Настоящее изобретение относится к строительной машине, в частности в виде крана, башенного экскаватора и тому подобного, с электронным устройством управления для управления и/или регистрации рабочих параметров, а также, по меньшей мере, с одним приводным устройством для перемещения функционального элемента, в частности грузозахватного средства.
Строительные машины с электронным управлением имеют, как правило, управляющее вычислительное устройство, которое может управлять различными функциональными элементами, такими как грузоподъемные крюки, инструменты или исполнительные органы, приводами или устройствами контроля и/или соединено с датчиками, контрольными устройствами или другими средствами регистрации, для того чтобы определенные рабочие параметры регистрировать и сохранять. При этом могут выполняться заданные управляющим вычислительным устройством программы управления, и/или могут выполняться вводимые оператором машины команды управления, которые управляющее вычислительное устройство использует для управления соответствующими исполнительными органами или приводами или преобразовывает в соответствующую обработку данных.
Для того чтобы была возможность вводить команды управления или наоборот отображать контролируемые рабочие параметры, устройство управления строительной машины включает в себя при этом, как правило, клавиши управления, рычаги управления, такие как джойстики, командные выключатели, сенсорный экран или другие подключаемые при необходимости снаружи средства ввода, а также устройство отображения, например, в виде монитора или другое устройство вывода данных, которые могут соединяться с указанным управляющим вычислительным устройством и либо могут быть предусмотрены непосредственно на посте управления, либо могут быть также подключены к дистанционному управлению.
Дополнительно к установленным стационарно устройствам ввода и/или вывода, которые допускают управление на самом посте управления, уже было предложено использовать мобильный терминал, который выполнен наподобие планшета, блока дистанционного управления или мобильного телефона и может беспроводным образом сообщаться с управляющим вычислительным устройством устройства управления. Такой мобильный терминал существенно облегчает управление и контроль строительной машины. Тем не менее, при использовании таких мобильных терминалов возникают иногда проблемы в обращении. Например, оператор машины может забывать при спуске терминал на посте управления, так что выданные терминалом надзорные сообщения не воспринимаются или лишь с задержкой по времени становятся известными оператору машины. С другой стороны может быть затруднительным одновременно задействовать терминал или снимать показания с терминала и выполнять другие действия, например, выполнять производимое обеими руками управление или манипулирование машиной, такое как насадка грузоподъемного крюка или смещение ковша для подачи бетонной смеси.
Исходя из этого, в основе данного изобретения лежит задача создать улучшенную строительную машину указанного вначале типа, которая предотвращает недостатки уровня техники и совершенствует его предпочтительным образом. В частности с высоким удобством обслуживания должно достигаться простое в обращение управление и контролирование машины, которое в минимальной степени отвлекает оператора машины от других обязанностей, таких как наблюдение за функциональным элементом и тому подобное.
Согласно изобретению указанная задача решается с помощью строительной машины согласно пункту 1 формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Таким образом, согласно одному аспекту изобретения предлагается направлять функциональный элемент строительной машины в необходимом направлении вследствие того, что манипуляционные усилия оказываются вручную на функциональный элемент или закрепленный на нем конструктивный элемент, или функциональный элемент перемещается вручную в определенном направлении, что затем поддерживается приводами строительной машины. Если функциональный элемент вручную нажимается или тянется и/или поворачивается в определенном направлении или это, по меньшей мере, пробуется, эти попытки движения регистрируются и преобразовываются в соответствующее установочное движение строительной машины. Согласно изобретению предусмотрено устройство регистрации для регистрации выполненных вручную манипуляционных усилий и/или движений, которые оказываются на функциональный элемент и/или выполняются на функциональном элементе, причем устройство управления строительной машины выполнено для того, чтобы управлять, по меньшей мере, одним приводным устройством для перемещения функционального элемента в зависимости от зарегистрированного манипуляционного усилия и/или движения.
Указанное устройство регистрации выполнено при этом в частности также для того, чтобы регистрировать направление выполненных вручную манипуляционных усилий и/или движений, так что устройство управления может управлять указанным приводным устройством таким образом, что функциональный элемент движется в соответствующем направлении, и вызванное приводным устройством направление движения, по меньшей мере, по существу соответствует направлению ручной попытки манипуляции.
Альтернативно или дополнительно указанное устройство регистрации может быть выполнено также для того, чтобы регистрировать по модулю силу или величину выполненного вручную манипуляционного усилия и/или движения, причем устройство управления может адаптировать к ней скорость и/или ускорение и/или установочный ход созданного двигателем приводного движения функционального элемента. Если, например, грузовой крюк крана или закрепленный на нем конструктивный элемент сильнее или дальше нажимается или тянется и/или поворачивается в некотором направлении, то устройство управления может выполнять соответствующее приводное движение для перемещения грузового крюка быстрее или дальше по установочному ходу. Наоборот, более тонкая ручная манипуляция может преобразовываться в более тонкую, меньшую моторизованную манипуляцию.
Такое преобразование ручной попытки манипулирования функциональным элементом строительной машины или захваченным им конструктивным элементом в соответствующее моторизованное манипулирование функциональным элементом позволяет наиболее простое, интуитивное управление строительной машиной и ее функциональным элементом и дает оператору машины ощущение возможности легко и без усилий сдвигать, тянуть и/или поворачивать функциональный элемент строительной машины и захваченный им при необходимости конструктивный элемент в необходимом направлении, несмотря на то, что, как правило, обрабатываемые или перемещаемые строительными машинами конструктивные элементы обладают высокими весами.
Зарегистрированное устройством регистрации ручное манипуляционное усилие и/или движение не должно при этом оказываться непосредственно на функциональный элемент или захваченный им конструктивный элемент, а может быть также предусмотрено то, что устройство регистрации регистрирует выполненное на функциональном элементе манипуляционное движение, например движение руки в смысле взмаха вверх или вниз, и интерпретирует его как команду управления, которая затем устройством управления строительной машины преобразовывается в соответствующее установочное движение приводного устройства. Такое исполнение устройства регистрации позволяет управлять жестами строительной машиной и ее функциональным элементом, что разъясняется более подробно в дальнейшем.
Указанное устройство регистрации может быть выполнено при этом принципиально по-разному. Если, например, строительная машина выполнена в виде крана или башенного экскаватора, и соответственно функциональный элемент подвешен с возможностью качания - как например грузовой крюк крана на его подъемном тросе или захват башенного экскаватора на его тросе -, в усовершенствовании изобретения устройство регистрации может иметь средства определения для определения отклонения подвешенного с возможностью качания функционального элемента относительно вертикали, которая может проходить через точку качающегося подвеса. Предпочтительно устройство управления может быть при этом выполнено для того, чтобы управлять, по меньшей мере, одним приводным устройством в зависимости от зарегистрированного отклонения, в частности таким образом, что вызванное приводным устройством установочное движение элемента строительной машины пытается компенсировать зарегистрированное отклонение. Если, например, у крана регистрируется наклонная тяга подъемного троса или закрепленного на нем грузового крюка, которая проходит, например, от башни крана в направлении стрелы крана вперед, то устройство управления может перемещать крановую ходовую тележку по стреле крана дальше вперед, для того чтобы компенсировать наклонную тягу. Если, например, наклонная тяга грузового крюка регистрируется поперек к вертикальной плоскости через стрелу крана, то устройство управления может приводить в действие механизм поворота крана, для того чтобы поворачивать стрелу крана снова в вертикальное положение через грузовой крюк.
Указанное определение отклонений подвешенного с качанием функционального элемента может реализовываться при этом по-разному, например вследствие того, что с подъемным тросом согласовывается датчик наклона. Предпочтительно средства определения для определения отклонения относительно вертикали могут также включать в себя, по меньшей мере, один датчик изображения (визуализационный датчик), в частности камеру, ось взгляда которого/которой может проходить предпочтительно вертикально вниз и, по меньшей мере, примерно коаксиально к вертикали через точку подвеса, так что отклонения подвешенного с качанием функционального элемента приводят к тому, что графическое изображение функционального элемента, например грузового крюка крана, передается из центра изображения. При помощи устройства оценки изображения предоставленное датчиком изображения или камерой изображение может оцениваться в отношении эксцентриситета составной части изображения, которая воспроизводит функциональный элемент или связанную с ним маркировку, из чего затем устройство управления может генерировать соответствующую команду управления, по меньшей мере, для одного приводного устройства.
Указанным ранее образом могут при этом учитываться направление отклонения и/или величина отклонения, для того чтобы адаптировать направление и/или ускорение и/или силу или величину вызванного двигателем установочного движения.
