Настоящее изобретение касается способа и устройства для поднятия груза, при этом по меньшей мере один летающий дрон несет по меньшей мере одну часть этого груза.
В последнее время задумывались о том, чтобы поднимать грузы посредством летающих дронов и таким образом иметь возможность более гибко выполнять задачи по подъему, которые классическим образом выполняются кранами, чтобы уменьшить или совсем устранить ограничения и затраты труда при работе с краном.
Например, в области стройплощадок есть разные задачи по подъему, специально для которых надо доставлять, возводить, снова демонтировать и снова увозить кран. Например, это могут быть отдельные подъемы для переноса определенных частей постройки или строительных инструментов в определенную область сооружаемой или перестраиваемой постройки. Когда на стройплощадке для других целей кран не нужен, кран должен возводиться специально для этого. Даже когда на стройплощадке уже применяется кран, могут иметь место такие особые подъемы, для которых необходим другой кран, например, для сооружения стационарного постоянного строительного крана.
До сих пор в области стройплощадок и других зон применения крана, как, например, у контейнерных кранов или портовых кранов, летающие дроны применялись в первую очередь для второстепенных вспомогательных функций, в частности, чтобы осуществлять полет камер или аналогичных контрольных устройств для получения изображений в нужные положения, чтобы контролировать работу с краном, соответственно, процесс подъема, который выполняется краном. В частности, изображение, предоставленное установленной на дроне камерой, может отображаться на экране, чтобы давать машинисту крана другой угол взгляда на крановый крюк.
Однако, когда дрон задействуется в поднятии груза, управление дроном подвергается другим влияниям и заметно труднее, соответственно, сложнее. В частности, со стороны груза, с которым соединен дрон, на дрон действуют значительные силы, которые не только статически тянут в вертикальном направлении, но и имеют горизонтальные компоненты и, например, могут варьироваться вследствие порывов ветра. К тому же качательные движения и вместе с тем динамические силы груза могут быстро приводить летающий дрон в нежелательные положения или приводить в движения.
Исходя из этого, в основе настоящего изобретения лежит задача, создать улучшенный способ и улучшенное устройство для поднятия грузов посредством летающего дрона, которые устранят недостатки уровня техники и усовершенствуют последний предпочтительным образом. В частности, должно достигаться простое управление летающим дроном даже под влиянием соединенного с дроном груза.
В соответствии с изобретением названная задача решается с помощью способа по п.1 формулы изобретения, а также устройства по п.12 формулы изобретения. Предпочтительные варианты осуществления изобретения являются предметом зависимых пунктов формулы изобретения.
Итак, предлагается для поднятия груза сопрягать несколько летающих дронов, соответственно, по меньшей мере один летающий дрон с грузовым крюком крана и предусмотреть одно общее управление для этих нескольких дронов, соответственно, указанного по меньшей мере одного дрона и грузового крюка крана, чтобы не надо было, так сказать, несколькими руками с помощью отдельных средств управления одновременно управлять несколькими дронами, соответственно, наряду с крюком крана, еще и дроном. Груз распределяется на несколько дронов или по меньшей мере один дрон и крановый грузовой крюк. Дополнительно к указанному по меньшей мере одному летающему дрону, который несет по меньшей мере часть груза, в соответствии с изобретением предусмотрено, что груз соединяется с другим летающим дроном и/или грузовым крюком крана, а также частично совместно переносится и/или направляется другим летающим дроном, соответственно, крановым грузовым крюком, причем эти оба летающих дрона друг с другом и/или указанный по меньшей мере один летающий дрон вместе с краном активируются согласованным друг с другом образом одним общим устройством управления для управления движениями полета и/или крана. Если, например, устройство управления приводится в действие для передвижения кранового грузового крюка, одновременно генерируются также согласованные с этим управляющие сигналы для летающего дрона, чтобы также соответственно осуществлять полет дрона. Аналогичным образом тогда, когда устройство управления приводится в действие для осуществления полета дрона, автоматически генерируется согласованный с этим управляющий сигнал для движения соответствующим образом других летающих дронов, соответственно, крановых грузовых крюков.
Если краном, например, в виде башенного поворотного крана, мобильного телескопического крана или портового крана, поднимается груз, один или несколько летающих дронов одновременно с крановым крюком могут присоединяться к поднимаемому грузу или же непосредственно соединяться с крановым крюком, чтобы разным образом помогать при поднятии груза. Например, поднимаемый груз может облегчаться для крана, например, чтобы можно было поднимать груз, превышающий несущую способность, соответственно, грузоподъемность самого крана, так чтобы производитель работ на стройплощадке смог обойтись без установки крана большего размера для этой задачи по подъему. То есть летающий дрон может выполнять чисто функцию поднятия и вместе с краном поднимать груз.
Однако альтернативно или дополнительно в сочетании с краном летающий дрон может также использоваться для того, чтобы направлять груз и действовать на присоединенный к грузовому крюку груз с силой, которая содержит горизонтальную компоненту. Если, например, длинномерные грузы, такие как стальные балки или тому подобное, поднимаются в горизонтальной ориентации, внецентренно присоединенный к длинномерному грузу летающий дрон может предотвращать, соответственно, намеренно вызывать поворот длинномерного груза и, например, служить для того, чтобы длинномерный груз мог подниматься крановой стрелой приблизительно в вертикальной плоскости и/или мог опускаться в месте назначения в определенной ориентации относительно этой плоскости.
Альтернативно или дополнительно горизонтальные силы, действующие со стороны летающего дрона на груз или грузовой крюк, при соответствующем управлении летающим дроном могут использоваться для того, чтобы предотвращать и/или гасить качательные движения груза, соответственно, грузового крюка относительно крановой стрелы. В частности, управление дроном может осуществляться так, чтобы он действовал на грузовой крюк и/или подвешенный к нему груз с противодействующими качательному движению горизонтальными силами.
Альтернативно или дополнительно к этому горизонтальные силы могут также действовать со стороны летающего дрона на груз или грузовой крюк, чтобы по меньшей мере частично компенсировать силы ветра и/или минимизировать отклонение от вертикали подъемного каната вследствие сил ветра, действующих на висящий на грузовом крюке груз.
Чтобы выполнять названные функции подъема и направления, может быть достаточно соединить летающий дрон с грузовым крюком крана или закрепленным на нем грузом. Однако альтернативно с грузом или с грузовым крюком могут также соединяться несколько летающих дронов, при этом, например, может быть предпочтительно разместить по меньшей мере пару летающих дронов на противоположных сторонах грузового крюка и соединить с грузом, соответственно, самим грузовым крюком, чтобы можно было передавать на грузовой крюк, соответственно, подвешенный к нему груз, соответственно, можно было взаимно компенсировать горизонтальные силы в приблизительно противоположных друг другу направлениях, когда, например, требуется только подъемная способность летающих дронов.
Наряду с названным присоединением по меньшей мере одного дрона к крану, для определенных задач по подъему может быть также предпочтительно, только сопрячь несколько летающих дронов и поднимать соответствующий груз с помощью нескольких летающих дронов, однако без крана, соответственно, его грузового крюка. Благодаря этому может, например, увеличиваться досягаемость для задачи по подъему, которая ограничена у крана его вылетом. Поднятие груза только с помощью летающих дронов может быть также полезно при возведении крана, чтобы, например, поднимать определенные конструктивные элементы крана при монтаже крана.
Если сопрягаются несколько летающих дронов и без крана применяются для поднятия груза, общее управление может удерживать эти оба дрона на расстоянии друг от друга и осуществлять их совместный полет по определенной траектории полета к цели назначения. При этом летающие дроны могут, например, посредством отдельных подъемных канатов крепиться к общему грузу, или же крепиться к общей подъемной скобе, к которой, в свою очередь, прикреплен груз.
