Процессор 111 является компьютером, включающим в себя ПЗУ (постоянное запоминающее устройство), в котором хранится программа для определения того, обогнать ли движущееся впереди транспортное средство, и выполнения процесса управления помощью при движении на основе результата определения, ЦП (центральный процессор) в качестве рабочей схемы, функционирующей как устройство 110 управления путем выполнения программы, хранящейся в ПЗУ, и ОЗУ (оперативное запоминающее устройство), функционирующее как доступное записывающее устройство. Устройство 110 управления согласно одному или более вариантам осуществления настоящего изобретения выполняет каждую функцию посредством взаимодействия программного обеспечения для реализации вышеупомянутых функций и вышеописанного оборудования. Устройство 110 управления и записывающее устройство 120 могут обмениваться информацией друг с другом через проводную или беспроводную линию связи. Устройство 130 связи может обмениваться информацией с бортовым устройством 200.
[0012] Записывающее устройство 120 хранит данные карты, необходимые для обработки расчета маршрута движения рассматриваемого транспортного средства и/или обработки управления движением рассматриваемого транспортного средства. Устройство 130 связи отправляет сигналы на устройство 210 связи, включенное в бортовое устройство 200, и принимает сигналы от него. Устройство 100 помощи при движении получает информацию, обрабатываемую бортовым устройством 200, и информацию, хранящуюся в бортовом устройстве 200, с помощью устройства 130 связи.
[0013] Теперь будет описано бортовое устройство 200.
Бортовое устройство 200 получает информацию обнаружения о рассматриваемом транспортном средстве и ситуации вокруг рассматриваемого транспортного средства и приводит в движение рассматриваемое транспортное средство на основе команды от устройства 100 помощи при движении.
Бортовое устройство 200 согласно одному или более вариантам осуществления настоящего изобретения включает в себя устройство 210 связи, устройство 220 обнаружения, навигационное устройство 230, записывающее устройство 240, выходное устройство 250, датчик 260 транспортного средства, устройство 270 удержания полосы движения, контроллер 280 транспортного средства, приводное устройство 290 и рулевое устройство 295.
[0014] Устройство 210 связи согласно одному или более вариантам осуществления настоящего изобретения осуществляет связь с каждым устройством бортового устройства 200 и внешнего сервера 300. Устройства, составляющие бортовое устройство 200, соединены друг с другом посредством CAN (сеть контроллеров) или другой бортовой LAN (коммуникационное устройство 210) для обмена информацией друг с другом. Бортовое устройство 200 может обмениваться информацией с устройством 100 помощи при движении через бортовую LAN 210. Бортовое устройство 200 может обмениваться информацией с внешним сервером через устройство 210 связи, которое выполняет беспроводную связь.
[0015] Устройство 220 обнаружения получает информацию обнаружения об окрестностях рассматриваемого транспортного средства, движущегося по маршруту. Устройство 220 обнаружения транспортного средства распознает наличие и местоположение полосы движения, по которой движется транспортное средство, и обнаруживает присутствие и положение объекта, включая препятствие, существующее вокруг рассматриваемого транспортного средства. Устройство 220 обнаружения обнаруживает состояние дороги полосы движения, по которой движется рассматриваемое транспортное средство, и состояние дороги соседней полосы движения, смежной с полосой движения. Состояние дороги представляет собой структуру дороги, положение движущегося транспортного средства, скорость движущегося транспортного средства и тому подобное. В нижеследующем описании, без каких-либо ограничений, устройство 220 обнаружения включает в себя камеру 221. Камера 221 представляет собой устройство формирования изображения, включающее, например, датчик изображения, такой как ПЗС-матрица. Камера 221 может быть инфракрасной камерой или стереокамерой. Камера 221 устанавливается в заранее определенном положении транспортного средства и фиксирует маркер полосы движения транспортного средства и объект вокруг транспортного средства. Периферия транспортного средства включает переднюю сторону, заднюю сторону, переднюю боковую сторону и заднюю боковую сторону транспортного средства. К объектам относятся двумерные знаки, такие как полосы движения, стоп-линии и т.д., нанесенные на поверхность дороги. Объекты могут быть и трехмерными объектами. К объектам относятся стационарные объекты, например, знаки. К объектам относятся движущиеся объекты, такие как пешеходы, мотоциклы и автомобили (другие транспортные средства). Объекты включают дорожные конструкции, в том числе срединную полосу, например, ограждения и бордюры, сигнальные средства, знаки и устройства отображения.
[0016] Устройство 220 обнаружения согласно одному или более вариантам осуществления настоящего изобретения анализирует данные изображения и распознает наличие и положение полосы движения, по которой движется рассматриваемое транспортное средство, и соседнюю полосу движения рядом с полосой движения на основе результата анализа. Кроме того, устройство 220 обнаружения распознает присутствие и положение транспортных средств, движущихся по полосе движения, и транспортных средств, движущихся по соседней полосе рядом с полосой движения. Устройство 220 обнаружения распознает наличие или отсутствие, положение и тип разметки полосы движения и/или соседней полосы. Устройство 220 обнаружения распознает присутствие, положение и тип объекта. В нижеследующем описании полоса движения указывает полосу движения, по которой движется рассматриваемое транспортное средство, а соседняя полоса является полосой, смежной с полосой движения.
[0017] Устройство 220 обнаружения содержит радарное устройство 222. В качестве радарного устройства 222 может использоваться такая система, как радар миллиметрового диапазона, лазерный радар, ультразвуковой радар, лазерный дальномер или тому подобное, известное на момент применения. Устройство 220 обнаружения определяет присутствие или отсутствие объекта, положение объекта и расстояние до объекта на основе принятого сигнала радарного устройства 222. Устройство 220 обнаружения обнаруживает присутствие или отсутствие объекта, положение объекта и расстояние до объекта на основе результата кластеризации информации облака точек, полученной лазерным радаром.
[0018] Дополнительно, если устройство 210 связи может осуществлять межтранспортную связь между другим транспортным средством и рассматриваемым транспортным средством, устройство 220 обнаружения может получать информацию обнаружения от этого другого транспортного средства. Конечно, устройство 220 обнаружения может получать информацию посредством так называемой связи между транспортными средствами и дорожной информацией и может получать информацию о дороге, включая полосу движения и прилегающую полосу движения, как информацию обнаружения, например, от внешнего устройства интеллектуальных транспортных систем (ITS) через устройство связи 210. Устройство 220 обнаружения может получать информацию о близости к транспортному средству с помощью бортового устройства 220 обнаружения и может получать информацию об области, удаленной от транспортного средства на заданное расстояние или более от внешнего устройства, установленного на обочине дороги, через устройство связи 210.
[0019] Устройство 220 обнаружения может включать в себя устройство 223 определения положения. В этом примере получается результат обнаружения устройства 231 определения положения, включенного в навигационное устройство 230.
Устройство 220 обнаружения последовательно выводит результат обнаружения в процессор 11.
[0020] Навигационное устройство 230 вычисляет маршрут от текущего местоположения транспортного средства до пункта назначения, используя способ, известный на момент подачи заявки. Вычисленный маршрут передается в устройство 100 помощи при движении и/или контроллер 280 транспортного средства для использования при управлении движением транспортного средства. Вычисленный маршрут также выводится в качестве информации указаний в отношении маршрута через устройство 250 вывода, которое будет описано далее. Навигационное устройство 230 включает в себя устройство 231 определения положения. Устройство 231 определения местоположения содержит приемник глобальной системы позиционирования (GPS) и определяет положение в пути (значения широты, долготы и координат на карте) движущегося транспортного средства. Информация о текущем местоположении передается в процессор 11 как информация обнаружения.
[0021] Навигационное устройство 230 обращается к записывающему устройству 240 и обращается к информации 241 карты, информации 242 полосы движения и информации 243 правил дорожного движения. Навигационное устройство 230 указывает полосу движения, по которой движется транспортное средство, на основе текущего положения транспортного средства, обнаруженного устройством 231 определения положения. Полоса движения может быть частью маршрута к пункту назначения, заданному пользователем, или может быть частью маршрута к пункту назначения, оцененному на основе истории поездок транспортного средства/пользователя. Навигационное устройство 230 указывает полосу движения, по которой движется транспортное средство, со ссылкой на картографическую информацию 241 и т.п., что будет описано далее.