Альтернативно или дополнительно к такому определению вызванного ручными манипуляционными усилиями и/или движениями отклонения функционального элемента вышеуказанное устройство регистрации может также иметь присоединяемый к функциональному элементу строительной машины и/или к установленному на нем, конструктивному элементу модуль управления, который может иметь, по меньшей мере, один орган управления для ввода команд управления, в зависимости от которых функциональный элемент перемещается затем устройством управления.
Для того чтобы делать возможным интуитивное управление, указанный, по меньшей мере, один орган управления модуля управления перемещением может иметь оси движения, которые совпадают с осями перемещения функционального элемента строительной машины или, по меньшей мере, примерно соответствуют им. В частности движение органа управления в определенном направлении может вызывать перемещение строительной машины или ее функционального элемента в соответствующем направлении, и/или поворот органа управления вокруг оси вращения может преобразовываться в поворот функционального элемента вокруг параллельной к ней оси поворота в соответствующем направлении.
Орган управления присоединяемого или установленного неразъемно на перемещаемом функциональном элементе модуля управления может быть, например, джойстиком (рычажным манипулятором), который может наклоняться в различных осях, для того чтобы создавать движения перемещения в соответствующих направлениях, и/или может поворачиваться, для того чтобы делать возможным поворот конструктивного элемента, как это было описано ранее. Альтернативно или дополнительно сдвиговые и/или нажимные клавиши и/или сенсорный экран, на котором могут регистрироваться движения пальцев в определенных направлениях или поворотных движениях, могут использоваться в качестве органа управления, например, могут быть смонтированы на грузовом крюке или предусмотрены на присоединяемом к нему модуле управления.
Предпочтительно этот модуль управления перемещением или его, по меньшей мере, один орган управления предусмотрен не в кабине оператора машины - где, конечно, могут быть также предусмотрены соответствующие средства перемещения -, а в непосредственной близости перемещаемого функционального элемента строительной машины, например непосредственно на грузом крюке или на несущем грузовой крюк отклоняющем шкиве крана. Например, на грузовом крюке или соединенном с ним элементе конструкции могут быть смонтированы на его четырех сторонах в каждом случае нажимные клавиши, которые при нажатии вызывают движение перемещения в направлении движения нажатия, вследствие чего создаются условия для интуитивной тонкой юстировки ориентации или положения грузового крюка. Альтернативно или дополнительно может быть предусмотрена поворачиваемая вокруг вертикальной оси кнопка управления поворотом, при помощи которой грузовой крюк или крановая тележка может посредством подходящего поворотного устройства поворачиваться вокруг вертикальной оси, для того чтобы можно было устанавливать необходимый угол направления.
Альтернативно или дополнительно к такому модулю тонкой юстировки и управления положением непосредственно на грузозахватном средстве или закрепленном на нем конструктивном элементе указанный модуль управления перемещением может быть также реализован в виде мобильного блока управления, например, в виде планшета или блока с джойстиком и/или комбинации из них, который находящийся на направляемом функциональном элементе оператор машины может носить с собой. Ориентация заданных на планшете или джойстике осей управления может очень просто приводиться в соответствие с осями движения строительной машины, например, вследствие того, что сам оператор машины или планшет или блок с джойстиком приводится в заданную ориентацию относительно строительной машины, например сам оператор машины в ориентацию спиной к башне крана под его стрелой и/или планшет в определенную ориентацию к стреле крана и/или сам оператор машины или планшет в определенную ориентацию к сооружению, которое может возводиться, и ориентацию которого естественно знает модель данных о сооружениях.
Альтернативно или дополнительно модуль управления может также закрепляться на перемещаемом конструктивном элементе, положением и ориентацией которого должны, в конечном счете, управлять, например, посредством магнитных крепежных средств, вакуумных присосок, стопорных фиксаторов или тому подобного. Например, соответствующий планшет управления или блок с джойстиком для тонкой юстировки может позиционироваться на размеченной точке монтажа на конструктивном элементе, для того чтобы указанным образом была возможность производить тонкую юстировку или позиционирование.
Посредством, например, временного размещения модуля управления перемещением на юстируемом конструктивном элементе и/или на захватывающем конструктивный элемент грузозахватном средстве в заданной ориентации к нему, что может осуществляться, например, посредством фиксации на конструктивном элементе и/или на грузозахватном средстве и/или посредством размещенной не нем маркировки, одновременно возможно подходящим образом увязывать оси ориентации органа управления модуля управления перемещением с осями движения строительной машины, так как временное размещение в заданной ориентации задает оси движения органа управления и делает возможным интуитивное управление. Если, например, планшет или блок с джойстиком или тому подобное позиционируется в заданной ориентации на основной поверхности готовой стены, то управление крана распознает, например, при помощи подходящей сенсорной техники ориентацию стены, так что нажатие стрелок вправо/влево/вверх/вниз или соответствующее скользящее движение на планшете или движение джойстика может преобразовываться в установочное движение крана в необходимом направлении. При размещении на самом функциональном элементе, например на заданной главной стороне грузового крюка или на блочной обойме грузового крюка, управление крана знает ориентацию модуля управления перемещением, так как согласно назначению ориентация грузового крюка известна.
Альтернативно или дополнительно достигаемая функциональным элементом строительной машины конечная точка может также маркироваться лазерным указателем. Устройство управления строительной машины или ее устройство регистрации может иметь для этого подходящее, в частности оптическое, средство регистрации для регистрации созданной лазерным указателем лазерной световой точки, причем указанное устройство регистрации выполнено предпочтительно таким образом, что могут определяться положение лазерной световой точки и/или ее пространственные координаты, а именно предпочтительно в трехмерной системе координат. В частности положение лазерной световой точки может идентифицироваться в привязанной к строительной машине системе координат, например при помощи монтируемой на кране, дающей изображение сенсорной техники. В зависимости от зарегистрированной лазерной световой точки и ее положения устройство управления может управлять затем строительной машиной таким образом, что ее функциональный элемент перемещается к лазерной световой точке.
В предпочтительном усовершенствовании изобретения указанный модуль управления перемещением для точного позиционирования захваченного в каждом случае груза может сообщаться беспроводным образом с устройством управления строительной машины, причем может быть предусмотрена, например, радиопередача управляющих сигналов. Однако альтернативно может также осуществляться проводная передача управляющих сигналов, например через подъемный трос, на котором закреплен грузовой крюк крана.
Согласно другому аспекту настоящего изобретения может быть предусмотрено выполнять, по меньшей мере, один мобильный электронный компонент устройства управления в виде так называемого "носимого" компонента, который, без того чтобы была необходимость брать его рукой, размещен и носится на теле человека. При этом мобильный электронный компонент может иметь средства ввода для ввода команд управления в управляющее вычислительное устройство устройства управления и может быть интегрирован в носимую согласно назначению на теле оператора машины функциональную часть, которая имеет адаптированные по форме к телу человека крепежные средства для закрепления на части тела. Функциональная часть образует часть надеваемой одежды, которую оператор машины надевает на свою часть тела, вследствие чего электронный компонент носится на теле автоматически. Электронный компонент может без активного содействия или захвата оператором машины носиться на его теле, не ухудшая при этом свободу движения кистей, рук и ног оператора машины, так что хотя оператор машины постоянно носит электронный компонент устройства управления на теле, тем не менее, не смотря на это, одновременно имеет свободными кисти, руки и ноги, для того чтобы выполнять другие манипуляционные задачи, такие как насадка грузового крюка, направление ковша для подачи бетонной смеси при бетонировании или тому подобное. При этом оператор машины может через надетую на тело часть надеваемой одежды вводить команды управления в управляющее вычислительное устройство устройства управления строительной машины, без того чтобы оператор машины должен был бы сначала искать соответствующий рычаг управления на посте оператора машины. Альтернативно или дополнительно электронный компонент может также показывать оператору машины данные, которые относятся к эксплуатации машины. И то и другое в частности полезно, если оператор машины отвернулся, например, на посте управления от панели приборов, и ее рычаги управления не находятся больше перед ним, или он на функциональном элементе отвернулся от него, и позволяет быстро реагировать в критических ситуациях.
Носимая согласно назначению на теле функциональная часть, в которую интегрирован указанный электронный компонент, может при этом вне зависимости от функции электронного компонента выполнять или осуществлять дальнейшие функции, в частности тело оператора машины защищать, покрывать, сохранять в тепле или закутывать.