Чтобы для тяжелых при работе на стройплощадке грузов можно было создавать с помощью летающих дронов достаточные подъемные и тяговые силы, но одновременно также обеспечивать возможность достаточно быстрого реагирования этих дронов на управляющие команды и вместе с тем чувствительного управления подъемной и тяговой силой и/или траекторией полета дрона, в предпочтительном усовершенствовании изобретения летающий дрон может иметь гидростатическую трансмиссию для привода по меньшей мере одного ротора (несущий винт) летающего дрона, причем такая гидростатическая трансмиссия может включать в себя работающий в качестве насоса, соединяемый с приводным двигателем гидростат, а также один или несколько гидростатов, который, соответственно, которые могут работать в качестве двигателя и могут соединяться каждый с одним ротором, чтобы осуществлять его привод и снабжаться от работающего в качестве насоса гидростата. С помощью такой гидростатической трансмиссии может очень быстро варьироваться создаваемый на роторе вращающий момент и/или его частота вращения, при этом варьируются одна или несколько гидростатических регулируемых величин, таких как, например, рабочий объем одного или нескольких гидростатов и/или угол перестановки одного или нескольких выполненных с возможностью перестановки гидростатов и/или действующее в гидростатической системе давление и/или расход. Причем возможность такой быстрой перестановки вращающего момента и/или частоты вращения имеется даже тогда, когда на высоком уровне производительности осуществляется работа с большими вращающими моментами и/или высокими частотами вращения для подъема тяжелых грузов.
Если применяются летающие дроны, имеющие несколько роторов, например, в виде так называемых мультикоптеров, такая гидростатическая приводная система обеспечивает возможность названной чувствительной, быстрой управляемости вращающего момента и/или частоты вращения индивидуально для каждого ротора. В частности, могут быть предусмотрены несколько гидростатов, которые соединены каждая с одним из роторов, чтобы осуществлять привод каждого ротора, так что путем перестановки каждого гидростата, что может осуществляться индивидуально, может индивидуально переставляться частота вращения и/или вращающий момент каждого ротора.
Предпочтительно приводной двигатель, который приводится работающим в качестве насоса гидростатом, может быть выполнен в виде двигателя внутреннего сгорания, например, в виде дизельного двигателя. С помощью такого двигателя внутреннего сгорания даже на протяжении продолжительных сроков эксплуатации может создаваться достаточно высокая мощность, чтобы реализовывать несущие способности летающих дронов, достаточные для поднятия больших грузов.
При этом может быть предпочтительно эксплуатировать названный двигатель внутреннего сгорания по меньшей мере приблизительно в стационарном рабочем состоянии, в частности, по существу при полной нагрузке, по меньшей мере в то время, когда выполняется задача по подъему. Управление подъемной и/или тяговой силой и/или траекторией полета дрона может осуществляться путем перестановки какой–либо гидростатической регулируемой величины гидростатической передачи, соответственно, гидростатической трансмиссии, в частности также исключительно путем перестановки одной или нескольких гидростатических регулируемых величин.
В предпочтительном усовершенствовании изобретения такой летающий дрон, имеющий гидростатическую трансмиссию, может работать вместе с наземной станцией снабжения, которая может связываться с летающим дроном. В частности, такая станция снабжения на земле может включать в себя агрегат для охлаждения и/или фильтрации, который может соединяться с гидростатическим контуром снабжения гидростатической трансмиссии и охлаждать и/или фильтровать гидравлическую жидкость гидростатической трансмиссии летающих дронов.
Альтернативно или дополнительно названная станция снабжения может также включать в себя источник давления, который может соединяться с гидростатической трансмиссией летающего дрона и может предварительно создавать давление в гидростатической трансмиссии, в частности создавать и/или настраивать желаемое там номинальное рабочее давление.
Чтобы простым образом адаптировать управление летающего дрона к крану, соответственно, к другим летающим дронам и упростить обслуживание для машиниста, вышеназванное общее устройство управления может иметь главный блок управления, имеющий средства ввода, с которого на базе введенных пожеланий к движению генерируются и передаются по меньшей мере одному летающему дрону и/или крану управляющие сигналы, а также дополнительный блок управления, с которого генерируются и передаются управляющие команды для по меньшей мере одного другого летающего дрона в зависимости от движений полета или крана, которые были назначены главным блоком управления. Названный дополнительный блок управления может быть присоединен к главному блоку управления и выполнен для того, чтобы в зависимости от генерируемых главным блоком управления управляющих сигналов автоматически генерировать адаптированные к ним управляющие сигналы для дополнительно применяемого летающего дрона.
Например, названный дополнительный блок управления может включать в себя модуль управления следованием, посредством которого управление дополнительным летающим дроном осуществляется так, что он автоматически следует движениям крана и/или движениям полета главного летающего дрона, без необходимости специального ввода для этого машинистом пожеланий к движению для дополнительного летающего дрона.
Предпочтительно названный дополнительный блок управления может быть при этом выполнен так, чтобы дополнительный летающий дрон не только мог сохранять желательное относительное положение относительно крана или названного главного дрона, но и чтобы названное относительное положение также было варьируемым образом задаваемым и изменяемым, например, также таким образом, чтобы названное относительное положение непрерывно изменялось во время процесса подъема. Например, дополнительный блок управления может задавать для дополнительного летающего дрона определенный путь относительно крана, по которому летающий дрон осуществляет полет во время процесса подъема, соответственно, в зависимости от положения грузового крюка. Если, например, длинномерная балка примерно в горизонтальной ориентации поднимается из сначала параллельного стреле исходного положения, и эта длинномерная балка должна опускаться крановой стрелой в месте назначения в повернутой относительно него, например, приблизительно перпендикулярной к вертикальной плоскости ориентации, дополнительный блок управления может определять для дрона путь полета, который может иметь свою исходную точку, например, примерно перпендикулярно под крановой стрелой и затем, чтобы во время движения подъема грузового крюка поворачивать длинномерную балку относительно крановой стрелы, распространяться винтообразно вокруг перпендикуляра, проведенного через тележку крана.
Чтобы обеспечить возможность простого обслуживания летающего дрона, в усовершенствовании изобретения летающий дрон может также активироваться в зависимости от положения крана и/или грузового крюка или положения другого летающего дрона таким образом, чтобы летающий дрон автоматически следовал движениям крана или грузового крюка и/или движениям ведущего летающего дрона и по меньшей мере приблизительно сохранял, соответственно, пытался сохранять и воспроизводил желаемое положение относительно крана и/или его грузового крюка и/или относительно ведущего летающего дрона даже при движениях крана, в частности движениях грузового крюка, и/или движениях ведущего летающего дрона. Если летающий дрон применяется, например, в сочетании с краном, дрон может при активированном режиме автоматического следования автоматически следовать грузовому крюку крана. Если, например, желательно и настраивается относительное положение летающего дрона примерно на высоте грузового крюка, соответственно, несколько выше него на боковом расстоянии от вертикальной средней плоскости крана, проходящей через стрелу, летающий дрон может автоматически снижать или повышать высоту своего полета, когда опускается или поднимается грузовой крюк, и/или лететь вперед или назад параллельно вертикальной средней плоскости крана, когда передвигается тележка крана, и/или лететь в сторону поперек влево или вправо, когда поворачивается кран.
Однако, предпочтительно управление летающим дроном может также осуществляться автономно таким образом, чтобы дрон мог свободно прилетать в разные желаемые положения относительно крана и/или относительно ведущего летающего дрона. Это может осуществляться, например, путем ввода желаемого положения для летающего дрона относительно грузового крюка, например, таким образом, чтобы в модуле управления положением, который может быть предусмотрен в кабине крановщика или на пульте оператора или пульте дистанционного управления, вводилось положение по отношению к грузовому крюку, например, в виде «2 м выше в сторону справа от грузового крюка». Однако альтернативно или дополнительно полет дрона относительно крана или ведущего летающего дрона может также осуществляться совершенно свободно, например, с помощью джойстика, чтобы осуществлять полет дрона до тех пор, пока не будет достигнуто желаемое относительное положение. Тогда в автоматическом режиме общее устройство управления может автоматически сохранять или пытаться сохранять относительное положение полета или и следовать возможным движениям подъема грузового крюка или ведущего летающего дрона.
Чтобы можно было позиционировать летающий дрон относительно кранового грузового крюка, соответственно, относительно ведущего летающего дрона и автоматически воспроизводить его/их движения, управление положением летающего дрона может осуществляться в относительной, неподвижной относительно крана и неподвижной относительно ведущего летающего дрона системе координат. Для этого может быть предусмотрено устройство для определения положения, которое непрерывно или циклически определяет положение полета дрона относительно крана и/или ведущего дрона, причем такое устройство для определения положения может, например, иметь устройство для локализации сигналов, которое может осуществлять локацию приходящих от дрона и/или посылаемых дрону сигналов и/или оценивать с точки зрения определенных свойств сигналов, чтобы определять из них относительное положение дрона к грузовому крюку, соответственно, к ведущему дрону.
