РОДСТВЕННАЯ ЗАЯВКА (ЗАЯВКИ)
Данная заявка основана на предварительной заявке на патент США серийный №62/294,045, поданной 11 февраля 2016 года, содержание которой включено сюда путем ссылки во всей своей полноте, и по которой испрашивается приоритет.
ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Различные иллюстративные варианты осуществления относятся к калибровке систем привода.
УРОВЕНЬ ТЕХНИКИ
Хорошо известно использование систем гидростатических приводов для машин с промышленными, сельскохозяйственными и другими задачами. В гидростатическом приводе используется находящаяся под давлением гидравлическая жидкость для управляемого приведения в действие гидравлического двигателя с помощью одного или более гидростатических насосов переменного объема. Двойная гидростатическая трансмиссия может содержать два гидростатических насоса, которыми может управлять пользователь в кабине. Средства управления кабины соединены с рычагом независимой подвески, который функционально соединен с наклонной шайбой в каждом из насосов. Поперечный рычаг можно поворачивать из нейтрального положения в первом направлении для непрямого перемещения наклонной шайбы в насосе с целью приведения в движение ведущего приводного колеса на транспортном средстве вперед, и можно поворачивать в противоположном направление для перемещения наклонной шайбы и приведения в движение ведущего приводного колеса в обратном направлении. Одно или более средств управления и рычажных передач оператора, соединенных с поперечным рычагом, обеспечивают оператору возможность установки положения поперечного рычага, и таким образом управления перемещением машины.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
Различные иллюстративные варианты осуществления направлены на способ регулирования системы гидравлического привода. Система привода приводится в действие, при этом система привода имеет устройство управления, которое функционально соединено с тросом и гидравлическим насосом, и при этом устройство управления выполнено с возможностью перемещения так, чтобы вызывать перемещение троса, а трос выполнен с возможностью перемещения так, чтобы вызывать регулирование производительности гидравлического насоса. Определяется переднее положение остановки устройства управления и переднее