[0022] Устройство 250 вывода включает в себя дисплей 251 и динамик 252. Устройство 250 вывода выводит различные типы информации, относящейся к управлению движением, пользователю или пассажиру окружающего транспортного средства. Устройство 250 вывода выводит величину отклонения между полосой движения и полосой из картографической информации 241, содержимого модификации картографической информации, запланированного плана действий при вождении и информации об управлении движением на основе плана действий при вождении. Устройство 250 вывода может выводить различные типы информации, относящейся к управлению движением, на внешнее устройство, такое как интеллектуальная транспортная система, через устройство связи.
[0023] Датчик 260 транспортного средства включает в себя датчик 261 угла поворота рулевого колеса, датчик 262 скорости транспортного средства и датчик 263 положения. Датчик 261 угла поворота рулевого колеса обнаруживает информацию, такую как величина поворота, скорость поворота и ускорение поворота, и выводит информацию на контроллер 280 транспортного средства. Датчик 262 скорости транспортного средства определяет скорость и/или ускорение транспортного средства и выдает информацию о скорости и/или ускорении транспортного средства на контроллер 280 транспортного средства. Датчик 263 ориентации определяет положение транспортного средства, угол тангажа транспортного средства и угол крена транспортного средства, а также угол рыскания транспортного средства и выводит их на контроллер 280 транспортного средства. Датчик 263 ориентации включает в себя гироскопический датчик.
[0024] Устройство 270 удержания полосы движения обнаруживает полосу движения по снимаемому с камеры 221 изображению. Устройство 270 удержания полосы движения имеет функцию предотвращения съезда с полосы движения (функция поддержки удержания полосы движения) для управления движением транспортного средства, чтобы поддерживать заранее заданное соотношение между положением полосы движения полосы движения и положением транспортного средства. Устройство 100 помощи при движении управляет движением транспортного средства, так что транспортное средство движется по центру полосы движения. Знак полосы движения не ограничен до тех пор, пока знак полосы движения имеет функцию определения полосы движения и может быть схемой, нарисованной на поверхности дороги, может быть озеленением, существующим между полосами движения, или может быть структурой дороги, такой как ограждение, бордюрный камень, разделительная полоса, пешеходная или мотоциклетная дорога, проложенная на обочине полосы движения. Знак полосы движения может быть стационарным объектом, например, вывеской, знаком, магазином, уличным деревом и т.п., существующим на обочине полосы движения. Как будет описано далее, когда устройство 100 помощи при движении решает выполнить обгон движущегося впереди транспортного средства, устройство удержания полосы движения отменяет удержание полосы движения.
[0025] Контроллер 280 транспортного средства согласно одному или более вариантам осуществления настоящего изобретения выполняет управление движением транспортного средства согласно плану вождения, запланированному процессором 111. Контроллер 280 транспортного средства управляет датчиком 260 транспортного средства, приводным устройством 290 и устройством 295 рулевого управления. Контроллер 280 транспортного средства получает информацию о транспортном средстве от датчика 260 транспортного средства. Контроллер 280 транспортного средства согласно одному или более вариантам осуществления настоящего изобретения представляет собой бортовой компьютер, такой как электрический блок управления (ЭБУ), и электронным образом управляет движением/работой транспортного средства. Примеры транспортного средства включают в себя электромобиль, имеющий электродвигатель в качестве источника ходового привода, транспортное средство с двигателем, имеющее двигатель внутреннего сгорания в качестве источника ходового привода, и гибридное транспортное средство, имеющее как электродвигатель, так и двигатель внутреннего сгорания в качестве источника ходового привода. Примеры электромобиля или гибридного автомобиля, имеющего электродвигатель в качестве источника ходового привода, включают такие, в которых источником энергии для электродвигателя является вторичная батарея, и типа, в котором источником энергии для электродвигателя является топливная ячейка.
[0026] Приводное устройство 290 согласно одному или более вариантам осуществления настоящего изобретения включает в себя приводной механизм транспортного средства. Приводной механизм включает в себя электродвигатель и/или двигатель внутреннего сгорания в качестве вышеупомянутых источников ходового привода, устройство передачи мощности, включающее приводной вал и автоматическую трансмиссию для передачи выходной мощности от источников ходового привода на ведущие колеса, тормозное устройство 271 для торможения колес и т.п. Приводное устройство 290 генерирует соответствующие управляющие сигналы этих приводных механизмов на основе входных сигналов при работе акселератора и тормозов, а также управляющих сигналов, полученных от контроллера 280 транспортного средства, и выполняет управление движением, включая ускорение и замедление транспортного средства. Посредством отправки управляющей информации на приводное устройство 290 управление движением, включая ускорение и замедление транспортного средства, может выполняться автоматически. В случае гибридного автомобиля отношение крутящего момента на выходе электродвигателя и крутящего момента на выходе двигателя внутреннего сгорания в соответствии с состоянием движения транспортного средства также передается на приводное устройство 290.
[0027] Устройство 295 рулевого управления согласно одному или более вариантам осуществления настоящего изобретения включает в себя привод рулевого управления. Привод рулевого управления включает в себя двигатель или т.п., прикрепленный к валу рулевой колонки. Устройство 295 рулевого управления выполняет управление для изменения направления движения транспортного средства на основе управляющего сигнала, полученного от контроллера 280 транспортного средства, или входного сигнала посредством операции рулевого управления. Контроллер 280 транспортного средства передает информацию управления, включая величину рулевого управления, на устройство 295 рулевого управления, тем самым выполняя управление изменением направления движения. Управление приводным устройством 290 и управление устройством 295 рулевого управления может выполняться полностью автоматически или может выполняться таким образом, чтобы помогать водителю при вождении. Управление приводным устройством 290 и управление рулевым устройством 295 может быть прервано/остановлено вмешательством водителя.
[0028] Далее будет описана последовательность операций управления устройством 100 помощи при движении со ссылкой на Фиг. 2-4. Фиг. 2 представляет собой блок-схему, показывающую последовательность операций управления устройством 100 помощи при движении. Фиг. 3 представляет собой схему, поясняющую случай, при котором рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство. Фиг. 4 представляет собой схему для пояснения маршрута движения, установленного для рассматриваемого транспортного средства, чтобы прибыть в пункт назначения. Следует отметить, что на странице Фиг. 4, верхняя сторона является севером.
[0029] Устройство 100 помощи при движении определяет, выполнять ли обгон движущегося впереди транспортного средства в случае, при котором движущееся впереди транспортное средство движется впереди рассматриваемого транспортного средства, и выполняет обработку управления, описанную ниже, для выполнения управления обгоном на основе результат определения. Устройство 100 помощи при движении выполняет следующую последовательность управления в момент времени, когда, например, скорость транспортного средства движущегося впереди транспортного средства равна или ниже заданной скорости транспортного средства, и это состояние продолжается в течение заданного периода времени или дольше. В качестве альтернативы, устройство 100 помощи при движении выполняет следующий поток управления в момент времени, когда, например, рассматриваемое транспортное средство приближается к движущемуся впереди транспортному средству, и расстояние между рассматриваемым транспортным средством и движущимся впереди транспортным средством становится равным или меньшим заданного расстояния. При выполнении последовательности управления устройство 100 управления получает маршрут движения от текущего положения рассматриваемого транспортного средства до пункта назначения (в дальнейшем именуемого первым маршрутом движения) от навигационного устройства 230 и выполняет автоматическое управление движением, так что рассматриваемое транспортного средства движется по рассчитанному маршруту движения. Устройство 110 управления может выполнять следующую последовательность операций управления, когда автоматическое управление движением не выполняется.
[0030] На этапе S1 устройство 110 управления устройства 100 помощи при движении получает информацию обнаружения, обнаруженную устройством 220 обнаружения бортового устройства 200. Информация об обнаружении включает в себя, по меньшей мере, информацию о том, что происходит впереди транспортного средства. Например, информация обнаружения включает в себя информацию на расстоянии до нескольких сотен метров впереди рассматриваемого транспортного средства на полосе движения рассматриваемого транспортного средства. Когда рядом с полосой движения есть соседняя полоса движения, информация об обнаружении также включает информацию и о соседней полосе движения.
[0031] На этапе S2 устройство 110 управления определяет форму дороги (структуру дороги), по которой в настоящее время движется рассматриваемое транспортное средство, на основе информации обнаружения бортового устройства 200, и определяет положение, в котором рассматриваемое транспортное средство в настоящее время движется по указанной дороге. Устройство 110 управления может определять положение движения рассматриваемого транспортного средства, используя информацию обнаружения, обнаруженную устройством 223 определения положения или устройством 231 определения положения.