Такое устройство для локализации сигналов может быть реализовано, например, таким образом, чтобы на кране, соответственно, ведущем дроне устанавливались несколько приемно–передающих блоков, которые поддерживают связь с приемно–передающим блоком на дроне, так чтобы из периодов прохождения сигнала и/или интенсивностей сигнала и/или направлений сигнала в смысле линий связи между разными приемно–передающими блоками крана, соответственно, машины и приемно–передающим блоком летающего дрона могло определяться их положение относительно крана, соответственно, ведущего дрона.
Названные приемно–передающие блоки могут представлять собой, например, транспондеры или приемно–передающие блоки ближнего поля. В случае крана названные приемно–передающие блоки могут быть установлены, например, на стреле, на тележке, на башне и/или на самом грузовом крюке. В частности, могут определяться периоды прохождения сигнала от данного приемно–передающего блока на кране, соответственно, машине до дрона и/или обратно от дрона к приемно–передающему блоку машины и/или регистрироваться интенсивности сигнала и/или определяться направления, в которых возникают максимальные интенсивности сигнала, чтобы из периодов прохождения сигнала и/или интенсивностей сигнала и/или направлений сигнала максимальной интенсивности сигнала определять положение дрона относительно крана.
Альтернативно или дополнительно к такому определению относительного положения в неподвижной относительно машины системе координат могут также определяться положения дрона, с одной стороны, и крана, в частности грузового крюка, соответственно, ведущего дрона, с другой стороны, соответственно в абсолютной системе координат, так что из этих двух абсолютных положений, в свою очередь, может определяться относительное положение, и вышеописанным образом дрон может, например, активироваться так, чтобы дрон автоматически следовал, соответственно, пытался следовать грузовому крюку, соответственно, ведущему дрону и его/их движениям.
Названное определение абсолютного положения может осуществляться, например, посредством локационной системы, например, системы GPS. Например, летающий дрон, с одной стороны, и грузовой крюк, с другой стороны, может быть оснащен соответственно блоком GPS, чтобы, с одной стороны, определять абсолютное пространственное положение грузового крюка, а с другой стороны, абсолютное пространственное положение дрона. Но пространственное положение грузового крюка может также приблизительно определяться из известных данных движения и/или положения компонентов рабочей машины, таких как, например, угол поворота башенного поворотного крана, положение тележки и высота грузового крюка, из которых при известном месте установки по меньшей мере приблизительно, в частности при пренебрежении качательными движениями и/или влияниями ветра, могут определяться положения грузового крюка.
В предпочтительном усовершенствовании изобретения управление положением дрона может также осуществляться в зависимости от ограничений рабочей области и/или данных модели стройплощадки и/или данных регистрации препятствий, которые могут получаться на самом дроне. Если дрон, например, эксплуатируется в вышеописанном режиме автоматического следования, в котором дрон автоматически следует грузовому крюку крана, могло бы, например, случиться, что при повороте крана вокруг его вертикальной оси башни дрон будет осуществлять совместный полет в сторону поперек, чтобы сохранять положение относительно грузового крюка, и при этом придет в столкновение с частью здания, хотя сам грузовой крюк еще не достигнет этой части здания. Чтобы предотвратить это, устройство управления положением дрона может учитывать ограничения рабочей области и/или данные модели стройплощадки и/или даже иметь распознавание препятствий, например, посредством радарного или ультразвукового сенсора, чтобы иметь возможность распознавать препятствия. Тогда автоматическое управление следованием может отменяться, и режим автоматического следования аннулироваться, когда достигается ограничение рабочей области и/или какая–либо часть здания из набора данных модели стройплощадки или какое–либо препятствие. Предпочтительно дрон может тогда также автоматически рассчитывать альтернативный маршрут, который учитывает ограничение рабочей области и/или обходит препятствие, причем этот обходной маршрут предпочтительно определяется таким образом, что грузовой крюк, соответственно, рабочий инструмент остается в поле зрения сенсорики дрона, создающей изображения.