значение остановки, связанное с передним положением остановки. Определяется заднее положение остановки устройства управления и заднее значение остановки, связанное с задним положением остановки. Определяется исходное положение переднего хода устройства управления и исходное Значение перемещения вперед, связанное с исходным положением переднего хода. Определяется исходное положение заднего хода устройства управления и исходное значение заднего хода, связанное с исходным положением заднего хода. Переднее значение остановки, заднее значение остановки, значение исходного положения переднего хода и значение исходного положения заднего хода используют для вычисления буферного значения переднего хода и буферного значения заднего хода. Буферное значение переднего хода и буферное значение заднего хода используют для определения величины регулирования системы привода.
Согласно еще одному варианту осуществления система привода приводится в действие, при этом система привода имеет рукоятку, выполненную с возможностью перемещения в щели, и при этом рукоятка выполнена с возможностью перемещения для регулирования перемещения транспортного средства. Определяется переднее положение остановки рукоятки и переднее значение остановки, связанное с передним положением остановки. Определяется заднее положение остановки рукоятки и заднее значение остановки, связанное с задним положением остановки. Определяется исходное положение переднего хода рукоятки и Значение перемещения вперед, связанное с исходным положением переднего хода. Определяется исходное положение заднего хода рукоятки и значение перемещения назад, связанное с исходным положением заднего хода. Переднее значение остановки, заднее значение остановки, Значение перемещения вперед и значение перемещения назад используют для вычисления буферного значения переднего хода и буферного значения заднего хода. Буферное значение переднего хода и буферное значение заднего хода используют для определения величины регулирования системы привода.