[0032] На этапе S3 устройство 110 управления указывает полосу движения, по которой в настоящее время движется рассматриваемое транспортное средство. Устройство 110 управления определяет количество полос и форму полос, по которым в настоящее время движется рассматриваемое транспортное средство, на основе информации обнаружения бортового устройства 200. Затем устройство 110 управления указывает, по какой полосе движения движется рассматриваемое транспортное средство из одной или нескольких полос, указанных с использованием положения движения рассматриваемого транспортного средства. В примере с Фиг. 3, устройство 110 управления определяет, что рассматриваемое транспортное средство движется по крайней левой полосе дороги с двумя полосами движения на каждой стороне. Устройство 110 управления может указывать полосу движения на основе информации о полосе движения, записанной в записывающем устройстве 240, и положения движения рассматриваемого транспортного средства.
[0033] На этапе S4 устройство 110 управления получает информацию 241 карты от записывающего устройства 240.
[0034] На этапе S5 устройство 110 управления обнаруживает состояние дороги впереди рассматриваемого транспортного средства. Устройство 110 управления определяет в качестве состояния дороги относительное положение другого транспортного средства относительно формы дороги, заданной в процессе управления на этапе S2. Другое транспортное средство представляет собой транспортное средство, которое движется или останавливается на полосе движения и/или соседней полосе.
[0035] Например, как показано на Фиг. 3, предполагается, что дорога с двумя полосами движения на каждой стороне в форме прямой линии соединена с перекрестком, и рассматриваемое транспортное средство движется примерно на 100 м до перекрестка. В это время устройство 100 управления определяет состояние дороги, включая зону от рассматриваемого транспортного средства до перекрестка перед рассматриваемым транспортным средством.
В примере с Фиг. 3 предполагается, что, когда светофор на перекрестке горит красным, а маршрут движения к месту назначения рассматриваемого транспортного средства является маршрутом, по которому рассматриваемое транспортное средство поворачивает налево на перекрестке, множество других транспортных средств останавливается в очереди на полоса для проезда, чтобы повернуть налево. В такой ситуации устройство 110 управления определяет, как состояние дороги, положения множества других транспортных средств, остановившихся в очереди на полосе движения, и, таким образом, может указывать положения множества других транспортных средств, остановленных в полосе в полосе движения, и расстояние от другого транспортного средства до остановки в конце линии до рассматриваемого транспортного средства. Кроме того, когда другое транспортное средство движется между другим транспортным средством, остановившимся в конце линии, и рассматриваемым транспортным средством, устройство 100 управления может указывать другое транспортное средство, движущееся из обнаруженных дорожных условий.
В другом примере с Фиг. 3 предполагается, что светофор на перекрестке является синим, другое транспортное средство останавливается на перекрестке для поворота направо, и множество транспортных средств останавливаются в очереди позади другого транспортного средства, ожидая поворота направо. В такой ситуации устройство 110 управления определяет в качестве дорожных условий положения множества других транспортных средств, остановившихся в очереди на соседней полосе движения, и, таким образом, может определять положения множества других транспортных средств, остановившихся в линию в соседней полосе движения, и расстояние от другого транспортного средства до остановки в конце линии до рассматриваемого транспортного средства. Кроме того, когда другое транспортное средство движется между другим транспортным средством, остановившимся в конце линии, и рассматриваемым транспортным средством, устройство 100 управления может указывать другое транспортное средство, движущееся из обнаруженных дорожных условий.
[0036] На этапе S6 устройство 110 управления идентифицирует движущееся впереди транспортное средство на основе дорожных условий. Движущееся впереди транспортное средство представляет собой транспортное средство, движущееся впереди рассматриваемого транспортного средства по полосе движения.
[0037] На этапе S7 устройство 110 управления использует навигационное устройство 230 для расчета второго маршрута движения на основе информации 241 карты. Второй маршрут движения является маршрутом, отличным от первого маршрута движения, и представляет собой маршрут, по которому рассматриваемое транспортное средство прибывает в пункт назначения, когда рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения к тому времени, когда рассматриваемое транспортное средство прибывает в заданный пункт назначения после обгона движущегося впереди транспортного средства. При вычислении второго маршрута движения устройство 110 управления устанавливает существенную точку проезда на втором маршруте движения.
[0038] Взаимосвязь между первым маршрутом движения и вторым маршрутом движения будет описана со ссылкой на Фиг. 4. В настоящее время рассматриваемое транспортное средство движется с запада на восток в сторону перекрестка, включая первую существенную точку проезда. Первый маршрут движения представляет собой маршрут, в котором рассматриваемое транспортное средство делает левый поворот с востока на север на перекрестке, включающем первую существенную точку проезда. Если рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает первую существенную точку проезда после обгона движущегося впереди транспортного средства, рассматриваемое транспортное средство движется прямо на перекрестке, включая первую существенную точку проезда. Затем, как показано на Фиг. 4, чтобы прибыть в пункт назначения, рассматриваемому транспортному средству необходимо повернуть налево на следующем перекрестке после движения прямо на перекрестке, включая первую существенную точку проезда. По этой причине устройство 110 управления вычисляет в качестве второго маршрута движения маршрут, по которому рассматриваемое транспортное средство движется прямо вперед на перекрестке, включающем первую существенную точку проезда, и поворачивает налево с востока на север на перекрестке, включая вторую существенную точку проезда. Кроме того, устройство 110 управления устанавливает вторую существенную точку проезда на перекрестке после того, как рассматриваемое транспортное средство проехало прямо на перекрестке, включая первую существенную точку проезда.
[0039] Например, в примере с Фиг. 3 существенная точка проезда установлена на перекрестке, а первый маршрут движения представляет собой маршрут, по которому рассматриваемое транспортное средство поворачивает налево на перекрестке. Существенная точка проезда представляет собой точку, в которой рассматриваемому транспортному средству необходимо проехать, чтобы проехать по маршруту следования к месту назначения данного транспортного средства. Когда существенная точка проезда установлена на перекрестке, второй маршрут движения является маршрутом, по которому рассматриваемое транспортное средство движется в направлении, отличном от первого маршрута движения на перекрестке, включая существенную точку проезда.
[0040] На этапе S8 устройство 110 управления вычисляет первое оценочное значение в качестве индекса для определения того, выполнять ли обгон движущегося впереди транспортного средства, на основе информации обнаружения бортового устройства 200. Первое оценочное значение указывает на риск того, что рассматриваемое транспортное средство не сможет вернуться с соседней полосы движения на полосу движения. Другими словами, первое оценочное значение указывает вероятность того, что рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения после обгона движущегося впереди транспортного средства. Чем больше первое оценочное значение, тем выше риск того, что рассматриваемое транспортное средство не сможет вернуться из соседней полосы движения на полосу движения после обгона движущегося впереди транспортного средства, и тем ниже вероятность того, что рассматриваемое транспортное средство может вернуться из соседней полосы на полосу движения. Чем меньше первое оценочное значение, тем ниже риск того, что рассматриваемое транспортное средство не сможет вернуться из соседней полосы движения на полосу движения после обгона движущегося впереди транспортного средства, и, следовательно, тем выше вероятность того, что рассматриваемое транспортное средство может вернуться из соседней полосы в полосу движения. Первое оценочное значение рассчитывается на основе времени прибытия от текущего местоположения рассматриваемого транспортного средства до целевой точки. Целевая точка является существенной точкой проезда на первом маршруте движения, существенной точкой проезда, общей для первого маршрута и второго маршрута, позиции, удаленной на заданное расстояние от существенной точки проезда на втором маршруте движения, или существенной точкой проезда на втором маршруте путешествия.