В частности указанный мобильный электронный компонент может быть интегрирован в предмет одежды, как например куртку или брюки. Например, электронный компонент может быть воткан, вшит в предмет одежды или может быть постоянно на нем закреплен другим образом, так что надетый оператором машины предмет одежды несет электронный компонент и имеет его при себе.
Предпочтительно мобильный электронный компонент устройства управления может быть интегрирован в перчатку.
Интеграция мобильного электронного компонента в перчатку позволяет разнообразными способами вводить команды управления в управляющее вычислительное устройство. Например, средства ввода для ввода таких команд управления могут включать в себя, по меньшей мере, один пьезодатчик, который может быть интегрирован в перчатку, для того чтобы посредством сжатия и/или изгиба и/или растягивания пьезоэлемента была возможность генерировать команду управления, например посредством сжатия кулака и/или раздвигания несущих перчатку пальцев и/или прижатия друг к другу двух подушечек пальцев, с которыми согласован пьезоэлемент. Однако при помощи такого пьезодатчика может также обнаруживаться, например, тот момент, когда несущая перчатку кисть руки оператора машины начинает вдруг плотно сжимать ручку управления, например, в виде джойстика, из чего, например, может делаться вывод от том, что имеется опасная ситуация, благодаря которой могут инициироваться затем соответствующие реакции управления, например торможение установочного движения строительной машины.
Как было ранее разъяснено в отношении варианта планшета, направление команды сжатия или движения перчатки может при этом регистрироваться или определяться, например, вследствие того, что перчатка прикладывается к заданному месту конструктивного элемента, например, к передней стороне перемещаемой готовой стены, ориентацию которого/которой устройство управления строительной машины знает или регистрирует подходящей сенсорной техникой, например смотрящей со стрелы крана вниз камерой. Если устройство управления знает ориентацию конструктивного элемента или грузозахватного средства, к которому прикладывается перчатка, то устройство управления также знает ориентацию перчатки.
Однако альтернативно или дополнительно было бы также возможно регистрировать ориентацию перчатки подходящей сенсорной техникой, например гироскопическими датчиками и/или элементами компаса и/или датчиками наклона и/или GPS-модулями и т.д., для того чтобы определенные сигналы сжатия интегрированных в перчатку датчиков в определенных направлениях движения согласовывать с производимым установочным движением.
Такая перчатка может включать в себя также несколько датчиков, например датчиков давления, с которыми согласованы различные направления движения или функции управления, так что, например, посредством нажатия размещенного на указательном пальце датчика может инициироваться другое движение перемещения, чем посредством нажатия датчика на ладони.
Альтернативно или дополнительно к такому пьезоэлементу средства ввода для ввода команд управления могут включать в себя также датчик ускорения и/или ориентации, при помощи которого могут регистрироваться движения несущей электронный компонент части тела. В частности могут регистрироваться движения кисти руки, если указанный датчик ускорения и/или ориентации интегрирован в перчатку. При помощи такого датчика ускорения и/или ориентации может реализовываться в частности управление жестами. Если регистрируются определенные движения части тела, ускорение и/или скорость которых достигают или превышают определенный уровень, и/или направление которых проходит в определенном пространственном направлении, могут соответствующие команды управления передаваться на управляющее вычислительное устройство строительной машины.
В частности электронный компонент может быть выполнен при этом таким образом, что между направлениями движений части тела и направлениями соответствующих установочных движений рабочего агрегата существует корреляция, в частности в том отношении, что например направленное вверх движение электронного компонента преобразовывается в направленное вверх движение функционального элемента, в частности грузового крюка или черпака экскаватора, и/или направленное вниз движение электронного компонента преобразовывается в направленное вниз движение функционального элемента.
Если, например, при интегрированном в перчатку, указанном электронном компоненте кисть руки рывком движется вверх, так что ускорение и/или скорость в примерно вертикальном направлении достигает определенной величины, то может, например, грузовой крюк крана подниматься. Наоборот, направленные вниз движения кисти руки, которые обладают соответствующей скоростью и/или ускорением вниз, могут преобразовываться в опускание рабочего агрегата.
Несмотря на то, что вышеописанные средства ввода в виде пьезоэлемента, датчика ускорения и/или ориентации и/или положения были описаны в связи с перчаткой, эти средства ввода могут также согласовываться с другими предметами одежды или другими носимыми на теле аксессуарами и соответственно могут быть интегрированы в них.
Альтернативно или дополнительно определенные движения кисти руки могли бы также регистрироваться другим образом, например посредством оптического устройства регистрации, которое могло бы быть размещено, например, на панели приборов или на посте управления строительной машины и могло бы быть направлено на лежащие обычно неподвижно на колесе управления или главном рычаге управления кисти рук оператора машины.
Альтернативно или дополнительно такое оптическое устройство регистрации для регистрации движений кисти руки или движений других частей тела может быть также предусмотрено на направляемом функциональном элементе или присоединяемом к нему модуле управления перемещением, для того чтобы создавать условия для управления жестами указанного типа не только на панели приборов поста оператора, но и непосредственно на направляемом функциональном элементе.
Указанное оптическое устройство регистрации и/или нижестоящее устройство оценки изображения устройства управления жестами могут быть при этом сконфигурированы предпочтительно для того, чтобы регистрировать или обнаруживать заданные знаки кисти руки и/или знаки части тела, которые могут сопровождаться, например, определенным положением тела (осанкой) и/или могут соответствовать определенным ориентациям кистей рук и/или рук и/или ног.
Альтернативно или дополнительно вышеописанный/другой мобильный электронный компонент может быть также интегрирован в ботинок или головной убор, как например каска или кепка.
Альтернативно или дополнительно к такому интегрированному в предмет одежды электронному компоненту может быть также предусмотрен мобильный электронный компонент, который интегрирован в носимый на теле аксессуар или функциональную деталь личного пользования, в частности в часы или очки.
Например, указанный электронный компонент может быть интегрирован в умные часы, которые через указанный электронный компонент могут сообщаться с устройством управления строительной машины, в частности могут передавать команды управления в управляющее вычислительное устройство и/или отображать управляющие данные, поступающие от управляющего вычислительного устройства. В частности на дисплее таких умных часов может также отображаться изображение окружения строительной машины, которое предоставляется, например, камерой на крановой тележке, дроном (беспилотным летательным аппаратом) с камерой или другой дающей изображение сенсорной техникой.
Альтернативно или дополнительно к таким умным часам может также использоваться проекционный браслет, который актуальные данные может проецировать непосредственно на предплечье и/или при помощи специальной сенсорной техники может регистрировать наподобие сенсорного экрана вводы данных пользователем, например движения кончиков пальцев в проецируемом изображении.
Альтернативно или дополнительно электронный компонент может быть интегрирован в умные очки, которые оператор машины носит на носу или перед глазами, причем на умных очках могут отображаться управляющие данные. Умные очки могут иметь для этого, например, проекционный дисплей, который проецирует данные, по меньшей мере, на одну линзу очков и/или имеет прозрачное дисплейное стекло, на котором, например, в соответствии с принципом жидких кристаллов могут изображаться данные. Одновременно указанные умные очки могут также выполнять функцию, поддерживающую зрительную функцию, например включать в себя шлифованные оптические стекла.
Альтернативно или дополнительно к таким умным очкам могут также использоваться выполненные в виде проекционного дисплея контактные линзы, которые актуальные данные могут высвечивать непосредственно перед глазом.
Альтернативно или дополнительно мобильный электронный компонент может быть интегрирован в акустическую гарнитуру, которая может включать в себя позиционируемый на ухе динамик и/или позиционируемый рядом со ртом микрофон, для того чтобы была возможность акустически выдавать управляющие и/или рабочие данные и/или акустически вводить команды управления. Акустически введенные команды управления могут регистрироваться устройством распознавания речи и преобразовываться в соответствующие команды управления. Так как для направления функционального элемента конкретной строительной машины, например грузового крюка крана, является достаточным ограниченное количество команд управления, например, в виде "крюк вверх", "крюк вниз", "крюк вперед", "крюк назад", "крюк влево", "крюк вправо", устройство распознавания речи может также хорошо работать в акустически неблагоприятном окружении, таком как стройплощадка с множеством посторонних шумов.
В зависимости от функциональных возможностей устройства управления строительной машины указанный "носимый" компонент может быть оснащен принципиально по-разному. Предпочтительно указанный компонент может включать в себя оптические и/или акустические и/или осязательные средства отображения, например в виде дисплея и/или зуммера и/или динамика и/или вибрационного элемента.