Различные иллюстративные варианты осуществления также направлены на способ выполнения ручного регулирования системы гидравлического привода, имеющей гидравлический насос, рукоятку, выполненную с возможностью приведения в действие гидравлического насоса, поперечный рычаг, функционально соединенный с гидравлическим насосом, трос, функционально соединенный с рукояткой и с рычагом независимой подвески, и оболочку, расположенную вокруг троса. Поперечный рычаг смещается в переднее положение, а где трос выходит из оболочки, сделана первая метка. Поперечный рычаг смещается в заднее положение, а где трос выходит из оболочки, сделана вторая метка. Третья метка сделана по существу на равном удалении между первой меткой и второй меткой. Механизм регулирования изменяется на регулирование положения троса таким образом, что выход из оболочки по существу выровнен с третьей меткой.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Аспекты и признаки различных иллюстративных вариантов осуществления станут более понятными из описания приведенных иллюстративных вариантов осуществления, рассматриваемого со ссылкой на сопровождающие чертежи, на которых:
ФИГ. 1 представляет собой упрощенный вид в перспективе изображение иллюстративного транспортного средства;
ФИГ. 2 представляет собой схематичный вид части системы управления гидравлическим приводом;
ФИГ. 3 представляет собой схематичный вид щели рукоятки, показывающее различные иллюстративные положения привода;
ФИГ. 4 представляет собой блок-схему иллюстративного способа регулирования системы привода;
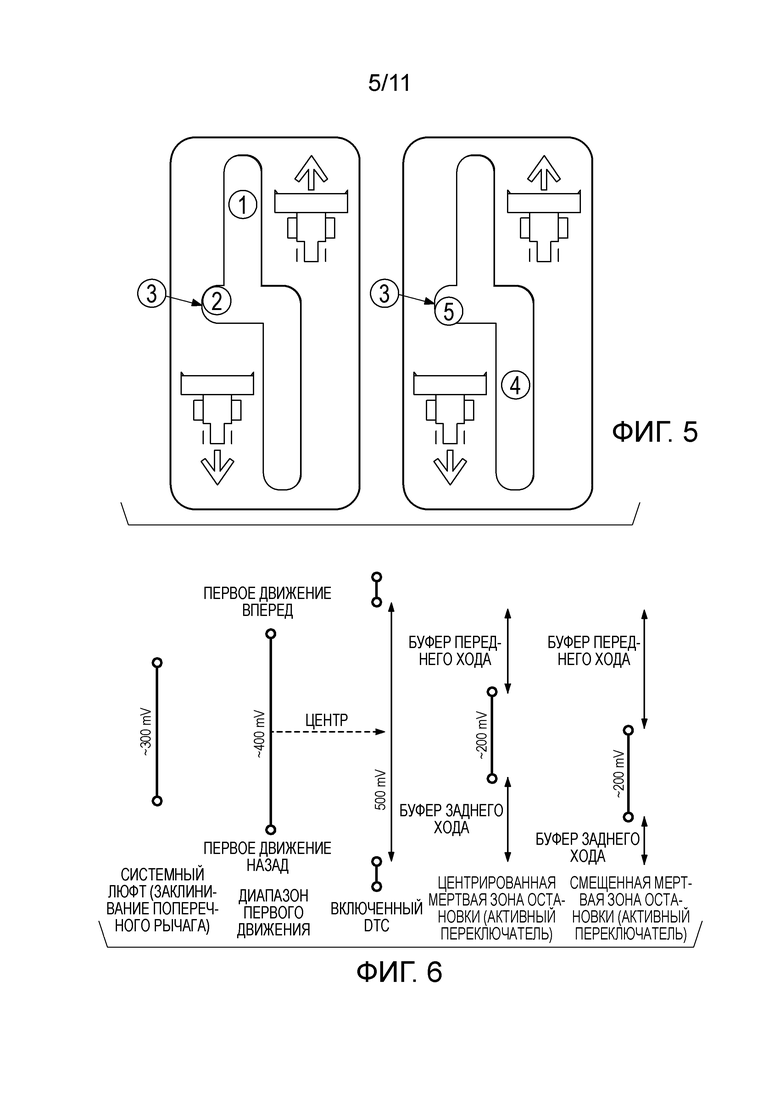
ФИГ. 5 представляет собой вид сверху гидравлической щели рукоятки;
ФИГ. 6 представляет собой схематичный вид, показывающий процедуру центрирования и смещения;
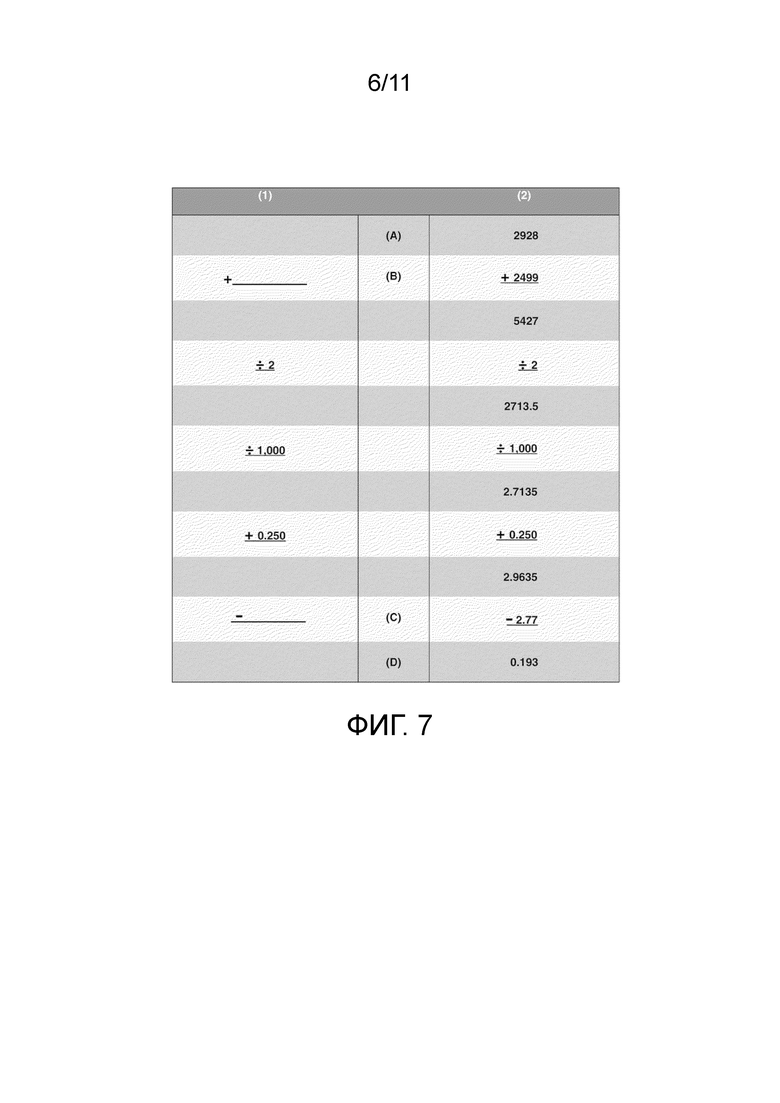
ФИГ. 7 представляет собой иллюстративный вычисленный лист для регулирования системы привода;
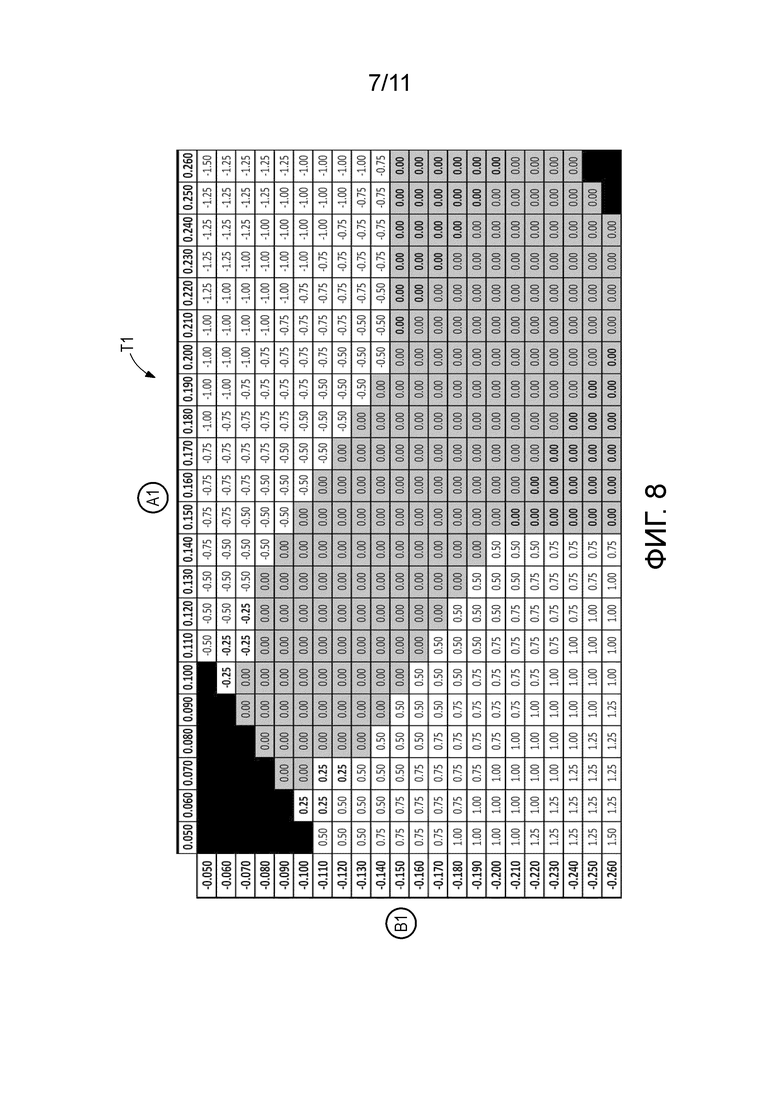
ФИГ. 8 представляет собой иллюстративную первую таблицу, показывающую регулировочные значения для системы привода;
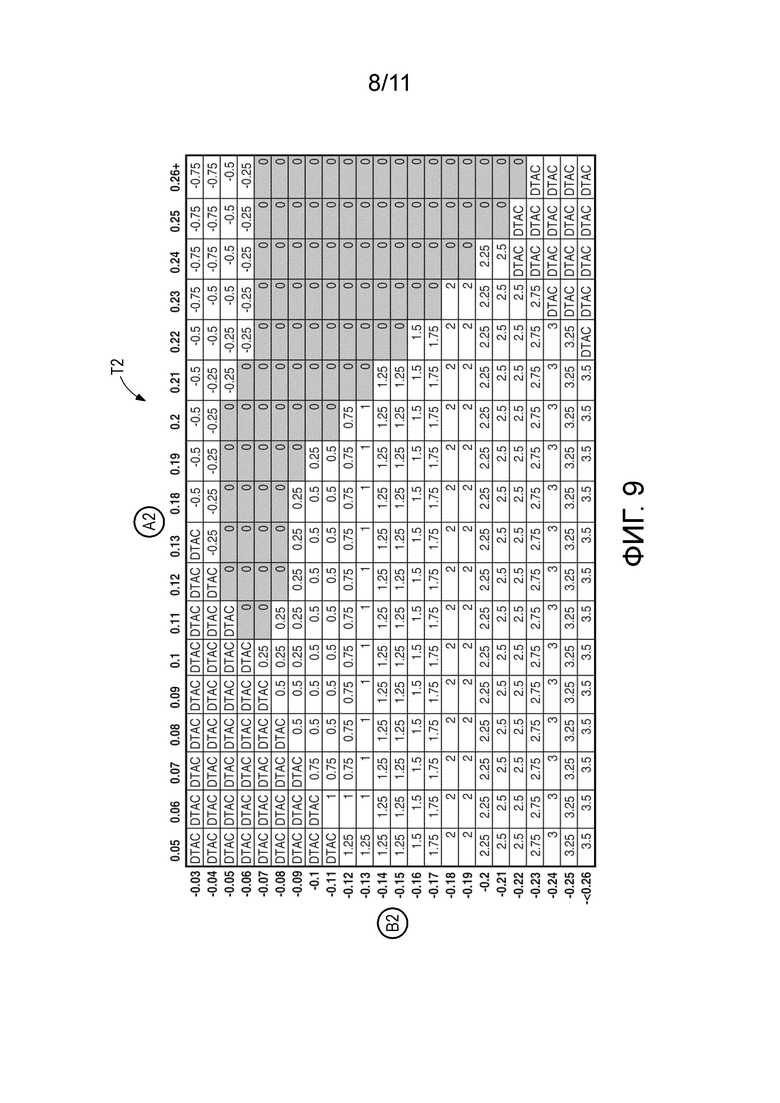
ФИГ. 9 представляет собой иллюстративную вторую таблицу, показывающую регулировочные значения для системы привода;
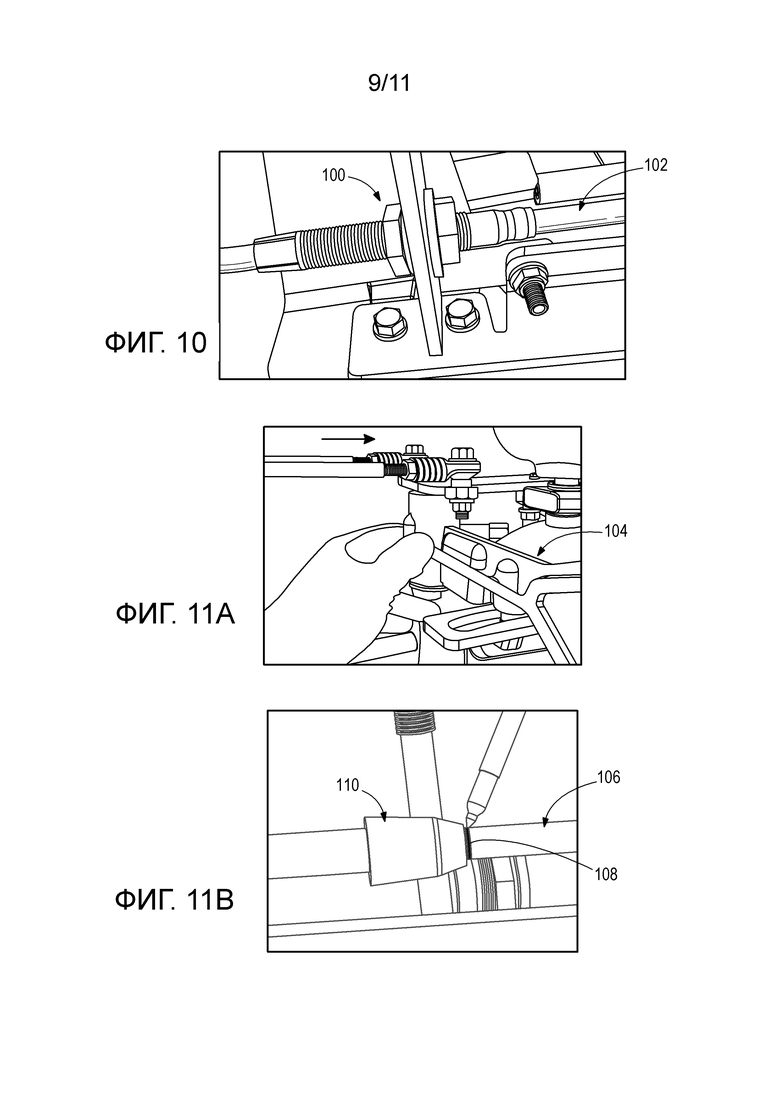
ФИГ. 10 представляет собой частичный вид системы привода, показывающий механизм регулирования; и
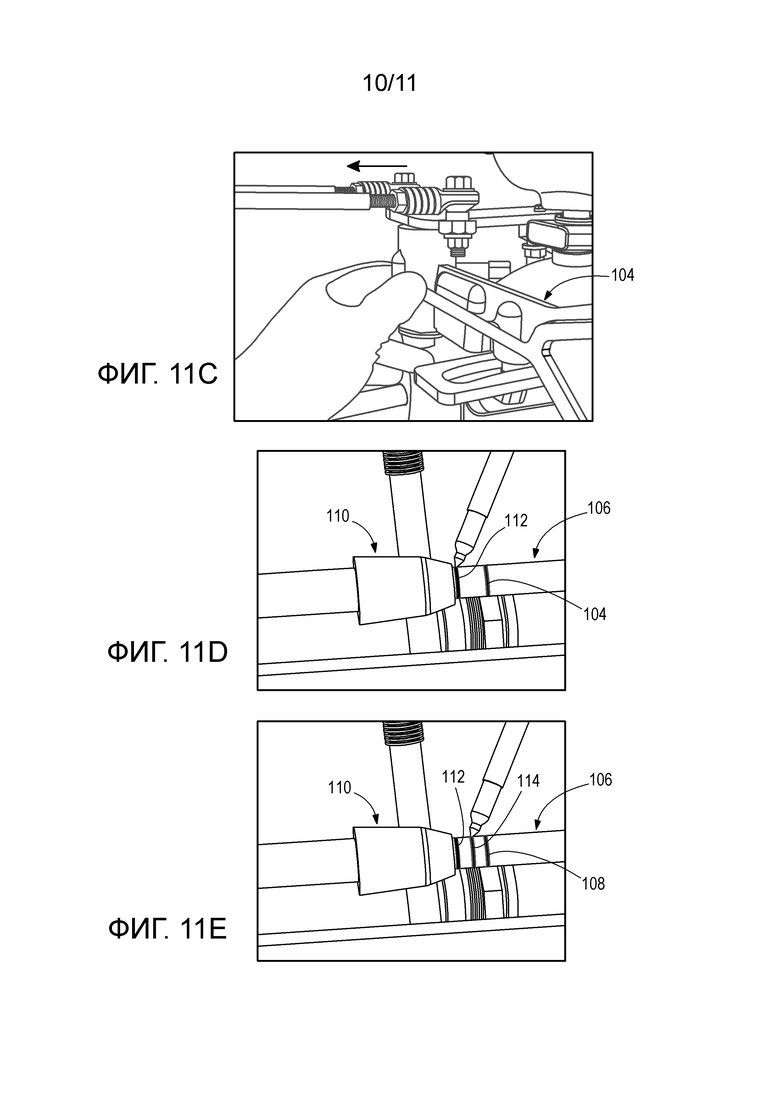
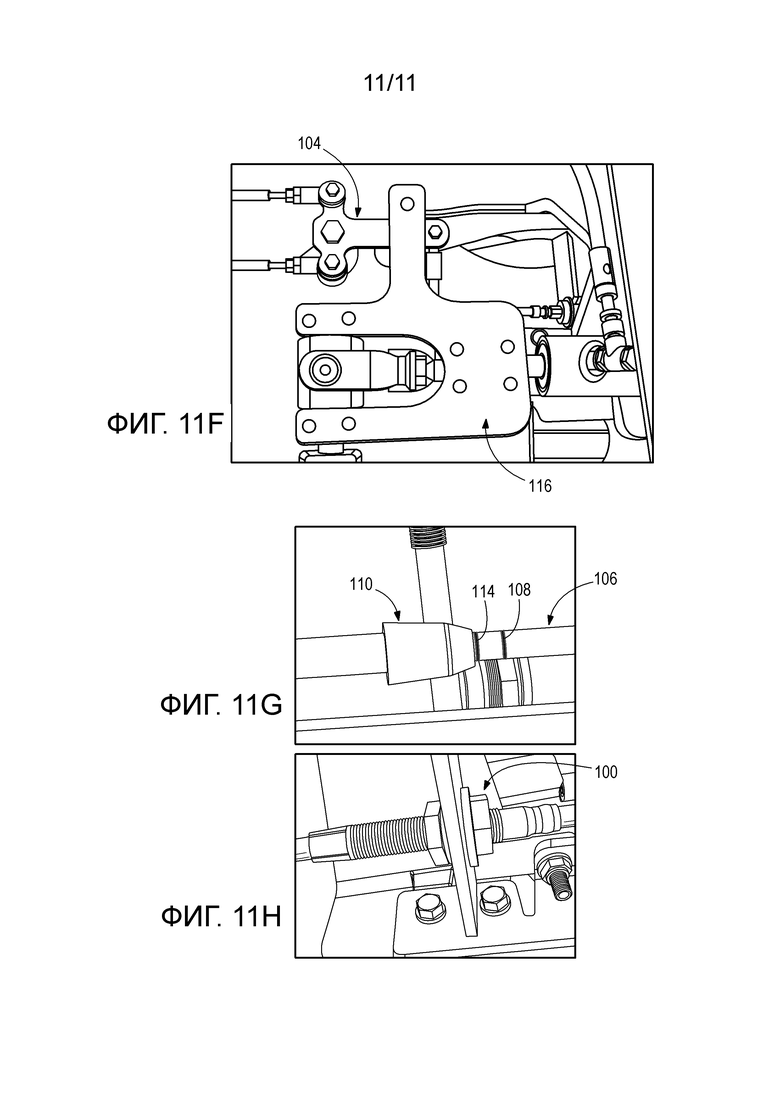
ФИГ. 11А-11Н представляют собой частичные виды системы привода, изображающие способ ручного регулирования.