Альтернативно или дополнительно к названному управлению положением общее устройство управления может также включать в себя модуль управления подъемной и/или тяговой силой, посредством которого управление определенными рабочими параметрами дрона, такими как, например, частота вращения и/или угол установки ротора, может осуществляться так, чтобы грузозахватное средство на дроне, например, подъемный канат, который соединяет дрон с грузом или грузовым крюком, повергалось воздействию желаемой силы, в частности имеющей определенную величину силы и/или определенное направление силы. Например, напряжение натяжения и/или наклон подъемного каната, который соединяет дрон с грузом, относительно горизонтали может контролироваться с помощью надлежащей сенсорики и в зависимости от этого активироваться дрон, чтобы посредством дрона тянуть груз в определенном направлении с определенной интенсивностью, соответственно, силой.
Ниже изобретение поясняется подробнее на одном из предпочтительных примеров осуществления и соответствующих чертежах. На чертежах показано:
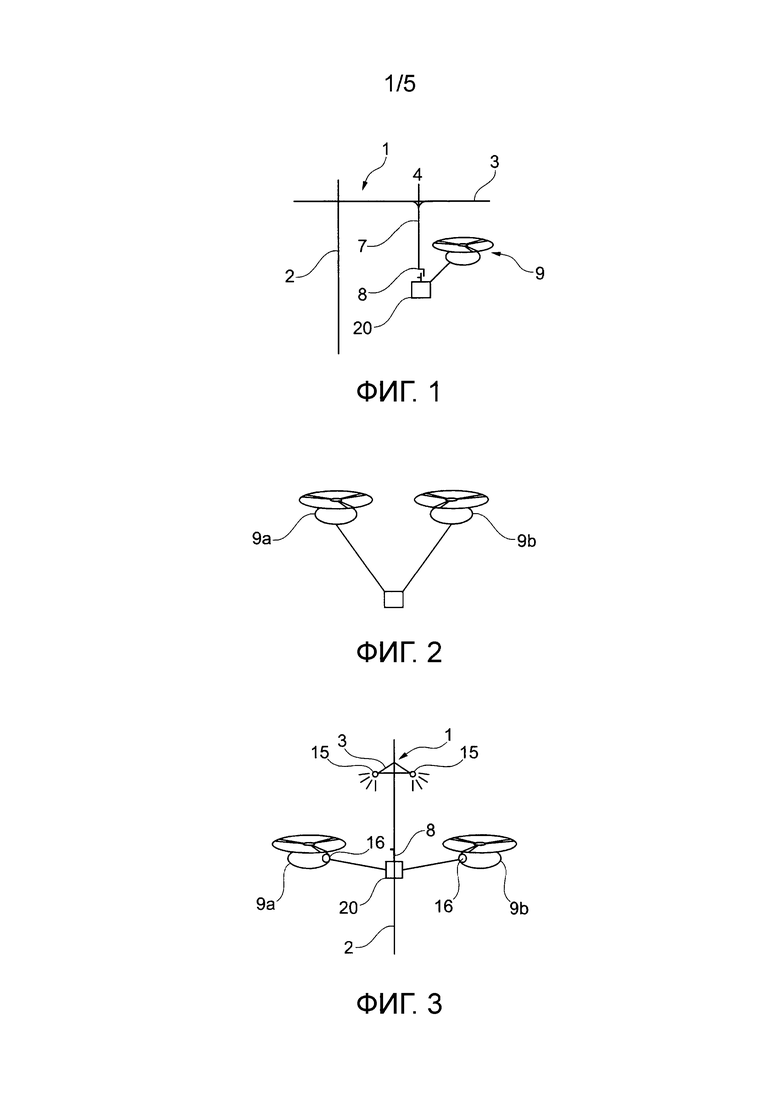
фиг.1: схематичный вид сбоку крана в виде башенного поворотного крана с навешенным на грузовой крюк грузом, а также дополнительным, соединенным с грузом летающим дроном;
фиг.2: схематичное изображение двух сопряженных, соединенных с одним общим грузом летающих дронов;
фиг.3: вид спереди крана с фиг.1 в направлении взгляда параллельно продольной оси стрелы, при этом изображены два размещенных на двух противоположных сторонах грузового крюка летающего дрона, которые соединены с навешенным на грузовой крюк грузом;
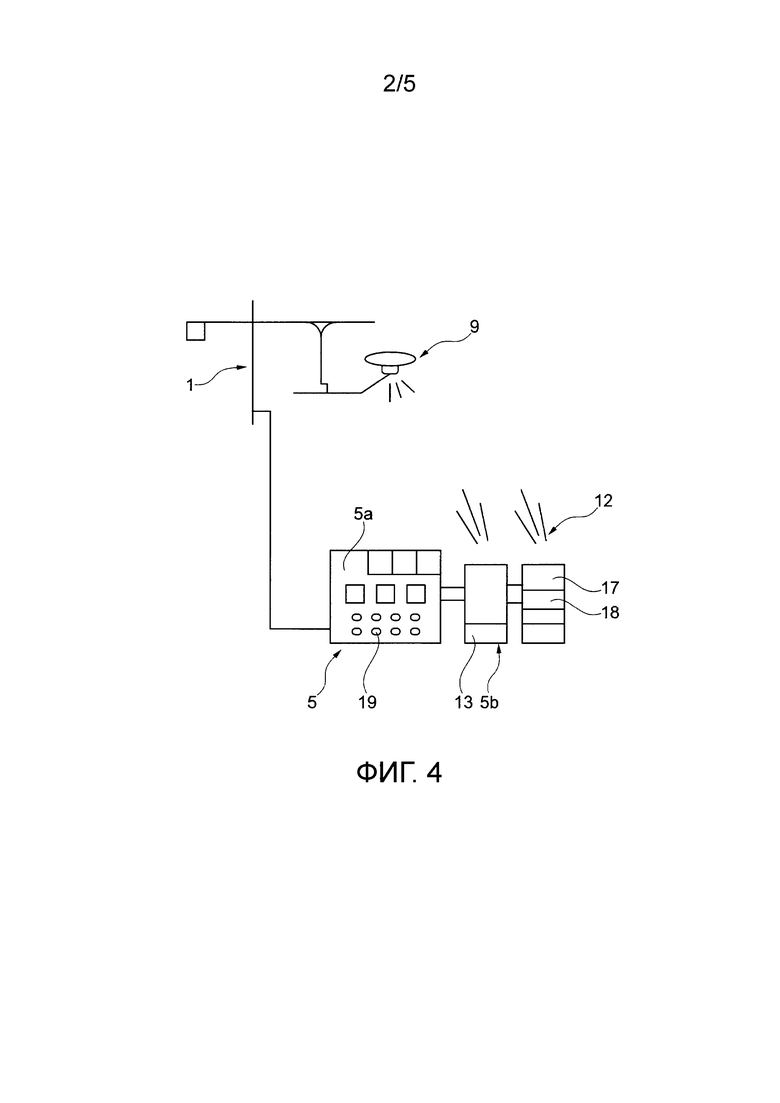
фиг.4: схематичное изображение общего устройства управления для управления краном и дополнительными летающими дронами для совместного поднятия груза, и
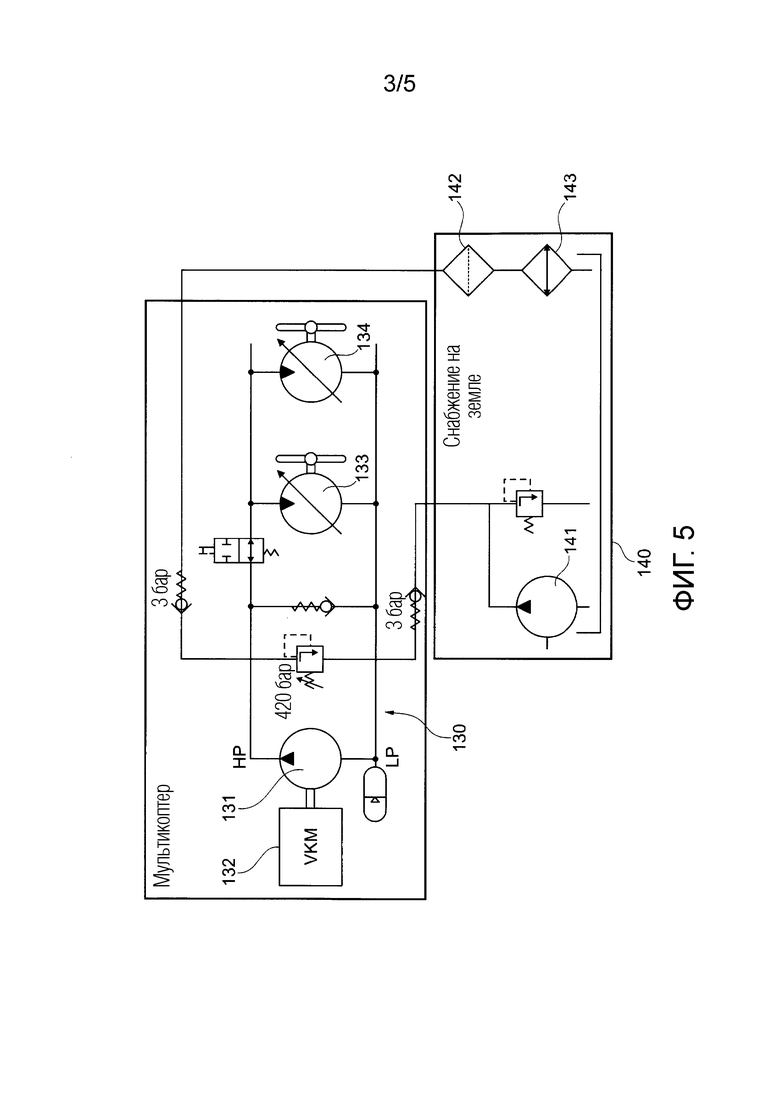
фиг.5: схематичное изображение гидравлической трансмиссии летающего дрона по одному из предпочтительных вариантов осуществления изобретения, при этом изображена также станция снабжения, к которой может присоединяться летающий дрон, имеющий гидростатическую трансмиссию, посредством которой в гидростатической трансмиссии может предварительно создаваться давление, осуществляться ее охлаждение и фильтрация;
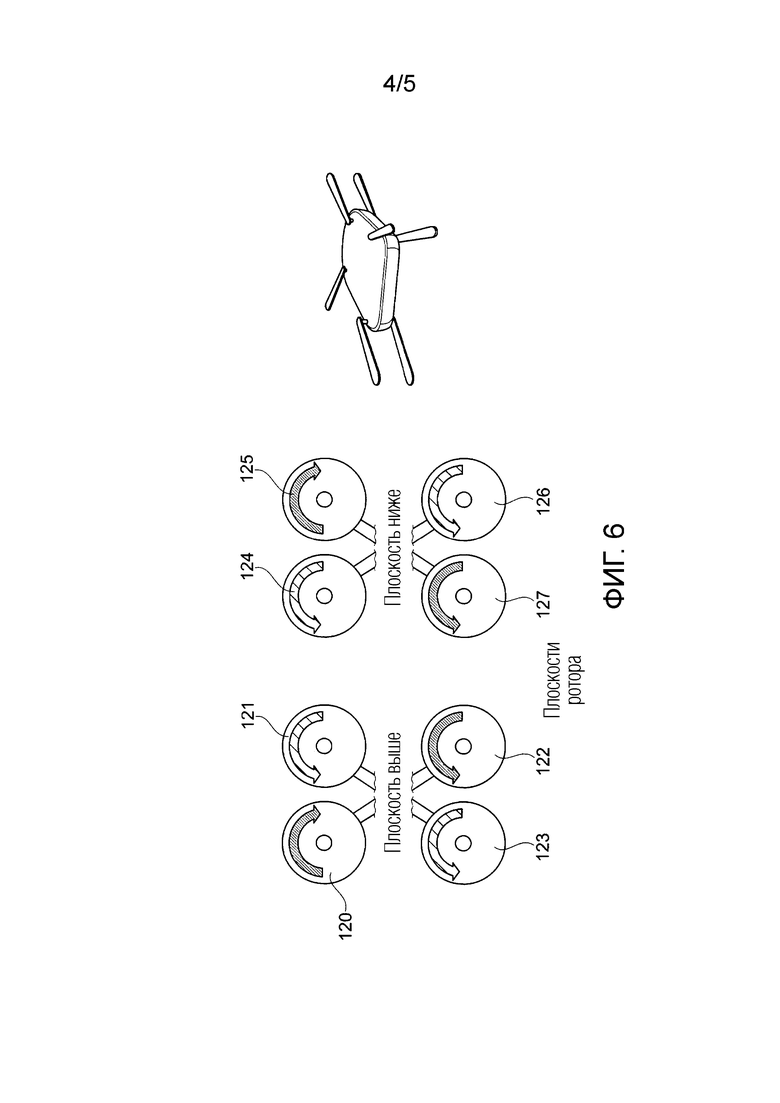
фиг.6: схематичное изображение распределенных на два уровня роторов летающего дрона в общем количестве восьми, которые реализуют различные направления вращения на разных уровнях и на одном уровне в разные стороны, и
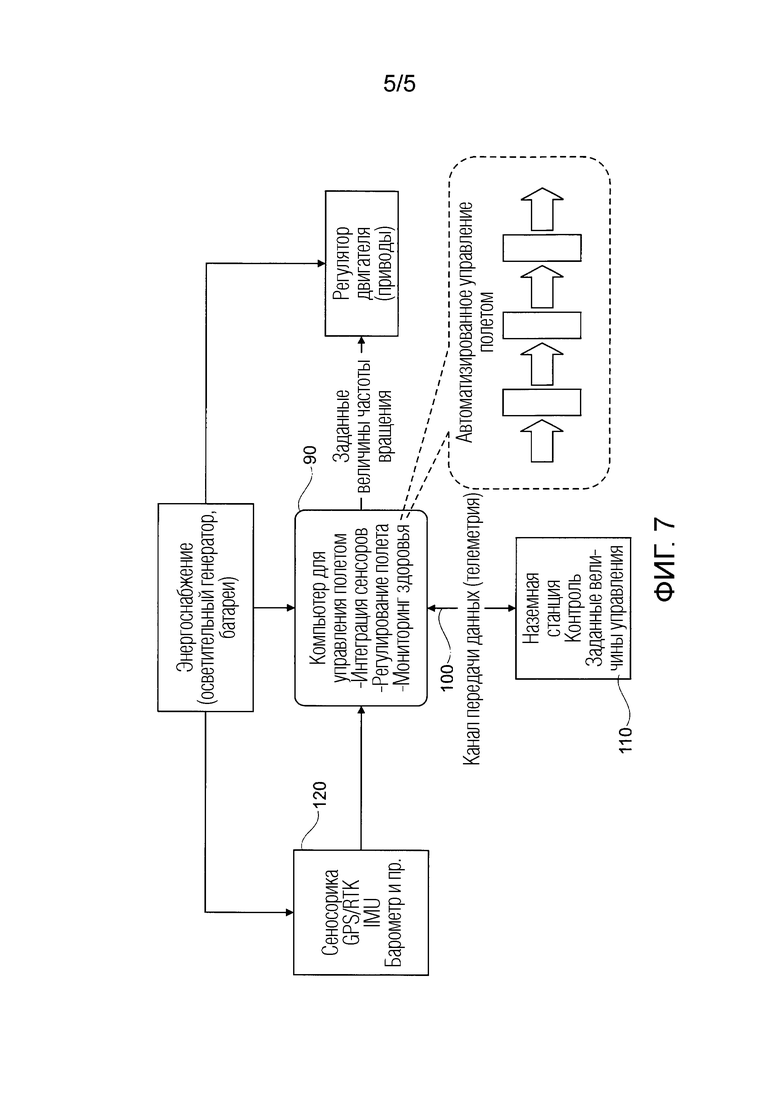
фиг.7: схематичное изображение иерархии управления для управления летающим дроном.
Как показано на фиг.1, кран 1 может быть выполнен в виде башенного поворотного крана, башня 2 которого имеет стрелу 3, на которой с возможностью передвижения установлена тележка 4. Стрела 3 может вместе с башней 2 или же без башни 2, в зависимости от исполнения крана в виде крана с верхней или нижней поворотной частью, поворачиваться вокруг вертикальной оси, для чего предусмотрен привод механизма поворота. Стрела 3 могла бы быть выполнена при необходимости также с возможностью качания вверх и вниз вокруг лежащей поперечной оси, при этом мог бы быть предусмотрен надлежащий привод качания, например, в комбинации с расчалкой стрелы. Названная тележка 4 может передвигаться посредством лебедки для перемещения тележки или другого привода тележки.
Названные приводные устройства могут активироваться устройством 5 управления, которое может включать в себя стационарный блок обслуживания, имеющий надлежащие средства 19 ввода, например, в виде джойстиков в кабине 6 крановщика, соответственно, на пульте управления крана или пульте дистанционного управления, и/или же может также иметь мобильный блок обслуживания, имеющий соответствующие средства ввода. Такой мобильный блок обслуживания может быть выполнен, например, в виде беспроводного дистанционного управления, которое крановщик может носить с собой, когда он ходит по стройплощадке в области работы крана, чтобы также иметь возможность управлять краном вне кабины 6 крановщика.
Чтобы можно было манипулировать грузовым крюком 8, который может быть соединен с обводящим тележку 4 подъемным канатом 7, или захваченным им грузом 20 в комбинации с грузовым крюком 8, в соответствии с изобретением предусмотрен по меньшей мере один летающий дрон 9, который соединяется с грузом 20 и/или с грузовым крюком 8 тяговым и/или толкающим средством, в частности подъемным канатом или толкающей штангой.