Если предусмотрены интегрированные, например, в ботинок и/или перчатку электронные компоненты, то сообщения могут доноситься посредством вибрации ботинка и/или вибрации перчатки и/или дополнительно отображаться на дисплее. Альтернативно или дополнительно может также выдаваться акустическое сообщение.
Альтернативно или дополнительно сообщения могут отображаться на дисплее умных часов или изображаться на умных очках, причем также в этом случае могут выдаваться дополнительные акустические и/или осязательные сообщения.
В предпочтительном усовершенствовании изобретения может быть при этом предусмотрено, что носимые на различных частях тела компоненты или электронные компоненты отображают различные управляющие данные или различную информацию, так что оператор машины интуитивно понимает, какая функция управления отражается. Например, первый рабочий параметр, такой как опасное превышение допустимой грузоподъемности крана, может отображаться вибрацией ботинок, второй рабочий параметр, как например вход в границу рабочей области, может отображаться вибрацией перчатки, и третий рабочий параметр, такой как достижение расчетного положения ковшом для бетонирования, может отображаться жужжанием умных часов. Предпочтительно с различными рабочими параметрами и/или различными функциями машины могут быть согласованы в каждом случае отдельные электронные компоненты и/или режимы отображения на различных предметах одежды и/или на различных частях тела.
Альтернативно или дополнительно с различными рабочими параметрами и/или различными функциями управления строительной машины могут быть согласованы различные режимы отображения одного и того же электронного компонента. Например, перегрузка может отображаться вибрацией перчаток, а достижение границы рабочей области может отображаться свечением светодиодов (LED) на перчатке. Указанные различные сигналы отображения могут при этом также отображаться на различных электронных компонентах и/или на различных участках функциональной одежды, например вышеуказанная перегрузка вибрацией ботинок, а достижение границы рабочей области свечением перчаток.
Для ввода команд управления, по меньшей мере, один электронный компонент может обладать принципиально разными средствами ввода. Например, может быть предусмотрен сенсорный экран, который посредством касания может генерировать сигналы ввода, причем такой сенсорный экран может предпочтительно отображать управление меню и/или клавишное наборное поле наподобие клавиатуры, для того чтобы была возможность вводить печатные команды. Альтернативно или дополнительно в качестве средств ввода могут быть предусмотрены нажимные или установочные переключатели, например в виде ползунковых переключателей, нажимные кнопки или качающиеся рычаги, например в виде нажимных кнопок на умных часах.