ПОДРОБНОЕ ОПИСАНИЕ ИЛЛЮСТРАТИВНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ ИЗОБРЕТЕНИЯ
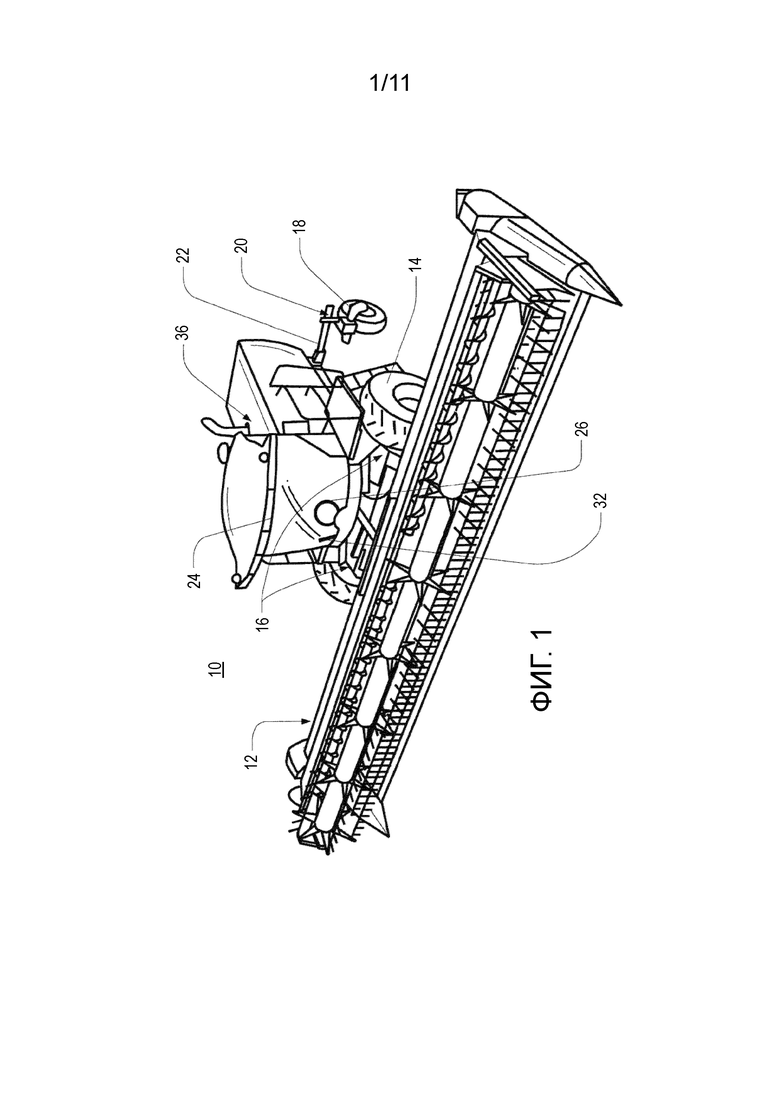
ФИГ. 1 показывает иллюстративное сельскохозяйственное транспортное средство 10. Следует понимать, что конфигурация транспортного средства 10, представленного на фиг. 1, предназначена только для примера, и что с различными иллюстративными вариантами осуществления, описанными в данном документе, могут использоваться другие конфигурации транспортных средств и машины, соответствующие другим задачам. Как показано на фиг. 1, транспортным средством 10 может быть сельскохозяйственный валкоукладчик с жаткой 12 для скашивания и сбора выращенного материала (например, полотенной платформой). Передние колеса 14 могут быть зафиксированы в обращенной вперед ориентации (т.е. не могут поворачиваться относительно транспортного средства 10) и могут независимо приводиться в действие соответствующими гидростатическими машинами для управления передней частью транспортного средства 10. Например, контур 16 гидравлического привода для каждого из передних колес 14, соответственно, может содержать две различные гидравлические (или другие) машины, такие как гидравлический насос, приводимый в действие двигателем 36 транспортного средства 10, и гидравлический двигатель, приводимый в действие гидравлическим насосом. Образование пар двигателей-насосов соответствующими контурами 16 привода может использоваться соответствующим образом, соответственно, для приведения в движение левых и правых колес 14 с независимыми (и потенциально различающимися) скоростями вращения. Таким образом, хотя передние колеса 14 не могут поворачиваться относительно транспортного средства 10, передними колесами 14 можно управлять (и можно управлять транспортным средством 10) на основании разницы скорости между левым передним колесом 14 и правым передним колесом 14 (например, которыми управляют с помощью левого и правого контуров 16 гидравлического привода, соответственно). Как обсуждается более подробно ниже, переднее рулевое устройство различных конфигураций может использоваться для управления относительными скоростями гидравлических двигателей, и посредством этого для регулирующего управления передними колесами 14.
Задние колеса 18 также могут быть управляемыми колесами, хотя задние колеса 18 могут быть выполнены иным образом, чем передние колеса 14. Например, задние колеса 18 могут быть установлены, соответственно, на колесных узлах 20, которые могут обеспечивать возможность вращения колес 18 независимо друг от друга и от неподвижной опоры 22 задних колес. Следует понимать, что могут быть возможны различные другие конфигурации задних колес 18, и что структуры управления, предусматриваемые данным раскрытием, или другие конфигурации также могут использоваться с несамоустанавливающимися задними колесами.
Транспортное средство 10 также может содержать кабину 24, из которой оператор может управлять работой транспортного средства 10. В кабине 24 может содержаться устройство входа рулевого управления, такое как рулевое колесо 26, так что оператор может направлять рулевое управление транспортного средства 10 (в определенных режимах рулевого управления) за счет предоставления ручного входа рулевого управления. Следует понимать, что дополнительно (или в качестве альтернативы) могут использоваться другие устройства входа рулевого управления (например, рычаги, джойстики, сенсорные устройства и так далее). Также внутри кабины могут быть предоставлены различные другие устройства ввода. Например, устройство управления гидравлической системой (например, рычаг 32 гидравлического управления) может быть предоставлено для перевода транспортного средства между различными рабочими режимами (например, между активным рабочим режимом, в котором приведены в действие различные гидравлические системы, режимом остановки, в котором транспортное средство находится во включенном состоянии, но различные гидравлические системы могут быть не задействованы, и так далее).
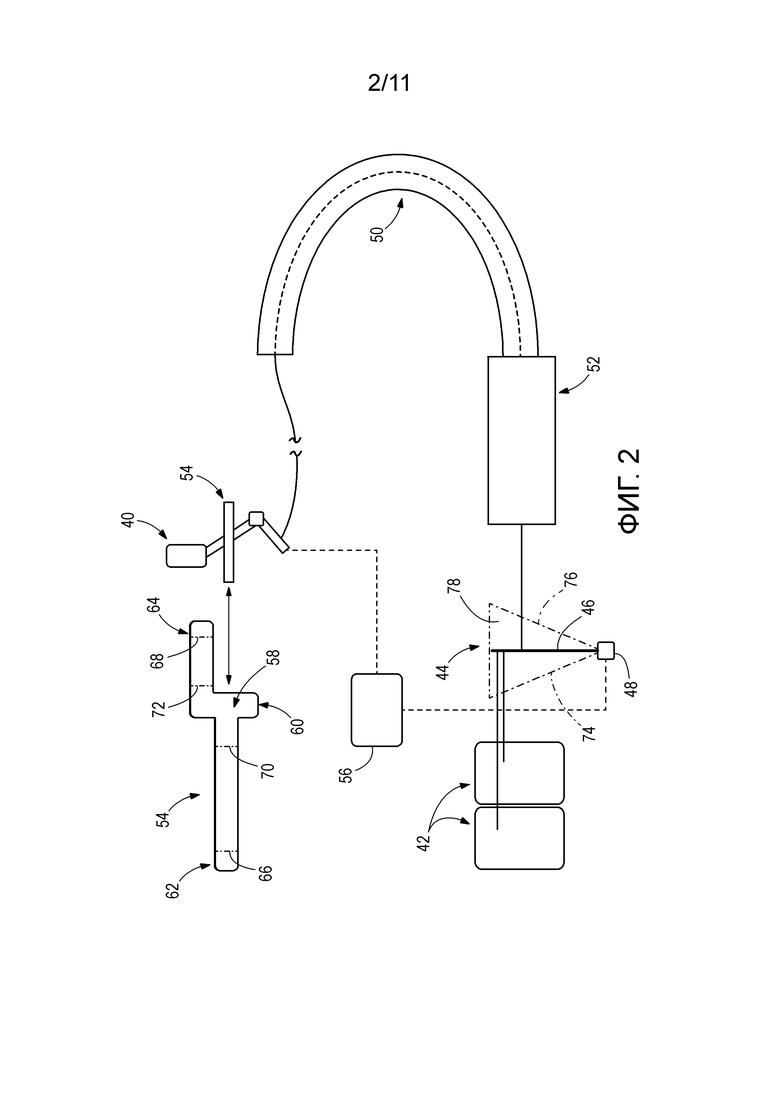
ФИГ. 2 показывает схематичный вид части гидростатической системы ходового привода с приводимым в действие вручную устройством управления, например, рукояткой 40, функционально соединенной с гидравлической системой. Гидравлическая система содержит один или более насосов 42, приводимых в действие двигателем (не показано). Насосы 42 соединены с узлом 44 поперечного рычага, имеющим рычаг 46 независимой подвески, который соединен с шарниром 48, который обеспечивает возможность перемещения рычага 46 независимой подвески из положения в центре через диапазон положений переднего и заднего хода. Перемещением узла 44 поперечного рычага управляют с помощью рукоятки 40, которая функционально соединена с рычагом 46 независимой подвески. Шарнир 48 может содержать датчик для выявления положения рычага 46 независимой подвески и подачи сигнала, например, в контроллер 56. В иллюстративном варианте осуществления данная рукоятка функционально соединена с рычагом 46 независимой подвески посредством троса 50, имеющего механизм регулирования. Рукоятка 40 может перемещаться в щели 54 рукоятки между нейтральным участком 58, стояночной выемкой 60, участком 62 переднего хода и участком 64 заднего хода. Насосы 42 реагируют на ввод, создаваемый перемещением рукоятки 40, приводя в действие двигатель, и производят движение транспортного средства.