Чтобы дополнительно к манипулированию грузом давать лучший обзор задачи манипуляции, на дроне может быть смонтирована по меньшей мере одна камера, посредством которой может создаваться камерное изображение грузового крюка 8 и/или окружения грузового крюка. Названное камерное изображение предпочтительно представляет собой живое или полученное в режиме реального времени изображение в смысле теле– или видеоизображения и передается от камеры 10 летающего дрона 9 беспроводным путем к блоку отображения и/или устройству 5 управления крана 1, при этом названный блок отображения может представлять собой, например, дисплей машиниста в виде табло или экрана или монитора, который может быть смонтирован в кабине 6 крановщика. Если вышеназванным образом пульт дистанционного управления или мобильный блок обслуживания применяется для управления краном 1, названный блок 11 отображения может быть предусмотрен в пульте дистанционного управления или на мобильном блоке обслуживания.
Летающий дрон 9 снабжен устройством 12 дистанционного управления, которое позволяет дистанционно управлять летающим дроном 9, в частности агрегатами для управления полетом, такими как, например, лопасти ротора (несущий винт), чтобы дистанционно управлять положением полета дрона 9.
Соответствующий модуль дистанционного управления предпочтительно интегрирован в устройство 5 управления и/или может быть предусмотрен в кабине 6 крановщика и/или пульте дистанционного управления или мобильном блоке обслуживания, например, быть оснащен соответствующими джойстиками.
Как показано н фиг.7, управление летающего дрона 9a; 9b может включать в себя компьютер 90 для управления полетом, который может быть предусмотрен на летающем дроне и, например, может включать в себя один или несколько микропроцессоров, одно или несколько программных запоминающих устройств и другие компоненты аппаратного и/или программного обеспечения, чтобы отрабатывать программу управления полетом. Как показано также на фиг.7, названный компьютер 90 для управления полетом по линии 100 связи, например, беспроводной связи, может поддерживать связь с наземной станцией 110, чтобы передавать данные от компьютера 90 для управления полетом к наземной станции 110 или, наоборот, от наземной станции 110 к компьютеру 90 для управления полетом. Например, от компьютера 90 для управления полетом к наземной станции 110 могут передаваться телеметрические данные, такие как положение GPS, частота вращения ротора, подъемная сила и другие параметры дрона, чтобы там контролироваться и/или оцениваться. Альтернативно или дополнительно от наземной станции 110 данные, такие как, например, управляющие сигналы, могут передаваться к компьютеру 90 для управления полетом, чтобы там влиять на управление дроном.
При этом упомянутый компьютер 90 для управления полетом с помощью предусмотренной на летающем дроне 9a; 9b сенсорики 120 может снабжаться сенсорными сигналами, которые указывают текущее рабочее состояние дрона и/или параметры движения, например, сигнал положения, такой как, например, положение GPS, давление воздуха, скорость ветра, данные компаса или тому подобное.
На основании сенсорных данных сенсорики 120 и/или на основании данных, полученных от наземной станции 110, компьютер 90 для управления полетом может осуществлять, соответственно, отрабатывать регулирование и/или управление полетом и активировать приводы дрона, в частности, чтобы варьировать частоту вращения и/или вращающий момент каждого ротора.
Как показано на фиг.6, летающий дрон 9a; 9b может иметь несколько роторов 120–127, которые могут быть расположены, например, лежа в двух плоскостях (уровнях) друг над другом, и в каждой плоскости крестообразно. При этом предпочтительно приводы роторов 120–126 и/или приводные передачи конфигурированы таким образом, что в одной плоскости противоположные роторы, то есть, например, 120 и 122, а также 121 и 123, соответственно вращаются в одинаковом направлении, а лежащие рядом друг с другом роторы вращаются в противоположных направлениях. При этом направления вращения в двух плоскостях роторов могут быть обратными, так что лежащая друг над другом/друг под другом пара роторов двух плоскостей роторов вращаются во встречном направлении.