Альтернативно или дополнительно в качестве средства ввода может быть также пьезоэлемент интегрирован в носимую на теле функциональную часть, например в виде пьезомембраны, которая вшита, воткана или интегрирована другим образом в участок предмета одежды. Например, такой пьезоэлемент может быть интегрирован в области пальца перчатки, так что посредством сгибания пальца и тем самым деформирования пьезоэлемента может вводиться соответствующий управляющий сигнал.
Альтернативно или дополнительно такой пьезоэлемент может быть интегрирован, например, в подошву ботинка, так что, например, посредством интенсивного топтания ногами по земле может генерироваться управляющий сигнал.
Изобретение разъясняется в дальнейшем более подробно при помощи предпочтительного примера осуществления и приложенного чертежа. На чертеже показаны:
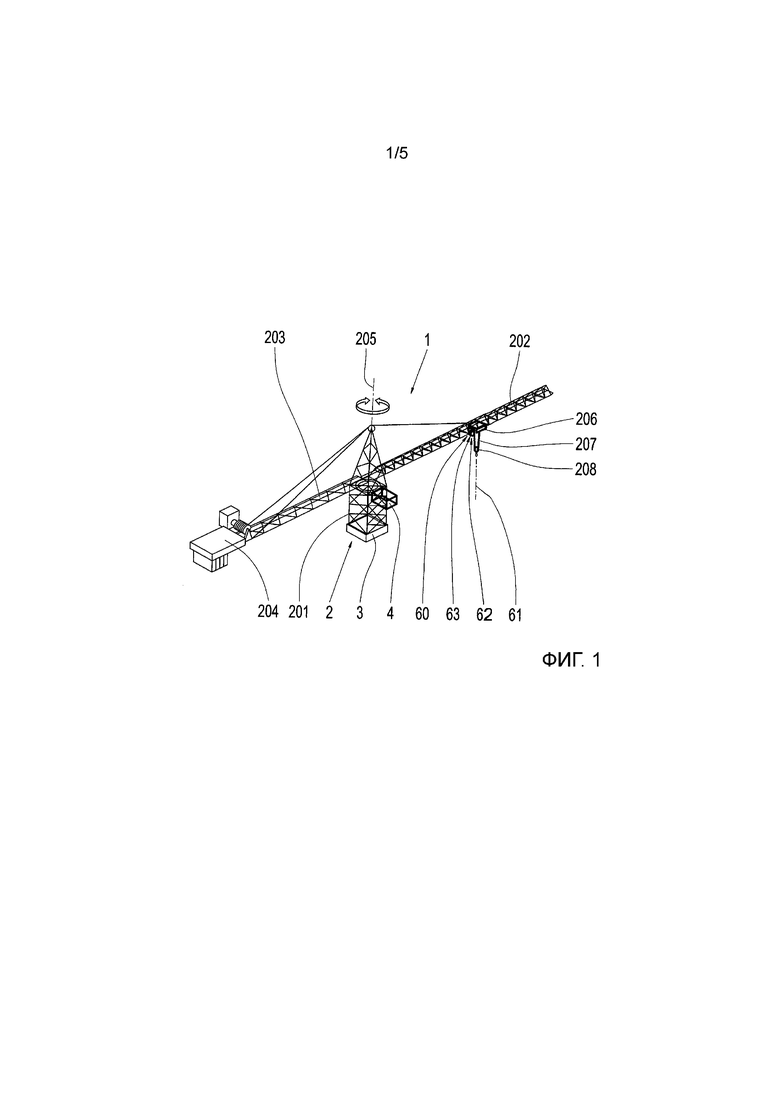
фиг. 1 - схематичное изображение строительной машины в виде башенного поворотного крана, грузовой крюк которого образует функциональный элемент строительной машины;
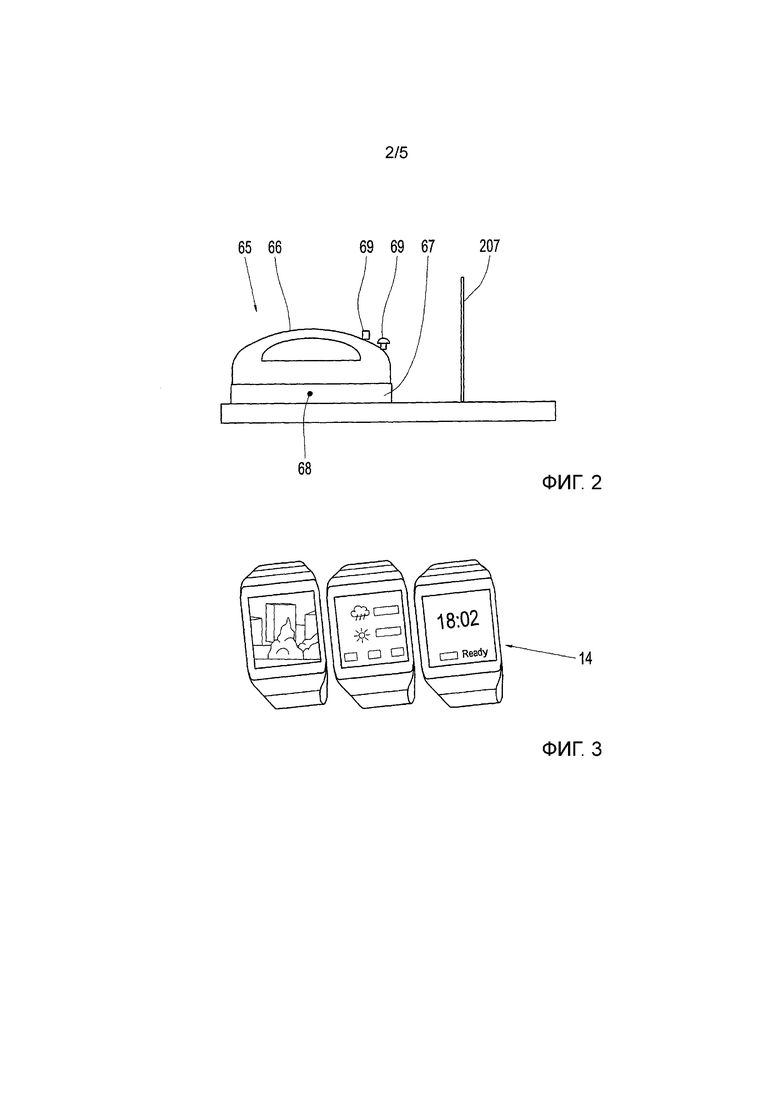
фиг. 2 - схематичное изображение модуля управления перемещением, который может присоединяться к направляемому грузовому крюку крана с фиг. 1 или к установленному на нем конструктивному элементу;
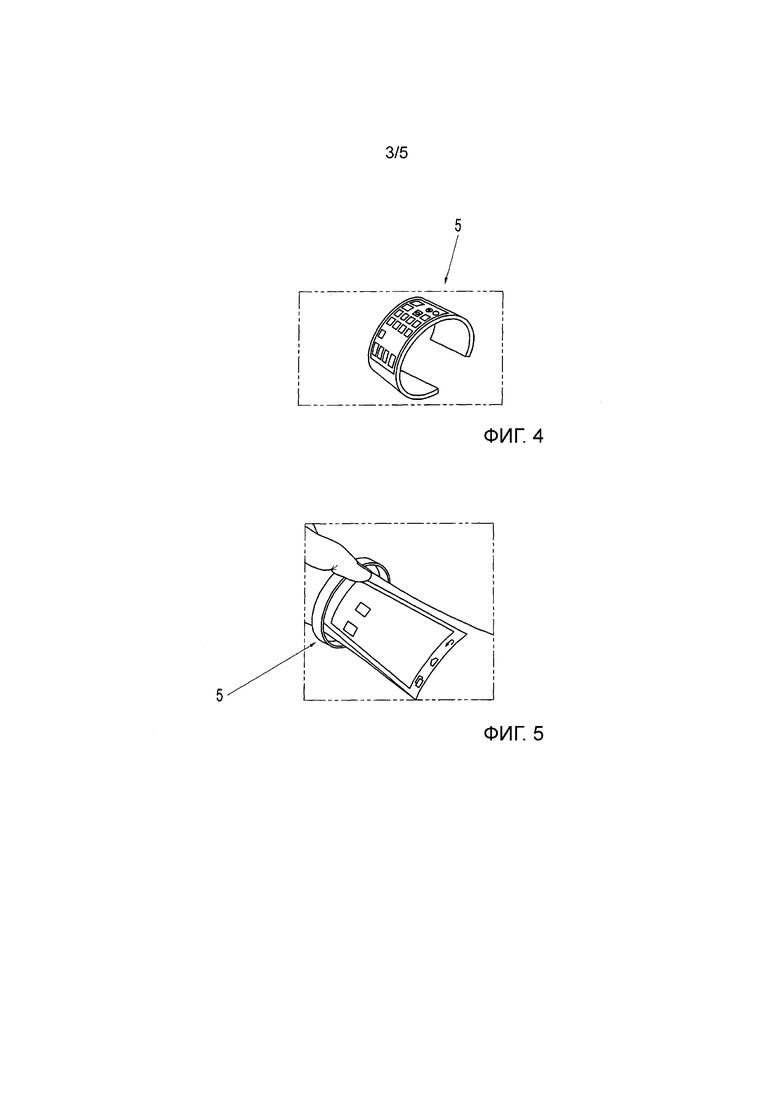
фиг. 3 - схематичное изображение связанного с устройством управления крана мобильного электронного компонента в виде умных часов;
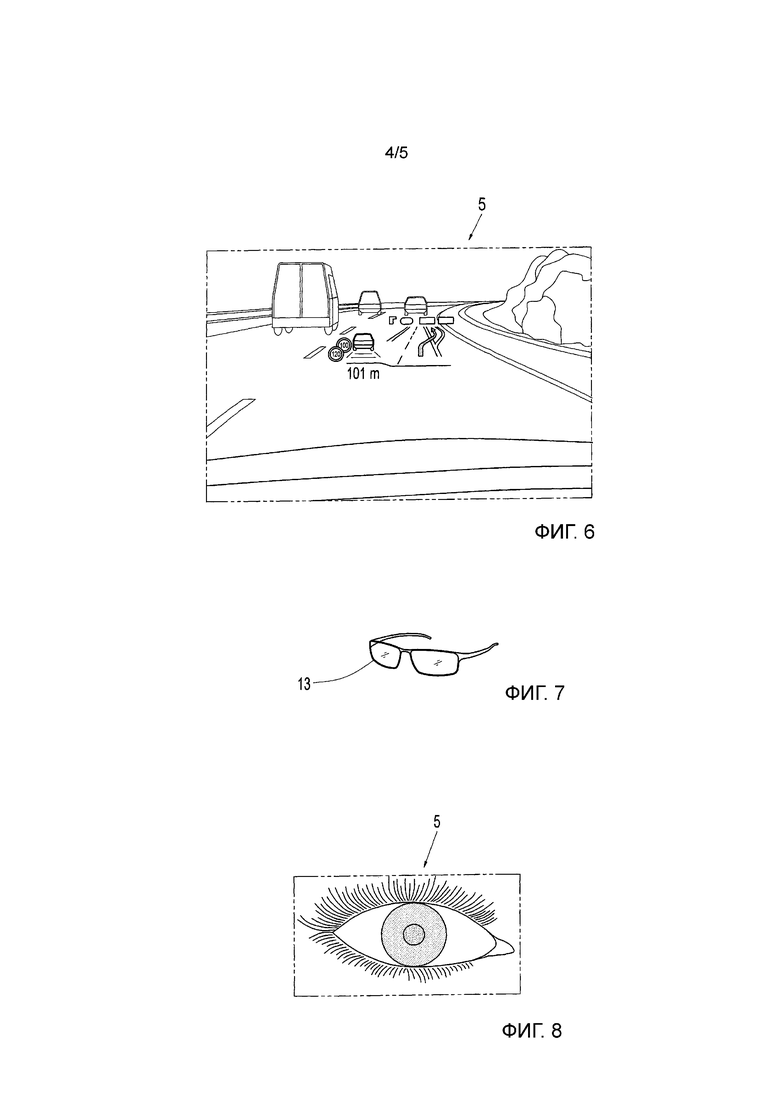
фиг. 4 - схематичное изображение связанного с устройством управления крана мобильного электронного компонента в виде размещаемого на запястье планшета;
фиг. 5 - схематичное изображение связанного с устройством управления крана мобильного электронного компонента в виде проекционного браслета, который может проецировать изображение на предплечье;
фиг. 6 - схематичное изображение связанного с устройством управления крана мобильного электронного компонента в виде проекционного дисплея;
фиг. 7 - схематичное изображение связанного с устройством управления крана мобильного электронного компонента в виде умных очков;
фиг. 8 - схематичное изображение связанного с устройством управления крана мобильного электронного компонента в виде выполненной в виде проекционного дисплея контактной линзы;
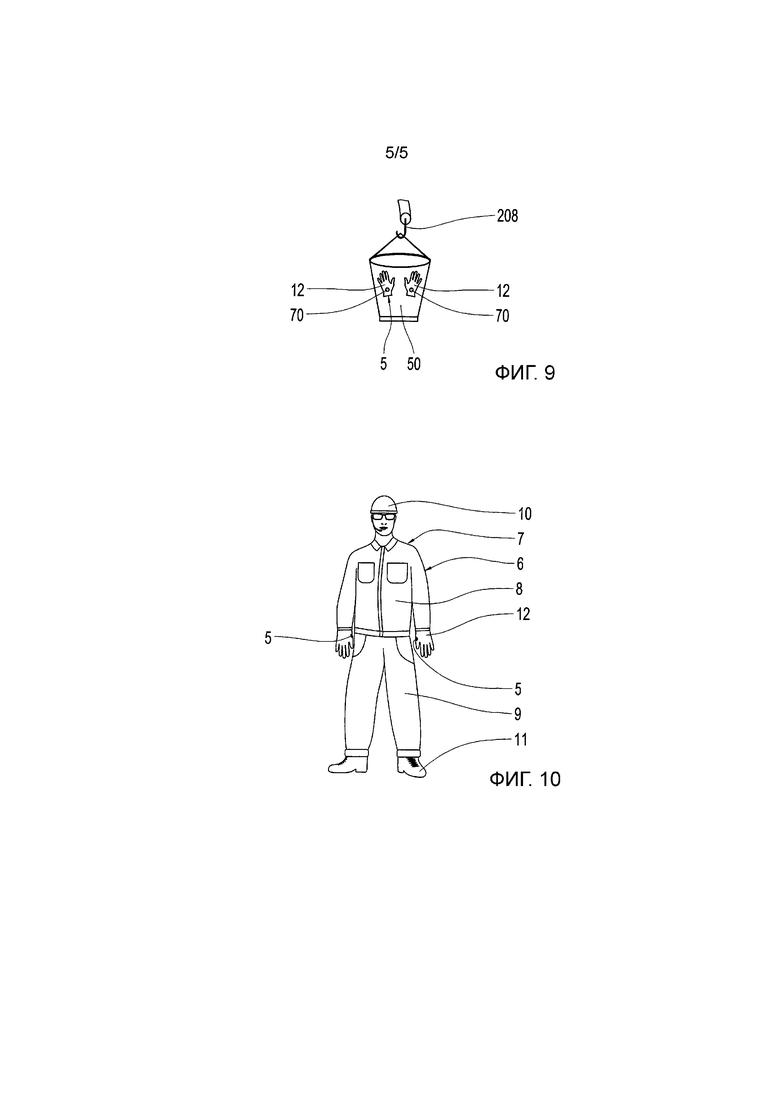
фиг. 9 - схематичное изображение ручного направления установленного на грузовом крюке крана с фиг. 1 ковша для бетонирования перчатками, в которые интегрированы датчики; и
фиг. 10 - схематичное изображение различных электронных компонентов в виде носимых компонентов, при помощи которых различные опции крана с фиг. 1 могут управляться и/или контролироваться.