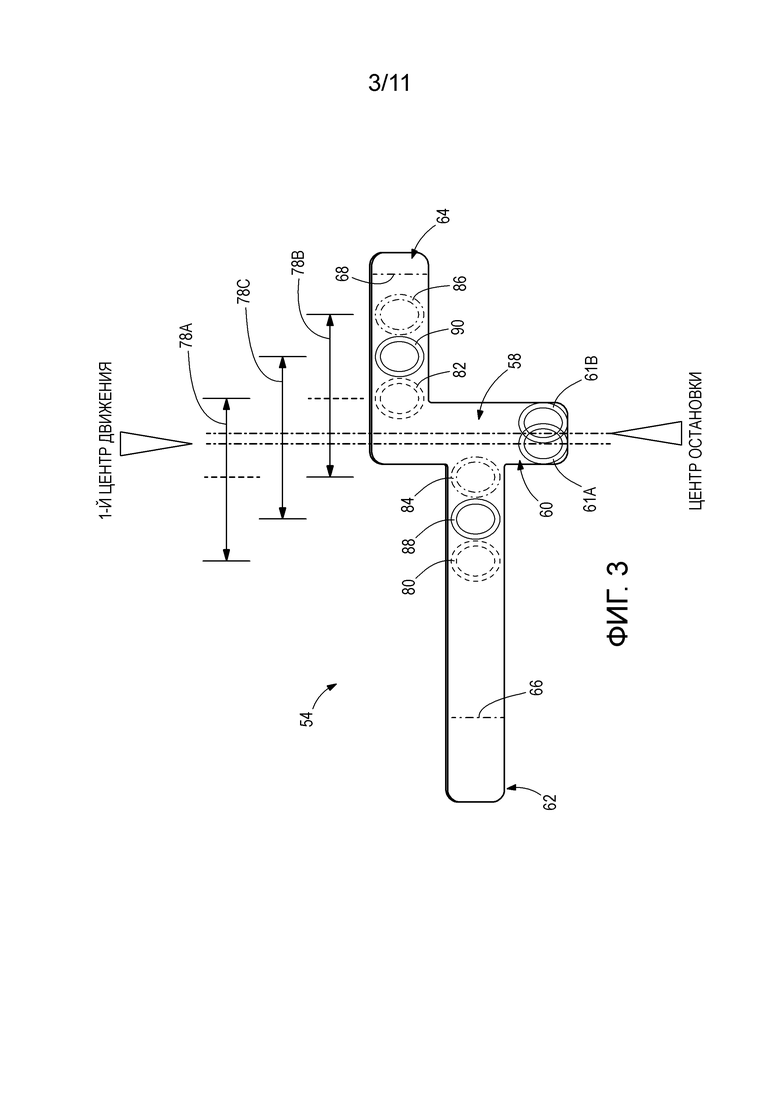
Также со ссылкой на ФИГ. 3, когда рукоятка расположена в стояночной выемке 60, например, где-то между передним положением 61А остановки и задним положением 61В остановки, контроллер 56 может определить, что транспортное средство находится в состоянии остановки. При обнаружении состояния остановки контроллер 56 может быть выполнен с возможностью предпринять ряд действий или предотвратить ряд действий. Например, контроллер может быть выполнен с возможностью инициировать переключатель стояночного тормоза и прекратить или предотвратить работу других внешних составных элементов в зависимости от типа транспортного средства. В альтернативных вариантах осуществления контроллер 56 может зарегистрировать, что транспортное средство находится в состоянии остановки, и активировать переключатель стояночного тормоза, когда рукоятка 40 расположена на нейтральном участке 58 в течение некоторого периода времени, или состояние остановки может быть инициировано другими способами, включая ручной переключатель. Пользователю может быть дано указание, что транспортное средство находится на остановке, посредством либо одного, либо более тактильных, аудио или визуальных указаний.
Рукоятку 40 можно перемещать вдоль участка 62 переднего хода от исходного положения до переднего ограничителя 66 и вдоль участка 64 заднего хода до заднего ограничителя 68. Передним и задним ограничителями 66, 68 являются, например, физические ограничители рукоятки в направлении вперед и в обратном направлении, которые обозначают максимальную скорость переднего и заднего хода. Точные положения переднего и заднего ограничителей 66, 68 могут отличаться для различных машин, и следует заметить, что данные положения являются примерами и не в масштабе. Положение рукоятки 40 преобразуется в мощность гидравлической системы. Мощность и положение рукоятки 40 может выражаться в показателях вольтах (В) или милливольтах (мВ), которые используют в качестве ссылки для мониторинга и обнаружения неисправности.
Согласно различным иллюстративным вариантам осуществления щель 54 также содержит исходное положение 70 рукоятки переднего хода, где инициируется движение транспортного средства вперед, и исходное положение 72 заднего хода, где инициируется движение транспортного средства назад. Исходное положение 70 рукоятки переднего хода соответствует исходному положению 74 поперечного рычага переднего хода, а исходное положение 72 заднего хода рукоятки соответствует исходному положению 76 поперечного рычага заднего хода (ФИГ. 2). Исходные положения 74, 76 поперечного рычага переднего хода и заднего хода ограничивают область 78 мертвой зоны, где перемещение рукоятки 40 и, соответственно, рычага 46 независимой подвески, не приводят к перемещению транспортного средства. Точные позиции исходного положения переднего хода и исходного положения заднего хода 70, 72, 74, 76 могут отличаться для различных машин, и следует заметить, что данные положения являются примерами и не в масштабе. Область 78 мертвой зоны может быть обусловлена различными составными элементами в системе, включая люфт или разрегулированность троса 50 или других составных элементов, соединяющих рукоятку 40 с узлом 46 поперечного рычага, или составных элементов в самом узле 46 поперечного рычага. В каждом транспортном средстве размер и положение области 78 мертвой зоны могут быть различными. Согласно иллюстративному варианту осуществления область мертвой зоны составляет приблизительно 250 мВ в направлении переднего и заднего хода от калиброванной центральной точки.
ФИГ. 3 показывает различные иллюстративные положения, связанные с рукояткой 40, иллюстрирующие различные сценарии для области 78 мертвой зоны. Первый набор положений 80, 82 обозначает исходное положение переднего хода рукоятки 40 и исходное положение заднего хода, когда возникает разрегулированность в направлении вперед, приводящая к смещенной вперед области 78А мертвой зоны. Второй набор положений 84, 86 обозначает исходное положение переднего хода рукоятки и исходное положение заднего хода, когда возникает разрегулированность в обратном направлении, приводящая к смещенной назад области 78В мертвой зоны. Если исходные положения переднего или заднего хода находятся слишком близко к нейтральному участку, транспортное средство может самопроизвольно перемещаться, при смещении в нейтральное и стояночное положение или из него. Если исходные положения переднего или заднего хода находятся слишком далеко от нейтрального положения, проблемы настройки рукоятки могут приводить к жалобам пользователя. Третий набор положений 88, 90 обозначает исходные положения после выравнивания для центрирования области 78С мертвой зоны. Следует заметить, что данные положения являются примерами и не в масштабе.