У такого мультикоптера управление движением полета и/или создаваемой переносимой нагрузкой, соответственно, подъемной и/или тяговой нагрузкой может осуществляться целенаправленно путем распределения сдвига на роторах, в частности, когда частота вращения отдельных роторов 120–126 и/или их вращающий момент индивидуально, попарно или группами варьируется, чтобы вызвать подъем и/или опускание дрона 9a; 9b и/или пикирование и/или верчение и/или рыскание.
Как показано на фиг.5, летающий дрон 9a; 9b может при этом предпочтительно иметь гидравлическую трансмиссию 130 для осуществления привода роторов 120–127, причем эта гидравлическая трансмиссия 130, соответственно, гидростатическая передача может включать в себя работающий в качестве насоса гидростат 131, который может приводиться от приводного двигателя 132. Названный приводной двигатель 131 может быть предпочтительно выполнен в виде машины VKM внутреннего сгорания, например, в виде дизельного двигателя или бензинового двигателя или газового двигателя внутреннего сгорания.
Гидростатическая трансмиссия 130 включает в себя также предпочтительно несколько других гидростатов 133 и 134, которые имеют каждый приводную связь с одним из роторов 120–127 и могут снабжаться от гидростата 131, работающего в качестве насоса. При этом на фиг.5 показаны только два работающих в качестве двигателя гидростата 133 и 134. Однако, разумеется, что могут предусматриваться другие такие работающие в качестве двигателя гидростаты, чтобы можно было осуществлять привод каждого из отдельных роторов, которые имеет дрон 9a; 9b. Такие другие гидростаты могут быть, в частности по параллельной схеме, соединены с показанными гидростатами 133 и 134 питающими и обратными трубопроводами, которые подключены к гидростату 131, работающему в качестве насоса.
Предпочтительно названные гидростаты 131, 133 и 134 выполнены каждый в виде регулируемых гидростатов, рабочий объем, соответственно, перекачивающая мощность которых могут варьироваться. Например, могут находить применение наклоннодисковые агрегаты, которые выполнены с возможностью настройки угла регулировки (перестановки).
Чтобы управлять и/или регулировать вращающий момент и/или частоту вращения каждого ротора 120–127, можно, в частности, поступать следующим образом: предпочтительно приводной двигатель 132 может работать по меньшей мере приблизительно постоянно, например, при полной нагрузке или по меньшей мере приблизительно при полной нагрузке или в рабочей области, благоприятной с точки зрения коэффициента полезного действия. Приводимый в движение двигателем 132 внутреннего сгорания гидростат 132 преобразует вращательное приводное движение приводного двигателя 132 в гидравлическое давление, которое снабжает другие гидростаты 133, 134. Путем перестановки (регулировки) названных гидростатов 133 и 134 может варьироваться вращающий момент и/или частота вращения соединенных с ними приводом роторов. Но альтернативно или дополнительно в гидростатической трансмиссии могут находить применение и другие регулировочные звенья, чтобы управлять роторами, например, посредством клапанов управления давлением, дросселей массового потока и прочего.
Как показано также на фиг.5, предпочтительно летающий дрон 9a; 9b может соединяться со станцией 140 снабжения, которая может быть инсталлирована на земле или же в другом месте, например, на кране, чтобы осуществлять охлаждение и/или фильтрацию и/или предварительно создавать давление гидростатической трансмиссии. Как показано на фиг.5, станция 140 снабжения может иметь источник 141 давления, который может соединяться с гидростатической трансмиссией, например, через обратный клапан и/или запорный клапан, чтобы предварительно создавать в гидростатическом контуре давления давление, равное желаемому номинальному рабочему давлению.
Альтернативно или дополнительно станция снабжения может включать в себя устройство 142 фильтрации и/или устройство 143 охлаждения, которое/которые тоже может/могут соединяться с гидростатической трансмиссией, чтобы фильтровать и/или охлаждать гидравлическое масло, когда дрон соединен со станцией 140 снабжения.
Чтобы обеспечить возможность простого обслуживания, общее устройство 5 управления может иметь главное устройство 5a управления, имеющее средства 19 ввода для ввода пожеланий к полету или движению крана, с которого на базе введенных пожеланий к движению генерируются и передаются управляющие сигналы указанному по меньшей мере одному летающему дрону 9a и/или крану 1, и дополнительное устройство 5b управления, с которого генерируются и передаются управляющие команды для указанного по меньшей мере одного и/или других летающий дронов 9a; 9b в зависимости от движений полета или крана, которые были назначены главным устройством 5a управления.
Предпочтительно по меньшей мере в одном режиме автономного управления возможно практически автономное и независимое от крана управление положением летающего дрона 9 относительно крана 1 и/или его грузового крюка, например, собственно известным образом посредством названных джойстиков устройства 12 дистанционного управления. С помощью автономного модуля управления устройства 13 управления положением возможен подлет дрона 9 в желаемое положение относительно грузового крюка 8.
Дополнительно к такому автономному модулю управления положением все устройство 5 управления, соответственно, его дополнительное устройство 5b управления, в частности его устройство 13 управления положением может иметь автоматический модуль управления следованием, чтобы сохранять предопределенное положение дрона 9, например, произвольно принятое автономным модулем управления положением желаемое положение подлета и/или предопределенное, предварительно запрограммированное положение, даже когда кран 1 выполняет движения крана и/или грузовой крюк 8 движется, так что летающий дрон 9 практически автоматически следует за грузовым крюком 8 и сохраняет относительно него предопределенное относительное положение.
Предпочтительно предусмотрено устройство 18 для определения положения, которое автоматически непрерывно или циклически определяет положение дрона 9 относительно крана 1 и/или его грузового крюк 8, так что устройство 13 управления положением может управлять дроном 9 в зависимости от определенного относительного положения.
Для этого дрон 9 может, например, включать в себя блок 14 GPS, посредством которого абсолютное пространственное положение дрона 9 определяется и передается устройству 13 управления положением. С другой стороны, может определяться положение грузового крюка 8, так чтобы устройство 13 управления положением могло дистанционно управлять дроном 9, чтобы сохранять относительное положение.
При этом положение грузового крюка может, в принципе, тоже определяться с помощью GPS, например, когда в грузовой крюк интегрируется блок GPS. Однако альтернативно или дополнительно положение грузового крюка может также определяться из положения компонентов крана, в частности рассчитываться устройством 5 управления крана, например, когда регистрируются угол поворота стрелы, положение тележки 4 на стреле 3 и длина разматывания подъемного каната, откуда при известном месте установки крана 1 может по меньшей мере приблизительно определяться положение грузового крюка, если пренебречь динамическими качательными движениями или влияниями ветра.
Альтернативно или дополнительно к такому абсолютному определению положения может также определяться положение летающего дрона 9 относительно неподвижной относительно крана, т.е. вращающейся вместе с краном системы координат. Для этого на кране 1, например, на его стреле 3 и его башне 2, при необходимости также на его тележке 4 и/или его грузовом крюке 8 могут быть предусмотрены приемно–передающие блоки, например, в виде транспондерных блоков 15, которые предпочтительно установлены на кране 1 в нескольких находящихся на расстоянии друг от друга местах. Названные приемно–передающие блоки 15 могут поддерживать связь с соответствующим приемно–передающим блоком 16 на дроне 9. Например, тогда локационным устройством 17, которое может быть интегрировано в устройство 5 управления крана 1, из периодов прохождения сигнала между приемно–передающим блоком 16 на дроне 9 и соответствующими приемно–передающими блоками 15 на кране 1 могут определяться расстояния от дрона 9 до данных приемно–передающих блоков 16 на кране 1, а из него положение дрона 9 относительно крана 1.
Дополнительно к названному управлению положением общее устройство 5 управления может также включать в себя модуль управления подъемной и/или тяговой силой, посредством которого управление определенными рабочими параметрами летающего дрона 9a, соответственно, 9b, такими как, например, частота вращения и/или угол установки (угол атаки) ротора, может осуществляться так, чтобы грузозахватное средство на дроне, например, подъемный канат, который соединяет дрон с грузом 20 или грузовым крюком 8, подвергалось воздействию желаемой силы, в частности имеющей определенную величину силы и/или определенное направление силы.