Как показывает фиг. 1, строительная машина 2 может быть выполнена в виде крана, например башенного поворотного крана, крана с телескопической стрелой, портового крана или морского крана. Показанный на фиг. 1 башенный поворотный кран может иметь, например, по существу известным образом башню 201, которая удерживает стрелу 202 крана, которая уравновешивается противовесной стрелой 203, на которой предусмотрен противовес 204. Указанная стрела 202 крана может вместе с противовесной стрелой 203 поворачиваться механизмом поворота вокруг вертикальной оси 205 поворота, которая может быть коаксиальной к оси башни. По стреле 202 крана может при помощи привода тележки перемещаться крановая ходовая тележка 206, причем из крановой тележки 206 выходит подъемный трос 207, на котором закреплен грузовой крюк 208.
Как также показывает фиг. 1, строительная машина 2 может иметь при этом электронное устройство 3 управления, которое может включать в себя, например, расположенное на самой строительной машине управляющее вычислительное устройство. Указанное устройство 3 управления может управлять при этом различными исполнительными органами, гидравлическими системами, электродвигателями, приводными устройствами и другими рабочими агрегатами на соответствующей строительной машине. Ими могут быть, например, у показанного крана его подъемный механизм, его механизм поворота, его привод крановой тележки, его - имеющийся при необходимости - привод изменения вылета стрелы крана или тому подобное.
Указанное электронное устройство 3 управления может при этом сообщаться с терминалом 4, который может быть расположен на посте управления или в кабине оператора и может иметь, например, форму планшета с сенсорным экраном и/или джойстика, так что с одной стороны различные данные могут отображаться устройством 3 управления на терминале 4, а с другой стороны команды управления могут вводиться через терминал 4 в устройство 3 управления.
Указанное устройство 3 управления крана 1 может быть выполнено в частности для того, чтобы управлять указанными приводными устройствами подъемного механизма, крановой тележки и механизма поворота также в том случае, если грузовой крюк 208 и/или установленный на нем конструктивный элемент, как например показанный на фиг. 9 ковш 50 для бетонирования, манипулируется оператором машины вручную, то есть нажимается или тянется и/или поворачивается им вручную в некотором направлении или это пробуется, для того чтобы, например, при бетонировании делать возможной ручную тонкую настройку положения грузового крюка и тем самым ковша для бетонирования.
Для этого кран 1 может иметь устройство 60 регистрации, которое регистрирует наклонную тягу подъемного троса 207 и/или отклонения грузового крюка 208 относительно вертикали 61, которая проходит через точку подвеса грузового крюка 208, то есть через крановую тележку 206.
Предусмотренные для этого средства 62 определения устройства 60 регистрации могут работать, например, оптически, для того чтобы определять указанное отклонение. В частности на крановой тележке 206 может быть смонтирована камера 63 или другая дающая изображение сенсорная техника, которая смотрит от крановой тележки 206 вертикально вниз, так что при неотклоненном грузовом крюке 208 его графическое отображение находится в центре предоставленного камерой 63 изображения. Если все же грузовой крюк 208 отклоняется относительно вертикали 61, например благодаря ручному нажатию или тяговому усилию на грузовом крюке 208 или показанном на фиг. 9 ковше 50 для бетонирования, графическое отображение грузового крюка 208 смещается из центра изображения с камеры, что может определяться устройством 64 оценки изображения.
В зависимости от зарегистрированного отклонения относительно вертикали 61, в частности учитывая направление и величину отклонения, устройство 3 управления может управлять приводом механизма поворота и приводом крановой тележки, для того чтобы снова приводить крановую тележку 206 в более-менее точное положение над грузовым крюком 208, то есть устройство 3 управления управляет приводными устройствами крана 1 таким образом, что наклонная тяга или зарегистрированное отклонение максимально компенсируется. Вследствие этого может достигаться интуитивное, простое управление и тонкая настройка положения грузового крюка и установленного на нем груза.
Альтернативно или дополнительно указанное устройство 60 регистрации может включать в себя также модуль 65 управления перемещением, который может быть выполнен мобильным и с возможностью присоединения к грузовому крюку 208 и/или установленному на нем грузу. Как показывает фиг. 2, такой модуль 65 управления перемещением может включать в себя, например, рукоятку 66, которая при помощи подходящих средств 67 фиксации может предпочтительно разъемно закрепляться на грузозахватном средстве 208 и/или установленном на нем конструктивном элементе, как например ковше 50 для бетонирования с фиг. 9. Указанные средства 67 фиксации могут включать в себя, например, магнитные держатели, вакуумные присоски, стопорные фиксаторы, фиксаторы с байонетным затвором или тому подобное.
С указанной рукояткой 66 могут быть согласованы датчики 68 усилия и/или момента и при необходимости при возможном подвижном расположении или исполнении рукоятки 66 также датчики движения, при помощи которых оказанные на рукоятку 66 усилия и/или моменты и/или движения могут регистрироваться. Согласованная с рукояткой 66 сенсорная техника выполнена при этом предпочтительно таким образом, что усилия и/или моменты и/или движения могут регистрироваться в отношении своего направления действия и/или величины по модулю.
На основе оказанных на рукоятке 66 манипуляционных усилий и/или моментов и/или движений, которые регистрируются устройством 60 регистрации, устройство 3 управления может управлять приводными устройствами крана 1 таким образом, что зарегистрированные ручные манипуляции преобразовываются в моторизованные установочные движения крана, как это было более подробно разъяснено ранее.
Альтернативно или дополнительно к указанной рукоятке 66 модуль 65 управления перемещением может включать в себя также другие органы 69 управления, например наклоняемый и/или поворачиваемый джойстик, сенсорный экран, на котором регистрируются скользящие движения и/или нажатие отображенных символов движения, таких как стрелки и тому подобное, и/или ползунковые переключатели и/или нажимные кнопки и/или качающиеся рычаги и тому подобное. Как было разъяснено вначале, оси приведения в действие, по меньшей мере, одного органа 69 управления связаны с осями движения крана 1, для того чтобы делать возможным интуитивное управление краном, например таким образом, что направленные вверх ручные управляющие движения перемещают крюк крана вверх, направленные влево манипуляционные действия перемещают крюк крана влево и т.д.
Если модуль 65 управления перемещением разъемно присоединен к крюку 208 крана и/или установленному на нам конструктивному элементу, то посредством выполнения средств присоединения или указанных средств 67 фиксации и/или посредством задания положения присоединения, например соответствующими метками, может обеспечиваться, что модуль 65 управления перемещением присоединяется в правильной ориентации.
Для того чтобы была возможность регулировать и/или контролировать, по меньшей мере, один рабочий параметр, указанное устройство 3 управления может включать в себя далее мобильные электронные компоненты 5 в виде так называемых "носимых" компонентов, которые интегрированы в функциональные части или части надеваемой одежды или части 6 одежды, которые согласно назначению носятся на теле и удерживаются согласно назначению на теле самостоятельно без активного захвата или уравновешивания. Указанные функциональные части могут быть при этом предметом 7 одежды, как например курткой 8 или брюками 9, которые адаптированы к форме тела и благодаря своей адаптации к форме тела носятся с самоудержанием на теле, см. фиг. 10. Известным по существу образом могут при этом использоваться вспомогательные средства, такие как ремни, подтяжки, застежки-молнии и тому подобное.