Для определения, находится ли система в активированном состоянии, которое может приводить к перемещению транспортного средства, с системой привода может быть соединен датчик. Например, датчик движения, связанный с узлом 46 поперечного рычага, может определить, являются ли активными один или более насосов 42. Данный датчик может использоваться для определения, имеется ли в системе движения ошибка, которая может приводить к непреднамеренному перемещению транспортного средства, когда оператор думает, что транспортное средство должно находиться в нейтральном или стояночном положении. Определение в системе движения подобной ошибки может запустить диагностический код неисправности (DTC), который заставляет блок управление или контроллер остановить или заблокировать систему до тех пор, пока проблема не будет зафиксирована. Например, если датчик обнаруживает, что система привода находится в активированном состоянии в то время, как рукоятка находится в области мертвой зоны остановки, может быть запущен DTC. DTC также запускается, если переключатель остановки является активным, а датчик движения снимает показание за пределами области первого хода. Однако, к DTC может приводить ряд факторов, в том числе, если механическая центральная точка сдвигается с течением времени вследствие срабатывания и износа деталей или откалибрована не должным образом для начала DTC. ФИГ. 3 показывает примеры того, как может возникать данная ошибка, когда положения 82 и 84 немного перекрывают нейтральный участок 58 или стояночную выемку 60. Это делает запуск DTC более вероятным, так как система может считать, что движение транспортного средства возникает в пределах области мертвой зоны остановки, которая определяется датчиком движения.
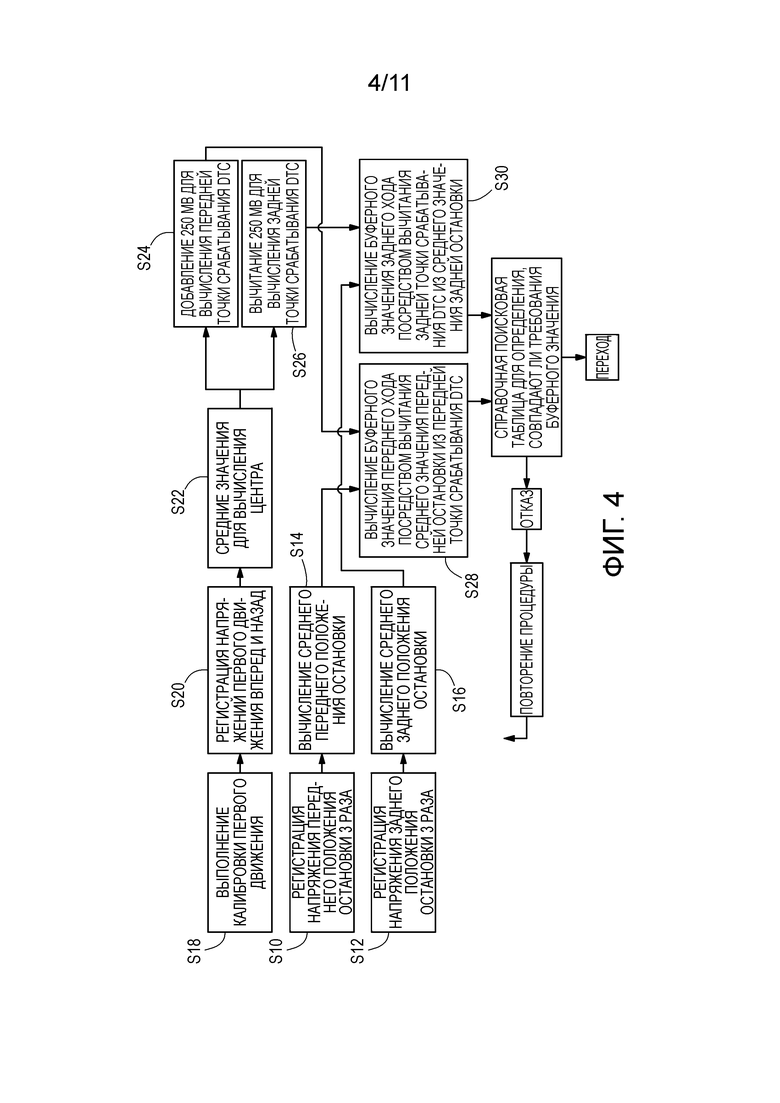
Различные иллюстративные варианты осуществления направлены на определение исходных положений переднего и заднего хода и переднего и заднего положений остановки и регулирование механического центра системы привода и, таким образом, центра движения, чтобы избежать DTC. На фиг. 4 и 5 изображен пример данного процесса. Согласно иллюстративному варианту
осуществления определяется переднее положение остановки и заднее положение остановки. Транспортное средство помещают в выключенное состояние, а рукоятку передвигают к переднему ограничителю 1 (максимальное расстояние, возможное в направлении вперед) и возвращают в переднее положение 2 остановки, в стояночной выемке 3, как показано на фиг. 5, а значение датчика движения в переднем положении 2 остановки измеряют и регистрируют в качестве Переднего значения остановки (S10). Передним положением остановки является первое положение, при возврате в положение остановки из направления переднего хода, где имеется указание, что транспортное средство находится на остановке и/или включается переключатель остановки. Затем рукоятку передвигают к заднему ограничителю 4 (максимальное расстояние, возможное в обратном направлении) и возвращают в положение остановки, чтобы найти заднее положение 5 остановки, а значение датчика движения в заднем положении 5 остановки измеряют и регистрируют в качестве Заднего значения остановки (S12). Данную процедуру измерения можно выполнять множество раз, например, три раза или более, а результаты можно усреднить, чтобы найти среднее значение передний ход-остановка (S14) и среднее значение задний ход-остановка (S16). Измерения могут выполняться специалистом и/или подходящим диагностическим инструментом, либо автоматически, либо вручную, либо в их комбинации. Значения могут регистрироваться в В, мВ или в других подходящих единицах.
Также рассчитывают расстояния от положения остановки до исходного положения переднего хода и исходного положения заднего хода (S18). Транспортное средство помещают на плоской поверхности, а двигатель запускают с рукояткой в положении остановки. Рукоятку передвигают в нейтральное положение и медленно толкают вперед до тех пор, пока не будет выявлено движение транспортного средства. В точке обнаружения данного движения, значение датчика движения регистрируется в качестве Значения переднего хода (S20). Затем рукоятку возвращают в положение остановки. Рукоятку передвигают в нейтральное положение и медленно толкают назад до тех пор, пока не будет выявлено движение транспортного средства. В точке обнаружения данного движения, значение датчика движения регистрируется в качестве Значения перемещения назад (S20). Затем рукоятку возвращают в положение остановки. Измерения могут выполняться специалистом и/или подходящим диагностическим инструментом, либо автоматически, либо вручную, либо в их комбинации. Значения могут регистрироваться в В, мВ или в других подходящих единицах.
После вычисления данных значений их используют для вычисления буферного значения переднего хода и буферного значения заднего хода. Согласно различным иллюстративным вариантам осуществления буферные значения могут быть одинаковыми в направлениях переднего и заднего хода (расположенная в центре стояночная мертвая зона), или они могут быть сдвинуты в одну или другую сторону (смещенная стояночная мертвая зона), как изображено на фиг. 6. Сдвиг буферной зоны в направлении вперед или в обратном направлении может помочь провести компенсацию для систем, где с течением времени вероятно возникновение неравномерных сдвигов в системе в направлении вперед или назад. В системах, где нет сдвигов, или сдвиги являются равномерными в обоих направлениях, сдвиг буферной зоны не нужен.