[0041] Устройство 110 управления вычисляет расстояние от текущего местоположения рассматриваемого транспортного средства до существенной точки проезда и вычисляет время прибытия до существенной точки проезда путем деления вычисленного расстояния на текущую скорость транспортного средства объекта. Чем дольше время прибытия в существенную точку проезда, тем дольше может быть обеспечено дополнительное время для возврата транспортного средства с полосы движения на соседнюю полосу. Может ли рассматриваемое транспортное средство вернуться с соседней полосы движения на полосу движения, зависит от состояния дороги на полосе движения после обгона движущегося впереди транспортного средства. Например, даже если время прибытия рассматриваемого транспортного средства в существенную точку проезда является большим, если дорога впереди движущегося впереди транспортного средства загружена другими транспортными средствами, рассматриваемое транспортное средство не сможет вернуться на полосу движения после обгона движущегося впереди транспортного средства. По этой причине при обработке управления на этапе S7 устройство 110 управления может вычислить первое оценочное значение, добавив состояние дороги впереди движущегося впереди транспортного средства ко времени прибытия в существенную точку проезда. Например, когда время прибытия к существенной точке проезда является большим, если устройство 110 управления обнаруживает на основе состояния дороги впереди движущегося впереди транспортного средства, что другие транспортные средства останавливаются в очереди на полосе перед движущимся впереди транспортного средства, устройство 110 управления пересчитывает первое оценочное значение, чтобы увеличить это первое оценочное значение. Следует отметить, что первое оценочное значение не обязательно должно постоянно уменьшаться по мере увеличения времени прибытия в существенную точку прохождения. Например, первое оценочное значение может постепенно уменьшаться по мере увеличения времени прибытия в существенную точку прохождения. Соотношение между временем прибытия к существенной точке прохождения и первым оценочным значением устанавливается заранее, и соотношение сохраняется в ПЗУ или т.п. устройства 110 управления.
[0042] следует отметить, что устройство 110 управления может вычислить первое оценочное значение в соответствии со скоростью движущегося впереди транспортного средства в дополнение ко времени прибытия, чтобы прибыть в существенную точку проезда. Когда время прибытия к существенной точке проезда совпадает, время или расстояние для обгона движущегося впереди транспортного средства увеличивается по мере того, как скорость движущегося впереди транспортного средства становится выше. В результате запасное время для возвращающегося транспортного средства с соседней полосы движения на полосу движения после обгона движущегося впереди транспортного средства становится короче. Следовательно, устройство 110 управления может вычислять первое оценочное значение, так что первое оценочное значение увеличивается по мере увеличения скорости движущегося впереди транспортного средства. Первое оценочное значение, вычисленное устройством 100 управления на основе времени прибытия в первую существенную точку прохождения, определяется как R0.
[0043] Кроме того, устройство 110 управления устанавливает целевую точку для вычисления первого оценочного значения (R1) в произвольном положении после прохождения через первую существенную точку проезда на втором маршруте движения. В случае с Фиг. 4, поскольку вторая существенная точка прохождения установлена в положение, близкое к первой существенной точке прохождения, устройство 110 управления устанавливает вторую существенную точку прохождения в целевую точку для вычисления первого оценочного значения (R1). Устройство 110 управления вычисляет время прибытия во вторую существенную точку прохождения и вычисляет первое оценочное значение (R1) на основе вычисленного времени прибытия. Например, первое оценочное значение оценивается в три этапа и может быть установлено на 0 баллов, если время прибытия велико, 1 балл, когда время прибытия среднее, и 2 балла, когда время прибытия короткое (когда время прибытия равно или больше первого заданного значения).
[0044] На этапе S9 устройство 110 управления вычисляет продолжительность (W) сокращения времени в пути, сокращенного в результате обгона движущегося впереди транспортного средства. Устройство 110 управления вычисляет время в пути до существенной точки обгона в случае обгона движущегося впереди транспортного средства на основе пройденного расстояния от текущего положения рассматриваемого транспортного средства до существенной точки обгона и ожидаемой средней скорости транспортного средства в случае обгона движущегося впереди транспортного средства. Ожидаемая средняя скорость транспортного средства зависит от скорости транспортного средства в момент обгона движущегося впереди транспортного средства и состояния дороги впереди движущегося впереди транспортного средства. Может использоваться состояние дороги, обнаруженное в последовательности управления на этапе S5. Например, когда время прибытия к существенной точке проезда велико и по дорожным условиям впереди движущегося впереди транспортного средства определяется, что другие транспортные средства поочередно останавливаются в непосредственной близости от перекрестка, даже если рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство, продолжительность (W) сокращения времени пробега является малой. Следовательно, устройство 110 управления определяет состояние дороги впереди движущегося впереди транспортного средства из состояния дороги впереди рассматриваемого транспортного средства и вычисляет среднюю скорость транспортного средства от обгона движущегося впереди транспортного средства до прибытия в существенную точку проезда в соответствии с указанными дорожными условиями.
[0045] Устройство 110 управления вычисляет время в пути до существенной точки проезда, когда рассматриваемое транспортное средство не обгоняет движущееся впереди транспортное средство, на основе пройденного расстояния от текущего положения рассматриваемого транспортного средства до существенной точки проезда и скорости транспортного средства, когда данное транспортное средство не обгоняет движущееся впереди транспортное средство. Скорость транспортного средства, когда рассматриваемое транспортное средство не обгоняет движущееся впереди транспортное средство, соответствует скорости транспортного средства движущегося впереди транспортного средства. Устройство 110 управления вычисляет продолжительность сокращения времени движения, сокращенного в результате обгона, путем вычитания времени в пути, когда рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство, из времени движения, когда рассматриваемое транспортное средство не обгоняет движущееся впереди транспортное средство. Когда продолжительность сокращения является положительной величиной, время в пути до существенной точки обгона сокращается за счет обгона движущегося впереди транспортного средства. С другой стороны, когда продолжительность сокращения является отрицательной величиной, время в пути до существенной точки проезда увеличивается из-за обгона движущегося впереди транспортного средства.
[0046] Устройство 110 управления вычисляет продолжительность (W) сокращения времени прохождения для каждой из множества существенных точек прохождения. В случае с Фиг. 4, устройство 110 управления вычисляет продолжительность (W0) времени сокращения пути до первой существенной точки прохождения. Кроме того, устройство 110 управления вычисляет продолжительность (W1) сокращения времени пути до второй существенной точки прохождения.
[0047] На этапе S10 устройство 110 управления вычисляет разницу (T) во времени из-за изменения маршрута. Разница во времени является разницей во времени, которая увеличивается при переходе с первого маршрута на второй. Устройство 110 управления вычисляет разницу во времени (T) путем вычитания времени в пути по первому маршруту движения из времени в пути по второму маршруту. В качестве времени в пути по первому маршруту путешествия и времени в пути по второму маршруту может использоваться результат вычисления навигационного устройства 230.
[0048] На этапе S11 устройство 110 управления вычисляет второе оценочное значение (J) в качестве индекса для определения, обогнать ли движущееся впереди транспортное средство, используя следующее уравнение (1):
J0=W0-R0 (1)
[0049] Отличие от первого оценочного значения (R) состоит в том, что во втором оценочном значении (J0), когда рассматриваемое транспортное средство движется по первому маршруту движения, продолжительность сокращения времени в пути сокращается за счет обгона движущегося впереди транспортного средства и вероятность того, что рассматриваемое транспортное средство может вернуться с соседней полосы движения на полосу движения после обгона движущегося впереди транспортного средства, добавляется к фактору определения того, обогнать ли движущееся впереди транспортное средство. Как выражено уравнением (1), устройство 110 управления вычисляет второе оценочное значение (J0) путем вычитания первого оценочного значения (R0) из продолжительности сокращения (W0) времени прохождения. Устройство 110 управления вычисляет второе оценочное значение (J0) для каждой существенной точки прохождения. При вычислении второго оценочного значения (J0) устройство 110 управления делает продолжительность сокращения (W0) безразмерной и, таким образом, согласовывает продолжительность сокращения (W0) с первым оценочным значением (R0). Например, продолжительность сокращения оценивается в три этапа. Продолжительность сокращения может быть установлена на 0 балов, когда она мала, 1 бал, когда она средняя, 2 бала, когда продолжительность сокращения большая (когда продолжительность сокращения является вторым заданным значением или больше).
[0050] Кроме того, когда второй маршрут движения установлен для одной существенной точки проезда, устройство 110 управления вычисляет второе оценочное значение (J1), когда рассматриваемое транспортное средство движется по второму маршруту движения, используя следующее уравнение (2):
J1=W1-R1-T (2)
[0051] Во втором оценочном значении (J1) продолжительность (W) сокращения времени в пути, сокращенного из-за обгона движущегося впереди транспортного средства, вероятность (R1) того, что рассматриваемое транспортное средство может вернуться с соседней полосы на полосу движения после обгона движущегося впереди транспортного средства, и разница (Т) во времени из-за изменения маршрута движения добавляются к коэффициенту определения того, обогнать ли движущееся впереди транспортное средство или нет. Как выражено Уравнением (2), устройство 110 управления вычисляет второе оценочное значение (J1) путем вычитания первого оценочного значения (R1) и разницы (T) во времени из-за изменения маршрута из продолжительности (W1) сокращения время в пути. При вычислении второго оценочного значения (J1) устройство 110 управления делает разность (T) во времени безразмерной и тем самым сопоставляет разницу (T) во времени с первым оценочным значением (R1). Например, разница во времени оценивается в три этапа. Разница во времени может быть установлена на 0 баллов, когда она мала, 1 балл, когда она средняя, 2 балла, когда она большая.