Например, тяговое напряжение и/или наклон ϕ названного подъемного каната, который соединяет дрон с грузом 20, относительно горизонтали может контролироваться посредством надлежащей сенсорики, и в зависимости от этого активироваться дрон, чтобы тянуть груз 20 посредством дрона 9 в определенном направлении с определенной интенсивностью, соответственно, силой.
Как показано на фиг.3, с грузом 20 или грузовым крюком 8 могут также соединяться несколько летающих дронов 9a, 9b, при этом, например, может быть предпочтительно разместить по меньшей мере пару дронов 9a, b на противоположных сторонах грузового крюка 8 и соединить с грузом 20, соответственно, самим грузовым крюком 8, чтобы можно было передавать на грузовой крюк 8, соответственно, подвешенный к нему груз 20, соответственно, взаимно компенсировать горизонтальные силы FH в приблизительно противоположных друг другу направлениях, когда, например, требуется только подъемная способность дронов 9a, b.
Наряду с названным присоединением по меньшей мере одного летающего дрона 9 к крану 1, для определенных задач по подъему может быть также предпочтительно только сопрягать несколько летающих дронов 9a, 9b и поднимать соответствующий груз с помощью нескольких дронов, однако без крана, соответственно, его грузового крюка, как это, например, показано на фиг.2. Благодаря этому может, например, увеличиваться досягаемость (дальность действия) для задачи по подъему, которая ограничена у крана 1 его вылетом. Поднятие груза 20 только с помощью дронов может быть также полезно при возведении крана 1, чтобы, например, поднимать определенные конструктивные элементы крана при монтаже крана.
Если сопрягаются несколько летающих дронов 9a, b и без крана применяются для поднятия груза 20, общее устройство 5 управления может удерживать эти два дрона 9a и 9b на расстоянии друг от друга и осуществлять совместный полет по определенной траектории полета к цели назначения. При этом дроны 9a, b могут, например, посредством отдельных подъемных канатов крепиться к общему грузу, или же крепиться к общей подъемной скобе, к которой, в свою очередь, прикреплен груз.
Изобретение относится к способам и устройствам для поднятия груза (20). По меньшей мере один летающий дрон (9) несет часть этого груза. Предлагается для поднятия груза сопрягать несколько летающих дронов (9, 9b), летающие дроны с грузовым крюком (8) крана (1) и предусмотреть одно общее управление (5) для этих нескольких летающих дронов, летающего дрона и грузового крюка крана, чтобы не надо было несколькими руками с помощью отдельных средств управления одновременно управлять несколькими дронами наряду с крюком крана. Обеспечивается упрощение управления дроном под влиянием соединенного с дроном груза, возможность поднимать груз, превышающий грузоподъемность крана, так чтобы производитель работ на стройплощадке смог обойтись без установки крана большего размера. 3 н. и 20 з.п. ф-лы, 7 ил.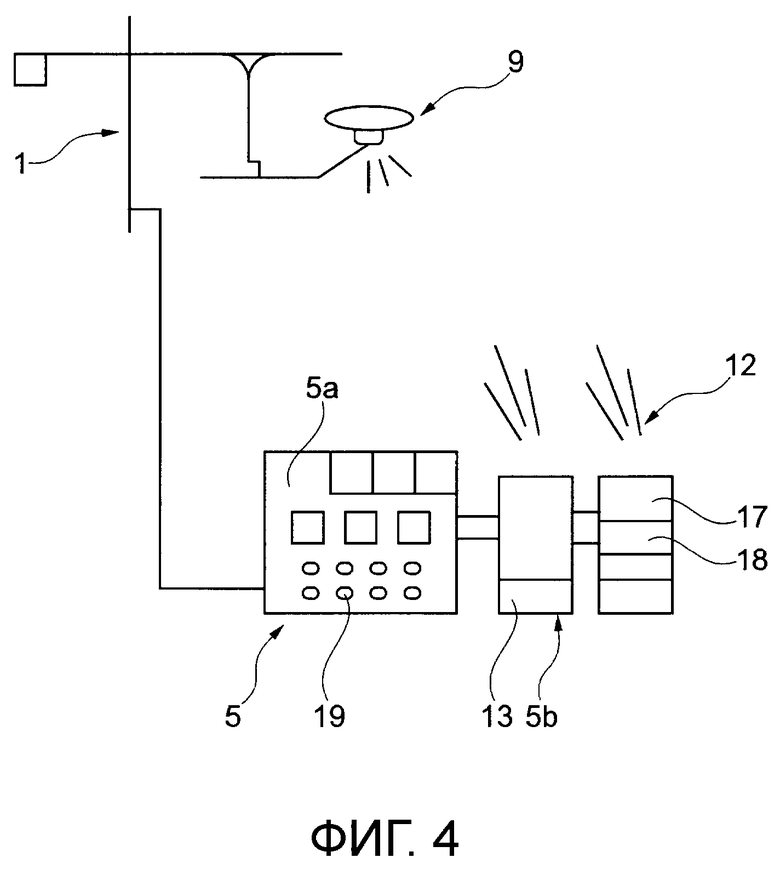
1. Способ поднятия груза (20), при котором по меньшей мере один летающий дрон (9а) несет по меньшей мере часть этого груза (20), отличающийся тем, что груз (20) дополнительно соединяют либо c грузовым крюком (8) крана (1), либо с другим летающим дроном (9b) и грузовым крюком (8) крана (1), а также частично несут и/или направляют краном (1) или указанным другим летающим дроном (9b) и краном (1), причем оба указанных летающих дрона (9a,b) вместе с краном (1) или указанный по меньшей мере один летающий дрон (9a) вместе с краном (1) согласованным друг с другом образом активируют одним общим устройством (5) управления для управления движениями полета и/или крана.
2. Способ по п.1, при этом общее устройство (5) управления имеет главное устройство (5a) управления со средствами (19) ввода для ввода пожеланий к полету и/или движению крана, которым на базе введенных пожеланий к движению генерируются и передаются управляющие сигналы на указанный по меньшей мере один летающий дрон (9a) и/или кран (1), и дополнительное устройство (5b) управления, которым генерируются и передаются управляющие команды для указанного по меньшей мере одного и/или указанного другого летающего дрона (9a; 9b) в зависимости от движений полета или крана, которые были назначены главным устройством (5a) управления.
3. Способ по одному из предыдущих пунктов, при этом управление подъемной и/или тяговой силой и/или траекторией полета дрона (9a; 9b) осуществляется путем варьирования частоты вращения ротора и/или вращающего момента ротора, при этом летающий дрон (9a; 9b) имеет гидростатическую трансмиссию (130) для привода по меньшей мере одного ротора (120–127), включающую в себя по меньшей мере один работающий в качестве насоса гидростат (131), который приводится от приводного двигателя (132), и по меньшей мере один другой, работающий в качестве двигателя гидростат (133, 134), который выполнен с возможностью соединения с ротором, и управление названной частотой вращения ротора и/или вращающим моментом ротора осуществляется путем перестановки гидравлической регулируемой величины гидростатической трансмиссии (130), в частности рабочего объема гидростата, и/или угла поворота гидростата, и/или давления в гидростатическом контуре давления, и/или массового потока в гидростатическом контуре давления.
4. Способ по п.3, при этом в качестве приводного двигателя (132) применяется двигатель внутреннего сгорания, и работа осуществляется в по меньшей мере приблизительно постоянном рабочем состоянии, в частности по меньшей мере приблизительно в диапазоне полной нагрузки, при этом управление изменениями частоты вращения и/или изменениями вращающего момента на роторе осуществляется варьируемым образом путем перестановки указанного по меньшей мере одного гидростата (133; 134; 131).
5. Способ по п.3 или 4, при этом летающий дрон (9a; 9b) выполнен в виде мультикоптера и имеет несколько роторов, каждый из которых приводится один гидростатом (133, 134), при этом для управления траекторией полета и/или направлением тяги летающего дрона (9a; 9b) осуществляется индивидуальная перестановка гидростатов (133, 134) и, тем самым, частоты вращения соединенных с ними роторов.
6. Способ по одному из предыдущих пунктов, при этом управление указанным по меньшей мере одним и/или указанным другим летающим дроном (9a; 9b) осуществляется таким образом, что к грузу (20) прикладывают силу (F) с горизонтальной компонентой (FH), при этом управление летающим дроном (9) осуществляется таким образом, что указанная горизонтальная компонента (FH) противодействует качательному движению груза (20) и/или силе ветра и/или подъемный канат (7) крана удерживается по возможности в вертикальной ориентации.