ФИГ. 4 дополнительно описывает иллюстративный процесс калибровки, а ФИГ. 7 показывает иллюстративное уравнение, используемое для вычисления буферного значения переднего хода и буферного значения заднего хода, которые приводятся в качестве значения (D). Столбец (1) показывает пустой бланк, в который должны быть занесены значения предыдущих измерений, а столбец (2) показывает иллюстративный вычисление с использованием значений, полученных из примера методики. При проведении вычисления, (А) представляет собой Значение перемещения вперед в мВ, а (В) представляет собой Значение перемещения назад в мВ, которые складывают вместе, а затем делят на 2 (S22). Результат данного значения затем делят на 1000 для перевода значения из мВ в В. Затем прибавляют значение, равное 0,25 В (буферное значение переднего хода) (S24), или вычитают (буферное значение заднего хода) (S26) в качестве значения активации DTC для вычисления точек срабатывания DTC для переднего и заднего хода. Значение 0,25 В основано на мертвой зоне, используемой в данном иллюстративном варианте осуществления, и может отличаться для различных машин, или операций. Затем значение (С) вычитают для получения либо буферного значения переднего хода, либо буферного значения заднего хода в (D). Для вычисления буферного значения переднего хода, для значения (С) используют переднее среднее значение остановки (S28). Для вычисления буферного значения заднего хода, для значения (С) используют заднее среднее значение остановки (S30). Когда рассчитывают буферное значение переднего хода и буферное значение заднего хода, они могут использоваться для определения величины регулирования, необходимой системе для достижения желательного результата.
Таблица Т1 на фиг. 8 показывает иллюстративный вариант осуществления определения, какая в системе необходима величина регулирования. Значения (А1) представляют буферное значение переднего хода, а значения (В1) представляют буферное значение заднего хода. На пересечении вычисленных значений определяют величину регулирования. Если смотреть со стороны перемещения рукоятки оператором, регулировка может соответствовать перемещению центрального положения между первым продвижением вперед и первым продвижением назад для его перемещения в направлении центра остановки. В определенных вариантах осуществления это может обеспечить, что центр первого движения попадает в пределы нейтрального участка, и что первое движение вперед и первое движение назад находятся за пределами нейтрального участка 58. В определенных вариантах осуществления центр первого движения по существу выровнен с центром остановки после регулирования. Если смотреть из положения поперечного рычага и датчика движения, регулируют положение мертвой зоны остановки.
Таблица Т1 показывает пример таблицы, который может использоваться, когда буферное значение одинаково в направлениях переднего и заднего хода. Таблица Т2 на фиг. 9 показывает еще один иллюстративный вариант осуществления определения, когда буферное значение смещается в сторону направления заднего хода. Значения (А2) представляют буферное значение переднего хода, а значения (В2) представляют буферное значение заднего хода.
В иллюстративном варианте осуществления регулировка достигается с помощью механизма регулирования, например, при регулировке положения приводного троса 102 относительно оболочки троса. Это может достигаться посредством поворота контргайки 100, связанной с приводным тросом 102, как показано на фиг. 12. Цифры, обозначенные на чертеже на фиг. 10 и 11, представляют количество поворотов контргайки 100, необходимых для регулирования системы. Приводной трос 102 может продолжаться между рукояткой 40 и рычагом 44 независимой подвески, а поворот контргайки 102 может регулировать длину приводного троса 102, либо с укорачиванием троса, либо с удлинением троса. Если значения попадают в диапазон DTAC, требуется дополнительное воздействие и ремонт системы, например, в дилерском или ремонтном центре. В различных вариантах осуществления вычисления и ссылки на таблицы могут выполняться автоматически или полуавтоматически, диагностическим средством или системой управления.
В определенных обстоятельствах перед выполнением стадии калибровки, описанной выше, может быть необходимо выполнить грубую регулирование механического центра. Согласно различным иллюстративным вариантам осуществления пользователь может вручную располагать оболочку троса в центре, как показано на стадиях, показанных на фиг. 11А-11Н. Сначала рукоятку помещают в положение остановки, и пользователь толкает поперечный рычаг 104, прикрепленный к тросу 106, в направлении передней части машины (ФИГ. 11А) в то время, как рукоятка удерживается на месте, и делает первую метку 108, где трос 106 выходит из оболочки 110 (ФИГ. 11В). Затем поперечный рычаг 104 тянут в направлении задней части машины (ФИГ. 11С) в то время, как рукоятка удерживается на месте, и вторую метку 112 помещают, где трос 106 выходит из оболочки 110 (ФИГ. 11D). Затем центральную метку 114 помещают в центре первой и второй меток 108, 112 (ФИГ. 11Е). Затем инструмент 116 выравнивания рулевого управления соединяют с механизмом рулевого управления (ФИГ. 11F), и контргайки 100 регулируют до тех пор, пока оболочка 110 не соприкоснется с центральной меткой 114 без всякого приложения усилия к системе (ФИГУРЫ 11G-H).
Приведенное выше подробное описание некоторых иллюстративных вариантов осуществления было представлено для объяснения общих принципов и практического применения, обеспечивая посредством этого понимание квалифицированными специалистами в данной области раскрытия для различных вариантов осуществления и с различными модификациями, которые подходят для конкретного предусматриваемого использования. Предполагается, что данное описание необязательно должно быть исчерпывающим или ограничивать раскрытие иллюстративными раскрытыми вариантами осуществления. Любой из вариантов осуществления и/или элементов, раскрытых здесь, могут быть объединены друг с другом для образования различных дополнительных вариантов осуществления, конкретно не раскрытых. Соответственно, возможны дополнительные варианты осуществления, которые предполагают охват данным описанием и объемом правовых притязаний приложенной формулы изобретения. Описание описывает конкретные примеры достижения более общей цели, которая может достигаться другим путем.
Как использовано в данной заявке, термины «передний», «задний», «верхний», «нижний», «вверх», «вниз» и другие показатели ориентации, предназначенные для облегчения описания иллюстративных вариантов осуществления представленной заявки, и не предназначены для ограничения конструкции иллюстративных вариантов осуществления представленной заявки каким-либо конкретным положением или ориентацией. Термины степени, такие как «по существу» или «приблизительно», как понимают рядовые специалисты, должны относиться к разумным диапазонам за пределами заданного значения, например, к общим допускам, связанным с изготовлением, сборкой и использованием описанных вариантов осуществления.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ ПОВТОРНОЕ ЦЕНТРИРОВАНИЕ СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ | 2015 |
|
RU2684824C2 |
| ПРОТИВОЗАНОСНАЯ ТОРМОЗНАЯ СИСТЕМА С ДОПОЛНИТЕЛЬНЫМИ КОЛЕСАМИ | 1996 |
|
RU2116912C1 |
| РАБОЧЕЕ ТРАНСПОРТНОЕ СРЕДСТВО С ПЕРЕКЛЮЧАЕМОЙ СИСТЕМОЙ УПРАВЛЕНИЯ ПЕРЕДВИЖЕНИЕМ | 2020 |
|
RU2765167C2 |
| УПРАВЛЕНИЕ ПРИВОДОМ НА ПЕРЕДНИЕ КОЛЕСА | 2013 |
|
RU2652670C2 |
| СИСТЕМА УПРАВЛЕНИЯ БЕССТУПЕНЧАТОЙ КОРОБКОЙ ПЕРЕДАЧ | 2008 |
|
RU2475669C2 |
| УСТРОЙСТВО для УПРАВЛЕНИЯ ДВИГАТЕЛЕМ | 1967 |
|
SU202741A1 |
| СПОСОБ И СИСТЕМА ДЛЯ НАНЕСЕНИЯ ДОРОЖНОГО ПОКРЫТИЯ, ВКЛЮЧАЮЩАЯ ТРАНСПОРТНОЕ СРЕДСТВО - УКЛАДЧИК ДОРОЖНОГО ПОКРЫТИЯ И ГРУЗОВИК-ПИТАТЕЛЬ | 2002 |
|
RU2299944C2 |
| СИСТЕМА РУЛЕВОГО УПРАВЛЕНИЯ С ПРИВОДОМ НА ПЕРЕДНИЕ И ЗАДНИЕ КОЛЕСА | 1992 |
|
RU2032569C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| УНИВЕРСАЛЬНАЯ ГЕНЕРИРУЮЩАЯ УСТАНОВКА ТЕПЛОВОГО ГАЗОВОГО ПОТОКА НА ТАНКОВОМ ШАССИ И ПРИВОД УПРАВЛЕНИЯ КРАНОМ ПОДАЧИ ТОПЛИВА ГЕНЕРАТОРА ТЕПЛОВОГО ГАЗОВОГО ПОТОКА | 2007 |
|
RU2353887C2 |