[0052] На этапе S12 устройство 110 управления определяет, является ли второе оценочное значение (J0), вычисленное с использованием уравнения (1), положительным значением. Когда второе оценочное значение (J0) является положительным значением, устройство 110 управления определяет то, что можно обогнать движущееся впереди транспортное средство, и выполняет управление обгоном на этапе S14.
[0053] Например, в случае, когда рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство, когда есть несколько других транспортных средств, движущихся между положением движущегося впереди транспортного средства и существенной точкой проезда, или когда нет других транспортных средств, остановленных в очереди между положение движущегося впереди транспортного средства и существенной точки проезда, чем больше расстояние движения от рассматриваемого транспортного средства до существенной точки проезда, тем больше продолжительность (W) сокращения времени движения. Когда продолжительность (W) сокращения велика, даже когда риск того, что рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения, в некоторой степени велик, уравнение (1) для определения становится положительным значением. Например, когда выполняется трехэтапная оценка, как описано выше, оценка продолжительности (W) сокращения дается как 2 балла, когда продолжительность (W) сокращения является большой. Следовательно, когда первое оценочное значение задано как 2 балла, когда время прибытия велико, 1 балл, когда время прибытия среднее, и 0 баллов, когда время прибытия короткое, Уравнение (1) для определения равно нулю или меньше только когда время прибытия равно первому оценочному значению. То есть в системе согласно одному или более вариантам осуществления настоящего изобретения, когда продолжительность (W) сокращения времени движения, сокращенного за счет обгона, велика (когда продолжительность сокращения равна или больше второго заданного значения), даже если существует риск того, что рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения до некоторой степени (когда первое оценочное значение меньше первого заданного значения), устройство 110 управления решает обогнать движущееся впереди транспортное средство. В результате система согласно одному или более вариантам осуществления настоящего изобретения может выполнять управление обгоном, когда ожидается, что время движения будет сокращено из-за обгона.
[0054] С другой стороны, когда продолжительность (W) сокращения мала (когда продолжительность сокращения меньше второго заданного значения), или когда риск того, что рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения, составляет значительно больше, чем продолжительность (W) сокращения, Уравнение (1) для определения принимает отрицательное значение. Например, когда трехэтапная оценка выполняется, как описано выше, поскольку оценка продолжительности (W) сокращения задается как 0, когда продолжительность (W) сокращения мала, Уравнение (1) для определения становится равным нулю или меньше независимо от того, является ли время прибытия длинным, средним или коротким в качестве первого оценочного значения. В этот момент устройство 110 управления не решает обгонять движущееся впереди транспортное средство. То есть, когда не ожидается, что время будет сокращено из-за обгона, система в соответствии с одним или более вариантами осуществления настоящего изобретения не определяет обгон движущегося впереди транспортного средства, даже когда существует высокая вероятность того, что рассматриваемое транспортное средство может вернуться из полосы, прилегающей к полосе движения после обгона (когда первое оценочное значение меньше первого заданного значения). В результате система согласно одному или более вариантам осуществления настоящего изобретения подавляет создание у пассажира ощущения того, что был совершен ненужный обгон.
[0055] Когда второе оценочное значение (J0), вычисленное с использованием Уравнения (1), равно 0 или меньше в процессе управления на этапе S12, устройство 110 управления определяет, является ли второе оценочное значение (J1), вычисленное с использованием Уравнения (2), положительным значением на этапе S13. Когда второе оценочное значение (J1) является положительным значением, устройство 110 управления определяет обгон движущегося впереди транспортного средства и выполняет управление обгоном на этапе S14.
[0056] Устройство 110 управления выполняет управление обгоном согласно следующей процедуре. Устройство 110 управления определяет наличие или отсутствие других транспортных средств в передней и задней областях рассматриваемого транспортного средства на соседней полосе на основе состояния дороги на соседней полосе, расположенной справа от направления движения рассматриваемого транспортного средства. Когда нет другого транспортного средства в передней и задней областях рассматриваемого транспортного средства на соседней полосе, устройство 110 управления определяет, что возможна смена полосы движения. Устройство 110 управления выдает команду управления для выполнения смены полосы движения на контроллер 280 транспортного средства. Рассматриваемое транспортное средство перемещается с полосы движения на соседнюю полосу. После того, как рассматриваемое транспортное средство обогнало движущееся впереди транспортное средство, или пока рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство, устройство 100 управления определяет наличие или отсутствие других транспортных средств в области впереди движущегося впереди транспортного средства на полосе движения на основе состояния дороги на полосе движения, расположенной с левой стороны от направления движения рассматриваемого транспортного средства (соответствующая исходной полосе движения перед обгоном). Затем устройство 110 управления определяет, что смена полосы движения возможна, когда нет другого транспортного средства в области впереди движущегося впереди транспортного средства на полосе движения. Устройство 110 управления выдает команду управления для выполнения смены полосы движения на контроллер 280 транспортного средства. Рассматриваемое транспортное средство перемещается с соседней полосы на полосу движения.
[0057] Когда второе оценочное значение (J1) равно или меньше нуля в процессе определения на этапе S13, устройство 110 управления определяет не выполнять обгон движущегося впереди транспортного средства и не выполняет управление обгоном на этапе S15.
[0058] Последовательность управления на этапе S13 будет описана со ссылкой на Фиг. 4. Например, когда продолжительность (W0) сокращения времени в пути до первой существенной точки проезда мала, или когда риск (R0) того, что рассматриваемое транспортное средство не может вернуться из соседней полосы на полосу движения к тому времени, когда рассматриваемое транспортное средство проходит первую существенную точку прохождения, превышает продолжительность (W0) сокращения времени прохождения, второе оценочное значение (J0), вычисленное на основе Уравнения (1), становится меньше нуля, и, следовательно, в этой точке устройство управления 110 не решает обгонять движущееся впереди транспортное средство. В таком случае, например, когда продолжительность (W1) сокращения времени движения до второй существенной точки проезда перед первой существенной точкой проезда велика, и риск (R0) того, что рассматриваемое транспортное средство не может вернуться из соседней полоса движения к полосе движения к тому времени, когда рассматриваемое транспортное средство проезжает вторую существенную точку проезда, меньше, чем продолжительность (W1) сокращения времени движения, второе оценочное значение (J1), вычисленное на основе Уравнения (2), становится положительным значением. Затем устройство 110 управления решает обогнать движущееся впереди транспортное средство. Перед тем, как рассматриваемое транспортное средство достигнет первой существенной точки обгона, выполняется контроль обгона. Например, если трехэтапная оценка выполняется, как описано выше, оценка продолжительности (W) сокращения дается как 2 балла, когда продолжительность (W) сокращения большая, и оценка первого оценочного значения (R1) дается как 1 балл, когда время прибытия среднее. Если нет разницы во времени (T) между первым маршрутом движения и вторым маршрутом движения, Уравнение (2) принимает положительное значение. То есть, даже когда первое оценочное значение (R0) велико и существует высокая вероятность того, что рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает первую существенную точку проезда, когда сокращение продолжительность (W1) времени в пути до второй существенной точки проезда велика, и когда существует риск (R0) того, что испытуемое транспортное средство не может вернуться с соседней полосы движения на полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает вторую существенную точку проезда меньше, чем продолжительность (W1) сокращения времени движения, рассматриваемое транспортное средство перемещается с полосы движения на соседнюю полосу, чтобы обогнать движущееся впереди транспортное средство с помощью управления обгоном. Когда рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает первую существенную точку проезда, маршрут движения рассматриваемого транспортного средства изменяется с первого маршрута на второй маршрут движения. Поскольку второе оцененное значение (J1), вычисленное на основе Уравнения (2), является положительным значением, ожидается, что время в пути до второй существенной точки обгона будет сокращено из-за обгона. Даже когда рассматриваемое транспортное средство не возвращается на исходную полосу движения после выполнения обгона, рассматриваемое транспортное средство движется по второму маршруту движения. Это предотвращает чрезмерное увеличение времени в пути из-за изменения маршрута.