7. Способ по одному из предыдущих пунктов, при этом управление летающим дроном (9) осуществляется таким образом, что груз (20) при поднятии поворачивается вокруг вертикальной оси, и летающий дрон (9) при поднятии груза (20) совершает полет вдоль по меньшей мере приблизительно винтообразного пути вокруг вертикальной оси, проходящей через груз (20).
8. Способ по одному из предыдущих пунктов, при этом летающий дрон (9) активируется в зависимости от положения крана и/или кранового крюка таким образом, что летающий дрон (9) автоматически следует за движениями крана и/или кранового крюка и сохраняет желаемое положение относительно крана и/или кранового грузового крюка даже при движениях крана.
9. Способ по п.8, при этом положение летающего дрона (9) относительно крана (1) определяется автоматически непрерывно или циклически с помощью устройства (18) для определения положения, при этом летающий дрон (9) активируется устройством (13) управления положением в зависимости от сигнала устройства (18) для определения положения таким образом, что относительное положение между летающим дроном (9) и краном остается по меньшей мере приблизительно постоянным и/или следует по предопределенному пути.
10. Способ по одному из предыдущих пунктов, при этом дистанционное управление летающим дроном (9) в режиме автономного управления осуществляется автономно таким образом, что летающий дрон (9) совершает полет в разные желаемые положения относительно крана (1) или относительно ведущего летающего дрона (9a).
11. Способ по одному из предыдущих пунктов, при этом управление определенными рабочими параметрами указанного по меньшей мере одного летающего дрона (9), в частности частотой вращения и/или углом установки ротора, осуществляется с помощью устройства (5) управления так, что грузозахватное средство на летающем дроне (9), которое соединяет этот дрон (9) с грузом (20) или грузовым крюком (20), подвергается воздействию желаемой силой, в частности имеющей определенную величину силы и/или определенное направление силы.
12. Устройство для поднятия груза (20), при котором по меньшей мере один летающий дрон (9а) соединен с грузом (20) грузозахватным средством для несения по меньшей мере части груза (20), отличающееся тем, что груз (20) соединен либо с грузовым крюком (8) крана (1), либо с другим летающим дроном (9b) и грузовым крюком (8) крана (1), при этом предусмотрено общее устройство (5) управления для взаимно согласованного активирования обоих указанных летающих дронов (9a, b) вместе с краном (1) или для взаимно согласованного активирования указанного по меньшей мере одного дрона (9a) вместе с краном (1).
13. Устройство по п.12, при этом общее устройство (5) управления имеет главное устройство (5a) управления со средствами (19) ввода для ввода пожеланий к полету или движению крана, которым на базе введенных пожеланий к движению генерируются и передаются управляющие сигналы на указанный по меньшей мере один летающий дрон (9a) и/или кран (1), и дополнительное устройство (5b) управления, которое выполнено для того, чтобы генерировать управляющие команды для указанного по меньшей мере одного и/или указанного другого дрона (9a; 9b) в зависимости от движений полета или крана, которые были назначены главным устройством (5a) управления.
14. Устройство по п.11 или 12, при этом устройство (5) управления имеет устройство (13) управления положением, которое имеет автоматический модуль управления следованием для активирования летающего дрона (9) в зависимости от положения крана и/или положения ведущего летающего дрона таким образом, что летающий дрон (9) автоматически следует движениям крана и/или ведущего летающего дрона и сохраняет желаемое положение относительно крана и/или ведущего летающего дрона даже при движениях крана и/или ведущего летающего дрона.
15. Устройство по одному из пп.11–13, при этом устройство (5) управления выполнено для того, чтобы активировать летающий дрон (9) так, чтобы летающий дрон (9) при поднятии груза (20) летел вдоль предопределенной траектории относительно крана, в частности вдоль винтовой траектории вокруг вертикальной, проходящей через груз (20) оси.
16. Устройство по одному из пп.11–14, при этом устройство (13) управления положением имеет автономный модуль управления для автономного дистанционного управления летающим дроном (9) таким образом, что летающий дрон (9) прилетает в разные желаемые положения относительно машины и/или ее рабочего инструмента.
17. Устройство по одному из пп.11–15, при этом предусмотрено устройство (18) для определения положения для определения положения летающего дрона (9) относительно крана (1) и/или относительно ведущего летающего дрона, при этом устройство (13) управления положением выполнено для того, чтобы управлять летающим дроном (9) в зависимости от автоматически определенного относительного положения.
18. Устройство по п.17, при этом летающий дрон (9) имеет блок GPS для определения абсолютного положения летающего дрона (9), при этом устройство (13) управления положением для управления положением летающего дрона (9) относительно машины выполнено для того, чтобы управлять летающим дроном (9) в зависимости от данных абсолютного положения дрона (9) и данных абсолютного положения перевалочной и/или строительной машины и/или ее рабочего инструмента.
19. Устройство по п.18, при этом устройство (18) для определения положения имеет устройство для локализации сигналов для локализации подаваемого летающими дроном (9) сигнала, при этом названное устройство для локализации сигналов имеет установленные на кране, находящиеся на расстоянии друг от друга приемно–передающие блоки (15) для поддержания связи с приемно–передающим блоком (16) на летающем дроне (9), а также устройство оценки для оценки передаваемых сигналов между приемно–передающими блоками (15) крана и приемно–передающим блоком (16) дрона с точки зрения предопределенных свойств сигналов, в частности с точки зрения периода прохождения сигнала и/или интенсивности сигнала, и определения положения летающего дрона (9) относительно крана (1) из этих свойств сигнала.
20. Устройство по одному из пп.11–18, при этом летающий дрон (9) имеет гидростатическую трансмиссию (130), которая включает в себя по меньшей мере один работающий в качестве насоса гидростат (131), привод которого осуществляется приводным двигателем (132), а также по меньшей мере один другой гидростат (133, 134), который имеет приводное соединение с ротором летающего дрона, работает в качестве двигателя и выполнен с возможностью снабжения давлением от работающего в качестве насоса гидростата (131).
21. Устройство по п.20, при этом в качестве приводного двигателя (132) предусмотрен двигатель (VKM) внутреннего сгорания.
22. Устройство по п.20 или 21, при этом летающий дрон (9) выполнен в виде мультикоптера и имеет несколько роторов, при этом гидростатическая трансмиссия (130) имеет несколько работающих в качестве двигателя гидростатов (133, 134), которые имеют каждый приводное соединение с одним ротором и выполнены с возможностью индивидуальной перестановки, чтобы индивидуально управлять частотой вращения роторов, соединенных с соответствующими гидростатами.
23. Способ поднятия груза (20), при котором по меньшей мере один летающий дрон (9а) несет по меньшей мере часть этого груза (20), причем груз (20) соединяют с другим летающим дроном (9b) и частично несут и/или направляют указанным другим летающим дроном (9b), причем оба указанных летающих дрона (9a, b) друг с другом согласованным друг с другом образом активируют одним общим устройством (5) управления для управления движениями полета, отличающийся тем, что подъемной и/или тяговой силой и/или траекторией полета летающих дронов (9а, 9b) управляют посредством варьирования частоты вращения ротора и/или вращающего момента ротора, при этом летающий дрон (9a; 9b) имеет каждый гидростатическую трансмиссию (130) для привода по меньшей мере одного ротора (120–127), включающую в себя по меньшей мере один работающий в качестве насоса гидростат (131), который приводится от приводного двигателя (132), и по меньшей мере один другой, работающий в качестве двигателя гидростат (133, 134), который выполнен с возможностью соединения с ротором, и управление названной частотой вращения ротора и/или вращающим моментом ротора осуществляют путем перестановки рабочего объема гидростата и/или угла поворота гидростата и/или перекачивающей мощности гидростата.
| US 20090299551 A1, 03.12.2009 | |||
| US 9079662 B1, 14.07.2015 | |||
| US 9205922 B1, 08.12.2015 | |||
| WO 2016068767 A1, 06.05.2016 | |||
| СИСТЕМА ДЛЯ ПОДЪЕМА И ТРАНСПОРТИРОВКИ ПО ВОЗДУХУ ТЯЖЕЛЫХ ГРУЗОВ | 2010 |
|
RU2449924C1 |
| Способ пилотирования при монтаже груза с помощью двух вертолетов | 1990 |
|
SU1763292A1 |