Альтернативно или дополнительно части одежды, в которые интегрирован электронный компонент 5, могут также включать в себя головной убор 10, как например налобную повязку, кепку или каску, и/или также обувь 11, при необходимости также в виде сапог, и/или перчатки 12.
Как показывает фиг. 9, могут например такие перчатки 12 с интегрированными в них электронными компонентами 5 применяться для того, чтобы аналогичным образом, как было описано ранее, направлять или тонко юстировать положение грузового крюка 208 крана 1 или закрепленного на нем ковша 50 для бетонирования. Такие перчатки 12 могут включать в себя например чувствительные к давлению и/или направлению датчики 70, которые могут быть интегрированы в подушечки или кончики пальцев и/или ладонь соответствующей перчатки 12.
Если перчатками 12 касаются поверхностей перемещаемого конструктивного элемента и/или грузозахватного средства, то указанными датчиками 70 может регистрироваться, в каком направлении перчатки 12 нажимают, тянут или поворачивают конструктивный элемент или грузозахватное средство, для того чтобы затем выполнять при помощи устройства 3 управления крана 1 соответствующие движения перемещения. При этом, например, на перемещаемом конструктивном элементе могут быть размещены метки положения, которые определяют положение касания или захвата для перчаток 12, так что устройство 3 управления - из ориентации конструктивного элемента на крюке 208 крана - знает, в каком направлении работают перчатки 12 и их датчики 70.
Альтернативно или дополнительно с различными датчиками 70 перчаток 12 могут быть также согласованы различные функции, например в том отношении, что с датчиком ладони правой перчатки согласована функция "горизонтальное перемещение справа налево", в то время как с датчиком ладони левой перчатки согласована функция "вертикальное перемещение". Для того чтобы была возможность управлять перемещением, перпендикулярным к плоскости касания - то есть перпендикулярным к плоскости чертежа фиг. 9 -, например, датчик пальца левой перчатки может сигнализировать о движении к оператору, а датчик пальца правой перчатки о движении от оператора. Другие назначения датчиков естественно возможны.
Альтернативно или дополнительно перчатки 12 могут также иметь датчики ускорения и/или гироскопические элементы, при помощи которых могут регистрироваться движения кистей рук и их направление. Вследствие этого могут создаваться условия для управления жестами, например в том отношении, что взмах перчаткой верх преобразовывается в поднятие грузового крюка.
Для того чтобы реализовывать такое управление жестами, указанное устройство 60 регистрации может также иметь камеру или дающую изображение сенсорную технику или другое оптическое устройство регистрации, при помощи которого могут регистрироваться движения кистей рук или движения других частей тела оператора машины в частности в непосредственной близости от грузового крюка 208. Такая камера может быть расположена в разных местах, например на башне 201 и/или на стреле 202 крана и/или на грузовом крюке 208 и/или на беспилотном летательном аппарате (дроне) и/или на вышеуказанном модуле 65 управления перемещением, который может присоединяться к направляемому конструктивному элементу. Обработка изображения может оценивать зарегистрированные движения оператора машины, из чего устройство 3 управления может отдавать затем крану 1 команды перемещения. Устройство оценки изображения может быть выполнено при этом в частности таким образом, что могут регистрироваться или определяться прописанные в DIN 33409 знаки руками на предоставленном камерой изображении. Такими определенными в указанном германском промышленном стандарте (DIN) знаками руками являются, например, поднятие правой руки для обозначения того, что в дальнейшем даются знаки руками, или разведение обеих рук горизонтально в стороны, что интерпретируется как стоп-сигнал для остановки движений крана и/или окончания цикла движений, или легкие взмахи вверх и вниз ладони при вытянутом горизонтально предплечье, для того чтобы показывать начало медленного движения вниз.
Альтернативно или дополнительно к таким предметам одежды электронный компонент может быть также интегрирован в личный аксессуар, который носится согласно назначению на теле и может выполнять декоративную функцию и/или дальнейшие персональные дополнительные функции, такие как помощь зрительной функции и тому подобное. Как показывает фиг. 3 или 7, таким личным аксессуаром могут быть умные очки 13, часы 14, кольцо на пальце, браслет или ремень и тому подобное, в которые или который интегрирован электронный компонент 5 для управления и/или контроля за строительной машиной 2.
При этом фиг. 3 показывает часы 14 в виде умных часов, которые имеют дисплей, на котором могут отображаться различные данные, касающиеся эксплуатации строительной машины. При необходимости указанные умные часы могут также иметь сенсорный экран, при помощи которого команды управления могут вводиться в устройство управления строительной машины.
Как показывает фиг. 4, мобильный электронный компонент 5 может быть также планшетом, который при помощи устройства фиксации наподобие браслета или ремешка может закрепляться на запястье, и при этом сам может также иметь изогнутый дисплей, который, однако, может работать в остальном наподобие обычного планшета, то есть также при помощи функции сенсорного экрана может генерировать команды управления.
Фиг. 5 показывает мобильный электронный компонент 5 в виде проекционного браслета, который может проецировать изображение на предплечье. Также здесь может быть предусмотрена функция регистрации, которая может регистрировать подушечку пальца или тому подобное в области проецируемого изображения, для того чтобы вводить команды управления.
Как показывает фиг. 6, например, умные очки 13, которые изображены на фиг. 7, могут также работать наподобие проекционного дисплея, при котором на прозрачную смотровую панель или стекло или корпус из прозрачного пластика могут выводить дополнительные данные, вследствие чего может создаваться насыщенная реальность согласно технологии дополненной реальности.
Как показывает фиг. 8, такой мобильный электронный компонент 5, который выполнен и работает в виде проекционного дисплея, может быть также выполнен в виде контактной линзы.
Как было разъяснено ранее, указанные электронные компоненты 5 могут быть при этом согласованы с различными рабочими параметрами и/или функциями управления строительной машины 2, так что на различных частях тела могут контролироваться и/или регулироваться различные рабочие параметры. Например, электронным компонентом 5 в правой перчатке 12 может управляться и/или контролироваться подъемный механизм крана, в то время как, например, электронным компонентом 5 в левой перчатке может управляться или контролироваться крановая тележка крана 2.
Предпочтительно выполненные мобильными и/или в виде носимых элементов электронные компоненты 5 могут сообщаться с соответствующей строительной машиной 2 беспроводным образом. Это может осуществляться, например, через Bluetooth, причем в этом случае устройство 3 управления на строительной машине 2 может иметь Bluetooth-адаптер 7, например на блочной обойме грузового крюка, через который соответствующий электронный компонент 5 может связываться с устройством 3 управления. Аналогичным образом соответствующий электронный компонент 5 также включает в себя приемно-передающее Bluetooth-устройство.
Передача данных между электронными компонентами 5 и управляющим вычислительным устройством 3 строительной машины 2 является при этом предпочтительно двунаправленной, так что и контролируемые рабочие параметры могут отображаться на электронном компоненте 5, и команды управления могут вводиться через электронный компонент 5.
Электронные компоненты 5 могут при этом иметь выполненные вышеописанным образом средства ввода для ввода команд управления и средства отображения для отображения управляющих данных и/или контролируемых рабочих параметров, что также описано выше.