[0059] Кроме того, например, когда продолжительность (W0) сокращения времени в пути до первой существенной точки проезда мала или когда существует риск (R0) того, что рассматриваемое транспортное средство не может вернуться с соседней полосы на полосу движения ко времени, когда рассматриваемое транспортное средство проезжает первую существенную точку проезда, больше, чем продолжительность (W0) сокращения времени движения, второе оценочное значение (J0), вычисленное на основе Уравнения (1), становится меньше нуля, так что устройство управления 110 не решает обгонять движущееся впереди транспортное средство в этот момент времени. В таком случае, например, когда существует низкая вероятность того, что рассматриваемое транспортное средство не сможет вернуться с соседней полосы на полосу движения к тому времени, когда рассматриваемое транспортное средство проедет вторую существенную точку проезда (т.е. когда первое оценочное значение (R2) является низким), второе оценочное значение (J1), вычисленное на основе Уравнения (2), становится положительным значением, и устройство 110 управления решает обогнать движущееся впереди транспортное средство. Перед тем, как рассматриваемое транспортное средство прибудет в первую существенную точку обгона, устройство 110 управления выполняет управление обгоном. Например, если трехэтапная оценка выполняется так, как описано выше, оценка продолжительности (W) сокращения дается как 1 балл, когда продолжительность (W) сокращения является средней, и оценка первого оценочного значения (R1) дается как 0, когда время прибытия короткое. Если нет разницы во времени (T) между первым маршрутом движения и вторым маршрутом движения, Уравнение (2) принимает положительное значение. То есть, даже когда первое оценочное значение (R0) велико и существует высокая вероятность того, что рассматриваемое транспортное средство не сможет вернуться с соседней полосы на полосу движения к тому времени, когда рассматриваемое транспортное средство пройдет первую существенную точку проезда, когда первое оценочное значение (R1) невелико, и существует низкая вероятность того, что рассматриваемое транспортное средство не сможет вернуться с соседней полосы на полосу движения к тому моменту, когда рассматриваемое транспортное средство проедет вторую существенную точку проезда, рассматриваемое транспортное средство переместится с полосы движения на соседнюю полосу движения для обгона движущегося впереди транспортного средства с помощью управления обгоном. Даже если рассматриваемое транспортное средство не может вернуться на полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает первую существенную точку проезда, рассматриваемое транспортное средство возвращается на полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает вторую существенную точку проезда. Это позволяет более безопасно и стабильно управлять обгоном.
[0060] Кроме того, например, когда продолжительность (W0) сокращения времени в пути до первой существенной точки проезда мала, или когда существует риск (R0) того, что рассматриваемое транспортное средство не может вернуться с соседней полосы движения на полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает первую существенную точку проезда, больше, чем продолжительность (W0) сокращения времени движения, второе оценочное значение (J0), вычисленное на основе Уравнения (1), становится меньше нуля, так что устройство 110 управления не решает обгонять движущееся впереди транспортное средство в этот момент времени. В таком случае, когда время в пути, когда рассматриваемое транспортное средство движется по второму маршруту движения, становится больше, чем время в пути, когда рассматриваемое транспортное средство движется по первому маршруту движения, разница (T) во времени из-за изменения маршрута движения становится большим, и второе оценочное значение (J1), вычисленное на основе Уравнения (2), становится меньше нуля. В результате устройство 110 управления решает не обгонять движущееся впереди транспортное средство, и устройство 110 управления не выполняет управление обгоном. Следовательно, когда рассматриваемое транспортное средство не может вернуться на полосу движения после обгона движущегося впереди транспортного средства, это предотвращает значительное увеличение времени в пути из-за изменения маршрута.
[0061] На этапе S15 устройство 110 управления определяет, прибыло ли рассматриваемое транспортное средство в пункт назначения, на основе текущего положения рассматриваемого транспортного средства. Когда рассматриваемое транспортное средство прибывает в пункт назначения, последовательность операций управления, показанная на Фиг. 2, заканчивается. Если рассматриваемое транспортное средство не прибыло в пункт назначения, устройство 110 управления возвращается к этапу S1 и выполняет последовательность операций управления, показанную на Фиг. 2.
[0062] Устройство 100 помощи при движении согласно одному или более вариантам осуществления настоящего изобретения сконфигурировано и работает так, как описано выше. Способ помощи при движении, выполняемый в устройстве 100 помощи при движении и бортовом устройстве 200, также выполняется так, как описано выше, и имеет следующие эффекты.
[0063] Как описано выше, способ помощи при движении транспортного средства в соответствии с одним или более вариантами осуществления настоящего изобретения включает в себя установку полосы движения, по которой движется рассматриваемое транспортное средство, на основе информации обнаружения датчика, установленного на рассматриваемом транспортном средстве, идентифицируя движущееся впереди рассматриваемого транспортного средства транспортное средство по полосе движения на основе информации обнаружения датчика, вычисление первого оценочного значения (R0) на основе информации обнаружения, вычисление продолжительности (W0) сокращения времени движения на основе скорости рассматриваемого транспортного средства и скорости движущегося впереди транспортного средства, и определение, обогнать ли движущееся впереди транспортное средство, на основе первого оценочного значения (R0) и продолжительности (W0) сокращения. В результате это предотвращает ненужный обгон. Ненужный обгон представляет собой, например, обгон в случае, при котором время движения не сокращается за счет обгона, хотя рассматриваемое транспортное средство может обогнать движущееся впереди транспортное средство и вернуться на полосу движения.
[0064] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает установку первого оценочного значения на меньшее значение, если вероятность того, что рассматриваемое транспортное средство может вернуться на полосу движения с соседней полосы, смежной с полосой движения, после обгона движущегося впереди транспортного средства оказывается выше. Затем способ помощи при движении может определять то, что не следует обгонять движущееся впереди транспортное средство, когда продолжительность сокращения времени в пути, сокращенного в результате обгона движущегося впереди транспортного средства, меньше второго заданного значения. Способ помощи при движении определяет обгон движущегося впереди транспортного средства, когда продолжительность сокращения больше или равна второму заданному значению, а первое оценочное значение меньше первого заданного значения. В результате это предотвращает выполнение ненужного обгона, поскольку управление обгоном может выполняться, когда ожидается сокращение времени в пути из-за обгона движущегося впереди транспортного средства, и существует высокая вероятность того, что данное транспортное средство может вернуться к полоса движения после обгона.
[0065] Кроме того, способ помощи при движении транспортного средства согласно одному или более вариантам осуществления настоящего изобретения включает вычисление первого времени в пути в случае, когда рассматриваемое транспортное средство движется по первому маршруту движения, и второго времени в пути в случае, когда рассматриваемое транспортное средство движется по второму маршруту движения, и определение, обогнать или нет движущееся впереди транспортное средство, на основе разницы во времени между временами движения в случае, когда маршрут движения изменяется на второй маршрут движения с первого маршрута движения. То есть, в случае, когда маршрут движения рассматриваемого транспортного средства изменяется с первого маршрута движения на второй маршрут движения, второе оценочное значение (J1) становится небольшим, когда разница во времени между временами движения велика, и, следовательно, процесс определения обгона выполняется в направлении, в котором обгон запрещен. С другой стороны, в случае, когда маршрут движения рассматриваемого транспортного средства изменяется с первого маршрута движения на второй маршрут движения, второе оценочное значение (J1) становится большим, когда разница во времени движения мала, и поэтому процесс определения обгона выполняется в направлении, в котором выполняется обгон. В результате, когда рассматриваемое транспортное средство не может вернуться на полосу движения, управление обгоном может выполняться с учетом приращения времени из-за изменения маршрута, и, следовательно, это ограничивает дополнительное время, необходимое, когда рассматриваемое транспортное средство не может вернуться в полосу движения.
[0066] Кроме того, способ помощи при движении согласно одному или более вариантам осуществления настоящего изобретения включает в себя вычисление второго оценочного значения (P1), указывающего, выполнять ли обгон с помощью уравнения вычисления с использованием первого оценочного значения (R1), уменьшения продолжительности времени в пути (W1) и разницы (T) во времени из-за изменения маршрута, а также выполнение обгона движущегося впереди транспортного средства, когда второе оценочное значение (P1) равно или превышает заданный порог оценки. В результате значение определения того, следует ли обгонять движущееся впереди транспортное средство, вычисляется с помощью заранее определенной функции, и на основе оценочного значения выполняется определение, выполнять ли обгон движущегося впереди транспортного средства, так что выполнение обгона может быть определено последовательным критерием определения. В результате это может обеспечить пассажиру возможность передвижения на основе стабильного критерия определения и подавить чувство дискомфорта, испытываемое пассажиром.