Изобретение относится к гидростатическим приводам для машин с промышленными, сельскохозяйственными и другими задачами. Способ регулирования системы гидравлического привода включает определение значения переднего положения остановки, значения заднего положения остановки, значения исходного положения переднего хода и значения исходного положения заднего хода устройства управления и использование данных значений для вычисления буферного значения переднего хода и буферного значения заднего хода. Буферное значение переднего хода и буферное значение заднего хода используют для определения величины регулирования системы привода. Величина регулирования может использоваться для регулирования надлежащим образом системы привода, чтобы избежать ошибок системы. Изобретение обеспечивает регулирование производительности гидравлического насоса. 3 н. и 17 з.п. ф-лы, 18 ил.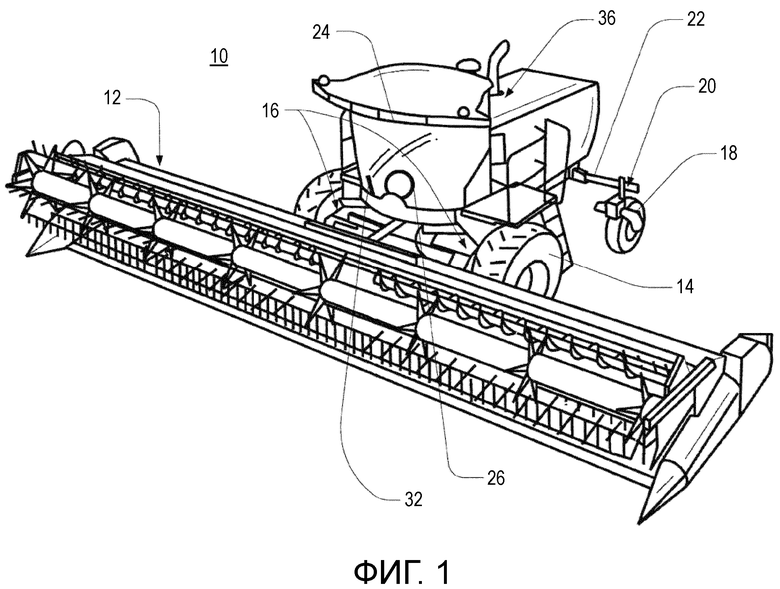
1. Способ регулирования системы гидравлического привода, включающий:
приведение в действие системы привода, имеющей устройство управления, которое функционально соединено с тросом и гидравлическим насосом, при этом устройство управления выполнено с возможностью перемещения так, чтобы вызывать перемещение троса, а трос выполнен с возможностью перемещения так, чтобы вызывать регулирование производительности гидравлического насоса;
определение в процессе работы переднего положения остановки устройства управления и переднего значения остановки, связанного с передним положением остановки;
определение в процессе работы заднего положения остановки устройства управления и заднего значения остановки, связанного с задним положением остановки;
определение в процессе работы исходного положения переднего хода устройства управления и исходного значения переднего хода, связанного с исходным положением переднего хода;
определение в процессе работы исходного положения заднего хода устройства управления и исходного значения заднего хода, связанного с исходным положением заднего хода;
использование значения переднего положения остановки, значения заднего положения остановки, значения исходного положения переднего хода и значения исходного положения заднего хода для вычисления буферного значения переднего хода и буферного значения заднего хода; и
использование буферного значения переднего хода и буферного значения заднего хода для определения величины регулирования системы привода.
2. Способ по п. 1, в котором определение переднего положения остановки включает перемещение устройства управления из положения переднего ограничителя в переднее положение остановки, а определение заднего положения остановки включает перемещение устройства управления из положения заднего ограничителя в заднее положение остановки.
3. Способ по п. 2, в котором определение переднего значения остановки включает перемещение устройства управления из положения переднего ограничителя в переднее положение остановки множество раз, определение значения, связанного с каждым разом, и получение среднего значения для получения переднего значения остановки.
4. Способ по п. 1, в котором определение переднего значения остановки включает получение значения напряжения от датчика движения.
5. Способ по п. 1, в котором определение исходного положения переднего хода включает перемещение устройства управления из положения остановки в направление вперед до тех пор, пока не будет определено исходное включение насоса, а определение исходного положения заднего хода включает перемещение устройства управления из положения остановки в обратное направление до тех пор, пока не будет определено исходное включение насоса.
6. Способ по п. 1, в котором буферное значение переднего хода и буферное значение заднего хода приведены в таблице для определения величины регулирования.
7. Способ по п. 1, в котором величина регулирования связана с регулированием положения троса относительно насоса.
8. Способ по п. 7, в котором трос соединен с рычагом независимой подвески, а регулирование положения троса регулирует длину троса между рычагом независимой подвески и устройством управления.
9. Способ по п. 7, в котором положение троса регулируется посредством вращения крепежного средства.
10. Способ по п. 1, в котором устройство управления представляет собой рукоятку, выполненную с возможностью перемещения в щели.
11. Способ по п. 1, в котором система привода включает область мертвой зоны, при этом перемещение устройства управления в области мертвой зоны не вызывает регулирование производительности гидравлического насоса, и при этом величина регулирования системы привода коррелирует с регулированием положения области мертвой зоны.
12. Способ регулирования системы гидравлического привода, включающий:
приведение в действие системы привода, содержащей рукоятку, выполненную с возможностью перемещения в щели, при этом рукоятка выполнена с возможностью перемещения для регулирования перемещения транспортного средства;
определение в процессе работы переднего положения остановки рукоятки и переднего значения остановки, связанного с передним положением остановки;
определение в процессе работы заднего положения остановки рукоятки и заднего значения остановки, связанного с задним положением остановки;
определение в процессе работы исходного положения переднего хода рукоятки и значения переднего хода, связанного с исходным положением переднего хода;
определение в процессе работы исходного положения рукоятки заднего хода и значения перемещения назад, связанного с исходным положением заднего хода;
использование переднего значения остановки, заднего значения остановки, значения переднего хода, и значения перемещения назад для вычисления буферного значения переднего хода и буферного значения заднего хода; и
использование буферного значения переднего хода и буферного значения заднего хода для определения величины регулирования системы привода.
13. Способ по п. 12, в котором вычисление буферного значения переднего хода включает получение среднего значения переднего хода и значения перемещения назад, а впоследствии вычитание переднего значения остановки.
14. Способ по п. 13, в котором перед вычитанием переднего значения остановки к среднему значению калибровки переднего хода и значению калибровки заднего хода добавляют значение активации DTC.
15. Способ по п. 12, в котором вычисление буферного значения заднего хода включает получение среднего значения переднего хода и значения перемещения назад, а впоследствии вычитание заднего значения остановки.
16. Способ по п. 15, в котором перед вычитанием заднего значения остановки из среднего значения переднего хода и значения перемещения назад вычитают значение активации DTC.
17. Способ по п. 12, в котором щель содержит участок переднего хода, участок заднего хода и участок мертвой зоны, при этом перемещение рукоятки на участке мертвой зоны не приводит к движению транспортного средства.
18. Способ по п. 17, в котором величина регулирования соответствует регулировке положения области мертвой зоны.
19. Способ по п. 18, в котором положение области мертвой зоны регулируют посредством регулирования положения оболочки троса, функционально соединенного с рукояткой и с гидравлическим насосом.
20. Способ выполнения ручного регулирования системы гидравлического привода, имеющей гидравлический насос, рукоятку, выполненную с возможностью приведения в действие гидравлического насоса, поперечный рычаг, функционально соединенный с гидравлическим насосом, трос, функционально соединенный с рукояткой и с рычагом независимой подвески, и оболочку, расположенную вокруг троса, при этом способ включает:
смещение поперечного рычага в переднее положение и создание первой метки, где трос выходит из оболочки;
смещение поперечного рычага в заднее положение и создание второй метки, где трос выходит из оболочки;
создание третьей метки по существу на равном удалении между первой меткой и второй меткой; и
изменение механизма регулирования для регулирования положения троса таким образом, чтобы выход из оболочки был по существу выровнен с третьей меткой.
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКОЙ СИСТЕМОЙ И СООТВЕТСТВУЮЩАЯ ГИДРАВЛИЧЕСКАЯ СИСТЕМА | 2013 |
|
RU2624143C2 |
| Устройство брандспойта для обдувки дымогарных труб | 1927 |
|
SU9810A1 |
| КАСКОДНЫЙ ДИФФЕРЕНЦИАЛЬНЫЙ УСИЛИТЕЛЬ | 2006 |
|
RU2319291C1 |
| US 2011257854 A1, 20.01.2011 | |||
| US 4473141 A, 25.09.1984. | |||