Предложен кран с электронным устройством управления, приводным устройством для перемещения грузозахватного средства. При этом предусмотрено устройство регистрации выполненных вручную манипуляционных усилий и/или движений, которые оказываются на грузозахватное средство и/или выполняются на функциональном элементе. Причем устройство управления выполнено для того, чтобы управлять приводным устройством в зависимости от зарегистрированного манипуляционного усилия и/или движения. Достигается простое в обращении управление и контролирование машины, что в минимальной степени отвлекает оператора машины от других обязанностей, таких как наблюдение за функциональным элементом. 23 з.п. ф-лы, 10 ил.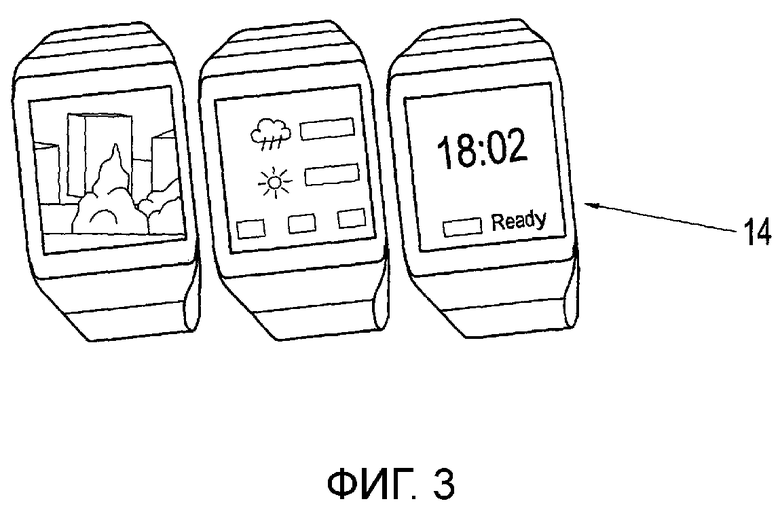
1. Строительная машина, в частности кран, с электронным устройством (3) управления для управления и/или регистрации рабочих параметров, а также, по меньшей мере, с одним приводным устройством для перемещения функционального элемента, в частности грузозахватного средства (208),
отличающаяся тем, что предусмотрено устройство (60) регистрации для регистрации выполненных вручную манипуляционных усилий и/или движений, которые оказываются на функциональный элемент и/или выполняются на функциональном элементе, причем устройство (3) управления выполнено для того, чтобы управлять, по меньшей мере, одним приводным устройством в зависимости от зарегистрированного манипуляционного усилия и/или движения.
2. Строительная машина по п.1, причем функциональный элемент подвешен с возможностью качания, в частности является закрепленным на подъемном тросе (207) грузозахватным средством (208) крана или черпаком башенного экскаватора, причем устройство (60) регистрации имеет средства (62) определения для определения отклонения подвешенного с возможностью качания функционального элемента относительно вертикали (61) через точку подвеса, и устройство (3) управления выполнено для того, чтобы управлять, по меньшей мере, одним приводным устройством в зависимости от зарегистрированного отклонения, в частности таким образом, что зарегистрированное отклонение компенсируется.
3. Строительная машина по п.2, причем средства (62) определения представляют собой датчик изображения, в частности камеру (63), ось взгляда которого/которой проходит через точку подвеса вертикально вниз, а также предусмотрено устройство оценки изображения для определения наклонной тяги и/или отклонения функционального элемента относительно вертикали (61) через точку подвеса.
4. Строительная машина по любому из пп.1-3, причем устройство (60) регистрации имеет модуль (65) управления перемещением, который может позиционироваться на функциональном элементе строительной машины и/или на установленном на нем, перемещаемом конструктивном элементе и который имеет, по меньшей мере, один орган (69) управления для ввода команд управления, в зависимости от которых функциональный элемент может перемещаться устройством управления.
5. Строительная машина по п.4, причем ось приведения в действие указанного, по меньшей мере, одного органа (69) управления совпадает с осью перемещения функционального элемента строительной машины.
6. Строительная машина по п.4 или 5, причем орган управления модуля (65) управления перемещением имеет, по меньшей мере, один датчик силы и/или момента и/или пути для регистрации силы и/или момента и/или установочного хода рукоятки (66) модуля (65) управления перемещением.
7. Строительная машина по любому из пп.4-6, причем модуль (65) управления перемещением имеет в качестве органа (69) управления наклоняемый и/или поворачиваемый джойстик.
8. Строительная машина по любому из пп.1-7, причем устройство (60) регистрации имеет устройство регистрации жестов для регистрации жестов и генерирования команд управления в зависимости от зарегистрированных жестов, причем указанное устройство регистрации жестов включает в себя предпочтительно датчик изображения, в частности камеру, и нижестоящее устройство оценки изображения.
9. Строительная машина по любому из пп.1-8, причем устройство (60) регистрации имеет устройство распознавания речи для распознавания голосовых команд управления, причем устройство (3) управления выполнено для того, чтобы зарегистрированные голосовые команды преобразовывать в команды управления для указанного, по меньшей мере, одного приводного устройства.
10. Строительная машина по любому из пп.1-9, причем устройство (60) регистрации имеет оптическое средство регистрации для регистрации лазерной световой точки, которая может испускаться лазерным указателем и маркирует конечную точку для перемещения функционального элемента, причем устройство (3) управления выполнено для того, чтобы управлять упомянутым, по меньшей мере, одним приводным устройством в зависимости от зарегистрированной лазерной световой точки.
11. Строительная машина по любому из пп.1-10, причем устройство (3) управления включает в себя, по меньшей мере, один мобильный электронный компонент (5), который содержит, по меньшей мере, один датчик ускорения, причем устройство (3) управления выполнено для того, чтобы управлять упомянутым, по меньшей мере, одним приводным устройством в зависимости от зарегистрированного датчиком ускорения ускорения мобильного электронного компонента (5), причем указанный мобильный электронный компонент (5) выполнен с возможностью ношения предпочтительно в руке и/или на части тела.
12. Строительная машина по любому из пп.1-11, причем устройство (3) управления имеет мобильный электронный компонент (5) для отображения и/или ввода управляющих данных, который интегрирован в носимую согласно назначению на теле оператора машины часть (6) надеваемой одежды, которая может надеваться на часть тела с самоудержанием.
13. Строительная машина по п.12, причем мобильный электронный компонент (5) интегрирован, в частности воткан и/или вшит, в предмет одежды, в частности в перчатку (12), и/или образует твердый составной элемент упомянутого предмета одежды.
14. Строительная машина по любому из пп.1-13, причем средства ввода упомянутого, по меньшей мере, одного электронного компонента (5) имеют встроенный в предмет одежды пьезоэлемент.
15. Строительная машина по любому из пп.1-14, причем средства ввода упомянутого, по меньшей мере, одного электронного компонента (5) включают в себя датчик ускорения и/или пространственного угла и выполнены для того, чтобы генерировать команды управления в зависимости от определенных ускорений и/или пространственных ориентаций, в частности посредством определенного ускорения в определенной пространственной ориентации согласно управлению жестами.
16. Строительная машина по п.15, причем средства ввода упомянутого, по меньшей мере, одного электронного компонента (5) включают в себя модуль поднятия/опускания для генерирования команды управления для поднятия функционального элемента, в частности крюка крана, при регистрации направленного вверх движения датчика ускорения и/или ориентации, которое достигает и/или превышает заданное ускорение и/или скорость, и для генерирования команды управления для опускания функционального элемента при регистрации направленного вниз движения, которое достигает и/или превышает заданное ускорение и/или скорость.
17. Строительная машина по любому из пп.1-16, причем согласованные с различными рабочими параметрами и/или различными функциями управления электронные компоненты (5) интегрированы в различные функциональные части (6) и/или различные участки функциональной части (6), которые согласно назначению могут надеваться на различные части тела оператора машины, так что на первой части тела может контролироваться и/или управляться первый рабочий параметр и/или первая функция управления, а на второй части тела может контролироваться и/или управляться второй рабочий параметр и/или вторая функция управления.
18. Строительная машина по любому из пп.1-17, причем упомянутый, по меньшей мере, один электронный компонент (5) интегрирован в умные очки (13).
19. Строительная машина по любому из пп.1-18, причем упомянутый, по меньшей мере, один электронный компонент (5) интегрирован в наручные часы (14).
20. Строительная машина по любому из пп.1-19, причем упомянутый, по меньшей мере, один электронный компонент (5) интегрирован в проекционный браслет.
21. Строительная машина по любому из пп.1-20, причем упомянутый, по меньшей мере, один электронный компонент (5) интегрирован в планшет, который при помощи браслета и/или ремешка может носиться на запястье.
22. Строительная машина по любому из пп.1-21, причем упомянутый по меньшей мере, один электронный компонент (5) включает в себя проекционный дисплей.
23. Строительная машина по п.22, причем проекционный дисплей согласован с умными очками (13) и/или контактной линзой.
24. Строительная машина по любому из пп.1-23, причем упомянутый, по меньшей мере, один электронный компонент (5) имеет средства отображения для отображения управляющих данных и/или рабочих параметров, причем средства отображения включают в себя оптическое устройство отображения и/или акустическое устройство отображения и/или вибрационное устройство отображения, в частности интегрированный в предмет одежды пьезоэлемент.
| DE 102007012575 A1, 18.09.2008 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Изложница с суживающимся книзу сечением и с вертикально перемещающимся днищем | 1924 |
|
SU2012A1 |