[0067] Кроме того, способ помощи при движении транспортного средства согласно одному или более вариантам осуществления настоящего изобретения включает установку существенной точки проезда на полосе движения и вычисление первого оценочного значения, указывающего вероятность того, что рассматриваемое транспортное средство может вернуться из соседней полосы на полосу движения к моменту, когда рассматриваемое транспортное средство проезжает существенную точку проезда после того, как рассматриваемое транспортное средство обгоняет движущееся впереди транспортное средство. В результате это предотвращает ненужный обгон.
[0068] Кроме того, способ помощи при движении транспортного средства согласно одному или более вариантам осуществления настоящего изобретения включает в себя установку существенной точки проезда на полосе движения и вычисление первого оценочного значения (R1), указывающего вероятность того, что рассматриваемое транспортное средство может вернуться из полосу, прилегающую к полосе движения, к тому времени, когда рассматриваемое транспортное средство проезжает существенную точку проезда. Второе оценочное значение (J2), когда существует низкая вероятность того, что рассматриваемое транспортное средство может вернуться из соседней полосы на полосу движения к тому времени, когда рассматриваемое транспортное средство проедет существенную точку проезда, и разница во времени (Т) будет короче, чем заранее определенная значение, превышает второе оценочное значение (J2), когда существует низкая вероятность того, что рассматриваемое транспортное средство может вернуться из соседней полосы на полосу движения к тому времени, когда рассматриваемое транспортное средство проедет существенную точку проезда, и разница (T) во времени составляет дольше заданного значения. В результате, даже если рассматриваемое транспортное средство не может вернуться на исходную полосу движения к тому времени, когда рассматриваемое транспортное средство проезжает существенную точку обгона после выполнения обгона, определение обгона движущегося впереди транспортного средства может быть выполнено, когда рассматриваемое транспортное средство может двигаться по маршрут движения перенаправления. В результате, на всем маршруте движения рассматриваемое транспортное средство может двигаться безопасно и стабильно.
[0069] Кроме того, способ помощи при движении согласно модификации настоящего варианта осуществления может корректировать второе оценочное значение (J2) с помощью следующих факторов при вычислении второго оценочного значения (J2).
[0070] Например, когда расстояние движения от рассматриваемого транспортного средства до пункта назначения меньше, чем заранее определенное расстояние, устройство 110 управления устанавливает второе оценочное значение (J2) меньшим, чем второе оценочное значение (J2), когда расстояние движения составляет больше, чем заданное расстояние, и тем самым корректирует второе оценочное значение (J2), чтобы не определять, что рассматриваемое транспортное средство может обогнать движущееся впереди транспортное средство. Когда пункт назначения находится далеко, время в пути можно ограничить от увеличения путем корректировки маршрута движения при изменении маршрута. Однако, когда пункт назначения близок, количество регулируемых маршрутов ограничено, и поэтому вероятность того, что время в пути станет больше из-за изменения маршрута, увеличивается. В способе помощи при движении транспортного средства в соответствии с модификацией, когда расстояние проезда до пункта назначения короче, чем заданное расстояние, трудно выполнять управление обгоном, и, следовательно, это сдерживает увеличение времени в пути.
[0071] В качестве другого примера, устройство 110 управления устанавливает второе оценочное значение (J2), когда второй маршрут движения включает шоссе, большее, чем второе оценочное значение (J2), когда второй маршрут движения не включает шоссе, и тем самым корректирует второе оценочное значение (J2), чтобы определить, может ли рассматриваемое транспортное средство обогнать движущееся впереди транспортное средство. Когда второй маршрут движения включает шоссе, разница (T) во времени в пути из-за изменения маршрута мала, и существует малая вероятность того, что время в пути станет большим из-за изменения маршрута. В результате, выполняя обгон на всем маршруте движения, это может дать пассажиру ощущение сокращения времени. Когда режим расчета маршрута в навигационном устройстве 230 установлен на режим общего приоритета или экономичный режим, при вычислении второго маршрута движения условие установки режима может быть удалено, и маршрут, по которому рассматриваемое транспортное средство проезжает через шоссе, может быть рассчитан предпочтительным образом. В режиме общего приоритета предпочтительно рассчитывается маршрут, по которому рассматриваемое транспортное средство проезжает не по шоссе, а предпочтительно проезжает по обычной дороге. В экономичном режиме предпочтительно рассчитывается маршрут, в котором рассматриваемое транспортное средство потребляет меньше энергии.
[0072] В качестве другого примера, устройство 110 управления устанавливает второе оценочное значение (J2), когда второй маршрут движения отклоняется от зоны автоматического движения, меньше второго оценочного значения (J2), когда второй маршрут движения не отклоняется от автоматического управляемой области, и тем самым корректирует второе оценочное значение (J2), чтобы не определять, что рассматриваемое транспортное средство может обогнать движущееся впереди транспортное средство. В результате это может препятствовать прерыванию автоматической операции, так что можно увеличить время выполнения автоматической операции.
[0073] Кроме того, в способе помощи при движении согласно другой модификации настоящего варианта осуществления, когда разность скоростей между движущимся впереди транспортным средством и собственным транспортным средством равна или меньше заданного порога скорости, способ помощи при движении может выполнять управление обгоном движущегося впереди транспортного средства независимо от результата определения, обогнать или нет движущееся впереди транспортное средство, на основе первого оценочного значения (R0) и сокращенного диапазона (W0). То есть, когда скорость движущегося впереди транспортного средства чрезвычайно мала, время движения становится чрезвычайно большим, если следовать за движущимся впереди транспортным средством. В способе помощи при движении согласно модифицированному примеру, когда скорость движущегося впереди транспортного средства чрезвычайно низка по сравнению со скоростью рассматриваемого транспортного средства, выполняется управление обгоном, так что может быть подавлено чувство дискомфорта, испытываемое пассажиром.
[0074] Устройство 100 помощи при движении согласно одному или более вариантам осуществления настоящего изобретения имеет ту же работу и эффекты, что и способ помощи при движении, описанный выше.
[0075] Следует отметить, что вышеописанные варианты осуществления были описаны для облегчения понимания настоящего изобретения, а не для его ограничения. Поэтому предполагается, что элементы, раскрытые в вышеуказанных вариантах осуществления, включают в себя все изменения в конструкции и эквиваленты, подпадающие под объем технических сведений в настоящем изобретении.
Перечень ссылочных позиций
[0076] 100 - устройство помощи при движении
110 - устройство управления
111 - процессор
120 - записывающее устройство
130 - устройство связи
200 - бортовое устройство
210 - устройство связи
220 - устройство обнаружения
221 - камера
222 - радиолокационное устройство
230 - навигационное устройство
231 - устройство определения положения
232 - записывающее устройство
240 - записывающее устройство
241 - информация о карте
242 - информация о полосе движения
243 - информация о правилах дорожного движения
250 - устройство вывода
251 - дисплей
252 - динамик
260 - датчик транспортного средства
261 - датчик угла поворота рулевого колеса
262 - датчик скорости транспортного средства
263 - датчик отношения
270 - устройство удержания полосы движения
280 - контроллер транспортного средства
290 - приводное устройство
295 - рулевое устройство
Изобретение относится к способу и устройству помощи при движении. Способ помощи при движении транспортного средства, выполняемый процессором. Способ включает установку полосы движения, по которой движется рассматриваемое транспортное средство, на основе информации обнаружения датчика, установленного на рассматриваемом транспортном средстве, идентификацию движущегося впереди транспортного средства, которое движется впереди рассматриваемого транспортного средства в полосе движения, на основе информации обнаружения датчика, вычисление на основе информации обнаружения датчика первого оценочного значения, указывающего вероятность того, что рассматриваемое транспортное средство может вернуться в полосу движения из соседней полосы, смежной с полосой движения, после обгона движущегося впереди транспортного средства, вычисление продолжительности сокращения времени движения, сокращенного за счет обгона движущегося впереди транспортного средства, на основе скорости рассматриваемого транспортного средства и скорости движущегося впереди транспортного средства и определение того, обогнать или нет движущееся впереди транспортное средство, на основе первого оценочного значения и продолжительности сокращения. Достигается повышение безопасности управления транспортным средством. 2 н. и 9 з.п. ф-лы, 4 ил.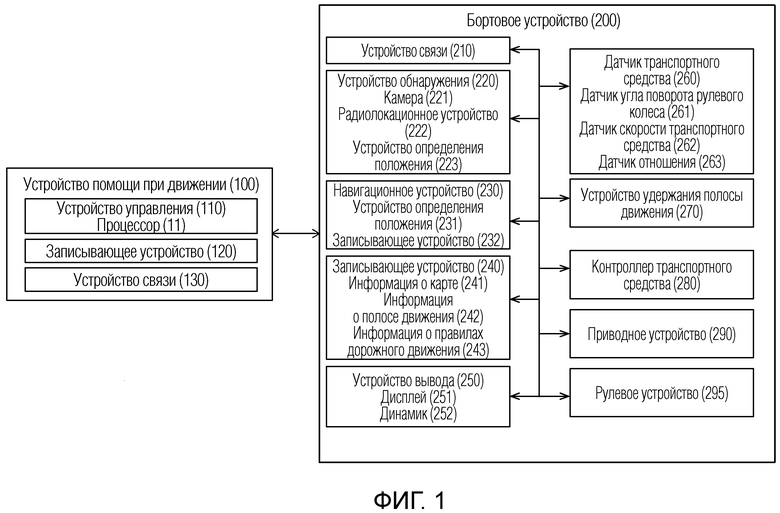
1. Способ помощи при движении транспортного средства, выполняемый процессором и включающий:
установку полосы движения, по которой движется рассматриваемое транспортное средство, на основе информации обнаружения датчика, установленного на рассматриваемом транспортном средстве;
идентификацию движущегося впереди транспортного средства, которое движется впереди рассматриваемого транспортного средства в полосе движения, на основе информации обнаружения датчика;
вычисление на основе информации обнаружения датчика первого оценочного значения, указывающего вероятность того, что рассматриваемое транспортное средство может вернуться в полосу движения из соседней полосы, смежной с полосой движения, после обгона движущегося впереди транспортного средства;
вычисление продолжительности сокращения времени движения, сокращенного за счет обгона движущегося впереди транспортного средства, на основе скорости рассматриваемого транспортного средства и скорости движущегося впереди транспортного средства; и
определение того, обогнать или нет движущееся впереди транспортное средство, на основе первого оценочного значения и продолжительности сокращения.
2. Способ помощи при движении транспортного средства по п. 1, включающий:
установку первого оценочного значения на меньшее значение при большей вероятности;
определение того, что не следует выполнять обгон движущегося впереди транспортного средства, когда продолжительность сокращения меньше второго заданного значения; и
определение того, что следует выполнить обгон движущегося впереди транспортного средства, когда продолжительность сокращения равна или превышает второе заданное значение, а первое оценочное значение меньше первого заданного значения.
3. Способ помощи при движении транспортного средства по п. 1, включающий:
вычисление первого маршрута движения, когда рассматриваемое транспортное средство может вернуться на полосу движения с соседней полосы движения после того, как рассматриваемое транспортное средство обогнало движущееся впереди транспортное средство, и к тому времени, когда рассматриваемое транспортное средство прибывает в заданную целевую точку;
вычисление второго маршрута движения, когда рассматриваемое транспортное средство не может вернуться на полосу движения с соседней полосы движения после того, как рассматриваемое транспортное средство обогнало движущееся впереди транспортное средство, и к тому времени, когда рассматриваемое транспортное средство прибывает в заданную целевую точку;
вычисление первого времени движения, когда рассматриваемое транспортное средство движется по первому маршруту движения, и второго времени движения, когда рассматриваемое транспортное средство движется по второму маршруту движения; и
определение того, обогнать или нет движущееся впереди транспортное средство, на основе разницы во времени между временами движения, когда рассматриваемое транспортное средство изменяет маршрут движения с первого маршрута движения на второй маршрут движения.
4. Способ помощи при движении транспортного средства по п. 3, включающий:
вычисление второго оценочного значения, указывающего то, выполнять ли обгон движущегося впереди транспортного средства или нет, по формуле вычисления, включающей первое оценочное значение, продолжительность сокращения и разницу во времени; и
выполнение обгона движущегося впереди транспортного средства, когда второе оценочное значение равно или превышает заданный оценочный порог.
5. Способ помощи при движении транспортного средства по любому из пп. 1-4, включающий:
установку существенной точки проезда на полосе движения; и
вычисление первого оценочного значения, указывающего вероятность того, что рассматриваемое транспортное средство может вернуться на полосу движения с соседней полосы движения до того, как рассматриваемое транспортное средство проедет существенную точку проезда после того, как рассматриваемое транспортное средство обогнало движущееся впереди транспортное средство.
6. Способ помощи при движении транспортного средства по п. 4, включающий:
установку существенной точки проезда на полосе движения, включенной в первый маршрут движения; и
вычисление первого оценочного значения, указывающего вероятность того, что рассматриваемое транспортное средство может вернуться на полосу движения с соседней полосы движения к тому времени, когда рассматриваемое транспортное средство проедет существенную точку проезда после того, как рассматриваемое транспортное средство обогнало движущееся впереди транспортное средство;
при этом второе оценочное значение, когда существует низкая вероятность возвращения рассматриваемого транспортного средства на полосу движения с соседней полосы к тому времени, когда рассматриваемое транспортное средство проезжает существенную точку проезда, а разница во времени меньше заданного значения, превышает второе оценочное значение, когда вероятность мала, а разница во времени превышает заданное значение.
7. Способ помощи при движении транспортного средства по п. 4 или 6, при котором второе оценочное значение, когда расстояние движения от текущего положения рассматриваемого транспортного средства до пункта назначения меньше заданного расстояния, меньше второго оценочного значения, когда пройденное расстояние превышает заданное расстояние.
8. Способ помощи при движении транспортного средства по любому из пп. 4, 6 и 7, при котором второе оценочное значение, когда второй маршрут движения включает в себя шоссе, превышает второе оценочное значение, когда второй маршрут движения не включает в себя шоссе.
9. Способ помощи при движении транспортного средства по любому из пп. 4 и 6-8, при котором второе оценочное значение, когда второй маршрут движения отклоняется от зоны автоматического движения, меньше второго оценочного значения, когда второй маршрут движения не отклоняется от зоны автоматического движения.
10. Способ помощи при движении транспортного средства по любому из пп. 1-9, включающий:
выполнение обгона движущегося впереди транспортного средства, когда разность скоростей между движущимся впереди транспортным средством и рассматриваемым транспортным средством равна или меньше заданного порогового значения разницы скоростей, независимо от результата определения того, выполнять обгон или нет движущегося впереди транспортного средства на основе первого оценочного значения и продолжительности сокращения.
11. Устройство помощи при движении, содержащее: датчик, установленный на рассматриваемом транспортном средстве; и процессор для выполнения процесса управления для поддержки движения рассматриваемого транспортного средства, при этом процессор выполнен с возможностью:
установки полосы движения, по которой движется рассматриваемое транспортное средство, на основе информации обнаружения датчика;
идентификации движущегося впереди транспортного средства, которое движется впереди рассматриваемого транспортного средства в полосе движения, на основе информации обнаружения датчика;
вычисления на основе информации обнаружения первого оценочного значения, указывающего вероятность того, что рассматриваемое транспортное средство может вернуться в полосу движения из соседней полосы движения, смежной с полосой движения, после обгона движущегося впереди транспортного средства;
вычисления продолжительности сокращения времени движения, сокращенного за счет обгона движущегося впереди транспортного средства, на основе скорости рассматриваемого транспортного средства и скорости движущегося впереди транспортного средства; и
определения того, обогнать или нет движущееся впереди транспортное средство, на основе первого оценочного значения и продолжительности сокращения.
| JP 2015168406 A, 28.09.2015 | |||
| WO 2017094316 A1, 08.06.2017 | |||
| СИСТЕМА, АССИСТИРУЮЩАЯ ВОДИТЕЛЮ ТРАНСПОРТНОГО СРЕДСТВА, ТРАНСПОРТНОЕ СРЕДСТВО С УКАЗАННОЙ СИСТЕМОЙ И СПОСОБ ОКАЗАНИЯ ПОДДЕРЖКИ ВОДИТЕЛЮ ПРИ УПРАВЛЕНИИ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2010 |
|
RU2555248C2 |

